
Abstract
The determination of a suitable correction for tip blunting is crucial in order to obtain useful mechanical properties from nanoindentation experiments. While typically the required area function is acquired from the indentation of a reference material, the direct imaging by suitable methods is an interesting alternative. In this paper, we investigate the applicability of confocal laser scanning microscopy (CLSM), atomic force microscopy (AFM), and self-imaging by scanning a sharp silicon tip using the scanning probe microscopy extension of the nanoindentation system and compare the results to the area function obtained by the indentation of fused silica. The important tip characteristics were determined by various methods based on the analysis of the obtained 3D data sets. It was found that the suitability of CLSM and AFM depend on the resolution and the operation mode, respectively. While for these methods only limited consistency of the determined tip characteristics was found, self-imaging resulted in an excellent overall agreement.
Graphic abstract

Similar content being viewed by others


Introduction
The hardness and elastic modulus of materials at the small scale or of thin coatings can be conveniently determined using nanoindentation [1]. In this method, the load P (typically in the µN to lower mN range) and displacement h (typically < 500 nm) of a hard probe that is pressed into the material of interest are continuously recorded. Subsequently, the resulting load–displacement curves are analyzed using a suitable evaluation procedure. Nowadays, the well-established Oliver and Pharr method is certainly the most common way to determine hardness and elastic modulus of materials from nanoindentation data [2, 3]. This method takes advantage of the fact that the unloading curve initially follows a power-law function with an exponent m in the range of 1.2–1.6 [4]. An adequate fit then allows to determine the contact stiffness S and consequently the contact depth hc from the unloading slope at maximum load Pmax. In order to be able to deduce the desired mechanical properties of the sample, one of the crucial points in this method is the precise knowledge of the indenter shape, specifically the size of the projected area in contact between tip and sample at hc, also termed as the contact area Ac. This is a consequence of the fact that at the small indentation depths employed in nanoindentation even the most carefully fabricated probe cannot be assumed to be ideally shaped and suitable corrections, therefore, need to be applied. Newly fabricated Berkovich tips (the most commonly used probe shape, a three-sided pyramid with a face angle of 65.27°) normally exhibit a rounding with a radius in the range of approximately 100 nm in the vicinity of the apex [5]. This value, however, strongly increases over time as a result of tip wear [5, 6] and constant monitoring of the tip shape is, therefore, vital.
Two different methods that allow the determination of the depth-dependent contact area Ac(hc), usually termed ‘area function’, are used today. The first method is the indentation of a reference material with known mechanical properties such as fused silica. In this case, Ac is determined in a reverse approach from the measurement of the mechanical properties at different indentation depths using either or both of the following two relationships [3]:
and
where H is the hardness of the calibrant, Er is the reduced modulus of the sample/indenter system, and β is a correction factor taking the non-circular cross-section of the indentation probe into account. However, this approach relies on certain prerequisites including the precise knowledge of the mechanical properties of the used reference material, which should ideally be depth independent, as well as the prior correction of the data for other influencing factors such as initial penetration and frame compliance.
The second method is the direct imaging of the tip with a suitable metrological technique such as scanning probe microscopy. Numerous publications have already reported on the characterization of the tip by atomic force microscopy (AFM), proving the principle feasibility of this approach [6,7,8,9,10,11]. However, a precisely calibrated measurement device that does not introduce any artifacts and yields reproducible results is required. Both prerequisites are sometimes difficult to achieve with AFM, especially when the measurement is not performed in the correct operation mode [10].
It was found that area functions determined by indentation and direct measurements may deviate significantly for the same tip [6, 7, 10, 12, 13]. Choduba and Jennett have attributed the difference to be due to the radial displacement of the indented material which results in an underestimation of the area function when determined by indentation of known materials [13]. A correction for this effect is in principle possible [6, 13,14,15] and should indeed be conducted for area functions determined from the indentation of materials [14], but is rarely performed on a regular basis.
In spite of the presently available numerous investigations on the direct measurement of nanoindentation area functions, no systematic comparison of the different available techniques has been presented. The aim of the present work is to compare the area function of a Berkovich diamond tip determined by different imaging techniques including confocal laser scanning microscopy (CLSM), AFM, and scanning a sharp tip with the indenter itself (self-imaging). The obtained results are discussed in relation to the area function determined by the indentation of fused silica such as is most commonly performed. The characteristics of the tip are determined from the recorded data points using custom made Python code. Several different methods for the determination of the tip radius were employed and compared for the different techniques showing clearly the merits and drawbacks of each method.
