
Abstract
Background
In Camponotus sericeus (Fabricius), foraging ants are recruited mostly as individuals but occasionally as small groups that move in a single file. We studied the structure and organization of these small foraging groups and attempted to understand the process through which the cohesiveness of the moving file is maintained.
Results
The recruited group moves in a single file as if steered by a leader at the moving tip. Ants in the group were found to exhibit certain fidelity to their respective positions in the file, despite the occasional breakdown of the cohesiveness due to disturbance and or obstructions on their path. This fidelity decreases from both ends towards the middle part of the file. Accordingly, three segments could be recognized in the moving file: (a) the leading ant that almost always maintains its position and steers the group, (b) a short tail part with a few ants that always trail the file and, (c) the mid part that binds the group; ants in this segment always tend to follow the leader through a cascading chain of tactile communication. If the leader ant is removed, entire group loses its orientation and enters into a chaotic search state. But removing any other ant does not affect the cohesiveness; rather it’s position is occupied by the member preceding it and thus maintains the link in the group.
Conclusions
The cohesiveness of the moving group appeared to result from (a) regulation of the movement of the group by the leading ant, and, (b) an interactive process among the rest of the ants. Based on these two elements, a simple automated model of the group’s movement was developed that could effectively mimic the observed pattern. We also provide evidence to suggest that recruitment of groups occurs in the direction of, and in response to, the information received by the colony on, the resource rich patches.
Similar content being viewed by others


Background
Ants forage in groups of varying sizes ranging from solitary to tandem foragers, to small groups, to trail forming mass foragers, and to army riders [2, 11, 14, 18]. It has been argued [4, 17] and shown that the size of the foraging team is a function of the size of the ant colony [2, 20]. Such increase in size of the foraging team with colony size is attributed to the increasing complexity of acquiring, integrating and processing the information among foragers in large colonies [2, 4, 6, 17]. In small colonies with a few ants, information can be easily exchanged, integrated and processed among foragers to arrive at an appropriate decision. Foragers of small colonies are therefore capable of making independent decisions and forage solitarily. On the other hand, in very large colonies with several hundreds to thousands of ants, members are continuously flooded with vast information from a large set of foragers. As a result, ants in large colonies find it difficult to effectively integrate and process the information on their own to arrive at appropriate decisions [2, 4, 6, 9, 17, 19]. Therefore, large colonies adopt more or less a self-organized process of recruitment where behavior of the foragers is shaped by (i) a set of simple rules and (ii) the feedback they derive while interacting with other colony members [6,7,8]. Such self-organized behavior of ants in large colonies mediated often by chemicals ([6, 7];) or steered by behavioral interactions along trails [15] results in a collective intelligence [3, 10] and an enmass recruitment of foragers. Thus, while small colonies recruit solitary foragers, in large colonies, en mass foragers are recruited through a self-organized process.
However, the critical size of the colony and, the specific drivers, which trigger the shift from solitary to group and mass recruitment, is not yet well understood. Answer perhaps lies in understanding and dissecting the recruitment patterns adopted by medium size ant colonies where a mix of these strategies co-exist [2]. It has been shown that medium-sized ant colonies adopt a mixed strategy where a proportion of ants forage solitarily while others are recruited in small groups [2, 18]. Studying the frequency, recruitment patterns, and organization of these small groups may be critical for analyzing the reasons for the shift from solitary to group foraging.
Towards this, we studied the patterns of recruitment and organization of group foragers in an ant species Camponotus sericeus (Fabricius), that exhibits a mixed strategy of recruitment. We show that, unlike in other group or mass foraging ants, small foraging groups of this species behave as independent units with a discrete structure that is locally regulated rather than being completely self-organized.
Results
Activity profile
Ants of Camponotus sericeus foraged from 6:00 AM to 6:00 PM but were most active during 9:00 AM- 12:00 AM and ants returning to the nest with food also peaked immediately following midday (Fig. 1a and b). There was another but a less active phase during late afternoon around 3:00 PM. We focused most of our study during the morning peak period of activity. We do not have detailed data on the distances to which foraging ants venture out in search of food; but the limited observations indicated that while some foragers return from 10 m, some travel even up 50 m from the nest.

