
Abstract
In this paper, we study the uniqueness and existence of the solution of a non-autonomous and nonsingular delay difference equation using the well-known principle of contraction from fixed point theory. Furthermore, we study the Hyers–Ulam stability of the given system on a bounded discrete interval and then on an unbounded interval. An example is also given at the end to illustrate the theoretical work.
Similar content being viewed by others

1 Introduction
In most of the fields of science like mathematics, statistics, economics, and engineering, people take the number of samples as a discrete form, not in a continuous form. In real life, some model such as [1–4] are used to analyze the real life problems from mechanics and biomathematics by means of partial differential equations, but some models like cobweb [5] and national income model [6] can be described by difference equations. People study difference equations because of their many applications in population models and information transmission. S.A. Kuruklis [7] and J.S. Yu [8] studied the asymptotic behavior of the variable type delay difference equation. W. Kosmala [9] provided a good insight and discussed the behavior of solution of the difference equation of the type \(U_{k+1}=(A+U_{k-1})/(BU_{k}+U_{k-1})\). Zheng-Fan Liu [10] designed the exponential behavior of switch discrete-time delay system. Marwen Kermani [11] discussed the stability techniques about the switched nonlinear time-delay difference equations. Yuanyuan Liu [12] described the stability techniques of a higher-order difference system. The stability of higher-order rational difference systems was studied by A. Khaliq [13].
A difference system has a lot of qualitative properties, among them stability is a very useful property. It is a vital part for a system to work appropriately. There are many types of stability, but today’s general interest that leads people to want to know more is about Hyers–Ulam stability. Ulam [14], in 1940, initially studied the theory of Hyers–Ulam stability. When he lectured a seminar, he put out some problems related to the group homomorphisms stability. A year later, Hyers [15] answered brightly to the problem by considering that groups are Banach spaces, specified by Hyers–Ulam stability. Rassias [16], in 1978, gave an outstanding general approach of the Hyers–Ulam stability, specified by Hyers–Ulam–Rassias stability. In particular, he also extended the same concept to Cauchy difference equation. This idea was then extended to differential equations by Obloza [17]. Later on, this stability of difference equations was proved by Jung [18] and Khan et al. [19].
Delay systems can have a lot of uses in the characterization of the evolution process in automatic engine, physiology system, and control theory. Khusainov and Shuklin [20] solved the linear autonomous delay-time system with commutable matrices. Diblik and Khusainov [21] gave the description about the solutions of a discrete delayed system using the idea [20]. Then Wang et al. [22] studied relative controllability and exponential stability of nonsingular systems. The consequences about Ulam stability of nonsingular delay differential equation having first order were shown by A. Zada et al. [23]. Recently, some results on Ulam type stability of a first-order nonlinear impulsive time varying delay dynamic system was discussed by S.O. Shah et al. in [24, 25].
In this study, we discuss the Hyers–Ulam stability of nonsingular delay difference system of the form:
where the constant matrices \(\mathbb{A}\), M, and \(\mathcal{N}\) are commutable having order \(n\times n\). The matrix A is invertible and \(\phi \in \mathcal{B}(\mathbb{Z}_{+},X)\), where \(\mathcal{B}(\mathbb{Z}_{+},X)\) is the space of bounded sequences, also \(\mathbb{F}\in \mathcal{CS}(\mathbb{Z}_{+}\times X,X)\), the space of all convergent sequences, where \(I=\{-k,-k+1,\ldots,0\}\), \(\mathbb{Z}_{+}=\{0,1,2,\ldots \}\) and \(X=\mathcal{R}^{n}\). Such work in the continuous case is given in [26].
2 Preliminaries
In this portion, we discuss some definitions and basic concepts which are useful for establishing the main work. We will use the notation \(\mathcal{R}\), \(\mathcal{R}^{+}\), \(\mathcal{Z}_{+}\) for the real numbers, non-native real numbers, all nonnegative integers, and the space of all n-tuples of \(\mathcal{R}\) is denoted by \(\mathcal{R}^{n}\). The set \(J=\{0,1,\ldots,k\}\) is the subset of \(\mathcal{Z}\) and \(X=\mathcal{R}^{n}\), the space of all bounded and convergent sequences from J to X is represented by \(\mathcal{CS}(J,X)\) with the norm
Besides, we define \(\mathcal{C}^{1}(J,X)=\{\mathbf{G}\in \mathcal{C}(J,X) ; \mathbf{G}'\in \mathcal{C}^{1}(J,X)\}\).
