
Abstract
In this paper, a diffusive Leslie-type predator-prey model is investigated. The existence of a global positive solution, persistence, stability of the equilibria and Hopf bifurcation are studied respectively. By calculating the normal form on the center manifold, the formulas determining the direction and the stability of Hopf bifurcations are explicitly derived. Finally, our theoretical results are illustrated by a model with homogeneous kernels and one-dimensional spatial domain.
Similar content being viewed by others

1 Introduction
Bifurcation phenomena are observed and studied in a variety of fields, such as engineering [1], ecological [2], chemical [3], biological [4–6], control [7, 8] and neural networks [9–13]. A classical predator-prey model is investigated as follows:
The study shows that model (1.1) has complex bifurcation phenomena and dynamic behavior, such as the existence of both Hopf bifurcation and Bogdanov-Takens bifurcation. For more detailed results on model (1.1), one can refer to [14].
As we all know, the spatial heterogeneity of predator and prey distributions is more or less obvious. The predator or prey can flow from higher density regions to lower density ones, which is called normal diffusion. And specifically, to the best of our awareness, few papers which discuss the dynamic behavior of model (1.1) with diffusion have appeared in the literature. This paper attempts to fill this gap in the literature. To achieve this goal, we look at the following model:
where \(u_{i}=u_{i}(x,t),i=1,2, \triangle =\frac{\partial^{2}}{\partial x^{2}}\) denotes the Laplacian operator, \(d_{1}, d_{2}\) are diffusion coefficients of prey and predator, respectively. Ω is a bounded subset with sufficiently smooth boundary ∂Ω in \(R^{n}\), where \(R^{n}\) is an arbitrary positive-integer N-dimensional space. △ is the Laplacian operator in the region Ω. The no-flux boundary condition means that the statical environment Ω is isolated.
In the biological field, the study of the stability and bifurcations of the reaction-diffusion models describing a variety of biological phenomena is one of the fundamental problems, which can be conducive to understand the dynamic behavior. Recently, the stability of the steady state [15, 16] and that of the non-constant steady state solution [17–20] are investigated. The main contributions of this article are as follows: (a) the existence of the global positive solution and the persistence of system (1.2) are discussed in detail; (b) the Hopf bifurcation analysis of system (1.2) is provided; (c) the Lyapunov function is constructed to complete the proof of global stability of the equilibria.
The rest of this article is organized as follows. In Section 2, the existence of a global positive solution of (1.2) as well as the boundedness are considered. In Section 3, the persistence of the system is investigated. In Section 4, the stability of the constant equilibria, the existence of Hopf bifurcations and the stability of a bifurcating periodic solution around the interior constant equilibrium are investigated. In Section 5, the global stability of the constant equilibria is proved by the Lyapunov function method under certain conditions investigated. Finally, simulations are presented to verify our theoretical analysis.
2 Existence of a global positive solution of (1.2)
For convenience, we introduce some notations. For \(x, y \in R\), we denote \(x \wedge y:\min\{x,y\}\), \(x\vee y:=\max\{x,y\}\), \(x_{+}:x\vee 0\), \(x_{-}:(-x)\vee0\) and extend these notations to real-valued functions. If \((\vee,\geq)\) is a partially ordered vector space, we denote its positive cone by \(\vee_{+}:=\{v\in\vee:v\geq0\}\). For \(p\in [1, {+}\infty),p>N/2\), let \(X=\{L^{p}(\Omega)\}^{2}\). Assume \(W=(u,v)\in X\), and its norm is defined as \(\Vert W\Vert =\Vert u\Vert _{p}+\Vert v\Vert _{p}\). Now, model (1.2) can be rewritten as an abstract differential equation
where \(z=(u(x,t), v(x,t))^{T}, z_{0}=(u_{0},v_{0})^{T}\),
with
and
Next, we prove the existence of the local solution for (2.1). First, we give out the following lemma.
Lemma 2.1
For every \(z_{0}\in X _{+}\), the Cauchy problem (2.1) has a unique maximal local solution
which satisfies the following Duhamel formula for \(t\in[ 0,T_{\max})\):
where \(A_{p}\) is an operator and the closure of A in X. Moreover, if \(T_{\max}<\infty\), then \(\lim \sup_{ T^{-}_{\max}} \Vert z(t)\Vert =\infty\).
Proof
Since the operator \(A_{p}\) is the closure of A in X, it generates an analytic, condensed, strong continuous operator semi-group \(e^{tA_{p}}\). Furthermore, for \(t>0\), we have
Moreover, we observe that \(H:D(A)\rightarrow X\) is locally Lipschitz on a bounded set. Via Theorem 7.2.1 in [21], we complete his proof. □
Lemma 2.2
For the initial-boundary problem of model (1.2), the components of its solution u(x,t), v(x,t) are nonnegative.
