
Abstract
In this paper, we are concerned with the stabilization of hybrid stochastic systems with variable delay by discrete-time state feedback control. By using Lyapunov functionals, we obtain an upper bound \(\tau ^{*}\) on the duration τ between two consecutive state observations. Meantime, we show that hybrid stochastic systems with variable delay can be stabilized by discrete-time state feedback control as long as \(\tau <\tau ^{*}\). Finally, two examples are given to demonstrate the applicability of our work.
Similar content being viewed by others

1 Introduction
In the real world, many systems are may experience abrupt changes in their structure and parameters caused by phenomena such as component failures or repairs and changing subsystem interconnections, and sudden environmental disturbances. Hybrid systems have been used to model these systems (see, e.g., [1, 2]). Since the underlying hybrid systems are in operation for a relatively long time, it is very important to study their asymptotic behavior. One of the important issues in the study of long run behavior is the analysis of stability. Some results on the asymptotic stability and exponential stability may be found in [3–6]. However, since some hybrid systems are not always stable, it is necessary to design a feedback control to make the controlled systems stable. It is well known that random noise can be utilized to stabilize an unstable system. The theory on stabilization by random noise has been studied by many authors (see, e.g., [7–10]).
On the other hand, one could design a deterministic feedback control in the drift coefficients so that the controlled stochastic systems become stable. For example, given an unstable hybrid stochastic system
Yuan [11] designed the linear feedback control \(A(r(t))x(t)\) to stabilize the hybrid stochastic system (1.1), while Mao [12] and Hu [13] used the delay feedback control \(u(x(t-\delta ),r(t),t)\) to make the hybrid stochastic system (1.1) become stable. Such a regular feedback control requires continuous observation of the state \(x(t)\) or \(x(t-\delta )\) for all times \(t\ge 0\). Obviously, this continuous control strategy is not easy to implement in practice. In 2013, Mao [14] designed a feedback control \(u(x([t/\tau ]\tau ),r(t),t)\) based on the discrete-time observations of the state \(x(t)\) at times \(0,\tau ,2\tau ,\dots \), and investigated the stabilization problem for hybrid stochastic systems. The latter is clearly more realistic and costs less in practice. Therefore, some recent results on stabilization with discrete time feedback control may be found in [15–18].
In the study of the above stabilization, the time delay τ is added in the feedback controller. However, the real phenomenon indicates that the uncontrolled system itself may be disturbed by the time delay. As we know, the time delay is inevitable in practice, which often leads to instability and poor performance of stochastic delay systems. Therefore, many scholars began to pay attention to the problem of stabilizing hybrid stochastic delay systems by using feedback control. In 2020, Li and Mao [19] considered a class of hybrid stochastic systems with constant delay
By applying the delay feedback control \(u(x(t-\tau ),r(t),t)\), they showed that the controlled system
is asymptotically stable and pth-moment exponentially stable. Since then, some scholars extended the stabilization results [19] to the discrete-time feedback control problem for Eq. (1.2) and achieved many results. For example, Mei et al. [20, 21] made use of the feedback controllers based on the discrete-time state observations to stabilize the unstable stochastic systems as in (1.2), and extended their stabilization results to the case of hybrid neutral stochastic delay systems. Lu et al. [22] discussed the stabilization of hybrid stochastic delay systems by feedback control based on the discrete-time observations of both state and mode, while Song et al. [23, 24] generalized the stabilization results of [22] to the case of highly nonlinear hybrid stochastic delay systems.
It is noted that the time delay in the above literature [19–24] is assumed to be a constant. However, many real stochastic delay models indicate that the time delay is a delay function. Therefore, a natural question is whether the discrete-time state feedback control can be used to stabilize such a stochastic system with variable delay. Recently, Dong and Mao [25] studied a class of hybrid stochastic systems with time-varying delay
They used the delay feedback control \(u(x(t-\tau (t))\) to stabilize the hybrid stochastic delay systems as in (1.4). To the best of our knowledge, when the time-varying delay \(\tau (t)\) is nondifferentiable, few authors have considered the problem of stabilization for hybrid stochastic delay systems by discrete-time state feedback control. Motivated by the above discussion, the main aim of this paper is to design a discrete-time feedback control \(u(x([t/\tau ]\tau ),r(t),t)\) to stabilize the given unstable system, namely
Compared with the previous work, the main contributions of this paper include:
(1) When the delay function \(h(t)\) is nondifferentiable, we are the first to study the feedback control for hybrid stochastic delay systems based on the discrete-time state observation, and an upper bound of the duration between two continuous state observations is obtained.