Lemma 2.1
The nonsingular delay difference system
has the solution
where \(MN=NM\), \(NA=AN\), and \(MA=AM\).
The proof can be easily obtained by successively putting the values of \(n \in \{-k,-k+1,\ldots\}\).
Definition 2.1
The solution of system (1.1) will be exponentially stable if there exist positive real numbers \(\lambda _{1}\) and \(\lambda _{2}\) such that
Definition 2.2
For a positive real number ϵ, the sequence \(\boldsymbol{\psi}_{n}\) is said to be an ϵ-approximate solution of (1.1) if
Definition 2.3
System (1.1) will be Hyers–Ulam stable if, for every ϵ-approximate solution \(\boldsymbol{\psi}_{n}\) of system (1.1), there will be an exact solution \(\mathbf{Y}_{n}\) of (1.1) and a nonnegative real number K such that
Definition 2.4
A function \(\Vert \cdot \Vert _{\beta }:\mathbb{V}\rightarrow [0,\infty )\) is called β-norm, with \(0<\beta \leq 1\), where \(\mathbb{V}\) is a vector space over field K, if the function satisfies the following properties:
-
(1)
\(\Vert \mathcal{H} \Vert _{\beta }=0\) if and only if \(\mathcal{G}=0\);
-
(2)
\(\Vert \kappa \mathcal{H} \Vert _{\beta }= \vert \kappa \vert ^{\beta } \Vert \mathcal{H} \Vert _{ \beta }\) for each \(\kappa \in \mathbf{K} \) and \(\mathcal{H}\in \mathbb{V}\);
-
(3)
\(\Vert \mathcal{H}+\mathcal{H}_{1} \Vert _{\beta }\leq \Vert \mathcal{H} \Vert _{\beta }+ \Vert \mathcal{H}_{1} \Vert _{\beta } \) for all \(\mathcal{H}, \mathcal{H}\in \mathbb{V}\).
And \((\mathbb{V}, \Vert \cdot \Vert _{\beta })\) is said to be a β-norm space.
Lemma 2.2
If \(z_{n}\) and \(g_{n}\) are nonnegative sequences and \(a\geq 0\), which satisfies the inequality
then
Remark 2.1
It is clear from (2.1) that \(\mathbf{Y}\in \mathcal{C}^{1}(J,X)\) satisfies (2.1) if and only if there exists \(f\in \mathcal{CS}(J,X)\) satisfying
3 Existence result
To describe the existence result of the system given by (1.1), we have the following assumptions which will be needed:
- \(\Lambda _{1}\)::
-
The linear system \(A\mathbf{G}_{n+1}=M\mathbf{G}_{n}+N\mathbf{G}_{n-k}\) is well modeled.
- \(\Lambda _{2}\)::
-
The continuous function \(\mathcal{H}:J\times X \rightarrow X\) satisfies the Caratheodory condition
$$ \bigl\Vert \mathcal{H}(n,f)-\mathcal{H} \bigl(n,f^{\prime } \bigr) \bigr\Vert \leq \mathcal{K} \bigl\Vert f-f^{\prime } \bigr\Vert , \quad \mathcal{K}\geq 0, $$for every \(f, f^{\prime }\in X\).
- \(\Lambda _{3}\)::
-
\(\mathcal{M}^{n-1}\mathcal{A}^{-n}(N+\mathcal{K})L<1\).
Theorem 1
If assumptions \(\Lambda _{1}\)–\(\Lambda _{3}\) hold, then system (1.1) has the unique solution \(\mathbf{G}\in \mathcal{B}(J,X)\).