Results and discussion
Determination of the tip characteristics
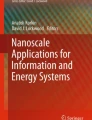
All of the three methods, i.e., CLSM, AFM, and self-imaging, yield the surface of the investigated Berkovich tip as a three-dimensional dataset of x, y, and z coordinates, which is schematically shown in Fig. 1a. The obtained data sets were analyzed using custom made Python scripts. In order to characterize the measured tip, the 3D dataset was separated into three subsets with each belonging to one of the three sides of the tip. To achieve that, the edges of the tip were initially determined by employing a custom made user interface allowing to click into the image at the location of each of the three edges. The points belonging to the three faces were then found by analyzing the angles of the vectors between each point and a first estimation of the apex. The data points were assigned to the individual faces if their angles were between the angles of the two enclosing edges. However, the regions close to the apex (a few ten nm from the top) as well as close to the edges (± 15° from the edges) were not considered in order to avoid the influence of tip or edge rounding on the fit results. This is indicated by the colored areas in Fig. 1a. Subsequently, each dataset was fitted by a plane allowing the determination of the tip characteristics as shown in Fig. 1b. For the evaluation, the z-coordinate was defined to be counted positive from the topmost recorded point inwards into the tip. From the fits, the plane normal vectors \(n_{i}\) can be determined as well as the apex \(A\), which is the intersection point of the three planes. \(A\) was taken as one point lying on the tip axis, while a second one was found by adding the unit normal vectors of the planes \(\hat{n}_{i}\) to \(A\) subsequently allowing to determine the tilt angle of the tip with respect to the z-direction \({\Phi }\). The angles between the faces of the tip and the tip axis \(\varphi_{i}\) are determined as the complementary angle between the respective normal vector and the tip axis. Ideally, for a Berkovich tip, this value is 65.27° and is the same for all three faces. From this angle, the equivalent cone angle \(\theta\) can be calculated as follows:
which results in a value of 70.3° for the ideal Berkovich case. By averaging \(\varphi_{i}\) and applying this equation \(\theta\) was estimated for the investigated tip. The distance between the apex and the topmost measured point is the blunting depth \(h_{b}\) and can be used for an estimation of the tip radius, as described below.

(a) Schematic showing the measured data points (black dots) and resulting surface of a Berkovich indenter as recorded by the different imaging methods. The regions used for fitting the faces are indicated as colored areas. (b) Schematic of the fit result. The parameters determined from the fit are the plane representations of the three faces of the tip, their normal vectors \(n_{i}\), their inclination angles with respect to the tip axis \(\varphi_{i}\) (only \(\varphi_{1}\) is shown here), the inclination angle of the tip axis with respect to the z-direction \({\Phi }\) , and the blunting depth \(h_{b}\). The apex of the tip \(A\) is the intersection of the three faces. The tip’s axis was determined as the connecting line between the tip apex and the resulting point when the three unit normal vectors \(\hat{n}_{i}\) of the faces are added to \(A\). Note that the z-direction is not in scale with the x and y directions.
Another important tip characteristic is the radius at the apex \(R\) which is a useful indicator of tip wear as this value tends to increase with the time the tip is in use. There are several ways to obtain an estimation of the tip radius, most of which assume that the tip can be accurately modeled by a sphero-conical indenter. Here, four different possibilities are described and compared to the value obtained for a Hertzian contact of a sphere in the initial elastic regime of an indentation experiment (Fig. 2a).

Determination of the tip radius \(R\) by (a) fitting the loading curve to a completely elastic indent assuming Hertzian contact with a sphere, (b) fitting a sphere to the recorded points (z-direction of the inset is not to scale), (c) determination of the contact depth at which an ideal sphero-conical indenter transforms from a sphere to a cone \(h_{s}\) from the ratio of measured and ideal area, and (d) fitting a circle to the contact radius. Additionally, a linear fit to the contact radius at larger contact depths allows to determine the equivalent cone angle \(\theta\). The points shown in (a) were recorded by indenting fused silica assuming a reduced modulus of 69.6 GPa. The exemplary data displayed in (b)–(d) were recorded by self-imaging.
In the case of a Hertzian contact of a sphere with an initially flat, elastic solid, the load–displacement curve follows the relationship [1]:
As can be seen from Fig. 2a, a reasonable fit to an elastic P–h curve recorded with the investigated tip can be obtained for a radius of ~ 400 nm for the indentation of fused silica (\(E_{r}\) of 69.6 GPa) [3]. This value is substantially higher than typically reported for new tips (≤ 100 nm) and, therefore, indicates that the tip has already been extensively in use.