(2) By constructing the Lyapunov functional, we obtain sufficient conditions to ensure the stabilization of hybrid stochastic delay systems in the sense of \(H_{\infty}\) stability, mean square asymptotic stability, and exponential stability.
The rest of the paper is organized as follows. In Sect. 2, we introduce some notations and hypotheses concerning systems (2.1). In Sect. 3, we investigate the stabilization of hybrid stochastic delay systems by feedback control based on discrete-time state observations. Then in Sect. 4 we give two examples to illustrate our theory.
2 Preliminaries and the global solution
Throughout this paper, unless other specified, we use the following notation. Let \(|\cdot |\) denote the Euclidean norm in \(\mathbb{R}^{n}\). If A is a vector or matrix, its transpose is denoted by \(A^{\top}\). If A is a matrix, its trace norm is denoted by \(|A|=\sqrt{\text{trace}(A^{\top}A)}\) while its operator norm is defined by \(\|A\|=\sup \{|Ax|:|x|=1\}\). If A is a symmetric matrix, we denote by \(\lambda _{\min}(A)\) and \(\lambda _{\max}(A)\) its smallest and largest eigenvalues, respectively.
Let \((\Omega , {\mathcal {F}}, P)\) be a complete probability space with a filtration \(\{{\mathcal {F}}_{t}\}_{t\ge t_{0}}\) satisfying the usual conditions. Let \(w(t)\) be an m-dimensional Brownian motion defined on the probability space \((\Omega , {\mathcal {F}}, P)\). Let \(\tau >0\) and \(\mathbb{C}([{-\tau},0];\mathbb{R}^{n})\) denote the family of continuous functions ξ from \([{-\tau},0]\) to \(\mathbb{R}^{n}\) with the norm \(\|\xi \|=\sup_{{-\tau}\le u\le 0}|\xi (u)|\). Let \(r(t)\), \(t\ge 0\) be a right-continuous Markov chain on the probability space \((\Omega ,\mathcal {F},P)\) taking values in a finite state space \(S=\{1,2,\dots ,N\}\) with generator \(\Gamma =(\gamma _{ij})_{N\times N}\) given by
where \(\Delta >0\). Here \(\gamma _{ij}\ge 0\) is the transition rate from i to j, \(i\neq j\), while \(\gamma _{ii}=-\sum_{j\neq i}\gamma _{ij}\). We assume that the Markov chain \(r(\cdot )\) is independent of the Brownian motion \(w(\cdot )\).
In this paper, we consider hybrid stochastic systems with time-varying delay of the form
with initial data \(x(0)=x_{0}\in \mathbb{R}^{n}\), \(r(0)=r_{0}\in S\), and
Here \(h(t)\) is defined by Assumption 2.3, while \(\delta _{t}=[t/\tau ]\tau \), in which \([t/\tau ]\) is the integer part of \(t/\tau \), \(\tau >0\).
In this paper, the following hypotheses are imposed on the coefficients f, g, and u.
Assumption 2.1
For each integer \(d\ge 1\), there exists a positive constant \(L_{d}\) such that
for all \(x_{1},y_{1},x_{2},y_{2}\in \mathbb{R}^{n}\) with \(|x_{1}|\vee |y_{1}|\vee |x_{2}|\vee |y_{2}|\le d\) and any \((i,t)\in R_{+}\times S\). Moreover, we assume that there exists a constant \(L_{0}>0\) such that
for all \((x,y,i,t)\in \mathbb{R}^{n}\times \mathbb{R}^{n}\times S\times \mathbb{R}_{+}\).