Proof
Define \(T:\mathcal{B}(J,X)\rightarrow \mathcal{B}(J,X)\) by
Now, for any \(\mathbf{G}, \mathbf{G}^{\prime }\in \mathcal{B}(J,X)\), we have
This implies that
Thus, T is a contraction if \(\Vert \mathbf{M}^{n} \Vert \Vert \mathbb{A}^{-n} \Vert (\mathcal{N}+\mathcal{K})L < 1\), so (by BCP) it has a unique fixed point and will be the solution of system(1.1). □
4 Hyers–Ulam stability on bounded discrete interval
To describe the Hyers–Ulam stability of system (1.1) over a bounded discrete interval, we have to put some assumptions:
- \(\Lambda _{1}\)::
-
The linear system \(A\mathbf{G}_{n+1}=M\mathbf{G}_{n}+N\mathbf{G}_{n-k}\) is well posed.
- \(\Lambda _{2}\)::
-
The map \(F:J\times X \rightarrow X\) satisfies the Caratheodory condition
$$ \bigl\Vert F(n,\vartheta )-F \bigl(n,\vartheta ^{\prime } \bigr) \bigr\Vert \leq \mathrm{K} \bigl\Vert \vartheta - \vartheta ^{\prime } \bigr\Vert $$for some \(\mathrm{K}\geq 0\) and for all \(\vartheta , \vartheta ^{\prime }\in \mathcal{B}(J,X)\).
- \(\Lambda _{3}\)::
-
There exists nondecreasing \(\varphi _{n} \in \mathcal{B}(J,X)\) with a constant η such that
$$ \sum_{r=1}^{n-k}\phi _{r}\leq \eta \varphi _{n} \quad \text{for each } n \in J. $$
Theorem 2
If \(\Lambda _{1}\), \(\Lambda _{2}\), and \(\Lambda _{3}\) along with (2.1) and Remark 2.1hold, then system (1.1) is Hyers–Ulam stable.
Proof
The solution of delay difference equation
is
From Remark 2.1 the solution of
is
Now, we have
Therefore, system (1.1) is Hyers–Ulam stable over a bounded discrete interval. □
5 Hyers–Ulam stability on unbounded discrete interval
To discuss the Hyers–Ulam stability over an unbounded discrete interval, we have the following assumptions:
- \(A_{1}\)::
-
The operator family \(\Vert L^{4} \Vert \leq Ne^{-\nu n}\), \(n\geq 0\), \(\nu \geq 0\), \(N\geq 1\).
- \(A_{2}\)::
-
The linear system \(A\mathbf{G}_{n+1}=M\mathbf{G}_{n}+N\mathbf{G}_{n-k}\) is well posed.
- \(A_{3}\)::
-
The continuous function \(\mathbb{H}:\mathbb{Z}_{+}\times X\rightarrow X\) satisfies the Caratheodory condition
$$ \bigl\Vert \mathbb{H}(n,\omega )-\mathbb{H} \bigl(n,\omega ^{\prime } \bigr) \bigr\Vert \leq K \bigl\Vert \omega - \omega ^{\prime } \bigr\Vert , \quad K\geq 0, $$for every \(n\in \mathbb{Z}_{+}\) \(\omega ,\omega ^{\prime }\in X\).
- \(A_{4}\)::
-
Also, assume that
$$ \sum_{r=1}^{n-1}\phi _{r}\leq \eta \varphi _{n} $$for each \(n\in \mathbb{Z}_{+}\), \(\eta \geq 0\) and \(\varphi _{n}\) is a convergent sequence.
Theorem 3
If \(A_{1}\)–\(A_{4}\) along with (2.1) and Remark 2.1are satisfied, then system (1.1) is Hyers–Ulam stable over an unbounded interval.
Proof
Since the exact solution of the non-autonomous and nonsingular delay difference equation
is
Letting Y be the approximate solution of the above system, then clearly for a sequence \(f_{n}\) with \(\Vert f_{n} \Vert \leq \epsilon \) we have
and
Now, consider
That is,
That is,
where \(\mathbf{K}= N\eta K\). Thus, system (1.1) is Hyers–Ulam stable over an unbounded discrete interval. □
6 β-Hyers–Ulam stability
To describe β-Hyers–Ulam stability over an unbounded interval, we needed some assumptions:
- \(A_{0}\)::
-
The operator family \(\Vert L^{4} \Vert \leq \mathbb{N}e^{k n}\), \(n\geq 0\), \(k \leq 0\), \(N\geq 1\).
