
Abstract
This paper presents theoretical results on the finite-time synchronization of delayed memristive neural networks (MNNs). Compared with existing ones on finite-time synchronization of discontinuous NNs, we directly regard the MNNs as a switching system, by introducing a novel analysis method, new synchronization criteria are established without employing differential inclusion theory and non-smooth finite time convergence theorem. Finally, we give a numerical example to support the effectiveness of the theoretical results.
Similar content being viewed by others
1 Introduction
It is well known that Chua in [1] postulated the existence of the fourth circuit element in 1971, and he named this element memristor as a contraction of memory and resistor, Chua also pointed out that the memristor can memorize its past dynamic history, such a memory characteristic makes it as a potential candidate for simulating biological synapses, and it has been shown that a simple memristive system can exhibit a plethora of complex dynamical behaviors. Until 2008, William and his research group at Hewlett-Packard Laboratory proclaimed that the fourth circuit element is realized by building a prototype of a solid-state memristor [2], since then, many efforts have been made devoted to the analysis and synthesis of memristive systems, see [3–5] and the references therein.
Especially, the so-called memristive neural networks (MNNs) are constructed by introducing resistors into artificial or biological neural networks, which greatly expand the application scope of neural networks, for example, MNNs can provide an important approach to better understand the neural processes in the human brain [3]. In addition, in the process of design and implementation of NNs, communication delays are ubiquitous in the real world owing to the finite velocity of signal switching and delivery, and it often becomes a source of some undesirable side-effects such as oscillation and divergence in a real-world network [6]. Recently, the research on the dynamics of many types of delayed MNNs has been today’s hot topics and there are many excellent works have been reported, such as [7–13] and the references therein.
Synchronization, as an important nonlinear dynamical nature, has extensive applications in practical engineering fields. Under the drive–response (or master–slave) framework proposed by Pecora and Carroll in [14], many theoretical results have been established on the synchronization of two MNNs, for example, the synchronization dynamics of kinds of delayed MNNs have been well studied, such as the global exponential synchronization [15], reliable asymptotic anti-synchronization [16], non-fragile \(H_{\infty }\) synchronization [17], projective synchronization [18], and so on. Looking through the above-mentioned literature, the trajectories of the response system can reach the trajectories of deriving system over the infinite horizon. In the application point of view, the synchronization is usually required to be realized in finite time, which is more important in some engineering processes, for instance, secure communication and artificial intelligence [19, 20]. For finite-time synchronization, it is noteworthy that the settling time depends heavily on the initial states of the system, which limits practical applications because the information of initial conditions may be hard to adjust or even impossible to estimate. To satisfy the need of fact, the fixed-time stability was originally introduced by Polyakov in [21], if it is globally finite-time stable and the settling time function is uniformly bounded for any initial values, which means that the settling or halting time is not dependent on the initial states. Nowadays, fixed-time control has been extensively applied in many areas such as power systems [22], rigid spacecraft [23], etc. According to the significant biological and engineering backgrounds of finite-time or fixed-time synchronization control, such an issue of delayed MNNs has attracted considerable attention, see [10, 24–30] and the references therein. It is noteworthy that for the majority of the aforementioned studies, a common method is based on the generalized finite-time convergence theorem under the Filippov differential inclusion theory, and the corresponding criteria are established via constructing Lyapunov (or Lyapunov–Krasovskii) functionals.
Motivated by recent works in [31, 32] and combining with the framework for studying MNNs proposed in [33], in this paper, we further study the finite-time synchronization of a basic delayed MNN model. The main contribution of this paper lies in the following aspects.
-
(1)
Different from the theoretical results on dynamics of the aforementioned delayed MNNs, in this paper, the differential inclusion theory and the nonsmooth analysis techniques are abandoned, our results complement the earlier publications.
-
(2)
Existing finite-time synchronization results on delayed MNNs are mainly based on some generalized finite-time convergence theorem (see, e.g., [10, 24, 26, 27]), in this paper, we study the finite-time synchronization without using them, the employed approach enriches the analysis method of MNNs.
-
(3)
The theoretical results established in this paper are closely related to the location of the initial error states, which presents a new viewpoint of finite-time synchronization process.
The rest of this paper is arranged as follows. In Sect. 2, the model description and some preliminary works are presented. Section 3 discusses the finite-time synchronization of the drive–response MNNs with a state feedback controller. In Sect. 4, a numerical example is given to substantiate the theoretical analysis. Finally, conclusions are drawn in Sect. 5.
2 Preliminaries
In this paper, we consider the following delayed MNN model described by Guo et al. in [33],
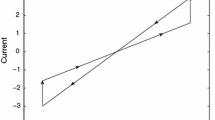
where \(x_{i}(t)\) denotes the neuron current activity level, \(d_{i}>0\) is the neuronal self-inhibition, \(f_{j}(\cdot )\), \(g_{j}(\cdot )\) are two activation functions, \(I_{i}\) stands for the input or bias, θ represents the transmission delay, and \(a_{ij}(\cdot )\) and \(b_{ij}(\cdot )\) are dependent on the variation directions of \(f_{j}(x_{j}(t))- x_{i}(t)\) and \(g_{j}(x_{j}(t-\theta ))-x_{i}(t)\) along time t, respectively. More concretely, in light of the current–voltage characteristics of memristor [33], the state-dependent parameters \(a_{ij}(\cdot )\) and \(b_{ij}(\cdot )\) can be specifically expressed as
in which \(a_{ij}^{*}\), \(a_{ij}^{**}\) and \(b_{ij}^{*}\), \(b_{ij}^{**}\) are different constants, \(D^{-}(\cdot )\) means the left upper Dini-derivation, and \(f_{ij}(t)=f_{j}(x_{j}(t))-x_{i}(t)\), \(g_{ij}(t-\theta )=f_{j}(x_{j}(t- \theta ))-x_{i}(t)\). The initial condition is equipped with \(x_{i}(t)=\varphi _{i}(t)\in C([-\theta , 0], \mathbb{R})\).
In the following, we routinely regard system (2.1) as the drive system and the corresponding response system is presented as follows:
in which \(y_{i}(t)\) stands for the state variable of the ith neuron of response system and \(\mathbb{C}_{i}(t)\) corresponds to the control input. The initial condition associated with system (2.3) is given by \(y_{i}(t)=\tilde{\varphi }_{i}(t)\in C([-\theta , 0], \mathbb{R})\).
Let us define the synchronization error function as  , and subtract (2.3) from (2.1), we obtain the following error system:
, and subtract (2.3) from (2.1), we obtain the following error system:

With regard to neural networks (2.1) and (2.3), the initial condition of system (2.4) is correspondingly given as follows,

Definition 2.1
If for a suitable designed controller and any initial state  , \(s\in [-{ \theta }, 0]\), there is a time \(\mathbb{T}(\tilde{\boldsymbol{\varphi }},{\boldsymbol{\varphi }})\) such that
, \(s\in [-{ \theta }, 0]\), there is a time \(\mathbb{T}(\tilde{\boldsymbol{\varphi }},{\boldsymbol{\varphi }})\) such that
and
Then the drive system-response systems (2.1) and (2.3) are said to achieve finite-time synchronization. The function \(\mathbb{T}\) is called the settling-time function.
Definition 2.2
If drive–response systems (2.1) and (2.3) are finite-time synchronization and the settling time function \(\mathbb{T}(\tilde{\boldsymbol{\varphi }},{\boldsymbol{\varphi }})\) is uniformly bounded, that is, there is a constant \(\mathbb{T}_{\max }>0\) such that \(\mathbb{T}(\tilde{\boldsymbol{\varphi }},{\boldsymbol{\varphi }})\leq \mathbb{T}_{ \max }\). Then the drive system (2.1) and response system (2.3) are said to achieve fixed-time synchronization.
It is easy to see from the preknowledge that the finite-time synchronization problem in this paper is converted to finite-time stability problem of (2.4). In order to achieve this objective, further assumptions on the activations are made in the following.
Assumption 2.1
The activation functions \(f_{i}(\cdot )\) and \(g_{i}(\cdot )\) satisfy globally Lipschitz conditions and are bounded, that is, there exist positive constants \(L_{i}^{f}\), \(L_{i}^{g}\) and \(M_{i}^{f}\), \(M_{i}^{g}\) such that
and
hold for all \(u, v\in \mathbb{R}\), \(i=1,2,\ldots,n\).
3 Main results
For notational convenience, in what follows we denote \(\hat{a}_{ij}=\max \{|a_{ij}^{*}|,|a_{ij}^{**}| \}\), \(\hat{b}_{ij}= \max \{|b_{ij}^{*}|, |b_{ij}^{**}| \}\), \(d_{ij}^{a}=|\max \{a_{ij}^{*}, a_{ij}^{**} \}-\min \{a_{ij}^{*}, a_{ij}^{**}\}|\), \(d_{ij}^{b}=|\max \{b_{ij}^{*}, b_{ij}^{**} \}-\min \{b_{ij}^{*}, b_{ij}^{**}\}|\), \(\tilde{k}_{\min }= \min_{1 \leq i\leq n}\{k_{i}\}\).
We are now in a position to state our main results as follows.
Theorem 3.1
Let Assumption 2.1hold, if the error system (2.4) is controlled with the control law