Assumption 2.2
There exists a positive constant k such that
for all \(x,y\in \mathbb{R}^{n}\) and \((i,t)\in \mathbb{R}_{+}\times S\). Moreover, we assume that \(u(0,i,t)=0\) for all \((i,t)\in \mathbb{R}_{+}\times S\).
Assumption 2.3
Assume that the time-varying delay \(h(t)\) is a Borel measurable function from \(\mathbb{R}_{+}\) to \([\underline{h},\bar{h}]\), with the following property:
where \(\underline{h}\), h̄ are two positive constants with \(\underline{h}<\bar{h}\), \(E_{s,h}=\{t\in \mathbb{R}_{+}: t-h(t)\in [s,s+h)\}\) and \(m(\cdot )\) denotes the Lebesgue measure on \(\mathbb{R}_{+}\).
Remark 2.4
In the existing literature involving variable delay [19, 26, 27], the delay function \(h(t):\mathbb{R}_{+}\to \mathbb{R}_{+}\) is either constant or differentiable, with its derivative being bounded by \(\hat{h}\in (0,1)\). That is,
If \(h(t)=\tau \), then it follows that
If \(h(t)\) is differentiable with its derivative being bounded by \(\hat{h}\in (0,1)\), then by applying a time change, it follows that
However, these two conditions might not be a natural feature of stochastic delay systems in the real world. For example, piecewise constant delays occur frequently in sampled-data controls but such functions are not differentiable.
Remark 2.5
In practice, there are many delay functions that satisfy Assumption 2.3. For example, consider the delay function \(h(t)=0.1|\sin 2t|\) from \(\mathbb{R}_{+}\) to \([0,0.1]\). Obviously, it obeys the Lipschitz condition
for any \(0\le s< t<\infty \). In fact, it satisfies Assumption 2.3 with \(h_{0}= 1.25\). In particular, if \(h(t)\) is differentiable and its derivative is bounded by \(\hat{h}\in (0,1)\), then \(h(t)\) satisfies Assumption 2.3 with \(h_{0}=1/(1-\hat{h})\).
Lemma 2.6
Let Assumptions 2.3hold. Let \(T>T_{0}\ge 0\) and \(\Psi :[-\bar{h},T-\underline{h}]\to \mathbb{R}_{+}\) be a continuous function. Then
Proof
By Assumption 2.3, for any \(\varepsilon >0\), there exists a positive constant h̃ such that
Note that \(-\bar{h}\le t-h(t) \le T-\underline{h}\) for \(t\in [T_{0},T]\). Let n be any large integer such that \(h:=(T-\underline{h}-T_{0}+\bar{h})/n<\tilde{h}\). Set \(t_{q}=T_{0}-\bar{h}+qh\) for \(q=0,1,\dots ,n-1\). Recalling the definition of the Riemann–Lebesgue integral, we have
Noting that \(m(E_{t_{q},h})\le (h_{0}+\varepsilon )h\). Hence,
Letting \(\varepsilon \to 0\) yields the required assertion. □
Remark 2.7
In fact, Assumption 2.3 implies that \(h_{0}\ge 1\). Letting \(\psi (t)=1\) for all \(t\ge -\bar{h}\), Lemma 2.6 shows that
for any \(T> 0\), which implies
In particular, if \(h(t)\) degenerates to the constant delay τ, then \(h_{0}=1\).
Theorem 2.8
Let Assumptions 2.1–2.3hold, then Eq. (2.1) has a unique global solution \(x(t)\) on \(t\ge -\bar{h}\). Moreover, the solution has the property that
for any \(t\ge 0\).