- \(A_{1}\)::
-
The linear system \(A\mathbf{G}_{n+1}=M\mathbf{G}_{n}+N\mathbf{G}_{n-k}\) is well posed.
- \(A_{2}\)::
-
The continuous function \(\mathbf{H}:\mathbb{Z}_{+}\times X\rightarrow X\) satisfies the Caratheodory condition
$$ \bigl\Vert \mathbf{H}(n,\rho )-\mathbf{H} \bigl(n,\rho ^{\prime } \bigr) \bigr\Vert \leq K_{n} \bigl\Vert \rho - \rho ^{\prime } \bigr\Vert , \quad K\geq 0, $$for every \(n\in \mathbb{Z}_{+}\) \(\rho ,\rho ^{\prime }\in X\).
- \(A_{3}\)::
-
Also, assume that
$$ \sum_{i=k+1}^{n}e^{kn}(N+K_{n}) \leq \eta _{\varphi }\varphi _{n}, \quad k\leq 0, $$for each \(n\in \mathbb{Z}_{+}\), \(\eta _{\varphi } \geq 0\), and \(\varphi _{n}\) is a convergent sequence.
By considering inequality (2.1) and the above mentioned assumptions, we are able to prove the following theorem.
Theorem 4
If \(A_{0}\)–\(A_{3}\) are satisfied, then system (6.1) is β-Hyers–Ulam stable over an unbounded interval.
Proof
The only one solution of nonsingular delay difference equation
is
Let \(\mathcal{Y}\) satisfy (2.1), then for every \(n\in \mathcal{Z}_{+}\) we have
Now,
Now, using
we obtain
with the help of Lemma(2.2), we get
where
So, system (6.1) is β-Hyers–Ulam stable over an unbounded interval. □
7 An example
Consider we have the following nonsingular delay difference equation:
with inequality
here \(k=3\). If we fix
and (obviously, , when \(n=0\)), hence, we get
Moreover, if G satisfies (7.2), then there exists \(f_{n}\) such that \(\Vert f_{n} \Vert \leq 0.7\), and
also the solution of (7.1) is
where \(\mathcal{MA}=\mathcal{AM}\), \(\mathcal{NA}=\mathcal{AN}\), and \(\mathcal{MN}=\mathcal{NM}\).
Let \(\epsilon =0.7\), and \(f:\mathcal{Z}_{+}\rightarrow \mathcal{R}^{2}\) be as given below
then clearly
Now the perturbed delay difference system (7.3) has the solution
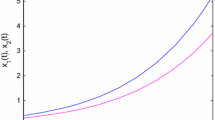
Using Mathematica, we get the values given in Table 1.
Plotting these values, we have the following graphs.

Hence, we have a solution within a multiple of \(\epsilon =0.7\) and a constant, so system (1.1) has a unique solution in \(B(\mathcal{Z}_{+},\mathcal{R}^{2})\), which is Hyers–Ulam stable on \(\mathcal{Z}_{+}\).
Availability of data and materials
No data were used.
