
Abstract
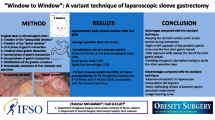
Establishment of inflow control and gentle effective retraction of the liver for optimal exposure are critical to safe hepatectomy. Multiple methods have been previously reported for inflow control in minimally invasive (MIS) hepatectomy including Huang’s Loop.1,2,3 We describe here the assembly and use of our modified version of Huang’s loop that permits adjustable, atraumatic, and totally intracorporeal inflow control. We use a soft 16-French urinary catheter with a single premade opening near the blunt tip, across which a small slit is created. A beveled cut is made to the catheter 12–15 cm from the blunt tip and a suture sewn there that can be grasped to pull this beveled tail through the slit and window around the porta hepatis; this loop can be tightened or loosened with ease. For liver retraction, current techniques can be traumatic, especially when instruments apply traction directly onto the liver.4 Our preferred approach utilizes a liver sling made from a soft, rolled surgical sponge with 15-cm silk ties secured at each end; the length of the sling can be adjusted on the basis of thickness of the liver. The sling applies gentle, atraumatic “pulling” traction and is especially useful for exposure of the right posterior sector. We also use external band retraction to align the transection plane with the camera.5 Both also provide countertraction when advancing instruments into a firm or fibrotic liver. These techniques are commonly used in our MIS practice, and we have found them to be cost-efficient, easily reproducible, and effective.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
Huang JW, Su WL, Wang SN. Alternative laparoscopic intracorporeal Pringle maneuver by Huang’s loop. World J Surg. 2018;42(10):3312–5.
Mownah OA, Aroori S. The Pringle maneuver in the modern era: a review of techniques for hepatic inflow occlusion in minimally invasive liver resection. Ann Hepatobiliary Pancreat Surg. 2023;27(2):131–40.
White MG, et al. Robotic partial segment VIII resection. Ann Surg Oncol. 2021;28(3):1513–1513.
Giulianotti PC, et al. Robotic liver surgery: technical aspects and review of the literature. Hepatobiliary Surg Nutr. 2016;5(4):311–21.
Newton AD, et al. Robotic extended right hepatectomy for colorectal liver metastasis. Ann Surg Oncol. 2022;29(13):8455–8455.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Disclosure
Dr. Tran Cao is the recipient of a research grant from Intuitive Foundation.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was presented as a video abstract at the Americas-Hepato-Pancreato-Biliary Association (AHPBA) 2023 meeting, which took place March 9–12 in Miami Beach, FL.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file1 (MP4 238050 KB)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Jain, A.J., Newhook, T.E., Lilley, E. et al. A Practical Guide to Inflow Control, Retraction, and Exposure for Robotic Hepatectomy. Ann Surg Oncol 31, 1833 (2024). https://doi.org/10.1245/s10434-023-14593-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1245/s10434-023-14593-y