3 Main results
The main aim is to establish sufficient stability criteria for hybrid stochastic systems with time-varying delay. Let us denote by \(C^{2,1}(\mathbb{R}^{n}\times S\times \mathbb{R}_{+};\mathbb{R}_{+})\) the family of all continuous nonnegative functions \(U(x,i,t)\) defined on \(\mathbb{R}^{n}\times S\times \mathbb{R}_{+} \) such that for each \(i\in S\), they are continuously twice differentiable in x and once in t. For \(U(x,i,t)\in C^{2,1}(\mathbb{R}^{n}\times S\times \mathbb{R}_{+}; \mathbb{R}_{+})\), we define the function \(\mathcal{L}U: \mathbb{R}^{n}\times \mathbb{R}^{n} \times S\times \mathbb{R}_{+} \to \mathbb{R}\) by
where
Assumption 3.1
Assume that there exists a function \(U\in C^{2,1}(\mathbb{R}^{n}\times S\times \mathbb{R}_{+};\mathbb{R}_{+})\) and three positive constants \(\lambda _{i}\), \(i=1,2,3\) such that
for all \((x,y,i,t)\in \mathbb{R}^{n}\times \mathbb{R}^{n}\times S\times \mathbb{R}_{+}\).
We can now state our first result.
Theorem 3.2
Let Assumptions 2.1, 2.2, 2.3, and 3.1hold. If \(\tau >0\) is sufficiently small for
then the solution of equation (2.1) with the initial data has the property
That is, Eq. (2.1) is \(H_{\infty}\) stable in mean square.
Proof
For any \(t\ge 2\bar{h}\), we define the segment processes \(\hat{x}_{t}=\{x(t+s):-2\bar{h}\le s\le 0\}\) and \(\hat{r}_{t}=\{x(t+s):-2\bar{h}\le s\le 0\}\). For \(\hat{x}_{t}\) and \(\hat{r}_{t}\) to be well defined for \(0\le t\le 2\bar{h}\), we set \(x(s)=x_{0}\) and \(r(s)=r_{0}\) for \(-2\bar{h}\le s \le 0\). The Lyapunov functional is defined by
for \(t\ge 2\bar{h}\), where
By the Itô formula and the fundamental theorem of calculus, we obtain
for \(t\ge 2\bar{h}\), where
By Assumptions 2.1, 2.2, and condition (3.3), we have
and
Inserting (3.7) and (3.8) into (3.6), we get
On the other hand, it follows from (2.1) that
By Assumption 3.1, it follows that
By Lemma 2.6, we get
Hence,
where
is a positive constant. It follows from (3.10) that
Letting \(t\to \infty \), we obtain
as required. The proof is therefore complete. □
Theorem 3.3
Under the same assumptions of Theorem 3.2, the solution of equation (2.1) with the initial data has the property
That is, Eq. (2.1) is asymptotically stable in mean square.
Proof
By the Itô formula, we have
By Assumptions 2.1, 2.2, and Lemma 2.6, we then get
where Q denotes a positive constant. By using Assumptions 2.1 and 2.2 again, we derive
Noting that \(6\tau ^{2}k^{2}<1\) by condition (3.3), we hence have
Substituting this into (3.12) yields
Using the substitution technique, we get
By Lemma 2.6, we have
Inserting this into (3.14) and applying Theorem 3.2, we derive
for any \(t\ge 2\bar{h}\). By the Itô formula, it follows that
for any \(2\bar{h}\le t_{1}< t_{2}<\infty \). By using Assumptions 2.1, 2.2, and (3.15), we can show that
This implies that \(E|x(t)|^{2}\) is uniformly continuous in t on \([2\bar{h},\infty ]\). It then follows from (3.4) that \(\lim_{t\to \infty}E|x(t)|^{2}=0\), as required. □
In the previous argument, we have discussed the asymptotic stabilization. However, this stability does not reveal the rate at which the solution tends to zero. So, we will discuss the exponential stabilization by the discrete-time state feedback control. For this purpose, we need to impose another condition.
Assumption 3.4
Assume that there exist two positive constants \(C_{1}\) and \(C_{2}\) such that
for all \(x\in \mathbb{R}^{n}\), \(i\in S\), and \(t\in \mathbb{R}_{+}\).