References
Frassu, S., Viglialoro, G.: Boundedness for a fully parabolic Keller–Segel model with sublinear segregation and superlinear aggregation. Acta Appl. Math. 171(1), 19 (2021)
Li, T., Pintus, N., Viglialoro, G.: Properties of solutions to porous medium problems with different sources and boundary conditions. Z. Angew. Math. Phys. 70(3), 86 (2019)
Li, T., Viglialoro, G.: Boundedness for a nonlocal reaction chemotaxis model even in the attraction-dominated regime. Differ. Integral Equ. 34(5/6), 315–336 (2021)
Li, T., Viglialoro, G.: Analysis and explicit solvability of degenerate tensorial problems. Bound. Value Probl. 2018(1), 2 (2018)
Brianzoni, S., Mammana, C., Michetti, E., Zirilli, F.: A stochastic cobweb dynamical model. Discrete Dyn. Nat. Soc. 2008, 219653 (2008)
Sarkar, B., Mondal, S.P., Hur, S., Ahmadian, A., Salahshour, S., Guchhait, R., Iqbal, M.W.: An optimization technique for national income determination model with stability analysis of differential equation in discrete and continuous process under the uncertain environment. RAIRO Oper. Res. 53(5), 1649–1674 (2019)
Kuruklis, S.A.: The asymptotic stability of difference equation. J. Math. Anal. Appl. 188(3), 719–731 (1994)
Yu, J.S.: Asymptotic stability for a linear difference equation with variable delay. Comput. Math. Appl. 36(10–12), 203–210 (1998)
Kosmala, W., Teixeira, C.: More on the difference equation. Appl. Anal. 81(1), 143–151, 81.1 (2002)
Fan, L.Z., Cai, C.X., Zou, Y.: Switching signal design for exponential stability of uncertain discrete-time switched time-delay systems. J. Appl. Math. 2013, 416292 (2013)
Marwen, K., Sakly, A.: On stability analysis of discrete-time uncertain switched nonlinear time-delay systems. Adv. Differ. Equ. 2014(1), 1 (2014)
Yuanyuan, L., Meng, F.: Stability analysis of a class of higher order difference equations. Abstr. Appl. Anal. 2014, 434621 (2014)
Khaliq, A., et al.: On stability analysis of higher-order rational difference equation. Discrete Dyn. Nat. Soc. 2020, 3094185 (2020)
Ulam, S.M.: A Collection of Mathematical Problems. Interscience, New York, no. 8 (1960)
Hyers, D.H.: On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 27(4), 222 (1941)
Rassias, T.: On the stability of the linear mapping in Banach spaces. Proc. Am. Math. Soc. 72(2), 297–300 (1978)
Obłoza, M.: Connections between Hyers and Lyapunov stability of the ordinary differential equations. Rocznik Nauk.-Dydakt. Prace Mat. 14, 141–146 (1997)
Jung, S.M.: Hyers–Ulam stability of the first-order matrix difference equations. Adv. Differ. Equ. 2015(1), 1 (2015)
Khan, A., Rahmat, G., Zada, A.: On uniform exponential stability and exact admissibility of discrete semigroups. Int. J. Differ. Equ. 2013, 268309 (2013)
Khusainov, D.Ya., Shuklin, G.V.: Linear autonomous time-delay system with permutation matrices solving. Stud. Univ. Žilina Math. Ser. 17(1), 101–108 (2003)
Diblík, J., Khusainov, D.Y.: Representation of solutions of discrete delayed system with commutative matrices. J. Math. Anal. Appl. 318(1), 63–76 (2006)
You, Z., JinRong, W., O’Regan, D.: Exponential stability and relative controllability of nonsingular delay systems. Bull. Braz. Math. Soc. 50(2), 457–479 (2019)
Li, T., Zada, A.: Connections between Hyers–Ulam stability and uniform exponential stability of discrete evolution families of bounded linear operators over Banach spaces. Adv. Differ. Equ. 2019(1), 1 (2016)
Shah, S.O., Zada, A., Muzammil, M., Tayyab, M., Rizwan, R.: On the Bielecki–Ulam’s type stability results of first order non-linear impulsive delay dynamic systems on time scales. Qual. Theory Dyn. Syst. 19(3), 98 (2020)
Shah, S.O., Zada, A., Hamza, A.E.: Stability analysis of the first order non-linear impulsive time varying delay dynamic system on time scales. Qual. Theory Dyn. Syst. 18(3), 825–840 (2019)
Zada, A., Pervaiz, B., Alzabut, J., Shah, S.O.: Further results on Ulam stability for a system of first-order nonsingular delay differential equations. Demonstr. Math. 53(1), 225–235 (2020)
Acknowledgements
The authors are grateful to the editor and anonymous referees for their careful review and valuable comments which helped to improve this manuscript. The authors T. Abdeljawad and A. Mukheimer would like to thank Prince Sultan University for paying the publications charges and for the support through the TAS research Lab.
Funding
The authors T. Abdeljawad and A. Mukheimer would like to thank Prince Sultan University for paying the publications charges.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the writing of this manuscript. All authors read and approved the final manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Rahmat, G., Ullah, A., Rahman, A.U. et al. Hyers–Ulam stability of non-autonomous and nonsingular delay difference equations. Adv Differ Equ 2021, 474 (2021). https://doi.org/10.1186/s13662-021-03627-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-021-03627-y