a Average number of ants active per colony. Values are from four colonies observed randomly for 10 min windows at 1 h intervals over 5 days every from morning 6:00 to evening 6:00 (18:00). The solid line with filled circles: Total number of ants active; solid line with small squares: Ants going out of the nest; dotted line with squares: Ants coming to the nest without food; solid line with triangles: ants coming to the nest with food. b Percent ants carrying food to the nest were found to peak mostly during the mid day;there was a spurt towards the end of the day
Recruitment pattern
Camponotus sericeus, colonies forage mostly by recruiting solitary foragers. But occasionally, in about 0.08% of the recruitments, groups of 5–14 ants (mean = 10.63 + 3.46 (SD); n = 8 foraging groups) were also recruited. These groups move almost always in a single file, with an average of about 1–2 ant distances between the foragers. On reaching the foraging area, the group gets disintegrated, and its members forage and return to the nest on their own as solitary foragers.
Structural organization and movement of the group
Ants of the group moved one behind the other, in tandem, as if they maintained a hierarchy along the file and it appeared that a leader in the moving tip of the file almost always steered the entire group towards a defined foraging target. The followers seemed to maintain the file through a regular physical contact with those ahead and behind akin to tandem running ants [13]. Nevertheless, during their swift and active movement, as if purely by chance than by design, ants did shift their positions though very occasionally. Further, due to disturbances or hindrances on their path, some ants often loose contact with the rest of the group, and stray away. But such ants immediately exhibited distress activity and moved vigorously in increasingly wider arcs around the point of last contact, in an attempt to locate the group. They generally establish contact with the group within a few seconds, mostly through tactile senses, join the file almost at or about their original position and resume their normal speed. Strangely, when an ant gets strayed away, other ants never seemed to take notice of, nor bothered to wait for the missing member of the group; rather they kept moving unperturbed trying to establish contact with the remaining ants ahead of them. In fact, the leader generally maintained its own bearing and moved straight towards the foraging area as if the target area and hence the direction of movement is pre-decided (akin to that reported for tandem running by [13])). For this reason, the leader never strayed away from the file and the ants immediately behind it were less likely to lose their path. In this sense, cohesiveness and communication among the members of the group gradually tapered from the leading edge towards the trailing end; ants in the middle and trailing section were more likely to be strayed away from the path than those in the anterior moving tip. Based on these observations we could identify three parts of the group viz., the leader, the tail part and the middle body of the moving group.
Positional fidelity of ants in the group
If ants in a group, do not have any fidelity to their positions, and occupy randomly any position along the file, then each of them has an equal probability of occurring at all the positions. Thus all the ants in a group of size N, are expected to occur at all the positions such that their mean position hovers around N/2. But the data showed otherwise (Fig. 2a). Each ant occupied a discrete position in the group with their mean positions ranging from almost 1 to N along their rank positions (ranks derived from their mean positions). Ants showed very little variation in their positions (implied from Fig. 2b). In other words, the average position occupied by them did not hover around N/2, rather ranged widely and was almost equal to the number of ants in the group (Fig. 2a). This is also clear from the combined analysis of all the five segments (Fig. 2b). The mean position of the ants increased along the segments from leading tip (segment 1) to the tail (segment 5). Note that each segment has ants from all the eight sampled groups separated in to these five segments. For example, a group with only five ants will contribute only one ant to each segment while a group with 14 ants contributes about 3 ants to each segment. Clearly, such segment-based analysis also shows that the ants tend to maintain their positions.

a Mean position of the ants against the rank order of the position in the group. For clarity, the data for only four groups is presented that varied in their size from 5 ants to 14 ants. Solid line triangles: 13 ants; solid line, squares: 14 ants; dotted line, circles: 5 ants; dashed line squared: 9 ants. b Average positions occupied by ants in five different segments (from leading edge =1 to tail =5) of the groups; bars indicate the SD for the positions occupied by ants in a segment (n = 8 groups)
Further, the extent to which they shifted from their respective positions (referenced to `0′) during the trip was very less compared to the possible range (Fig. 3a). For instance, in a group of eight ants, about 48% of the times, all the ants were found in their respective positions (0), and in 80% of observation events, they were restricted to within one step on either side of their respective positions (− 1, 0 and + 1; Fig. 3b). Further, though the maximum number of steps that the ants could have shifted is 7 (+ 7 for tail ants and − 7 for leading ant), they never drifted that far; their shift was restricted + 4 or − 3 steps and that too very rarely. In other words, most often, ants maintained their respective positions (0) and their movement is restricted mostly to one step (80%) and rarely to two (95%) or three steps (inset of Fig. 3b).