where the control parameters \(\alpha _{i}\), \(\beta _{i}\), \(k_{i}\)are positive constants satisfying
and
then the response system (2.3) can in finite–time synchronize with the drive system (2.1).
In order to prove the main results, we first establish the following two lemmas.
Lemma 3.2
Let Assumption 2.1hold and conditions (3.1) and (3.2) be satisfied. Then, for each  of system (2.4) with
of system (2.4) with  , it would finite–timely cross the hyperplane with
, it would finite–timely cross the hyperplane with  .
.
Proof
Observe from (3.1), (3.2) and \(0<\mu <1\) that
and
Firstly, we obtain from the continuity argument and (3.1) that there exists a sufficiently small ε satisfying
Set

One can easily see that  , \(i=1,2,\ldots,n\), and we shall discuss it into the following two cases:
, \(i=1,2,\ldots,n\), and we shall discuss it into the following two cases:
Case I:  , \(i=1,2,\ldots,n\). We know from the continuity argument that there exists a constant \(\sigma >0\) such that
, \(i=1,2,\ldots,n\). We know from the continuity argument that there exists a constant \(\sigma >0\) such that  , \(i=1,2,\ldots,n\), and
, \(i=1,2,\ldots,n\), and  , for \(s\in (t, t+\sigma )\).
, for \(s\in (t, t+\sigma )\).
Case II: If there exists an index \(i_{0}\) and a time \(t_{0}\geq 0\) such that  , then we have
, then we have

Note from

that

Then we deduce from (3.4), (3.5) and (3.6) that

Therefore, there must exist a constant \(\sigma >0\) such that  , and
, and  , for \(s\in (t_{0}, t_{0}+\sigma )\).
, for \(s\in (t_{0}, t_{0}+\sigma )\).
We conclude from the above two cases that  is non-increasing and
is non-increasing and  , \(t\geq 0\), which means that
, \(t\geq 0\), which means that

Therefore, as time t increases, \(\sup_{t-\theta \leq s\leq t} (\max_{i=1,2,\ldots,n}|e_{i}(s)| )\) would be less than 1. Denote the first time satisfying \(\sup_{t-\theta \leq s\leq t} (\max_{i=1,2,\ldots,n}|e_{i}(s)| )=1\) as \(\mathbb{T}_{1}\), then we have

That is to say, every error function  would cross the hyperplane
would cross the hyperplane
and the time it takes is no more than \(\mathbb{T}_{1}\). The proof of Lemma 3.2 is complete. □
Lemma 3.3
Let Assumption 2.1and conditions (3.1)–(3.2) be satisfied, if
and
hold for all \(i=1,2,\ldots,n\), then for each  of system (2.4) with
of system (2.4) with

would fixed–timely flow to 0.
Proof
Define

It is easy to see that

and if there exist an index \(i_{1}\) and a time \(t_{1}\geq 0\) such that  , then one has
, then one has