As already mentioned, four different methods for the determination of \(R\) from the 3D data sets acquired by the imaging techniques were used. METHOD I: One method that is in principle straight forward is the direct fit of the topmost data points with the equation of a sphere
where \(x_{c}\), \(y_{c}\) , and \(z_{c}\) are the coordinates of the center of the sphere, with \(x_{c}\), \(y_{c}\), \(z_{c}\) , and \(R\) being the parameters refined during the fitting process. As can be seen from Fig. 2b, a sphere is in principle able to reasonably fit the data points around the apex. However, as can also be seen from this figure, the resulting tip radius depends strongly on the limit used for cropping the data points for the fit. When a too large portion of the tip is used, i.e., the limit is large, many data points contribute to the fit that rather belong to the side planes than to the spherical cap, which leads to an overestimation of \(R\). The choice of the limit is, therefore, critical and might result in large deviations from the real radius. That also means that the result of the fit is strongly dependent on the subjective judgment of the experimentalist, that is if no reproducible physical meaningful limit is used. One reasonable choice for the limit can be the depth at which an ideal sphero-conical indenter transforms from a sphere to a cone \(h_{s}\), since up to this depth, the indenter shape should ideally follow that of a sphere. \(h_{s}\) can be determined from the area ratio of actual tip area and ideal area, as demonstrated in Fig. 2c. For a sphero-conical indenter, the area ratio at \(h_{s}\) is equal to \(\left( {\frac{1}{\sin \left( \theta \right)} + 1} \right)^{2}\) [1]. At smaller depths, theoretically, only points situated on the spherical part should contribute to the fit and a constant value for the radius is, therefore, expected. In our case, however, a minimum is observed exactly at \(h_{s}\) for the measurement of the tip by self-imaging. The increase below this value results from the fact that a Berkovich tip does not exhibit an ideal transition from cone to sphere as the triangular cross-section of the pyramid cannot be directly placed on the circular cross-section of a sphere. Hence, the transition is quite complex in reality which can be perceived to some extent from the fit in Fig. 2b. At the smallest limits below 5 nm, a large drop in the radius is again observed which is most likely due to the increased influence of noise resulting from an ever smaller number of data points used for the fit. Nonetheless, it can be concluded from the presented results that \(h_{s}\) appears to provide a useful limit that is independent of subjective influences.
METHOD II: In addition to serving as a physical limit to the fitting of a sphere, \(h_{s}\) allows to estimate \(R\) directly via the relationship \(h_{s} = R\left( {1 - \sin \left( \theta \right)} \right)\) [1, 6]. METHOD III: Similarly, the blunting depth \(h_{b}\) is linked to \(R\) via a simple relationship, namely, \(R = h_{b} \left( {\frac{1}{1 - \sin \left( \theta \right)} - 1} \right)\). As mentioned before, \(h_{b}\) can be determined from the pyramidal fit as the distance between the topmost data point and the apex determined by fitting the pyramid faces. METHOD IV: Finally, \(R\) can be estimated from a fit to the contact radius \(r_{c}\) which is calculated from the area via \(r_{c} \left( {h_{c} } \right) = \sqrt {A\left( {h_{c} } \right)/\pi }\). The resulting contact radius can be divided into two regions with respect to the contact depth. The region close to the apex is circular shaped in the ideal case and a corresponding fit allows to estimate the tip radius. Here, similar considerations as for the spherical fit of the 3D data concerning the choice of the fit limit apply and \(h_{s}\) may serve as a suitable limit as well. The second region farther away from the tip follows a linear relationship. For a cone, the slope is \({\text{tan}}\left( \theta \right)\) and a linear fit consequently allows to determine the equivalent cone angle θ and can be compared to the value obtained from the pyramidal fit presented in Fig. 1.
Comparison of the imaging techniques
Images and cross-sections
Four different measurement techniques were used to assess the same tip which deviate considerably in resolution as well as in how much of the tip can be accessed, see Table 1. While in the case of CLSM the image size was comparatively large (~ 65 µm × 65 µm), the image size of the self-imaging was only 2 µm × 2 µm. For the CLSM , two different image resolutions of 1024 × 1024 pixels (low resolution) and 4096 × 4096 pixels (high resolution) were chosen, while the scan size was kept the same in both cases. The AFM measurement exhibited a medium resolution of 512 × 512 pixels as well as medium scan size (10 µm × 10 µm). Although only 256 × 256 pixels are available in the self-imaging measurement, it exhibits the highest spatial resolution of 7.8 nm in x and y due to the small image size.
The resulting images are shown in Fig. 3. A two-dimensional edge detection filter (Sobel filter) was applied to these images which gives a good visual impression of the tip shape. This is especially interesting for the regions near the apex and edges of the tip. Of course, other possible damages like breakouts and cracks can also be detected, as well as debris that might have accumulated on the tip surface. Therefore, such images can be conveniently used to visually assess the quality and current state of the nanoindentation tip. Furthermore, this filter greatly improves the visibility of minor features that may be present in the images. Such features could be perceived as scratches in (c) and (d) and are most probably related to minor artifacts from the scanning as well as grinding marks resulting from the fabrication of the Berkovich tip. However, any influence of these features on the subsequently performed evaluations is unlikely. This assumption is corroborated by the fact that these artifacts are hardly detectable in the evaluated cross-sections presented in Fig. 4.

Images of the Sobel-filtered 3D datasets recorded with (a) CLSM low resolution, (b) CLSM high resolution, (c) AFM and (d) self imaging. Mind the different scale in (d).