a Extent to which the ants jump from their respective positions (0) in forward (positive steps) or backward (negative steps) directions. For clarity, data is presented only for one group of eight ants and that too, for the ants at only four positions viz., position 1 (leading ant, solid black bars), position 3 (Open bars), position 5 (light shaded bars), and position 8 (tail ant, dark shaded bar). Note that the leading ant is almost always at it’s leading position except in about 5% of observation events when it has moved back by a single step. b Average frequencies of jumps for ants in a group of eight ants from their respective positions (0) in forward (positive steps) or backward (negative steps) directions. This graph has data pooled for all the eight ants unlike in Fig. 3a where only four of the eight ants are represented. c Standard deviation for the number of steps jumped by the ants at different positions in the group with eight ants
The leading ant shifted the least from its position (Fig. 3a for a group of eight ants). This pattern was true for groups of varying sizes; for instance, in a group of ten ants, the leading ant remained in its position in about 97% of the observation events. Similarly the tail ant also showed a high fidelity to its position; it remained in its position (10th) 60% observations and shifted to 9th position in 38% observations (data not given; but see a similar pattern for the tail ant in Fig. 3a). On the other hand, ants at other positions showed relatively less fidelity. While they also appeared to retain their positions, they did move relatively more frequently to the neighboring positions than the leader and the tail ants (Fig. 3a and b). Such differential positional fidelity was also clear from the variance of the positions occupied by the ants (Fig. 3c). The leading ant exhibited least variation, while the ants in the middle had high variance for the positions they occupied; the tail ants were relatively more stable than the ants in the middle. This pattern remained so for groups of all sizes (data not given). Thus, there appears to be a non-linear pattern in the positional fidelity of ants: fidelity decreases from either end towards the middle of the group and this pattern was seen for all the groups analyzed.
Role of ants in different positions
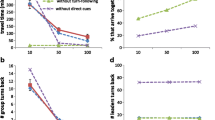
When the leader ant was removed, the entire group was found to be highly disturbed and all the ants entered in to a hectic, vigorous search mode with widening arcs in their movement paths. As a result, the cohesiveness of the group was lost as indicated by the significant increase in the mean distance between the nearest ants (d); this distance increased significantly from the undisturbed control groups (d = 2.09 + 1.90 (SD) ant units; n = 50) to the group without the leader (d = 11.43 + 5.89 (SD) ant units; n = 28; t-test =10.30; p < 0.001). However, when the leader ant was re-introduced even amidst such chaotic, disorganized group, ants immediately began to converge towards it reducing the distance between ants. The leader ant immediately started moving towards the foraging direction, and rest of the ants tended to organize themselves in a file behind it and moved as usual. Consequently, within a couple of minutes the inter-ant distance between any nearest pair of ants reduced significantly to a lower level (d = 3.81 + 2.11 ant units; n = 22; t-test =5.76; p < 0.001)) to the level almost to that of the control group (Fig. 4). Thus, the members of the group appear to be steered by the leader whose presence holds entire group cohesively. Its disappearance creates chaos or instability in the group. The rapidity with which the dis-organized group gets re-assembled with the re-introduction of the leader seems to suggest the possibility of a chemical cue involved from the leader though we do not have evidence of it.

Average ant unit distance (d) between the nearest ants in the undisturbed group (Control; open bar), when the ant was removed (Minus ant), and 2 min after its re-introduction (Plus ant). Solid black bars: ant removed from mid group; Shaded bars: Leader ant removed. The vertical bars are the SD values
Unlike with the leader ant, the removal of the ants from the middle or tail part, did not affect the cohesiveness of the group; the distance between the nearest ants remained low (d = 1.7 + 0.96 ant units; n = 24; have pooled the data for tail and mid parts as these treatments had no effect) and did not differ significantly from the control group (d = 2.09 + 1.90 (SD) ant units; n = 50); also, when these ants were re-introduced, the distance remained unchanged (1.9 + 0.51 ant units; n = 24; Fig. 4). Thus when ants from the middle or tail part of the group are removed, the group’s cohesiveness was not altered suggesting that role of these ants in maintaining the cohesiveness is more passive.