Theorem 3.5
Let Assumptions 2.1, 2.2, 2.3, 3.1, and 3.4hold. Let \(\tau >0\) be sufficiently small for (3.3) to hold, and set
then the solution of equation (2.1) satisfies
and
for all initial data \(\hat{x}_{2\bar{h}}\) and \(\hat{r}_{2\bar{h}}\), where \(\gamma >0\) is the unique root to the following equation:
here \(Q_{4}=\frac{k^{2}}{\lambda _{1}}[(4\tau +2)\tau L_{0}^{2}+4\tau ^{2} k^{2}]+ \frac{24\tau ^{2}(\tau +1)k^{4}L_{0}^{2}}{\lambda _{1}(1-6\tau ^{2}k^{2})}\), \(Q_{5}=(4\tau +2)L_{0}^{2}\), and \(Q_{6}= \frac{24\tau ^{2}(\tau +1)k^{4}L_{0}^{2}}{\lambda _{1}(1-6\tau ^{2}k^{2})}\).
Proof
By the Itô formula, we have
for \(t\ge 2\bar{h}\). By Assumption 3.4 and using (3.10), we obtain
where
By the definition of Lyapunov functional (3.5) and Assumption 3.4, we then have
By (3.13), we get
where \(Q_{4}\), \(Q_{5}\), and \(Q_{6}\) have been defined in (3.19). But
Inserting (3.21), (3.22) into (3.20), we can obtain that
Using the substitution technique, we have
and
Substituting this into (3.23) yields
where
Recalling (3.19), we obtain
which implies that (3.17) holds. Finally, by [1], we can obtain the other assertion (3.18) from (3.24). The proof is therefore complete. □
Corollary 3.6
Let Assumptions 2.1, 2.2, and 2.3hold. Assume that there exists a function \(U\in C^{2,1}(\mathbb{R}^{n}\times S\times \mathbb{R}_{+};\mathbb{R}_{+})\) and some positive constants \(C_{i},i=1,2\) and \(\beta _{i}\), \(i=1,2,3\) such that
and
for all \(x,y\in \mathbb{R}^{n}\), \(i\in S\) and \(t\in \mathbb{R}_{+}\). Let \(\tau >0\) be sufficiently small for (3.3) to hold, and set
Then the assertions of Theorem 3.5still hold, provided \(\lambda _{1}<\beta _{1}/\beta _{3}^{2}\).
Proof
In fact, we only need to verify whether Assumption 3.1 is true. If \(\lambda _{1}<\beta _{1}/\beta _{3}^{2}\), then it follows from (3.26) that
Set \(\lambda _{2}=\beta _{1}-\lambda _{1}\beta _{3}^{2}\) and \(\lambda _{3}=\beta _{2}\), then Assumption 3.1 holds. □
4 Two examples
Let us now discuss two examples to illustrate our theory.
Example 4.1
Consider an unstable hybrid stochastic system with time-varying delay,
on \(t\ge 0\), and assume that the coefficients f and g satisfy the linear growth condition, while the time delay \(h(t)\) satisfies Assumption 2.3. Let us design a discrete-time state feedback control to stabilize system (4.1). Now, we use a linear controller \(u(x,i,t)=F(i)x\), where \(F(i)\in \mathbb{R}^{n\times n}\) for all \(i\in S\). Therefore, the controlled hybrid stochastic systems with time-varying delay has the form
It is easy to obtain that Assumption 2.2 holds with \(k=\max_{i\in S}\|F(i)\|\). Choose \(U(x,i,t)=q_{i}|x|^{2}\), where \(q_{i}>0\), then we have
We assume that the following linear matrix inequalities:
have their solutions for \(q_{i}>0\) and \(Y_{i}\in \mathbb{R}^{n\times n}\) (\(i\in S\)). Set \(F(i)=q_{i}^{-1}Y(i)\) and
Then, we see that (3.26) is satisfied. The corresponding parameters in Corollary 3.6 become \(C_{1}=\min_{i\in S}q_{i}\), \(C_{2}=\max_{i\in S}q_{i}\). Choose \(\lambda _{1}<\beta _{1}/\beta _{3}^{2}\), and set \(\lambda _{2}=\beta _{1}-\lambda _{1}\beta _{3}^{2}\) and \(\lambda _{3}=\beta _{2}\). Let \(\tau >0\) be sufficiently small for (3.3) to hold, then, by Corollary 3.6, the controlled hybrid stochastic system with time-varying delay (4.2) is exponentially stable in mean square and almost surely as well.
