
Abstract
The synchronization problem for a class of fractional-order complex dynamical networks with and without time-varying delay is investigated in this paper. By utilizing generalized Barbalat’s lemma, Razumikhin-type stability theory and matrix inequality technique, some sufficient criteria ensuring synchronization under pinning control and pinning adaptive feedback control are derived. Finally, three numerical simulations are presented to demonstrate the effectiveness of the obtained results.
Similar content being viewed by others


1 Introduction
In the past decade, many researchers have drawn increasing attention to dynamical analysis of complex dynamical networks due to a variety of their application fields, such as biology, physics, mathematics, sociology and so on [1–6]. On the basis of complex network models, the complex dynamical networks have been extensively investigated, especially in the interaction between the overall structure and complexity, and the local dynamical properties of the coupled nodes. A complex network is usually composed of a set of coupled interconnected nodes, and each of node states is a dynamical system.
Note that fractional calculus, governed by fractional derivative and integral, has become a focal research topic in many fields such as dielectric polarization, engineering optimization, electromagnetic wave and so on [7, 8]. These research efforts have shown that, compared with integer calculus, fractional calculus has a greater advantage in describing the memory and hereditary properties of manifold material and processes, and fractional calculus has plenty of freedom when we simulate real-world problems. In recent years, there has been a great deal of work to study fractional-order systems in dynamics and control [9–11]. In the real world, the complex networks are composed of a large number of interconnected fractional-order dynamical units; therefore, it is necessary to investigate fractional-order complex dynamical networks.
Synchronization, as one of the most important collective behaviors in complex dynamic networks, has been extensively studied [12–16]. Synchronization in complex networks plays a significant role in the fields of signal generator, image processing, engineering, etc. It is well known that synchronization of fractional-order complex dynamical networks has become an important research field [17–19]. Yang et al. [17] investigated the out synchronization with two complex dynamical networks of fractional-order chaotic nodes. Wong et al. [18] addressed the robust synchronization of coupled fractional-order complex dynamical networks with parametric uncertainties. The hybrid synchronization problem of coupled fractional-order complex networks was investigated in [19].
As is well known, various control techniques, such as pinning control [20], impulsive control [21], adaptive control [22], intermittent control [23] and observer-based control [24], have been adopted to realize synchronization. But in the real world, it is too costly and impractical if all of the nodes in the network are controlled. However, many existing works show that we can synchronize the whole network by using pinning control [25–30]. Li et al. [25] provided several low-dimensional criteria for the synchronization of fractional-order complex dynamical networks with periodically intermittent pinning control. Wang et al. [26] showed that pinning synchronization problem of fractional-order complex networks can also deal with Lipschitz-type nonlinear nodes and directed communication topology. The advantage of adaptive control is that the control parameter can be adaptively adjusted according to the appropriate update law, and adaptive pinning control method has been widely used to synchronize coupled fractional-order dynamical networks. For instance, Chai et al. [27] investigated the synchronization of fractional-order complex networks via adaptive pinning control. The problem about cluster synchronization of fractional-order complex dynamical networks was studied via adaptive pinning control in [28]. However, few people studied a synchronization problem of fractional-order complex dynamical networks with and without time-varying delay via pinning and adaptive control. Thus, it is very significant to further study the synchronization of fractional-order complex dynamical networks by utilizing pinning adaptive control strategy.
Motivated by the above discussions, this paper will investigate the synchronization of fractional-order complex dynamical networks with and without time-varying delay via pinning and adaptive control. We establish some sufficient conditions to guarantee the synchronization of fractional-order complex dynamical networks with and without time-varying delay by using the pinning state feedback controller. In addition, we design adaptive control to adjust coupling strength designed for fractional-order complex dynamical networks with directed topologies. There are two adaptive plans for updating the feedback gains such that delayed fractional-order complex dynamical networks with directed topologies under the designed pinning controllers are synchronized. Moreover, the obtained results can be used to achieve anti-synchronization and complete synchronization. Compared with [29], the results in the paper are less conservative and more general.
This paper is composed as follows. Section 2 describes some preliminaries. Main results are presented in Sections 3 and 4. Three numerical examples are given in Section 5. Finally, conclusions are drawn in Section 6.
2 Preliminaries and model description
2.1 Preliminaries about fractional-order calculus
In the following, we will introduce some notations and definitions.
The superscript T represents the transpose. \(\mathbb{R}^{n}\) denotes the n-dimensional Euclidean space. \(\mathbb{R}^{n\times n}\) is the set of \(n\times n\) real matrices. The matrix \(0< P\in\mathbb{R}^{n\times n}\) or \(0>P\in\mathbb{R}^{n\times n}\) means P is symmetric and positive definite or negative definite. \(A\otimes B\) represents the Kronecker product of matrices A and B. For any matrix A, \(\lambda_{\max}(A)\) and \(\lambda_{\min}(A)\) denote the largest eigenvalue and the smallest one of the matrix, respectively.