Foraging area covered by individuals and group foragers
In one particular nest for which the direction of recruitment of solitary foragers was recorded over a 2 day period, though recruitment appeared to be widely distributed around the nest, their vector was a concentrated towards northeast (α = 35.210 from the North; SD = 78.50; r = 0.388; Watson test, (U2 = 0.576; p < 0.05 [1]). This may be because in that direction, about 10–12 m away from the nest, there was a patch of trees with good canopy cover, and, litter under them harbored small insects and termites (visual observation; data on insect density not available). In fact, foraging groups also travelled up to this area in a single file but dispersed there. Later, such dispersed members of the group, foraged and returned to the nest independently as solitary foragers. We tracked one group of 10 ants that reached this patch and found that, the members spread out such that the width of the area of their spread (perpendicular to the line drawn from the nest) formed an angle of ~ 250 at the mouth of the nest. We compared this angle with the mean spread of a set of equal number of randomly chosen solitary foragers (n = 10 ants). For this, we randomly picked the angles of ten solitarily recruited ants, from the observed pool of 65 angles, by replacing the selected angle every time, and computed circular SD for their angles. This process was repeated about 100 times to arrive at 100 SDs. We found that only about 15% of such computed SDs were lesser than ~ 250, i.e., the angle that the group foragers formed after dispersing at the foraging area. This suggests that the members recruited in a group forage with in a highly focused or restricted area than the equal number of randomly chosen, solitarily recruited ants. In other words, group recruitment seems to be a strategy adopted by the colony when a rich food patch is located in a small area encouraging recruitment of several ants in that direction.
Synthesizing the group movement
Our results indicate that in Camponotus sericeus, the foraging groups recruited have a definite structural organization characterized by the following elements:
Differential fidelity of ants to their positions in the group
Ants in the centre of the group have more opportunities to move both forward and backward, while those at the tip can move only backwards and those in the tail can move only forward. This inevitably creates differential `opportunity range’ for the ants at different positions along the file which per se may result in differential fidelity among them: ants in the middle are more likely to shift their position than those at the leading edge or the tail.
Differential preference for their positions
Beyond the differential opportunities for ants to shift their positions (as indicated above) they also seem to have a certain memory of their respective positions such that the `opportunity range’ available for their movement is not completely realized or exhibited by them. For instance, though ants in the middle have opportunity to move to extreme ends, data showed that they do not. Similarly, the leading ant restricts itself only to the first two positions and the tail ants also exhibit highly constrained movement in to just a few positions in front of them. In other words, ants exhibit a preference to remain in their positions though the extent to which they shift their positions is a function of their placement in the file: middle ants shift more steps (in either direction) than those in the tip or tail.
We simulated the movement of a group of 10 ants, considering these two elements in each iteration. The probability (P) that an ant shifts its position at any given step (equated to one step movement of the file or group) was assumed to decrease inversely with its position from either of the ends of the group and is given by
where `K′ is the constant that defines the positional fidelity of ants at the two ends of the group and, `S′ is the position of the ant from the moving end or tail end towards the center. Assuming K = 1 (and this did not matter for the pattern), probabilities were assigned to each ant at each step and the ant that changes position was chosen stochastically.
Once an ant that is likely to shift the position was chosen, the chance that it shifts a given number of steps was decided conditionally. For any ant chosen, except the leader, it could have three alternatives: (i) it remains in its original position (with a probability of P0 = 0.50), (ii) it moves one step ahead or backwards (with P1 = 0.20 in each direction) or (iii) it shifts two steps ahead or back (with a P2 = 0.05 each). For the leader, P0 was considered 0.9, and P1 = 0.10 for only back word movement. Though these values appear to be arbitrary, they are based on the observed pattern of shifts. Movement of the group was thus simulated one step in each iteration until a total of 50 shifts were recorded in any direction among all the ants. Once 50 shifts occurred the simulation was terminated. In ten such simulations, we found that ants generally do not change their position in every iteration owing to the fidelity values assigned. Rather, shift occurred in about 5–10 iterations or movement steps. However, positions of ants were captured at each iteration for further analysis.