Notice that

Elementary calculation from (3.9) produces

which, together with (3.8), leads to

which means that there exists some \(\varsigma >0\) such that  holds for all \(s\in (t_{1}, t_{1}+\varsigma )\).
holds for all \(s\in (t_{1}, t_{1}+\varsigma )\).
Therefore, we obtain from the above discussions that

which reduces to

and hence one can easily deduce that, as time t increases,  would flow to 0. Denote \(\mathbb{T}_{2}\) as the time such that
would flow to 0. Denote \(\mathbb{T}_{2}\) as the time such that  , we then have
, we then have

which implies that the time–taken for each  from 1 to 0 is no more than \(\frac{1}{\tilde{k}_{\min }(1-\mu )}\), \(i=1,2,\ldots,n\). The proof of Lemma 3.3 is complete. □
from 1 to 0 is no more than \(\frac{1}{\tilde{k}_{\min }(1-\mu )}\), \(i=1,2,\ldots,n\). The proof of Lemma 3.3 is complete. □
Based on Lemmas 3.2 and 3.3, we are ready to prove Theorem 3.1.
Proof of Theorem 3.1
For every solution  of error system (2.4), we treat it into two cases according to the location of initial error function:
of error system (2.4), we treat it into two cases according to the location of initial error function:
Case I:  .
.
In this case, we obtain from Lemma 3.3 that each error state component \(e_{i}(t)\), \(i=1,2,\ldots,n\), would flow to 0, and the time–taken is no more than \(\frac{1}{\tilde{k}_{\min }(1-\mu )}\). In other words, the drive–response system (2.1) and (2.3) under control law (3.1) achieve fixed-time synchronization.
Case II:  .
.
In this case, we conclude from Lemma 3.2 that  would flow to 1 with a finite time, which is no more than
would flow to 1 with a finite time, which is no more than  , and then in a similar manner to that carried out in Lemma 3.3, we see that each
, and then in a similar manner to that carried out in Lemma 3.3, we see that each  would continue to flow 0 in fixed time, which is no more than \(\frac{1}{\tilde{k}_{\min }(1-\mu )}\). In short, as time t increases, each \(e_{i}(t)\) would finally achieve 0 in finite time \(\mathbb{T}_{\mathrm{total}}\) with
would continue to flow 0 in fixed time, which is no more than \(\frac{1}{\tilde{k}_{\min }(1-\mu )}\). In short, as time t increases, each \(e_{i}(t)\) would finally achieve 0 in finite time \(\mathbb{T}_{\mathrm{total}}\) with  . □
. □
Remark 3.1
The proof of the previous results provides a new perspective for better understanding the finite-time synchronization of MNNs. That is to say, if the absolute value of initial error function is less than or equal to 1, then each error function will achieve 0 in a fixed time; if the absolute value of initial error function is greater than 1, then each error function will firstly from the initial function to 1 in a finite time, and then further reach 0 in a fixed time. When the control parameter \(\mu >1\), whether there is such a mechanism process to realize fixed-time synchronization is another issue worth studying and discussing.
Remark 3.2
With the differential inclusion theory and nonsmooth finite (or fixed)-time convergence theorem, the researchers studied the finite (or fixed)-time synchronization of MNNs (see, e.g., [10, 24, 26, 27] and the references therein). Different from the method employed in those works, in this paper, we directly study the finite-time synchronization of the delayed MNNs (2.1) without using the theory of differential equations with discontinuous right-hand sides. Therefore, the theoretical results established in this paper enrich the already existing finite-time synchronization methods.
Remark 3.3
Different from some existing finite-time controllers with time delays in such as [24, 30, 34], the designed control law in Theorem 3.1 depends only on the current states at time t, it does not involve any information on the past states, which is much easier to be verified and realized in practice. Therefore, the designed finite-time control scheme is some less conservative. On the other hand, to realize the finite-time synchronization of discontinuous NNs, some useful Lyapunov functions or Lyapunov–Krasovskii functions are constructed based on the nonsmooth finite-time convergence theorem together differential inequality techniques; see, e.g., [20, 28, 30, 34]. In this paper, we investigate the finite-time synchronization problem of the considered delayed system by some mathematical analysis techniques via constructing different Lyapunov functions.
4 Numerical simulations
In this section, we will present a numerical example to illustrate the obtained theoretical results. For convenience, we denote \(f_{ij}(t)=a_{j}(x_{j}(t))-x_{i}(t)\) and \(g_{ij}(t-\theta )=b_{j}(x_{j}(t-\theta ))-x_{i}(t)\).
Example 4.1
Consider a two-neuron memristive neural network model as follows:
where
and
We can verify that the activation functions satisfy Assumption 2.1 with \(L_{i}^{f}=L_{i}^{g}=1\), \(M_{i}^{f}=M_{i}^{g}=1\). Moreover, the response system is described by
where the activation functions and system parameters are the same as that in system (4.1), and the controllers are designed as follows:

It follows from simple computations that conditions (3.1) and (3.2) are satisfied. Therefore, we conclude from Theorem 3.1 that the finite-time synchronization between system (4.1) and system (4.2) is achieved. Figures 1–2 show the simulation results with the initial conditions \(x_{1}(s)=8.5\), \(x_{2}(s)=-2.5\), \(y_{1}(s)=4.5\), \(y_{2}(s)=3.4\), \(s\in [-4.5, 0]\). Specifically, Fig. 1 shows the trajectories of the state evolution of system (4.1) and system (4.2), we can observe that the state of networks (4.2) in finite time synchronizes with system (4.1). Figure 2 shows the finite-time synchronization between system (4.1) and system (4.2), it is readily seen that the state evolution error approaches zero quickly as time goes.

Time behaviors of state variables in \(x_{i}(t)\), \(y_{i}(t)\) of MNNs (4.1), \(i=1,2\)

The synchronization errors between the drive–response systems in Example 4.1
5 Conclusion
This paper performed a finite-time synchronization analysis of delayed MNNs based on the previous works [31–33]. Different from the existing works, we turn to the synchronization analysis by discussing the MNNs directly. Some new criteria ensuring finite-time synchronization of delayed MNNs were established by designing the suitable controller and constructing some novel Lyapunov functions. It is worth mentioning that the presented methodology herein without employing the differential inclusion theory and nonsmooth finite time convergence theorem, which are usually used to handle the finite-time synchronization problem. Finally, a numerical example is presented to substantiate the results. The future work will focus on the investigation of the finite-time synchronization of MNNs with mixed time-varying delays or leakage delays or impulse disturbance.
References
Chua, L.O.: Memristor—the missing circuit element. IEEE Trans. Circuit Theory 18(5), 507–519 (1971)
Strukov, D., Snider, G., Stewart, D., Williams, R.: The missing memristor found. Nature 453, 80–83 (2008)
Pershin, Y., Ventra, M.: Experimental demonstration of associative memory with memristive neural networks. Neural Netw. 23(7), 881–886 (2010)
Huang, C., Yang, Z., Yi, T., Zou, X.: On the basins of attraction for a class of delay differential equations with non-monotone bistable nonlinearities. J. Differ. Equ. 256(7), 2101–2114 (2014)
Duan, L., Huang, L.: Periodicity and dissipativity for memristor-based mixed time-varying delayed neural networks via differential inclusions. Neural Netw. 57, 12–22 (2014)
Cortés, J.: Finite-time convergent gradient flows with applications to network consensus. Automatica 42, 1993–2000 (2006)
Wu, A., Zeng, Z.: Exponential stabilization of memristive neural networks with time delays. IEEE Trans. Neural Netw. Learn. Syst. 23(12), 1919–1929 (2012)
Duan, L., Huang, L., Guo, Z., Fang, X.: Periodic attractor for reaction–diffusion high-order Hopfield neural networks with time-varying delays. Comput. Math. Appl. 73(2), 233–245 (2017)
Pham, V., Jafari, S., Vaidyanathan, S., et al.: A novel memristive neural network with hidden attractors and its circuitry implementation. Sci. China, Technol. Sci. 59(3), 358–363 (2016)
Cao, J., Li, R.: Fixed-time synchronization of delayed memristor-based recurrent neural networks. Sci. China Inf. Sci. 60, 032201 (2017)
Huang, C., Guo, Z., Yang, Z., Chen, Y.: Dynamics of delay differential equations with their applications. Abstr. Appl. Anal. 2013, 467890 (2013)
Huang, C., Long, X., Cao, J.: Stability of antiperiodic recurrent neural networks with multiproportional delays. Math. Methods Appl. Sci. 43(9), 6093–6102 (2020)
Chen, D., Zhang, W., Cao, J., Huang, C.: Fixed time synchronization of delayed quaternion-valued memristor-based neural networks. Adv. Differ. Equ. 2020, 92 (2020)
Pecora, L.M., Carroll, T.L.: Synchronization in chaotic systems. Phys. Rev. Lett. 64, 821–824 (1990)
Yang, X., Cao, J., Liang, J.: Exponential synchronization of memristive neural networks with delays: interval matrix method. IEEE Trans. Neural Netw. Learn. Syst. 28(8), 1878–1888 (2016)