2.2 Definitions and lemmas
In this subsection, some useful definitions and lemmas are given.
Definition 2.1
([7])
\(\Gamma(\cdot)\) denotes the gamma function. The Caputo fractional derivative of order \(\alpha>0\) for a function \(\mathscr{F}(t)\) is defined as
where \(n-1<\alpha<n\), \(n\in\mathbb{Z}^{+}\).
Definition 2.2
([7])
The fractional integral of order α for a function \(\mathscr{F}(t)\) is defined as
Definition 2.3
([31])
The matrix \(\mathscr{A}\) of order n is called reducible if there is a permutation matrix \(\mathscr{B}\in\mathbb{R}^{n\times n}\) satisfying
where \(\mathscr{A}_{1}\) and \(\mathscr{A}_{2}\) are square matrices of order at least one. If \(\mathscr{A}\) is not reducible, \(\mathscr{A}\) is called irreducible.
Lemma 2.1
([31])
Suppose that \(\mathscr{L}=(\mathscr{L}_{ij})_{N\times N}\)(\(N>2\)) is an irreducible matrix, where
then there exists a diagonal matrix \(0<\mathscr{K}=\operatorname{diag}(K_{1},K_{2},\ldots,K_{N})\in P^{N\times N}\) such that
Lemma 2.2
([32])
Suppose that \(\mathscr{A}\) is an n order matrix, then there exist \(\mathscr{B}\in\mathbb{R}^{n\times n}\) and an integer \(r\geq1\) satisfying
where \(\mathscr{A}_{1}\), \(\mathscr{A}_{2}\), … , \(\mathscr{A}\) are square irreducible matrices. The matrices \(\mathscr{A}_{1}\), \(\mathscr{A}_{2}\), … , \(\mathscr{A}_{r}\) that occur as diagonal blocks are uniquely determined within simultaneous permutation of their lines, but their ordering is not necessarily unique.
This form is called the Frobenius normal form of the square matrix \(\mathscr{A}\).
Lemma 2.3
([33])
Suppose that the function \(g(t)\) is nondecreasing and differential on \(t\in[t_{0},+\infty)\), and then, for any constant h and \(t\in[t_{0},+\infty)\),
where \(0<\alpha<1\).
Lemma 2.4
([34])
Let \(x(t)\in\mathbb{R}^{n}\) be a continuous and derivable vector-valued function. Then, for any \(t\geq t_{0}\),
where \(P\in\mathbb{R}^{n\times n}\) is a symmetric positive definite matrix, \(\alpha\in(0,1)\).
Lemma 2.5
([35])
For any vector \(x,y\in\mathbb{R}^{n}\), scalar \(\epsilon>0\) and positive definite matrix \(Q\in\mathbb{R}^{n\times n}\), the following inequality holds:
3 Pinning synchronization of fractional-order complex dynamical networks
In this section, we consider coupled complex dynamical networks consisting of N identical nodes, which is described as follows:
where \(N\geq2\) is the number of subnetworks. \(x_{i}(t)=(x_{i1}(t),x_{i2}(t),\ldots,x_{in}(t))^{T}\in\mathbb{R}^{n}\) denotes the state vector of the ith nodes. \(A=\operatorname{diag}\{a_{1},a_{2}, \ldots,a_{n}\}>0\). \(B=(b_{pq})_{n\times n}\) (\(p,q=1,2,\ldots,n\)) is the connection weight matrix, respectively. \(f_{i}(x_{i}(t))= (f_{i1}(x_{i1}(t)),f_{i2}(x_{i1}(t)),\ldots, f_{in}(x_{in}(t)) )^{T}\). \(c>0\) represents the overall coupling strength. \(G=(G_{ij})_{N\times N}\) is the coupling matrix, which is defined as follows: if there is a link from node j to node i, then \(G_{ij}>0\); otherwise \(G_{ij}=0\), the diagonal elements are defined as \(G_{ii}=-\sum_{j=1,j\neq i}^{N}G_{ij}\). \(0<\Gamma\in\mathbb{R}^{n\times n}\) stands for an inner coupling matrix. \(J=(J_{1},J_{2},\ldots,J_{N})\) is a constant external input vector.
Assumption 3.1
In this paper, the function \(f_{j}(\cdot)\) (\(j=1,2,\ldots,n\)) is continuous, and there exist \(\Pi_{i}>0\). For any vectors \(\varepsilon_{1},\varepsilon_{2}\in \mathbb{R}\), we have
The desired trajectory of \(s(t)\) satisfies
We design the proper controller \(u_{i}(t)\) to make system (1) synchronized to \(s(t)\), that is,
As we all know, coupled complex dynamical network (1) cannot achieve synchronization by itself. In this section, some controllers should be used to control partial nodes for realizing synchronization. Hence, the pinning control can be presented as follows:
where \(\mathcal{C}=\{l_{1},l_{2},\ldots,l_{m}\}\) and \(l_{i}\) (\(i=1,2,\ldots,m\), \(1\leq m< N\)) are controlled nodes. \(k_{i}>0\) represents feedback gains.