Example 4.2
Let \(r(t)\) be a right-continuous Markov chain on the state space \(S=\{1,2\}\) with its generator
Consider the following one-dimensional hybrid stochastic system with time-varying delay:
on \(t\ge 0\), where
and
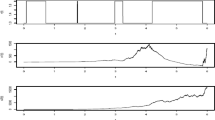
It is easy to obtain that Assumption 2.1 holds with \(L_{0}=0.5\) and \(h(t)\) satisfies Assumption 2.3 with \(\underline{h}=0.05\), \(\bar{h}=0.25\), and \(h_{0}=1.25\). A computer simulation (Fig. 1) shows that Eq. (4.4) is not almost surely exponentially stable.

Computer simulation of the path of the hybrid stochastic system with time-varying delay (4.4) using the Euler–Maruyama method with step size 10−3 and initial values \(x(0)=2\) and \(r(0)=1\)
Now consider the linear controller of the form \(u(x,i,t)=F(i)x\) (\(i=1,2\)) and the controlled system given as follows:
Obviously, we derive that the linear matrix inequalities (4.5) have their solutions \(q_{1}=1\), \(q_{2}=2\), \(Y(1)=-16\), and \(Y(2)=-8\). Then, we have \(F(1)=-16\) and \(F(2)=-4\). Hence, we can obtain that \(k=16\), \(\beta _{1}=15\), \(\beta _{2}=2\), and \(\beta _{3}=4\). Choose \(\lambda _{1}=0.5\) and set \(\lambda _{2}=7\), \(\lambda _{3}=2\). Let \(\tau <2.42\times 10^{-3}\), then, by Corollary 3.6, the controlled hybrid stochastic system with time-varying delay (4.5) is exponentially stable in mean square and almost surely as well. A computer simulation (Fig. 2) clearly supports this result.

Computer simulation of the path of the controlled hybrid stochastic system with time-varying delay (4.5) with \(\tau =10^{-3}\) using the Euler–Maruyama method with step size 10−3 and initial values \(x(0)=2\) and \(r(0)=1\)
5 Conclusion
This paper is devoted to the stabilization of hybrid stochastic systems with time-varying delay by feedback controls based on discrete-time state observations. An upper bound \(\tau ^{*}\) on the duration τ between two consecutive state observations is obtained by the method of Lyapunov functionals. In the meantime, some sufficient conditions in the sense of \(H_{\infty}\) stability, mean-square asymptotic stability, and exponential stability have been established for the hybrid stochastic systems with time-varying delay as long as \(\tau <\tau ^{*}\).
Availability of data and materials
Not applicable.
References
Mao, X., Yuan, C.: Stochastic Differential Equations with Markovian Switching. Imperial College Press, London (2006)
Yin, G., Zhu, C.: Hybrid Switching Diffusions: Properties and Applications, vol. 63. Springer, New York (2010)
Ji, Y., Chizeck, H.J.: Controllability, stabilizability and continuous time Markovian jump linear quadratic control. IEEE Trans. Autom. Control 35, 777–788 (1990)
Mao, X.: Stability of stochastic differential equations with Markovian switching. Stoch. Process. Appl. 79, 45–67 (1999)
Yue, D., Han, Q.: Delay-dependent exponential stability of stochastic systems with time-varying delay, nonlinearity, and Markovian switching. IEEE Trans. Autom. Control 50, 217–222 (2005)
Hasminskii, R.Z., Zhu, C., Yin, G.: Stability of regime-switching diffusions. Stoch. Process. Appl. 117, 1037–1051 (2007)
Arnold, L., Crauel, H., Wihstutz, V.: Stabilization of linear systems by noise. SIAM J. Control Optim. 21, 451–461 (1983)
Mao, X., Yin, G.G., Yuan, C.: Stabilization and destabilization of hybrid systems of stochastic differential equations. Automatica 43, 264–273 (2007)
Appleby, J., Mao, X., Rodkina, A.: Stabilization and destabilization of nonlinear differential equations by noise. IEEE Trans. Autom. Control 53, 683–691 (2008)