Results of the movement emerging from one such simulation were compared with that from the observed group movement, based on the extent and variance of shifts in the ant positions (Fig. 5a, b and c). It was found that the simulation reflected the natural process almost perfectly (compare with Fig. 3a, b and c) except for the highly stable positions imposed in the simulations on the leading and tail ants. Owing to such imposed stability for the two extreme ants, they did not show any variation (Fig. 5a and c). But the overall pattern of shifts of all ants was similar (Fig. 5b) with that of the observed groups (Fig. 3b).

a Extent to which the simulated ants shifted to different positions from their respective positions (0) in forward (positive steps) or backward (negative steps) directions. Graph shows the jumps for the leading ant (dark solid bar), for the ant at position 5 (shaded bar), at position 7 (Open bar) and the tail ant (open bar with thick border), b Average frequencies of jumps for simulated ants from their respective positions (0) in forward (positive steps) or backward (negative steps) directions. This graph has data pooled for all the ten ants unlike in Fig. 5a where only four of the ten ants are represented. c Standard deviation for the number of steps jumped by the ants at different positions in the group in the simulated group movement
Discussion
Our study suggests that, foraging group in Camponotus sericeus is highly structured and organized and, moves as a single unit guided by the leading ant that steers the members towards a predetermined target area just as the leader in the tandem foraging ants of Temnothorax albipennis [13]. The cohesiveness of the group is maintained through a continuous, tactile process that seems to flow in a cascading pattern from the leading ant such that all the ants in the group generally occupy a pre-decided positions. However, behavior of ants when the leader was removed, and reintroduced, suggests that chemical signal by the leading ant cannot be ruled out especially when the tactile communication is disrupted. But in general, all members of the group seem to maintain their order in the file through tactile communication. When any ant in the foraging unit is missing (other than the leader), others preceding it continue to catch up with that ahead of the missing ant in the file. The ant that strays away resorts to more active, wide-angled searches till it finds the group, and joins mostly in its original position.
Mass foraging, in general, is shown to be consequence of a self-organized feedback process where ants behave and interact based on certain simple rules [5, 7, 16]. For instance, blind ants of Linepithema humile (Earlier called as Iridiomyrmex humilis) forage in trails that follow the most optimal paths (shortest) by merely following two simple rules: each ant lays a unit of pheromone as it moves and prefers the path most travelled (as indicated by high levels of pheromone) among the alternate paths available [5, 7]. Such a process does not depend on any central regulator to guide the activity of hundreds and thousands of ants. However, the foraging group in Camponotus sericeus appears to follow a mixed mode: There is a local regulator, the leader, that steers the group, but the remaining ants seem do adopt a simple rule that maintains the cohesiveness of the group: each ant `blindly’ follows the ant ahead through a tactile communication. Such combined strategy where a regulator and the interaction among the ants shape the group activity appears to be an intermediate step towards the emergence of an auto-regulated feedback process of mass foraging ants. In fact, as shown by Beckers et al. [2], an auto-regulated or self organized strategy is more frequent in large colonies while the individual foragers that behave on their own are common in small colonies. Camponotus sericeus colonies are moderate in size with about few hundreds of ants and adopt the mixed strategy.
Our study did not establish clearly the conditions that facilitate the recruitment of groups over the solitary foragers; but the angle of the spread covered by the dispersed members of the group at the foraging area, shows that they focus their search in a relatively narrow space than the spread shown by equal number of ants recruited solitarily. Thus it is not unlikely that group recruitment is in response to the information received at the colony on the availability of resource-rich patches. Recruitment of foragers in proportion to the quality of the resource patch is shown in other ants as well [12, 14]. It is also likely that the frequency of recruitment and the size of the group recruited, depend on the information received at the nest. Nevertheless, as the colony size increases, the frequency of finding resource-rich patches also increases, and an integration of such information may drive en mass recruitment in large colonies- a pattern shown by Beckers et al. [2]. Thus dissecting the patterns of, and conditions that facilitate, the group recruitment in colonies such as Camponotus sericeus may help in understanding the emergence of mass recruitment in large colonies from solitary recruitment in small colonies.
Conclusions
In Camponotussericeus, ants are recruited both as solitary foragers and as small groups of 5–14 ants. These groups have a defined elements: a leading ant and the followers. While the leader directs the group to a predetermined foraging patch, the followers maintain the cohesiveness through tactile process as found in tandem foragers. The positions of the ants in the group is maintained till they reach the foraging area. At the foraging area, they disperse and behave just as solitary foragers. The study also showed that groups are recruited instead of solitary foragers probably in response to the information received on rich resource patches. Thus the shift in the foraging strategy from solitary to group appears to be, besides others, a function of the resource availability; rich patches that demand a cooperative foraging drive the recruitment of groups. Since the probability of large colonies encountering rich patches is higher, recruitment may inevitably be en masse - a pattern established by a large set of data by Beckers et al. [2].