Under controller (3), system (1) can be rewritten as
where \(i=1,2,\ldots,N\), \(K=\operatorname{diag}(\hat{k}_{1},\hat{k}_{2},\ldots,\hat {k}_{N})=\operatorname{diag}(0,\ldots,0,\underbrace{k_{1}}_{l_{1}},0,\ldots,0,\underbrace{k_{2}}_{l_{2}}, 0,\ldots,0, [4] \underbrace{k_{r}}_{l_{m}},\ldots)\).
Define the error signal \(e_{i}(t)=x_{i}(t)-s(t)\), \(i=1,2,\ldots,N\). Then we can obtain
where \(m=1,2,\ldots,N\), \(\hat{G}=(\hat{G}_{ij})_{N\times N}=G-K\).
Suppose that Ĝ is in the Frobenius normal form, that is,
where \(\bar{G}_{1}\in\mathbb{R}^{p_{1}\times p_{1}}\), \(\bar{G}_{2}\in\mathbb{R}^{p_{2}\times p_{2}}\), … , \(\bar{G}_{r}\in\mathbb{R}^{p_{r}\times p_{r}}\) are square irreducible matrices.
Denote
Then system (1) can be transformed as
where \(i=1,2,\ldots,r\).
Lemma 3.1
([36])
Let f be a nonnegative uniformly continuous function. If for all \(t\geq0\), \(I_{0}^{\alpha}f(t)< C\) with C a positive constant, then f converges to zero.
Lemma 3.2
([10])
If the Caputo fractional derivative \(D_{t_{0},t}^{\alpha}\mathscr{F}(t)\) is integrable, then
When \(0<\alpha<1\), one can obtain
3.1 Fixed coupled strength
Theorem 3.1
If there exist matrices \(0< P_{i}=\operatorname{diag}(P_{i1},P_{i2},\ldots,P_{ip_{i}})\in\mathbb {R}^{p_{i}\times p_{i}}\) and a positive scalar \(\lambda_{1}>0\) such that
where \(P=\operatorname{diag}(P_{1},P_{2},\ldots,P_{r})\), \(\Xi=\operatorname{diag}(\Pi_{1}^{2},\Pi_{2}^{2},\ldots,\Pi_{n}^{2})\), then system (1) can achieve synchronization.
Proof
Let us consider the function \(V_{1}(t)=\sum_{i=1}^{r}\hat{e}_{i}^{T}(t)(P_{i}\otimes I_{n})\hat{e}_{i}(t)\).
From Lemmas 2.3 and 2.4, we can obtain
That is,
Let \(Q(t)=\lambda_{1}V_{1}(t)\), we divide \([t_{0},t)\) into ι intervals \([t_{0},t)=[t_{0},t_{1})\cup[t_{1},t_{2})\cup\cdots\cup[t_{\iota},t)\).
From Definition 2.1, Definition 2.2 and Lemma 3.2, we have
From Lemma 3.1 and Lemma 7 in [37], we have \(\lim_{t\rightarrow\infty}I_{t_{0},t}^{\alpha}Q(t)\) is bounded, that is, \(\lim_{t\rightarrow\infty}\|e(t)\|=0\), then system (4) can achieve synchronization. The proof is completed. □
3.2 Adaptive coupled strength
In this part, the main work is to solve the synchronization problem of system (4) by updating the coupled strength. Now, we design a suitable adaptive controller:
where \(0<\beta_{1}\in\mathbb{R}\).
Combining system (6) with adaptive law (11), we have
Theorem 3.2
If there exist matrices \(0< P_{i}=\operatorname{diag}(P_{i1},P_{i2},\ldots,P_{ip_{i}})\in\mathbb {R}^{p_{i}\otimes p_{i}}\) and positive scalars \(\delta_{1}>0\) such that
where \(P=\operatorname{diag}(P_{1},P_{2},\ldots,P_{r})\), then (12) can achieve synchronization under adaptive law (11).
Proof
Define the following function: \(V_{2}(t)=\sum_{i=1}^{r}\hat{e}_{i}^{T}(t)(P_{i}\otimes I_{n})\hat{e}_{i}(t)+\frac{\delta_{1}}{2\beta_{1}}(c(t)-c^{*})^{2}\).