Cross-sections determined from the three dimensional datasets recorded with (a) CLSM low resolution, (b) CLSM high resolution, (c) AFM and (d) self imaging using the “marching squares” algorithm. Mind the different range of contact depths in (d).
Although all images show the expected triangular pyramidal shape with the apex in the center of the images, there are some important differences observable. First, it appears that AFM and self-imaging appear much ‘sharper’ compared to the CLSM images in general. This applies especially to the edges where an unexpected contour best described as ‘double edges’ seems to be present in the CLSM images. The exact origin of these features remains unclear at the moment, but might be related either to an additional reflection of the laser at the edges of the tip or the transparency of diamond. Zong et al. suggested to coat the diamond tip with gold prior to the CLSM investigation [16]. However, although no close-up images of the region around the apex are presented in their paper, it appears that similar artifacts are present in spite of the deposited gold layer. Another obvious difference in the images is that in the self-imaging case additional faces are observed surrounding the central pyramid. This is a result of the fact that the grating used for imaging the tip consists of several sharp silicon tips that have a nominal distance of 2.12 µm. That means that for the present scan size the measureable depth range is limited by the fact that at some positions the nanoindentation tip will be in contact with an adjacent silicon tip that is not intentionally used for measurement (see also [17]). We found that this limits the accessible depth where the cross-section of the tip is completely preserved to typically 150–200 nm. For other tip geometries, such as the cube corner for instance, which has a smaller equivalent cone angle and thus steeper pyramid faces, different accessible ranges can be expected.
The cross-sectional areas as a function of the distance from the tip apex, i.e., \(A_{c} \left( {h_{c} } \right)\) were obtained by the application of the ‘marching squares’ algorithm to the 3D datasets. The resulting areas are displayed in Fig. 4 for the different imaging techniques. The ‘double edge’ artifacts become immediately obvious in the case of the CLSM images. It seems that the increased resolution leads to an exaggeration of this effect (Fig. 4b) and for this measurement the topmost area at 25 nm is not even in the center of the tip anymore. Another feature which is not obvious from the Sobel-filtered images, but can be seen from the cross-sections is that there appears to be a dip on the left face of the AFM measurement. A similar dip can be observed in the CLSM measurements, but is absent in the self-imaging case. Barone showed for a Berkovich tip that the scan direction can have a considerable influence on the result in AFM and subtracting the measurement from one direction from the measurement of the opposite direction resulted in considerable differences [10]. Incidentally their tip was oriented the same as shown in Fig. 4c and the largest difference of ~ 40 nm was observed also in the same place as the dip here. In contrast to the other images, the self-imaging measurement exhibits sharp edges and appears to be generally free of artifacts.
In order to obtain an area function that can be used for the correction of experimental nanoindentation data the depth-dependent cross-sectional areas were fitted using the polynomial equation as suggested by Oliver and Pharr [2]
For an ideally sharp Berkovich indenter, the coefficient \(C_{0}\) is 24.5, while all other coefficients are zero. Although there have been affords to find more suitable area function equations [12, 16, 18], the goal here was to adequately fit the data, for which this simple formula is fully appropriate. It was found for the real indenter measurements presented in this paper that the first three terms alone are able to acceptably fit the cross-sectional areas, especially when the first coefficient is allowed to be refined as well. An exemplary fit of the self-imaging cross-sections is shown in Fig. 5a. A comparison of the measured and fitted area functions determined with the different imaging techniques divided by the ideal contact area (the dotted lines in Fig. 5) are displayed for the first 200 nm in Fig. 5b. The dashed line is the area function determined by the indentation of fused silica. All area functions determined by the direct methods are situated above the area function determined by indentation. However, while the AFM and high-resolution CLSM images are quite far off, the difference between the indentation experiment and the self-imaging and low-resolution CLSM measurements is considerably smaller. In fact, they are merging at contact depths larger than approximately 120 nm. The difference between the two resolutions of the CLSM experiment can be explained by the more pronounced artifacts in the high-resolution case which led to a more prominent overestimation of the contact area and a convergence to the values of self-imaging and low-resolution CLSM occurs only above 200 nm. It can be seen that the artifact close to the apex results even in an unphysical decrease of the area ratio. The AFM measurement yielded too large area values in general which can be explained by the evaluation of the tip characteristics shown in the following section.

(a) Area function and fit of the dataset recorded using self-imaging. (b) Area ratio for the areas determined using the different techniques compared to the area ratio determined by the indentation of fused silica.