Deng, F., Luo, Q., Mao, X.: Stochastic stabilization of hybrid differential equations. Automatica 48, 2321–2328 (2012)
Yuan, C., Lygeros, J.: On the exponential stability of switching diffusion processes. IEEE Trans. Autom. Control 50, 1422–1426 (2005)
Mao, X., Lam, J., Huang, L.: Stabilization of hybrid stochastic differential equations by delay feedback control. Syst. Control Lett. 57, 927–935 (2008)
Hu, J., Liu, W., Deng, F., Mao, X.: Advances in stabilization of hybrid stochastic differential equations by delay feedback control. SIAM J. Control Optim. 58, 735–754 (2020)
Mao, X.: Stabilization of continuous-time hybrid stochastic differential equations by discrete-time feedback control. Automatica 49, 3677–3681 (2013)
Mao, X.: Almost sure exponential stabilization by discrete-time stochastic feedback control. IEEE Trans. Autom. Control 61, 1619–1624 (2015)
You, S., Liu, W., Lu, J., Mao, X., Qiu, Q.: Stabilization of hybrid systems by feedback control based on discrete-time state observations. SIAM J. Control Optim. 53, 905–925 (2015)
Fei, C., Fei, W., Mao, X., Xia, D., Yan, L.: Stabilization of highly nonlinear hybrid systems by feedback control based on discrete-time state observations. IEEE Trans. Autom. Control 65, 2899–2912 (2019)
Li, X., Mao, X., Mukama, D.S., Yuan, C.: Delay feedback control for switching diffusion systems based on discrete-time observations. SIAM J. Control Optim. 58, 2900–2926 (2020)
Li, X., Mao, X.: Stabilisation of highly nonlinear hybrid stochastic differential delay equations by delay feedback control. Automatica 112, 108657 (2020)
Mei, C., Fei, C., Fei, W., Mao, X.: Stabilisation of highly nonlinear continuous time hybrid stochastic differential delay equations by discrete time feedback control. IET Control Theory Appl. 14, 313–323 (2020)
Mei, C., Fei, C., Shen, M., Fei, W., Mao, X.: Discrete feedback control for highly nonlinear neutral stochastic delay differential equations with Markovian switching. Inf. Sci. 592, 123–136 (2022)
Lu, J., Li, Y., Mao, X., Pan, J.: Stabilization of nonlinear hybrid stochastic delay systems by feedback control based on discrete time state and mode observations. Appl. Anal. 3, 1077–1100 (2022)
Song, G., Wang, Y., Li, T., Chen, S.: Quantized feedback stabilization for nonlinear hybrid stochastic time-delay systems with discrete time observation. IEEE Trans. Cybern. (2021). https://doi.org/10.1109/TCYB.2021.3129221
Song, G., Wang, H., Li, T., Wang, Y.: Quantized stabilization for highly nonlinear stochastic delay systems by discrete time control. Circuits Syst. Signal Process. 41, 2595–2613 (2022)
Dong, H., Mao, X.: Advances in stabilization of highly nonlinear hybrid delay systems. Automatica 136, 110086 (2022)
Hu, L., Mao, X., Shen, Y.: Stability and boundedness of nonlinear hybrid stochastic differential delay equations. Syst. Control Lett. 62, 178–187 (2013)
Fei, W., Hu, L., Mao, X., Shen, M.: Delay dependent stability of highly nonlinear hybrid stochastic systems. Automatica 82, 165–170 (2017)
Acknowledgements
Wei Mao would like to thank the National Natural Science Foundation of China (11401261), 333 High-level Project of Jiangsu Province, the Qing Lan Project of Jiangsu Province and the Scientific Research Foundation of Jiangsu Second Normal University for their financial support. Liangjian Hu would like to thank the National Natural Science Foundation of China (11471071, 12126202) for its financial support.
Funding
This work is supported by the National Natural Science Foundation of China (Grant No. 11401261, 11471071, 12126202).