From Lemmas 2.3 and 2.4, we can get
We know that \(c(t_{0})>0\) and \(c(t)\) is monotonically increasing, then we can obtain \(c(t)>0\). According to (13), we have
By setting \(c^{*}\) large enough such that
we have
From Definition 2.2 and (15), we can get
Hence \(V_{2}(t)\leq V_{2}(t_{0})\), we can conclude that \(\Vert \hat{e}_{i}(t) \Vert \) (\(i=1,2,\ldots,r\)) and \(c(t)\) are bounded on \(t\geq{t_{0}}\). Let \(U(t)=x^{T}(t)x(t)\). From the definition of \(V_{2}(t)\), we can conclude that \(\Vert x(t) \Vert \) and \(c(t)\) are bounded on \(t\geq{t_{0}}\). Therefore, there exists a positive constant M satisfying
Next, we will prove \(U(t)\) is uniformly continuous. For \(0\leq\mathcal{T}_{1}<\mathcal{T}_{2}\), we have
where \(\vert\mathcal{T}_{2}-\mathcal {T}_{1}\vert<\Delta(\hat{\varepsilon})= (\frac{\hat{\varepsilon }\Gamma(\alpha+1)}{2M} )^{\frac{1}{\alpha}}\). Then \(U(t)\) is uniformly continuous by the definition of uniform continuity. From Lemma 3.1, we obtain \(\lim_{t\rightarrow\infty}U(t)=0\); obviously, \(\lim_{t\rightarrow\infty} \Vert e(t) \Vert =0\), that is, system (12) can achieve synchronization under adaptive law (11). The proof is completed. □
4 Pinning synchronization of complex dynamical networks with time-varying delay
In this section, we will consider the following complex dynamical networks with time-varying delay:
where \(i=1,2,\ldots,N\), \(N\geq2\), \(x_{i}(t)=(x_{i1}(t),x_{i2}(t),\ldots,x_{in}(t))^{T}\in\mathbb{R}^{n}\) denotes the state vector of the ith nodes. \(A=\operatorname{diag}\{a_{1},a_{2}, \ldots,a_{n}\}>0\). \(B=(b_{pq})_{n\times n}\) (\(p,q=1,2,\ldots,n\)) is the connection weight matrix, respectively. \(f_{i}(x_{i}(t))= (f_{i1}(x_{i1}(t)),f_{i2}(x_{i1}(t)),\ldots,f_{in}(x_{in}(t)) )^{T}\). \(c>0\) represents the overall coupling strength. \(G=(G_{ij})_{N\times N}\) is the coupling matrix, which is defined as follows: if there is a link from node j to node i, then \(G_{ij}>0\); otherwise \(G_{ij}=0\), the diagonal elements are defined as \(G_{ii}=-\sum_{j=1,j\neq i}^{N}G_{ij}\). \(0<\Gamma\in\mathbb{R}^{n\times n}\) stands for an inner coupling matrix. \(J=(J_{1},J_{2},\ldots,J_{N})\) is a constant external input vector. \(\tau(t)\) stands for the transmission delay with \(0\leq\tau(t)\leq\tau\).
In the following, some controllers should be used to control partial nodes for realizing synchronization. Hence, the pinning control can be presented as follows:
where \(\mathcal{C}=\{l_{1},l_{2},\ldots,l_{m}\}\) and \(l_{i}\) (\(i=1,2,\ldots,m\), \(1\leq m< N\)) are controlled nodes. \(k_{i}>0\) represents feedback gains.
Under controller (18), system (17) can be rewritten as
where \(i=1,2,\ldots,N\), \(N\geq2\), \(K=\operatorname{diag}(\hat{k}_{1},\hat{k}_{2},\ldots,\hat {k}_{N})=\operatorname{diag}(0,\ldots,0,\underbrace{k_{1}}_{l_{1}},0,\ldots, 0,\underbrace{k_{2}}_{l_{2}},0,\ldots, [4]0,\underbrace{k_{m}}_{l_{m}},\ldots)\).
Let \(e_{i}(t)=x_{i}(t)-s(t)\), we have
where \(i=1,2,\ldots,N\).
Lemma 4.1
([38])
The Caputo fractional-order differential system
where \(x\in\mathbb{R}^{n}\), \(0<\alpha<1\). Suppose that \(w_{1}(s)\), \(w_{2}(s)\) are continuous nondecreasing functions, \(w_{1}(s)\) and \(w_{2}(s)\) are positive for \(s>0\) and \(w_{1}(0)=w_{2}(0)\), \(w_{2}\) is strictly increasing. If there exists a continuously differentiable function \(V:\mathbb{R}\times\mathbb{R}^{n}\rightarrow\mathbb{R}\) such that \(w_{1}( \Vert x \Vert )\leq V(t,x)\leq w_{2}( \Vert x \Vert )\) for \(t\in\mathbb{R}\), \(x\in\mathbb{R}^{n}\). Besides this, there exist two constants \(p,q>0\) with \(p< q\), so that
for \(t\geq0\). Then system \(D_{t_{0},t}^{\alpha}x(t)=f(t,x(t),x(t-\tau(t)))\) is globally uniformly asymptotically stable.
