
Abstract
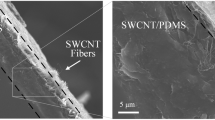
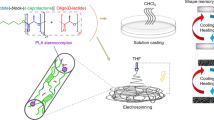
Electrothermal actuators (ETAs) have been the focus of continuous R&D in targeting soft actuator applications. This article explores both the fabrication and design characteristics of a poly(dimethylsiloxane) (PDMS) elastomer—carbon nanotube buckypaper layered composite in the dual cantilever bending arrangement. Actuation characterization tests demonstrate the relationship between actuator geometries, boundary conditions, and heating rate to the maximum bending deflection. SEM observations on the cross sections of the ETAs fabricated with different conductive layers display the variations in thickness, and the effects of localized heating zones are discussed. By comparing different fabrication methods, improvements to the actuation features through ETA design modification were reported, and the possibility to greatly increase the actuation was displayed. The potential of ETAs as surface morphing actuators is demonstrated in concept through fabrication of a single sheet array consisting of multiple ETAs with the ETA segments individually and simultaneously activating to create hill-like features.
Impact statement
Exploring the fabrication of novel soft robotic actuators shows great promise in creating devices that are lightweight, flexible, and multifunctional. These actuators can provide a unique alternative to conventional mechanical solutions. For example, as lightweight and low-profile surface actuators where conventional mechanical actuators are too bulky. This article discusses an investigation of the bending deformation of various designs of electrothermal actuators and the various factors that influence the actuation performance such as geometry, electrical conductivity, and actuator fabrication methods. To better understand the behavior, several characterization tests and various fabrication methods are demonstrated. The aim is to investigate and understand the fundamental factors that influence the deformation of electrothermal actuators and develop a shape conformable array of actuators for shape-morphing applications. The overall performance of the developed actuators shows great promise for improving soft robotics systems.
Graphical abstract






Similar content being viewed by others

Data availability
The data sets generated and analyzed during the current study are available from the corresponding author on reasonable request.
References
A. Potekhina, C. Wang, Actuators 8(4), 69 (2019). https://doi.org/10.3390/act8040069
Y. Hao, S. Zhang, B. Fang, F. Sun, H. Liu, H. Li, Chinese J. Mech. Eng. 35, 37 (2022). https://doi.org/10.1186/s10033-022-00707-2
P. Won, K.K. Kim, H. Kim, J.J. Park, I. Ha, J. Shin, J. Jung, H. Cho, J. Kwon, H. Lee, S.H. Ko, Adv. Mater. 33(19), 2002397 (2021)
M. Mrinalini, S. Prasanthkumar, ChemPlusChem 84(8), 1103 (2019)
H.S. Tzou, H.J. Lee, S.M. Arnold, Mech. Adv. Mater. Struct. 11(4–5), 367 (2004)
S. Kim, C. Laschi, B. Trimmer, Trends Biotechnol. 31(5), 287 (2013)
R. Yin, B. Yang, X. Ding, S. Liu, W. Zeng, J. Li, S. Yang, X. Tao, Adv. Mater. Technol. 5(8), 2000441 (2020). https://doi.org/10.1002/admt.202000341
Z. Zhang, Y. Li, X. Yu, X. Li, H. Wu, H. Wu, S. Jiang, G. Chai, Thin-Walled Struct. 142, 74 (2019)
A.C. Henry, G. Molinari, J.R. Rivas-Padilla, A.F. Arrieta, AIAA J. 57(6), 2384 (2019)
S. Shian, K. Bertoldi, D.R. Clarke, Adv. Mater. 27(43), 6814 (2015)
S.K. Mitchell, X. Wang, E. Acome, T. Martin, K. Ly, N. Kellaris, V.G. Venkata, C. Keplinger, Adv. Sci. 6(14), 1900178 (2019). https://doi.org/10.1002/advs.201900178
M.E.M. Salem, Q. Wang, Eng. Res. Express 4(1), 015001 (2022)
O. Kim, S.J. Kim, M.J. Park, Chem. Commun. 54(39), 4895 (2018)