Tip characteristics
The reason for the discrepancy in the evaluated cross-sections becomes obvious when the face angles of the tip are evaluated (Fig. 6a). It can be seen that while the CLSM and self-imaging measurements result in consistent face angles and equivalent cone angles that are close to the ideal values of 65.27° and 70.3°, respectively, the AFM measurement is considerably higher. The explanation for this difference is most probably the fact that the AFM measurement was performed in tapping mode due proper contact mode probes (cantilevers) being unavailable. According to Ref. [10], there is an influence of the operation mode of the AFM device on the resultant face angles of a Berkovich tip. It was found that for the tapping mode, the angles were too high by ~ 2°–3° and that correct values could only be obtained for the combination of contact mode and constant height operation. Unfortunately, constant height mode operation is not implemented in the used AFM system. A work around would only be possible by switching off the height control feedback and recalculating the height differences from the cantilever deflection. However, that would require several calibration steps, each bringing in an additional error. Without feedback, drift effects would also be less controllable making the measurement less reliable. Therefore, we did not see a gain in accuracy by using contact mode measurements. A deeper look into AFM imaging methods is necessary to completely understand this difference and is planned in the future.

(a) Face angles and equivalent cone angle and (b) tip radius determined by the different tip imaging techniques and evaluation methods.
Due to the small region of the tip that can be measured by self-imaging, the spread of the individual face angles is considerably larger than compared to the CLSM measurements. Since only the top 150–200 nm are available for self-imaging, fabrication inaccuracies and tip wear that are both more likely to play a role close to the apex result in these deviations. At distances farther away from the tip, which are only accessible by the large measurement range available in the CLSM, a perfect coincidence of the three side angles is observed. Concerning the determination of the equivalent cone angle, Fig. 6a evidences that a fit of the faces and a fit of a line to the contact radius result principally in similar values. For the self-imaging method, even a perfect agreement was observed. In contrast, for the CLSM measurements, the fit of the faces results in the most appropriate values as the artifacts around the edges are less of a consideration far away from the apex. The fit of the angle to the contact radius on the other hand was performed in the top few 100 nm, where artifacts are clearly expected to influence the fit result.
The evaluated tip radius depends strongly on both the imaging technique and evaluation method used, see Fig. 6b. While its determination using the blunting depth is comparatively close to the value obtained for the elastic indentation assuming Hertzian contact in all cases, the other values deviate significantly. Especially, the CLSM high-resolution and AFM measurements exhibit a vast spread which is most probably related to the presence of the abovementioned artifacts. Since these artifacts are less pronounced in the low-resolution CLSM case, an acceptable accordance is found there. The only exception is the direct spherical fitting to the topmost data points which is invariably affected by the artifact. The self-imaging results, on the other hand, agree very well with the Hertzian value of 400 nm, suggesting that the acquired data exhibited the highest quality. In this case, even the spherical fitting is quite close to the expected value evidencing that a sufficiently high data quality allows some flexibility in choosing the evaluation method. In addition to the graphical representation of the results, a more complete overview of the evaluated tip characteristics is given in Table 2.
Evaluation of fused silica
The ultimate goal of the area function determination is of course the finding of a suitable measure of correction for the data obtained from an actual indentation experiment. In order to test their applicability, all area functions shown in Fig. 5b were applied to a depth-dependent nanoindentation experiment of fused silica. The resulting hardness and reduced modulus values are displayed in Fig. 7. For fused silica, a constant hardness value in the range of approximately 9 GPa is expected [13]. The ‘indentation’ area function was determined using the Oliver and Pharr method assuming a constant reduced modulus of 69.4 GPa for the fused silica/diamond pairing. Since fused silica was used as calibrant for the determination of the ‘indentation’ area function, the correction using this area function yields a constant hardness value close to the expected one, albeit using the data of a different series of indentations. All other area functions were found to be higher in general (Fig. 5b), therefore resulting in smaller hardness and reduced modulus values. While the high-resolution CLSM and AFM are unrealistically low, the low-resolution CLSM and self-imaging measurements appear closer to the expected value and approach to a constant hardness value of slightly above 8 GPa at contact depths exceeding 125 nm and 75 nm, respectively. Similarly, the reduced modulus is generally underestimated and is about 65 GPa in the constant region of the self-imaging and low-resolution CLSM measurement.

(a) hardness of fused silica and (b) reduced modulus for the indentation of fused silica evaluated using the area functions determined with the different imaging techniques in comparison with the mechanically determined values. Additionally, the dashed red lines indicate the data obtained with the self-imaging area function corrected for radial displacement using Eq. (7a), (7b), and (7c).