Assume
where \(\tilde{G}_{1}\in\mathbb{R}^{p_{1}\times p_{1}}\), \(\tilde{G}_{2}\in\mathbb{R}^{p_{2}\times p_{2}}\), … , \(\tilde{G}_{r}\in\mathbb{R}^{p_{r}\times p_{r}}\) are square irreducible matrices, then system (20) can be rewritten as
where \(i=1,2,\ldots,m\), the initial value of (21) is given by \(\hat{e}_{i}(s)=\hat{\Phi}_{i}(s)\),
4.1 Fixed feedback gains
Theorem 4.1
If there exist matrices \(0<\Sigma_{1}\in\mathbb{R}^{n\times n}\), \(0< P_{i}\in\mathbb{R}^{n\times n}\) satisfying
where \(P=\operatorname{diag}(P_{1},P_{2},\ldots,P_{r})\), \(\sigma_{1}=\frac{\lambda_{\min(H)}}{\xi_{2}}\), \(\sigma_{2}=\frac{\lambda_{\max}(T)}{\xi_{1}}\), \(\sigma_{1}\sigma_{2}>0\), then system (19) can achieve synchronization.
Proof
Define the following function for system (21):
From Lemmas 2.3 and 2.4, we can get
From Lemma 2.5, we can obtain
Therefore
where
From the definition of \(V(t)\), we get
where \(\xi_{1}=\min_{i=1,2,\ldots,r}\{\lambda_{\min}(P_{i})\}\), \(\xi_{2}=\min_{i=1,2,\ldots,r}\{\lambda_{\max}(P_{i})\}\), then
Let \(\sigma_{1}=\frac{\lambda_{\min}(H)}{\xi_{2}}\), \(\sigma_{2}=\frac{\lambda_{\max}(T)}{\xi_{1}}\), then
Thus, we can obtain
From Lemma 4.1, error system (20) will be globally uniformly asymptotically stable. Thus, the error \(e(t)\) will converge to zero asymptotically, which means that (19) can achieve synchronization. □
4.2 Adaptive feedback gains
In the following, we will turn the feedback gains and propose a new synchronization criterion to realize the synchronization of system (19).
Design the following pinning controllers:
where \(\mathcal{C}=\{l_{1},l_{2},\ldots,l_{m}\}\), and \(l_{i}(i=1,2,\ldots,m)\) (\(1\leq m< N\)) are controlled nodes. Then we can get
where \(i=1,2,\ldots,N\).
where \(i=1,2,\ldots,m\), the initial value of (28) is given by \(\hat{e}_{i}(s)=\hat{\phi}_{i}(s)\),
Theorem 4.2
If there exist matrices \(0< P_{i}=\operatorname{diag}(P_{i1},P_{i2},\ldots,P_{ip_{i}})\in\mathbb {R}^{p_{i}\times p_{i}}\), \(0<\Sigma_{2}\in\mathbb{R}^{n\times n}\), \(0<\Sigma_{3}\in\mathbb{R}^{n\times n}\) \(k_{i}^{*}=\operatorname{diag}(k_{i1}^{*},k_{i2}^{*},\ldots,k_{ip_{i}}^{*})\geq0\), \(i=1,2,\ldots,r\), satisfying
where \(P=\operatorname{diag}(P_{1},P_{2},\ldots,P_{r})\), \(k^{*}=\operatorname{diag}(k_{1}^{*},k_{2}^{*},\ldots,k_{r}^{*})\), \(k_{ij}^{*}=0\) (\(j=1,2,\ldots,p_{i}\)) if and only if \(K_{ij}(t)=0\). Then the pinning controlled network (27) can achieve synchronization under the following adaptive law:
where \(\beta_{2}>0\).
Proof
Define the following function for system (27):
From Lemmas 2.3 and 2.4, we can get
That is,
Then, similar to the proof of Theorem 3.2, we can conclude that system (27) can achieve synchronization. The proof is completed. □
Remark 4.1
In recent years, the synchronization of coupled fractional-order complex dynamical networks has been regarded as a popular topic in the scientific research because of its wide application in different fields. But very few authors have discussed adjusting the feedback gains and coupling strength. In [30], by the comparison principle, the synchronization of fractional-order complex dynamical networks with delay is realized via adaptive control. In this paper, we mainly use Razumikhin-type stability theory and the matrix inequality technique to realize synchronization.
Remark 4.2
In this paper, we mainly discuss \(0<\alpha<1\); evidently, it is still true for \(\alpha=1\). However, when \(\alpha>1\), it is not suitable for this paper since Lemmas 2.2 and 2.3 are not solved for \(\alpha>1\). This is worth our deep study.