Methods
Six colonies of the ant species Camponotus sericeus (Fabricius), were located during 2017, in the dry areas of GKVK Campus, University of Agricultural Sciences, Bengaluru. The number of ants leaving and entering the nest was recorded in 10 min random time windows every 1 h from 6:00 AM to 6:00 PM. This helped us build an activity pattern of the colonies and thereon, to identify the major foraging time window to take up further studies.
Over a period of 3 months, from May to July, all the colonies were randomly visited during the peak foraging period (Fig. 1; 9:00 AM to 12: AM) and observed for varying periods of time ranging from 30 to 90 min at each nest and, the number of ants recruited were recorded along with angle of their departure. For this, about one meter long lines, separated at ~ 200, were marked radiating away from the opening of the nest. Using these 18 lines as the reference directions, the angle at which the recruited ants departed at one meter away from the nest was recorded. Whenever a foraging group was found leaving the nest, the number of ants in it was recorded; the group was followed and videotaped using smart phone cameras till it reached the foraging area where its members generally dispersed breaking the group cohesion. Through out the 3 month study period, we encountered only 12 occasions when the groups were recruited. Among them, we could gather data only for eight groups owing to several logistic difficulties such as rains, vegetation complexity along the trail paths etc.
Positional fidelity
The videos were uploaded on to the computer and analyzed for the positional fidelity of ants. Each ant in the group was tracked and its position from the moving end towards the tail of the group was noted in at least about 500 random snapshots from the beginning to the end of the foraging trip. Each ant was visually tracked by adopting slow motion re run of the video and position was noted in different frames. The mean position for each ant, standard deviation, and the number of positions shifted from its previous position was computed for each ant and plotted on a rank order of the mean positions for each group. Since the groups studied had varied number of ants (and hence positions), we could not combine the data to arrive at the average positions for all groups. Therefore, in the results section, we provide the data for only one group with eight ants as an example. However, for combined analysis, we divided each group into five sections (ants at the leading tip as section 1 and tail ants as section 5), with an almost equal number of ants in each section. We then estimated the mean and SD of the positions occupied by all the ants in each segment.
The fidelity of ants to their positions in the foraging file is reflected by the deviations from their mean position and the number of forward and backward shifts they exhibited. Note that while ants in the middle can shift their positions both forward and backward almost equally, those in the extreme ends have restricted opportunities; while ants in the front have more opportunities to move back in the file, those towards the tail have more opportunities to move towards front of the file.
Role of ants at different positions
To test the cohesiveness of the group and the role of ants at different positions in maintaining it, we resorted to the removal and re-introduction treatments. When a group left the nest, it was videotaped using smart phone camera as usual for about 2–3 min, and then, an ant at a specified position was removed and its impact on the group videotaped; after about 60–90 s, the ants were released back into the group at about the same but not necessarily exactly, in its original position and videotaped again. The structural cohesiveness of the group was tested by measuring the inter-ant distance following the removal and re-introduction of the ants. For this, the distance between any two nearest ants was measured in each frame by taking the ant length as the unit (to avoid the problem of differential zooming during videotaping). Such inter-ant distance was measured for all ants and the average computed.
Availability of data and materials
The data is available for anyone who intends to check on the details not for any use. The data is with K N Ganeshaiah, (knganeshaiah@gmail.com).
Abbreviations
- d:
-
Inter-ant distance
- SD:
-
Standard Deviation
- α:
-
Mean Circular Angle
References
Bachelet E. Circular statistics in biology. London: London Academic Press; 1981.
Beckers RS, Goss JL, Deneubourg JL, Pasteels JM. Colony size, communication and ant foraging strategy. Psyche. 1989;96:239–56.
Davidson JD, Gordon DM. Spatial organization and interactions of harvester ants during foraging activity. J R Soc Interface. 2017;14:20170413. https://doi.org/10.1098/rsif.2017.0413.