Author information
Authors and Affiliations
Contributions
All authors have equal contribution in this article. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Appendix
Appendix
Proof of Theorem 2.8
By Mao [1], we know that Assumptions 2.1 and 2.2 guarantee the existence of the unique maximal local solution \(x(t)\) on \(t\in [0,\sigma _{\infty})\), where \(\sigma _{\infty}\) is the explosion time. Let \(k_{0}\) be the bound for ξ. For each integer \(k\ge k_{0}\), define the stopping time
Clearly, \(\tau _{k}\) is increasing as \(k\to \infty \). Set \(\tau _{\infty}=\lim_{k\to \infty}\tau _{k}\), whence \(\tau _{\infty}\le \sigma _{\infty}\) a.s. Note if we can show that \(\tau _{\infty}=\infty \) a.s., then \(\sigma _{\infty}=\infty \) a.s. So we just need to show that \(\tau _{\infty}=\infty \) a.s. Now, we shall show that \(\tau _{\infty } > \tau \) a.s. For any \(k\ge k_{0}\) and \(t\in [0,\tau ]\), by the Itô formula, it is easy to show that
By Assumptions 2.1 and 2.2, we then get
where \(\alpha _{1}=3L+2L^{2}\), \(\alpha _{2}=L+2L^{2}\), \(H_{1}=\alpha _{2}\int _{0}^{\tau }E|x(s-h(s))|^{2}\,ds\). Noting that for \(t\in [0,\tau ]\), \(-\bar{h}\le t-h(t)\le \tau -\underline{h}\le 0\), we have
Then it follows that
Hence, by the Gronwall inequality, we have
for any \(k\ge k_{0}\). In particular, \(E|x(\tau _{k}\wedge \tau )|^{2} \le (|\xi (0)|^{2}+H_{1})e^{( \alpha _{1}+2k)\tau}\), \(\forall k\ge k_{0}\). This implies \(k^{2} P(\tau _{k}\le \tau ) \le (|\xi (0)|^{2}+H_{1})e^{(\alpha _{1}+2k) \tau} \). Letting \(k\to \infty \), we hence obtain that \(P(\tau _{\infty }\le \tau ) =0\), namely \(P(\tau _{\infty } > \tau ) = 1 \). Letting \(k\to \infty \) in (6.2) yields
Let us now proceed to prove \(\tau _{\infty } > 2\tau \) a.s., given that we have shown (6.3). For any \(k\ge k_{0}\) and \(t\in [0, 2\tau ]\), it follows from (6.1) that
where \(H_{2}=\alpha _{2}\int _{0}^{2\tau }E|x(s-h(s))|^{2}\,ds\). Note that for \(t\in [0,2\tau ]\), \(-\bar{h}\le t-h(t)\le \tau \). By Lemma 2.6 and (6.3), we have
Consequently,
Gronwall inequality then implies
In particular, \(E |x(\tau _{k}\wedge 2\tau |^{p} \le (|\xi (0)|^{2}+H_{2})e^{( \alpha _{1}+2k)2\tau}\), \(\forall k\ge k_{0} \). This implies \(k^{2} P(\tau _{k}\le 2\tau ) \le (|\xi (0)|^{2}+H_{2})e^{(\alpha _{1}+2k)2 \tau} \). Letting \(k\to \infty \), we then obtain that \(P(\tau _{\infty }\le 2\tau ) =0\), namely \(P(\tau _{\infty } > 2\tau ) = 1\). Letting \(k\to \infty \) in (6.5) yields
Repeating this procedure, we can show that, for any integer \(i\ge 1\), \(\tau _{\infty } > i\tau \) a.s.,
where
We must therefore have \(\tau _{\infty } = \infty \) a.s., and the required assertion (2.7) holds as well. □
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mao, W., Xiao, X., Miao, L. et al. Stabilization of hybrid stochastic systems with time-varying delay by discrete-time state feedback control. Adv Cont Discr Mod 2023, 12 (2023). https://doi.org/10.1186/s13662-023-03759-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-023-03759-3