Remark 4.3
The proposed methods in this paper can be used to study the synchronization of chaotic and hyperchaotic systems or multi-synchronization systems with fractional-order derivative.
5 Numerical examples
Three examples are provided to substantiate the theoretical results.
Example 5.1
Consider the following complex dynamical networks:
where \(\alpha=0.98\), \(i=1,2,\ldots,6\), \(f_{j}(\varrho)=\tanh(\varrho)\), \(J=(0,0,0)^{T}\), \(A=\operatorname {diag}(0.2,0.2,0.3)\), \(\Gamma=\operatorname{diag}(0.5,0.6,0.4)\), \(c=2\), \(k_{1}=k_{2}=0.2\), \(k_{3}=k_{4}=k_{5}=k_{6}=0\).
Obviously, \(f_{j}(\cdot)\) (\(j=1,2,3\)) satisfies the Lipschitz condition with \(\Pi_{j}=0.6\).
We select nodes 1 and 2 as pinned nodes. Take \(S(t)=(0,0,0)\in\mathbb{R}^{3}\).
Case 1 By exploiting the MATLAB LMI Toolbox, we can get the matrices \(P_{1}\) and \(P_{2}\) satisfying (7), \(P_{1}=\operatorname{diag}(1.2872, 0.4371, 1.4351)\), \(P_{2}=\operatorname {diag}(1.8363, 1.0765, 0.7430)\).
According to Theorem 3.1, system (32) is synchronized. The simulation results are given in Figures 1 and 2.

The synchronized error \(\pmb{\Vert e_{i}(t) \Vert _{2}}\) , \(\pmb{i=1,2,3,4,5,6}\) , of system ( 32 ).

Case 2 Let \(\beta_{1}=0.05\), we can easily find matrices \(P_{1}\) and \(P_{2}\) satisfying (13), \(P_{1}=\operatorname {diag}(1.3145, 0.9764, 1.1610)\), \(P_{2}=\operatorname{diag}(0.6771,1.0711, 0.5121)\).
According to Theorem 3.2, system (32) under pinning adaptive law (11) is synchronized. The simulation results are given in Figures 3 and 4.


Adaptive coupling strength \(\pmb{c(0)=0.05}\) .
Example 5.2
Consider the following complex dynamical network with time-varying delay:
where \(\alpha=0.98\), \(i=1,2,3,4,5,6\) \(\tau(t)=1\), \(f_{j}(\varrho)=\tanh(\varrho)\), \(J=(0,0,0)^{T}\), \(A=\operatorname {diag}(0.5,0.4,0.4)\), \(\Gamma=\operatorname{diag}(0.5, 0.6, 0.5)\), \(c=0.2\),
Obviously, \(f_{j}(\cdot)\) (\(j=1,2,3\)) satisfies the Lipschitz condition with \(\Pi_{j}=0.6\).
We choose nodes 1, 2 and 3 as pinned nodes. Take \(S(t)=(0,0,0)\in\mathbb{R}^{3}\). \(k_{1}=0.2\), \(k_{2}=0.2\), \(k_{3}=0.2\), \(k_{4}=k_{5}=k_{6}=0\).
Case 1 By exploiting the MATLAB LMI Toolbox, we can get the matrices \(P_{1}\), \(P_{2}\) and K satisfying (21), \(P_{1}=\operatorname{diag}(0.6164, 0.3794, 0.7305)\), \(P_{2}=\operatorname {diag}(0.5164, 0.7861, 0.5532)\), \(K=\operatorname{diag}(0.0567, 0.7613,0.0387)\).
According to Theorem 4.1, system (33) is synchronized. The simulation results are given in Figure 5.

Case 2 Take \(\beta_{2}=0.06\), we can easily get the matrices \(P_{1}\), \(P_{2}\) and \(k^{*}\) satisfying (29), \(P_{1}=\operatorname{diag}(2.6117, 3.5616, 3.5498)\), \(P_{2}=\operatorname {diag}(2.8325, 2.8051, 3.5430)\), \(k^{*}=\operatorname{diag}(0.1671, 0.5675, 0.0653)\).
By Theorem 4.2, it is obvious that system (33) is synchronized by using pinning feedback controllers. The simulation results are given in Figures 6 and 7.


Adaptive feedback gains \(\pmb{k_{1}(0)=0.01}\) , \(\pmb{k_{2}(0)=0.03}\) , \(\pmb{k_{3}(0)=0.04}\) .
Example 5.3
Consider complex networks with 10 nodes, the fractional-order dynamical equation of each node is described by the following fractional-order chaotic Lorenz system:
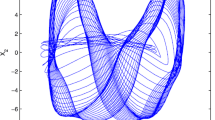
where \(i=1,\ldots,10\). When the parameters are chosen as \(\varrho=1\), \(\omega=2.8\), \(\nu=\frac{8}{3}\) and \(\alpha=0.98\), system (34) displays a chaotic attractor in Figure 8.