D. Mao, F. Hu, Z. Yi, Kenry, S. Xu, S. Yan, Z. Luo, W. Wu, Z. Wang, D. Kong, X. Liu, B. Liu, Sci. Adv. 6(26), eabb2712 (2020)
M. Bashir, P. Rajendran, J. Intell. Mater. Syst. Struct. 29(19), 3681 (2018)
Y. Bar-Cohen, I.A. Anderson, Mech. Soft Mater. 1, 5 (2019). https://doi.org/10.1007/s42558-019-0005-1
L. Chen, M. Weng, Z. Zhou, Y. Zhou, L. Zhang, J. Li, Z. Huang, W. Zhang, C. Liu, S. Fan, ACS Nano 9(12), 12189 (2015)
Q. Li, C. Liu, Y.H. Lin, L. Liu, K. Jiang, S. Fan, ACS Nano 9(1), 409 (2015)
S. Yao, J. Cui, Z. Cui, Y. Zhu, Nanoscale 9(11), 3797 (2017)
P.J. Cottinet, C. Souders, S.Y. Tsai, R. Liang, B. Wang, C. Zhang, Phys. Lett. A 376(12–13), 1132 (2012)
I.A. Rousseau, Polym. Eng. Sci. 48(11), 2075 (2008)
Y. Yang, Y. Wu, C. Li, X. Yang, W. Chen, Adv. Intell. Syst. 2(1), 1900077 (2020)
Q. Li, C. Liu, S. Fan, Nanotechnology 29(17), 175503 (2018)
G. Tibi, E. Sachyani Keneth, M. Layani, S. Magdassi, A. Degani, Soft Robot. 7(5), 649 (2020)
Y. Tian, Y. Li, Q. Wang, H. Tian, X. Geng, Y. Zhi, Y. Wei, Y. Yang, T. Ren, “A Soft Electrothermal Actuator with Large Deformation and High Periodic Deformation Speed,” 2020 21st International Conference on Electronic Packaging Technology (ICEPT 2020) (IEEE, Guangzhou, August 12–15, 2020), pp. 1–4
Z. Zhou, Q. Li, L. Chen, C. Liu, S. Fan, J. Mater. Chem. B 4(7), 1228 (2016)
Z. Li, Z. Liang, Sci. Rep. 7, 42423 (2017). https://doi.org/10.1038/srep42423
Y. Jang, S.M. Kim, G.M. Spinks, S.J. Kim, Adv. Mater. 32(5), 1902670 (2020)
L. Xue, W. Wang, Y. Guo, G. Liu, P. Wan, Sens. Actuators B Chem. 244, 47 (2017)
S.A. Meguid, G.J. Weng, Micromechanics and Nanomechanics of Composite Solids (Springer, New York, 2017)
J.N. Coleman, U. Khan, W.J. Blau, Y.K. Gun’ko, Carbon 44(9), 1624 (2006)
R.I. Rubel, M.H. Ali, M.A. Jafor, M.M. Alam, AIMS Mater. Sci. 6(5), 756 (2019)
B. Ribeiro, J.A.R. Corredor, L. Ardila, L.F.P. Santos, M.L. Costa, M.C. Rezende, E.C. Botelho, J. Appl. Polym. Sci. 137(5), 48330 (2020)
J. Ahn, Y. Jeong, Z.-J. Zhao, S. Hwang, K. Kim, J. Ko, S. Jeon, J. Park, H. Kang, J.-H. Jeong, I. Park, Adv. Mater. Technol. 5, 1900997 (2020). https://doi.org/10.1002/admt.201900997
Y. Martinez-Rubi, B. Ashrafi, M.B. Jakubinek, S. Zou, K. Laqua, M. Barnes, B. Simard, ACS Appl. Mater. Interfaces 9(36), 30840 (2017)
W. Sang, L. Zhao, R. Tang, Y. Wu, C. Zhu, J. Liu, Macromol. Mater. Eng. 302(12), 1700239 (2017)
Y. Cao, J. Dong, Procedia Manuf. 48, 43 (2020)
Q. Fan, J. Miao, M. Tian, H. Zhao, S. Zhu, X. Liu, Y. Ma, L. Qu, Sens. Actuators A Phys. 315, 112352 (2020)
Y.-C. Sun, B.D. Leaker, J.E. Lee, R. Nam, H.E. Naguib, Sci. Rep. 9(1), 11445 (2019)
E. Hajiesmaili, D.R. Clarke, Nat. Commun. 10(1), 10 (2019)
M. Liu, J. Sun, Q. Chen, Sens. Actuators A Phys. 151(1), 42 (2009)
J.M. Gere, Mechanics of Materials, 6th edn. (Thomson-Engineering, Belmont, 2006)
A. Asghar, S. Sidhu, W.D.E. Allan, G. Ingram, T.M. Hickling, R. Stowe, “Investigation of a Passive Flow Control Device in an S-Duct Inlet of a Propulsion System with High Subsonic Flow,” in Proceedings of the ASME Turbo Expo 2018: Turbomachinery Technical Conference and Exposition. Volume 1: Aircraft Engine; Fans and Blowers; Marine (Oslo, 2018), pp. 1–18
Acknowledgments
The authors would like to acknowledge the financial support from the Natural Sciences and Engineering Research Council (NSERC) and from the National Research Council Canada (NRC), as well as discussions with W. Chishty (NRC) and A. Asghar (Royal Military College of Canada) for the duct model geometry.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Nam, R., Lee, J.E., Jakubinek, M. et al. Soft electrothermal actuator array for surface morphing application. MRS Bulletin 48, 819–827 (2023). https://doi.org/10.1557/s43577-022-00474-4
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1557/s43577-022-00474-4