The origin of the underestimated values can be found in the radial displacement of the material deformed under the indenter. It has been found that for direct imaging methods, the area is generally overestimated when no correction for radial displacement is applied [13, 14]. In order to estimate the influence of the radial displacement, the results obtained with the self-imaging data were corrected for radial displacement by iteratively applying the equations given in annex I of the ISO 14577-1 [14].
and
with
Here, the subscript \(0\) refers to the initially obtained value, \(i\) indicates the iteration step, and \(\nu\) is the Poisson’s ratio of the sample. Convergence was achieved after less than five iterations in all cases. The corrected hardness and reduced modulus values are displayed as dashed lines in Fig. 7. It can be seen that with this correction, a perfect agreement between the correction with the area function produced by indentation and self-imaging was obtained in the constant region above 75 nm for both hardness and reduced modulus. It needs to be mentioned that the effect of radial displacement does not play a role in the correction of data obtained for material that has the same Poisson’s ratio as the calibration material [15], such as is naturally the case for the fused silica/fused silica pairing. Therefore, the expected values are obtained for the data corrected by the indentation area function here without the necessity of correcting it for radial displacement. However, the situation might be different for the indentation of sample/calibrant pairings with different Poisson’s ratios. Consequently, the presented findings suggest that the effect of the radial displacement indeed results in the observed discrepancy between direct imaging and indirect determination of the area function by indentation. Since the low-resolution CLSM approaches the same constant hardness value as the self-imaging, a similar result can be expected at contact depths exceeding 150 nm.
In addition to the offset in hardness, there appears to be a decrease at low contact depths when it is evaluated using any area function recorded by direct tip imaging. For self-imaging the drop is notable below 50 nm. Such a decrease has been reported by several authors and has been attributed to the rounding of the tip [12, 19,20,21,22]. For a perfectly sharp pyramid the hardness is constant due to the self-similarity as can be seen here for higher contact depths. Close to the apex, however, the tip behaves more like a sphere for which a decline in the hardness proportional to \(\sqrt {h_{c} }\) is expected [19], resulting form a changing indentation strain. The hardness drop therefore is a physical effect of the tip rounding rather than an introduced artifact. Generally, the use of a sharper indenter results in higher hardness values [23, 24] and the reduction in measured hardness is consequently expected to increase with tip radius [21], i.e., the hardness should decrease with ongoing wear of the tip. The hardness decrease is absent in the case when the indentation area function is used for correction. For the reduced modulus, this decrease at low indentation depths is generally not expected but can also be observed for the direct imaging methods here, although it appears to be much smaller in this case. The reason for this is probably related to residual uncertainties of the imaging of the region around the tip apex that are not readily accounted for.
Nonetheless, the presented results on the evaluation of the mechanical properties suggest that the direct tip imaging is potentially superior compared to the more commonly performed indentation method. First, the hardness decrease at low indentation depth due to a decreased indentation strain resulting from a rounded tip can be observed. Furthermore, direct imaging allows to detect tip defects such as breakouts and scratches that are not readily visible from an indentation experiment. Also it does not depend on the depth-independent mechanical properties of a standard material which might only be known with a particular uncertainty. Although it can be argued that the effort is higher compared to the well-established indentation of fused silica, equipment capable of scanning a sample together with suitable evaluation scripts allow to evaluate the tip with a higher precision in less time and with less wear on the tip. However, not every imaging method is equally suitable and the recorded 3D data set needs to be critically assessed before it can be used for correction of tip blunting.
Conclusion
In this publication, we have assessed the suitability of several direct imaging methods (confocal laser scanning microscopy—CLSM, atomic force microscopy—AFM and self-imaging by scanning a sharp silicon spike with the indenter) for the determination of the area function of a Berkovich nanoindenter tip. A new evaluation method based on the fitting of the obtained 3D datasets using Python scripting is presented. The important tip characteristics such as the tip radius at the apex and equivalent cone angle were determined for all imaging methods using different approaches allowing to assess the applicability of each measurement. It can be seen that although all methods allow to image the tip in principle, there are important differences between the results. It was found that both CLSM and AFM showed artifacts which inhibited the determination of a suitable area function. In the CLSM case, no sharp image could be produced and the edges as well as the apex of the tip showed additional laser reflections especially when the image was recorded using a higher resolution. Even in the AFM measurement, inconsistencies of the results were obtained which are most likely correlated with the tapping mode operation of the AFM. Self-imaging on the other hand resulted in a sharp image and an area function was obtained that is preferable to the determination of the area function by the indentation of a reference material, as it allowed the observation of the hardness decrease at low indentation depth due to the rounding of the indenter tip. In conclusion, self-imaging provided the best results especially since the tip does not need to be removed from the indenter device. However, not all nanoindenter instruments are capable of using the tip directly as a scanning probe. In this case, the low-resolution CLSM measurement might be an alternative for comparatively large indentation depths above 150 nm where the artifacts around the tip apex were found to be negligible. It needs to be mentioned here that while we show the evaluation for a Berkovich tip, equivalent evaluation techniques can be just as well applied to other tip geometries such as cube corner tips, four-sided pyramidal Vickers tips, or sphero-conical tips.