Chaotic attractor of a fractional-order chaotic Lorenz system with order \(\pmb{\alpha=0.98}\) .
System (34) can be rewritten as system (5) consisting of ten nodes (\(N=10\)) with the following parameters:
\(f(x_{i})=(0,-x_{i1}x_{i3},x_{i1}x_{i2})^{T}\), \(J=(0,0,0)^{T}\), \(A=\operatorname{diag}(0.5,0.4,0.4)\), \(\Gamma=\operatorname{diag}(0.5, 0.6, 0.5)\), \(c=2\); obviously, \(f_{j}(\cdot)\) (\(j=1,2,3\)) satisfies the Lipschitz condition with \(\Pi_{j}=0.6\). We select nodes 1 and 2 as pinned nodes. Take \(S(t)=(0,0,0)\in\mathbb{R}^{3}\). By exploiting the MATLAB LMI Toolbox, we can get the matrices \(P_{1}\) and \(P_{2}\) satisfying (7), \(P_{1}=\operatorname{diag}(0.2872, 0.4371, 0.4351)\), \(P_{2}=\operatorname{diag}(2.8063, 1.3935, 0.7430)\). According to Theorem 3.1, system (32) is synchronized. The simulation results are given in Figure 9.

6 Conclusions
In this paper, synchronization of fractional-order complex dynamical networks with and without time-varying delay has been studied by applying pinning adaptive control. First, by using the fractional Lyapunov method and generalized Barbalat’s lemma, several sufficient conditions have been derived to realize synchronization of fractional-order complex networks without time-varying delay. Second, by using Razumikhin-type stability theory and fractional integral inequality, some sufficient conditions have been derived to realize synchronization of fractional-order complex networks with time-varying delay. Moreover, several adaptive control strategies to tune the coupling strength and pinning feedback gain have been proposed, and by using the designed adaptive laws, several criteria for synchronization have been established. In the future, it is very interesting to study the multi-synchronization of coupled fractional-order complex dynamical networks with and without time-varying delay.
References
Wu, AL, Zeng, ZG: Boundedness, Mittag-Leffler stability and asymptotical ω-periodicity of fractional-order fuzzy neural networks. Neural Netw. 74, 73-84 (2016)
Wu, AL, Zeng, ZG, Song, XG: Global Mittag-Leffler stability of fractional-order bidirectional associative memory neural networks. Neurocomputing 177, 489-496 (2016)
Liu, WP, Liu, C, Yang, Z, Liu, XY, Zhang, YH, Wei, ZX: Modeling the propagation of mobile malware on complex networks. Commun. Nonlinear Sci. Numer. Simul. 37, 249-264 (2016)
Wang, T, Wang, HJ, Wang, XX: A novel cosine distance for detecting communities in complex networks. Phys. A, Stat. Mech. Appl. 437, 21-35 (2015)
Wei, PC, Wang, JL, Huang, YL: Passivity analysis of impulsive coupled reaction-diffusion neural networks with and without time-varying delay. Neurocomputing 168, 13-22 (2015)
Xu, BB, Wang, JL, Huang, YL, Wei, PC, Ren, SY: Passivity of linearly coupled neural networks with reaction-diffusion terms and switching topology. J. Franklin Inst. 353, 1882-1898 (2016)
Kilbas, A, Srivastava, H, Trujillo, J: Theory and Application of Fractional Equations. Elsevier, New York (2006)
Koeller, R: Applications of fractional calculus to the theory of viscoelasticity. J. Appl. Mech. 51, 299-307 (1984)
Gallegos, JA, Duarte, MA: On the Lyapunov theory for fractional order systems. Appl. Math. Comput. 287-288, 161-170 (2016)
Podlubny, I: Fractional Differential Equations. Academic Press, San Diego (1999)
Li, HL, Jiang, YL, Wang, Z, Zhang, L, Teng, Z: Global Mittag-Leffler stability of coupled system of fractional-order differential equations on network. Appl. Math. Comput. 270, 269-277 (2015)
Lu, JG: Chaotic dynamics and synchronization of fractional-order Arneodo’s systems. Chaos Solitons Fractals 26, 1125-1133 (2005)
Yuan, LG, Yang, QG, Wu, RC, Sun, J, Ma, TD: Parameter identification and synchronization of fractional-order chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 17, 305-316 (2012)
Stamova, I, Stamov, G: Mittag-Leffler synchronization of fractional neural networks with time-varying delays and reaction-diffusion terms using impulsive and linear controllers. Neural Netw. 96, 22-32 (2017)
Yang, LX, Jiang, J: Adaptive synchronization of drive-response fractional-order complex dynamical networks with uncertain parameters. Commun. Nonlinear Sci. Numer. Simul. 19, 1496-1506 (2014)