Sakthivel, R., Anbuvithya, R., et al.: Reliable anti-synchronization conditions for BAM memristive neural networks with different memductance functions. Appl. Math. Comput. 275, 213–228 (2016)
Mathiyalagan, K., Anbuvithya, R., et al.: Non-fragile \(H_{\infty }\) synchronization of memristor-based neural networks using passivity theory. Neural Netw. 74, 85–100 (2016)
Bao, H., Cao, J.: Projective synchronization of fractional-order memristor-based neural networks. Neural Netw. 63, 1–9 (2015)
Yang, X., Song, Q., et al.: Finite-time synchronization of coupled discontinuous neural networks with mixed delays and nonidentical perturbations. J. Franklin Inst. 352, 4382–4406 (2015)
Duan, L., Wei, H., Huang, L.: Finite-time synchronization of delayed fuzzy cellular neural networks with discontinuous activations. Fuzzy Sets Syst. 361, 56–70 (2019)
Polyakov, A.: Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 57, 2106–2110 (2012)
Ni, J., Liu, L., Liu, C., Hu, X., Li, S.: Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system. IEEE Trans. Circuits Syst. II, Express Briefs 64(2), 151–155 (2016)
Jiang, B., Hu, Q., Friswell, M.I.: Fixed-time attitude control for rigid spacecraft with actuator saturation and faults. IEEE Trans. Control Syst. Technol. 24, 1892–1898 (2016)
Abdurahman, A., Jiang, H., Teng, Z.: Finite-time synchronization for memristor-based neural networks with time-varying delays. Neural Netw. 69, 20–28 (2015)
Duan, L., Xu, Z.: A note on the dynamics analysis of a diffusive cholera epidemic model with nonlinear incidence rate. Appl. Math. Lett. 106, 106356 (2020)
Jiang, M., Wang, S., Mei, J., et al.: Finite-time synchronization control of a class of memristor-based recurrent neural networks. Neural Netw. 63, 133–140 (2015)
Chen, C., Li, L., Peng, H., et al.: Fixed-time synchronization of memristor-based BAM neural networks with time-varying discrete delay. Neural Netw. 96, 47–54 (2017)
Chen, C., Li, L., et al.: Finite-time synchronization of memristor-based neural networks with mixed delays. Neurocomputing 235, 83–89 (2017)
Huang, C., Zhang, H.: Periodicity of non-autonomous inertial neural networks involving proportional delays and non-reduced order method. Int. J. Biomath. 12(2), 1950016 (2019)
Duan, L., Shi, M., Huang, L.: New results on finite-/fixed-time synchronization of delayed diffusive fuzzy HNNs with discontinuous activations. Fuzzy Sets Syst. (2020). https://doi.org/10.1016/j.fss.2020.04.016
Lu, W., Liu, X., Chen, T.: A note on finite-time and fixed-time stability. Neural Netw. 81, 11–15 (2016)
Wang, L., Chen, T.: Finite-time anti-synchronization of neural networks with time-varying delays. Neurocomputing 275, 1595–1600 (2018)
Guo, Z., Wang, J., Yan, Z.: Attractivity analysis of memristor-based cellular neural networks with time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. 25, 704–717 (2014)
Liu, M., Jiang, H., Hu, C.: Finite-time synchronization of memristor-based Cohen–Grossberg neural networks with time-varying delays. Neurocomputing 194, 1–9 (2016)
Acknowledgements
The authors are thankful to the editor and anonymous reviewers for their insightful comments and suggestions, which strengthened our manuscript.
Availability of data and materials
Not applicable.
Funding
This work was jointly supported by the National Natural Science Foundation of China (11801008), Key Program of University Natural Science Research Fund of Anhui Province (KJ2018A0082), Key Program of Scientific Research Fund for Young Teachers of AUST (QN2017209).
Author information
Authors and Affiliations
Contributions
The authors carried out the proofs of the main results and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ren, D., Yao, A. New finite-time synchronization analysis of a delayed memristive neurodynamic model. Adv Differ Equ 2020, 478 (2020). https://doi.org/10.1186/s13662-020-02929-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-020-02929-x