Methodology
The Berkovich diamond tip acquired from Bruker was imaged using three different techniques: Confocal laser scanning microscopy (CLSM—Olympus 4100 OLS), atomic force microscopy (AFM—Asylum Research MFP-3D AFM), and self-imaging over spikes using the scanning probe microscopy (SPM) option of a Hysitron nanoindenter (Hysitron TriboIndenter TI950) were chosen for the different resolutions and availability in different labs. CLSM images were made using the low-resolution and high-resolution mode (pixels). The AFM image was made with tapping mode using a scan sizes of 10 × 10 µm2, utilizing AC 160 TS AFM Probes (Olympus Micro Cantilevers) with a nominal tip radius of curvature of 7 nm and atypical resonance frequency of 300 kHz. The scan resolution of 512 × 512 pixels is limited by the AFM tip radius and was chosen as the optimum between maximum resolution and minimization of noise. Self-imaging of the tip was accomplished on a TriboIndenter 950 (Bruker-Hysitron) utilizing a TGT1 spikes grid from NT-MDT. The spikes are made of silicon with a height of 0.3–0.7 µm, a radius of approximately 10 nm, and spacing of 3 µm (lateral) or 2.12 µm (diagonal). Scanning over the spikes was performed in the scanning probe microscopy image mode with a set point of 2–3 µN. The scan size was 2 × 2 µm, with an additional 5 × 5 µm image used to identify and center the indenter tip over a spike. Since the radius of the silicon spike is much smaller compared to the features of interest on the imaged Berkovich tip, no influence of the spike in terms of image dilation [25] is expected. The indentation experiment as well as the elastic indentation used for the determination of the tip radius assuming Hertzian theory was performed on a TS77 Select (Bruker-Hysitron).
The frame compliance correction was performed according to the manufacturer's protocols. A matrix of 25 indents spaced 10 µm apart with loads varying between 5 and 10 mN were made into fused silica. From these indents, the frame compliance was corrected before indenting for the area function calibration. The tip area function was created from 50 indents into fused silica and a 10 s load-10 s unload with loads between 100 µN and 10 mN.
The data evaluation was performed using custom made Python code which to a large extent employ the NumPy [26] and SciPy [27] packages. The determination of the depth-dependent cross-sectional area was performed using the “marching squares” algorithm, a special case of the “marching cubes” algorithm [28]. This algorithm is implemented by the find_contours function in the measure module of the scikit-image library [29]. Further, third party libraries that were used are matplotlib [30], shapely [31], PyQt5 [32], and pyqtgraph [33].
Data availability
The datasets generated during and/or analyzed during the current study are not publicly available, but are available from the corresponding author on reasonable request.
References
A.C. Fischer-Cripps, Nanoindentation, 2nd edn. (Springer, New York, 2004).
W.C. Oliver, G.M. Pharr, An improved technique for determining hardness and elastic modulus using load and displacement sensing indentation experiments. J. Mater. Res. 7(6), 1564 (1992)
W.C. Oliver, G.M. Pharr, Measurement of hardness and elastic modulus by instrumented indentation: advances in understanding and refinements to methodology. J. Mater. Res. 19(1), 3 (2004)
G.M. Pharr, A. Bolshakov, Understanding nanoindentation unloading curves. J. Mater. Res. 17(10), 2660 (2002)
J.-S. Park, Y.-H. Lee, Y. Kim, J.-H. Hahn, Prediction of bluntness for pyramidal indenters from nanoindentation curves. Surf. Coat. Technol. 211, 148 (2012)
J. Čech, P. Haušild, O. Kovářík, A. Materna, Examination of Berkovich indenter tip bluntness. Mater. Des. 109, 347 (2016)
M.R. VanLandingham, T.F. Juliano, M.J. Hagon, Measuring tip shape for instrumented indentation using atomic force microscopy. Meas. Sci. Technol. 16(11), 2173 (2005)
K. Herrmann, N.M. Jennett, W. Wegener, J. Meneve, K. Hasche, R. Seemann, Progress in determination of the area function of indenters used for nanoindentation. Thin Solid Films 377–378, 394 (2000)
J. McMinis, R. Crombez, E. Montalvo, W. Shen, Determination of the cross-sectional area of the indenter in nano-indentation tests. Phys. B 391(1), 118 (2007)
A.C. Barone, M. Salerno, N. Patra, D. Gastaldi, E. Bertarelli, D. Carnelli, P. Vena, Calibration issues for nanoindentation experiments: direct atomic force microscopy measurements and indirect methods. Microsc. Res. Techniq. 73(10), 996 (2010)
G. Aldrach-Smith, N.M. Bennett, U. Hangen, Direct measurement of nanoindentation area function by metrological AFM. Z. Metallkd. 96(11), 1267 (2005)
J.H. Choi, C.S. Korach, Tip bluntness transition measured with atomic force microscopy and the effect on hardness variation with depth in silicon dioxide nanoindentation. Int. J. Precis. Eng. Man. 12(2), 345 (2011)
T. Chudoba, N.M. Jennett, Higher accuracy analysis of instrumented indentation data obtained with pointed indenters. J. Phys. D Appl. Phys. 41(21), 215407 (2008)
ISO: Metallic materials—Instrumented Indentation Test for Hardness and Materials Parameters. Geneva, Switzerland, 2015.