Chen, JJ, Zeng, ZG, Jiang, P: Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 51, 1-8 (2014)
Yang, Y, Wang, Y, Li, TZ: Out synchronization of fractional-order complex dynamical networks. Optik 127, 7395-7407 (2016)
Wong, WK, Li, HJ, Leung, SYS: Robust synchronization of fractional-order complex dynamical networks with parametric uncertainties. Commun. Nonlinear Sci. Numer. Simul. 17, 4877-4890 (2012)
Ma, TD, Zhang, J: Hybrid synchronization of coupled fractional-order complex networks. Neurocomputing 157, 166-172 (2015)
Yu, WW, Chen, GR, Lu, JH: On pinning synchronization of complex dynamical networks. Automatica 45, 429-435 (2009)
Chen, J, Lu, JA, Wu, XQ, Zheng, WX: Generalized synchronization of complex dynamical networks via impulsive control. Chaos 19, 043119 (2009)
Zhang, QJ, Lu, JA, Lu, JH: Adaptive feedback synchronization of a general complex dynamical network with delayed nodes. IEEE Trans. Circuits Syst. II, Express Briefs 55, 183-187 (2008)
Cai, SM, Hao, JJ, He, QB, Liu, ZR: Exponential synchronization of complex delayed dynamical networks via pinning periodically intermittent control. Phys. Lett. A 375, 1965-1971 (2011)
Jiang, GP, Tang, WKS, Chen, GR: A state-observer-based approach for synchronization in complex dynamical networks. IEEE Trans. Circuits Syst. I, Regul. Pap. 53, 2739-2745 (2006)
Li, HL, Hu, C, Jiang, HJ, Teng, ZD, Jiang, YL: Synchronization of fractional-order complex dynamical networks via periodically intermittent pinning control. Chaos Solitons Fractals 103, 357-363 (2017)
Wang, JW, Ma, QH, Chen, AM, Liang, ZP: Pinning synchronization of fractional-order complex networks with Lipschitz-type nonlinear dynamics. ISA Trans. 57, 111-116 (2015)
Chai, Y, Chen, LP, Wu, RC, Sun, J: Adaptive pinning synchronization in fractional-order complex dynamical networks. Phys. A, Stat. Mech. Appl. 391, 5749-5758 (2012)
Wang, GS, Xiao, JW, Wang, YW, Yi, JW: Adaptive pinning cluster synchronization of fractional-order complex dynamical networks. Appl. Math. Comput. 231, 347-356 (2014)
Xu, M, Wang, JL, Huang, YL, Wei, PC, Wang, SX: Pinning synchronization of complex dynamical networks with and without time-varying delay. Neurocomputing 266, 263-273 (2017)
Liang, S, Wu, RC, Chen, LP: Adaptive pinning synchronization in fractional-order uncertain complex dynamical networks with delay. Phys. A, Stat. Mech. Appl. 444, 49-62 (2016)
Wang, JL, Wu, HN, Huang, TW, Ren, SY, Wu, J: Pinning control for synchronization of coupled reaction-diffusion neural networks with directed topologies. IEEE Trans. Syst. Man Cybern. Syst. 46, 1109-1120 (2016)
Brualdi, RA, Ryser, HJ: Combinatorial Matrix Theory. Cambridge University Press, Cambridge, UK (1991)
Yu, J, Hu, C, Jiang, HJ, Fan, XL: Projective synchronization for fractional neural networks. Neural Netw. 49, 87-95 (2014)
Aguila-Camacho, N, Duarte-Mermoud, MA, Gallegos, JA: Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 19, 2951-2957 (2014)
Pan, LJ, Cao, JD: Stochastic quasi-synchronization for delayed dynamical networks via intermittent control. Commun. Nonlinear Sci. Numer. Simul. 17, 1332-1343 (2012)
Gallegos, JA, Duarte-Mermoud, MA, Aguila-Camacho, N, Gastro-Linares, R: On fractional extensions of Barbalat lemma. Syst. Control Lett. 84, 7-12 (2015)
Li, HL, Hu, CH, Jiang, YL, Wang, ZL, Teng, ZD: Pinning adaptive and impulsive synchronization of fractional-order complex dynamical networks. Chaos Solitons Fractals 92, 142-149 (2016)
Chen, BS, Chen, JJ: Razumikhin-type stability theorems for functional fractional-order differential systems and applications. Appl. Math. Comput. 254, 63-69 (2015)
Acknowledgements
The work is supported by the Natural Science Foundation of China under Grant 61640309.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Li, B., Wang, N., Ruan, X. et al. Pinning and adaptive synchronization of fractional-order complex dynamical networks with and without time-varying delay. Adv Differ Equ 2018, 6 (2018). https://doi.org/10.1186/s13662-017-1454-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1454-1