Deneubourg JL, S Aron, S Goss, JM Pasteels and G Duerinck. Random behavior, amplification process and number of participants. How they contribute to the foraging properties of ants. In D Farmer, A Lapedes, N Packard and B Wendross, Ediotrs. Evolution, Games and Learning. Editors: 176–186, Physica 1986; D 22.
Deneubourg JL, Aron S, Goss S, Pasteels JM. The self-organizing exploratory pattern of Argentine ants. J Insect Behav. 1990;8:159–68.
Deneubourg JL, Goss SS, Pasteels JM, Fresneau D, Lachahud JP. Self organization mechanisms in ant socieiteis (II). In: Pasteels JM, Deneubourg JL, editors. Learning in foraging and division of labor. From Individual to collective behavior in insect societies. Basel: Birkhauser; 1987. p. 177–96.
Deneubourg JL, Goss SS, Franks N, Pasteels JM. The blind leading the blind: modeling chemically mediated army ant raid patterns. J Insect Behav. 1989;2:719–25.
Detrain C, Deneubourg JL. Self-organized structures in a super-organism: do ants “behave” like molecules? Science direct. Phys Life Rev. 2006;3:162–87.
Falcon-Corte’s A, Boyer D, Ramos-Ferna’ndez G. Collective learning from individual experiences and information transfer during group foraging. J R Soc Interface. 2019;16:20180803. https://doi.org/10.1098/rsif.2018.0803.
Franks NR. Army ants: a collective intelligence. Am Sci. 1989;77:138–45.
Franks NR, Fletcher CR. Spatial patterns in army ant foraging and migration: Ectionburchelli on Barco colando Island, Panama. Behav Ecol Sociobiol. 1983;12:261–70.
Frank E, Linsenmair E. Individual versus collective decision making: optimal foraging in the group-hunting termite specialist Megaponeraanalis. Anim Behav. 2017;130:27–35.
Franks NR, Richardson T. Teaching in tandem-running ants. Nature. 2006;439:153.
Ganeshaiah KN, Veena T. Plant design and non-random foraging by ants on Croton bonplandianumBaill (Euphorbiaceae). Anim Behav. 1988;36:1683–90.
Ganeshaiah KN, Veena T. Topology of the foraging trails of Leptogenousprocessionalis. Behav Ecol Socio Biol. 1991;29:263–70.
Leah E-K, Watmough J, Ermentrout GB. Trail following in ants: individual properties determine population behavior. Behav Ecol Socio Biol. 1995;36:119–33.
Pasteels JM, Deneubourg JL, Goss S. Transmission and amplification of information in a changing environment: the case of insect societies. In: Prigogine I, Sanglier M, editors. Laws of Nature in Human Conduct. Brussels: G.O.R.D.E.S; 1985. p. 129–56.
Traniello JFA. Foraging strategies of ants. Ann Rev Entomol. 1989;34:191–210.
Traniello JFA. Recruitment behavior, orientation, and the organization of foraging in the carpenter ant Camponotuspennsylvanicus degeer (Hymenoptera: Formicidae). Behav Ecol Socio Biol. 1977;2:61–79.
Walter I, Whitford G, Steinberger Y. Colony size and foraging strategies in desert seed harvester ants. J Arid Environ. 2017;145:18–23.
Acknowledgements
We thank Dr. K Chandrashekara, VVBelavadi, DrHemanth and Dr. ARV Kumar, from the Department of Entomology, for their help in the identification of the species. DrAparna, helped in the circular statistics.
Funding
This work emerged from the Summer Fellowships offered by three academies viz., IAS, ANSA and NAS to AP and PB during 2017 and 2018. Academy sponsored the travel and stay of both AP and PB during the study period.
Author information
Authors and Affiliations
Contributions
This work was conducted exclusively by the three authors listed. KNG was the mentor for the two students who worked in his lab as Summer Fellows from the Indian Academy of Sciences and also conceived the major work. AP and PB, the co-authors did the field work jointly under the guidance of KNG. PB simulated the process using her programming skills. AP did most of the analysis with the help of KNG. All authors have read and approved the manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Ashwathi, P., Puspita, B. & Ganeshaiah, K.N. Structural organization and cohesiveness of foraging groups in Camponotus sericeus (Fabricius) (Hymenoptera: Formicidae): locally regulated or self-organized?. BMC Zool 5, 13 (2020). https://doi.org/10.1186/s40850-020-00062-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40850-020-00062-6