J.C. Hay, A. Bolshakov, G.M. Pharr, A critical examination of the fundamental relations used in the analysis of nanoindentation data. J. Mater. Res. 14(6), 2296 (1999)
W.J. Zong, D. Wu, C.L. He, Radius and angle determination of diamond Berkovich indenter. Measurement 104, 243 (2017)
A.S. Useinov, K.S. Kravchuk, A.A. Rusakov, I.V. Krasnogorov, A.P. Kuznetsov, T.V. Kazieva, Indenter shape characterization for the nanoindentation measurement of nanostructured and other types of materials. Phys. Proc. 72, 194 (2015)
D.J. Munoz-Paniagua, M.T. McDermott, P.R. Norton, S.M. Tadayyon, Direct tip shape determination of a Berkovich indenter: effect on nanomechanical property measurement and description of a worn indenter. IEEE Trans. Nanotechnol. 9(4), 487 (2010)
K. Ikezawa, T. Maruyama, Sharp tip geometry and its effect on hardness in nanoindentation experiments. J. Appl. Phys. 91(12), 9689 (2002)
J. Woirgard, C. Tromas, J.C. Girard, V. Audurier, Study of the mechanical properties of ceramic materials by the nanoindentation technique. J. Eur. Ceram. Soc. 18(15), 2297 (1998)
C.-J. Lu, D.B. Bogy, The effect of tip radius on nano-indentation hardness tests. Int. J. Solids Struct. 32(12), 1759 (1995)
A.C. Fischer-Cripps, The sharpness of a Berkovich indenter. J. Mater. Res. 25(5), 927 (2010)
F. Zhang, Y. Huang, K.-C. Hwang, The indenter tip radius effect in micro- and nanoindentation hardness experiments. Acta Mech. Sinica 22(1), 1 (2006)
Y. Wang, Effects of indenter angle and friction on the mechanical properties of film materials. Results Phys. 6, 509 (2016)
J.S. Villarrubia, Algorithms for scanned probe microscope image simulation, surface reconstruction, and tip estimation. J. Res. Natl. Inst. Standard Technol. 102(4), 425 (1997)
S. van der Walt, S.C. Colbert, G. Varoquaux, The NumPy array: a structure for efficient numerical computation. Comput. Sci. Eng. 13(2), 22 (2011)
P. Virtanen, R. Gommers, T.E. Oliphant, M. Haberland, T. Reddy, D. Cournapeau, E. Burovski, P. Peterson, W. Weckesser, J. Bright, S.J. van der Walt, M. Brett, J. Wilson, K.J. Millman, N. Mayorov, A.R.J. Nelson, E. Jones, R. Kern, E. Larson, C.J. Carey, İ Polat, Y. Feng, E.W. Moore, J. VanderPlas, D. Laxalde, J. Perktold, R. Cimrman, I. Henriksen, E.A. Quintero, C.R. Harris, A.M. Archibald, A.H. Ribeiro, F. Pedregosa, P. van Mulbregt, SciPy 10: fundamental algorithms for scientific computing in Python. Nat. Methods 17(3), 261 (2020)
W.E. Lorensen, H.E. Cline, Marching cubes: a high resolution 3D surface construction algorithm. Comput. Graphics 21(4), 163 (1987)
S. van der Walt, J.L. Schönberger, J. Nunez-Iglesias, F. Boulogne, J.D. Warner, N. Yager, E. Gouillart, T. Yu, scikit-image: image processing in Python. PeerJ 2, 453 (2014)
J.D. Hunter, Matplotlib: A 2D graphics environment. Comput. Sci. Eng. 9(3), 90 (2007)
shapely. https://github.com/Toblerity/Shapely. Accessed 27 Aug 2020
PyQt5. https://riverbankcomputing.com/software/pyqt. Accessed 27 Aug 2020
pyqtgraph. http://www.pyqtgraph.org. Accessed 27 Aug 2020
Acknowledgments
The financial support by the Austrian Federal Ministry for Digital and Economic Affairs and the National Foundation for Research, Technology, and Development is gratefully acknowledged. We would like to thank Ceratizit Austria GmbH for providing access to the Hysitron TI950 indenter. C. Teichert is gratefully acknowledged for the use of the AFM facilities of the Institute of Physics of the Montanuniversität Leoben.
Funding
Open Access funding provided by Montanuniversität Leoben. Funding was provided by Christian Doppler Forschungsgesellschaft.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Rights and permissions
Open access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Saringer, C., Tkadletz, M., Kratzer, M. et al. Direct determination of the area function for nanoindentation experiments. Journal of Materials Research 36, 2154–2165 (2021). https://doi.org/10.1557/s43578-021-00113-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1557/s43578-021-00113-9