Proof
To prove \(u(x,t), v(x,t)\geq0\),
with the boundary and initial conditions
After multiplying (2.7) by \(u^{\prime}_{-}\) and \(v^{\prime}_{-}\), respectively, and integrating by parts on the domain Ω, we obtain
Hence, for \(t\in(0,T_{\max})\),
Consequently, \(u^{\prime}(x,t)\geq0, v^{\prime}(x,t)\geq0\).
Now, we know that \(( u^{\prime}(x,t), v^{\prime}(x,t))\) is a solution of (1.2), and according to Lemma 2.1, we finally get that \(u(x,t)\geq0, v(x,t)\geq0, t\in(0,T_{\max})\). Next, we prove the global existence of the positive solution for (1.2). Via Lemmas 2.1 and 2.2, we only need to show that the solution of model (1.2) is uniformly bounded, i.e., dissipation. For this, we first introduce the following lemma. □
Lemma 2.3
([22])
Suppose that \(z(x,t)\) satisfies the following equation:
Then \(\lim_{t\rightarrow\infty}z(x,t)=1\) for any \(x\in\Omega\).
Theorem 2.4
The solution \((u(x,t), v(x,t))\) of (1.2) satisfies the following inequalities:
Proof
By the comparison principle and Lemma 2.3, we obtain easily the first inequality. Therefore, there exist \(T_{1}>0\) and sufficiently small \(0<\epsilon\leq1\) such that \(u(x,t)\leq1+\epsilon\) for any \(x\in\Omega\) and \(t>T_{1}\). For the second equation, we have the following inequality:
By the comparison principle, for the above \(0<\epsilon\leq1\), there exists \(T_{2}(>T_{1})\) such that, for any \(t>T_{2}\),
For the arbitrariness of \(\epsilon>0\), we obtain
As a result, we complete this proof. By Lemmas 2.1, 2.2 and Theorem 2.4, we can get the following theorem. □
Theorem 2.5
System (1.2) has a unique, nonnegative and bounded solution \(Z(x,t)=(u(x,t), v(x,t))\) such that
3 Permanence
In this section, we show that any nonnegative solution \((u(x,t), v(x,t))\) of (1.2) lies in a certain bounded region as \(t\rightarrow \infty\) for all \(x\in\Omega\).
We make the following hypothesis: \((\mathrm{H}_{0})\) \(\frac{\delta}{b\beta}<1\).
Theorem 3.1
If \((\mathrm{H}_{0}) \) holds, the solution (u,v) of (1.2) satisfies the following inequalities:
Proof
From the first equation of (1.2) and Theorem 3.1, we have
By the comparison principle and Lemma 2.3, we obtain easily
From the second equation of (1.2), we have
This implies
From Theorems 2.4 and 3.1, we can easily obtain the following theorem. □
Theorem 3.2
If \((\mathrm{H}_{0}) \) holds, model (1.2) is permanent.
4 The stability of equilibria and the existence of Hopf bifurcations
4.1 The existence of equilibrium of model (1.2)
The system has always constant equilibria \(E_{0}(1,0)\). By the direct calculation, there exists a unique constant positive equilibrium denoted by \(E_{\ast}(u_{0}, v_{0})\) if and only if the following cubic equation
holds in the interval \((0, 1)\). Note that the third-order algebraic equation (4.1) can have one, two, or three positive roots in the interval \((0,1)\) which can be evaluated by using the root formula of the third-order algebraic equation. Correspondingly, system (1.2) can have one, two, or three positive equilibria. Regarding the number of positive equilibria in the interval \((0,1)\) of (1.2), [14] gives the result in detail as follows.
Lemma 4.1
([14])
Let \(\Theta=(\frac{\delta}{\beta }+b-a)^{2}+3a(b-1)\) and \(\Delta=-4\Theta^{3}+(27a^{2}+9a(1-b)(\frac{\delta}{\beta}+b-a)-2(\frac {\delta}{\beta}+b-a)^{3})^{2}\).
-
(H1)
If \(\Delta>0\), then model (1.2) has a unique positive equilibrium \(E_{\ast}\), which is an elementary and anti-saddle equilibrium.
-
(H2)
If \(\Delta=0\) and \(\Theta>0\), then the model has two different positive equilibria: an elementary anti-saddle equilibrium \(E_{\ast}\) and a degenerate equilibrium \(E_{1}\).
-
(H3)
If \(\Delta=0\) and \(\Theta=0\), the model has a unique positive equilibrium \(E_{2}(\frac{3}{1-b}, \frac{3\delta}{\beta(1-b)})\), which is a degenerate equilibrium.
-
(H4)
If \(\Delta<0, \frac{\delta}{\beta}=a-b-\sqrt{3a(1-b)}\) and \(-2\sqrt{a}< b<1\), then model (1.2) has three different positive equilibria \(E^{\ast}_{1}\), \(E^{\ast}_{2}\) and \(E^{\ast}_{3}\), which are all elementary equilibria and \(E^{\ast}_{3}\) is a saddle.
Remark
We further consider the following condition (H1). We suppose (H1) is satisfied throughout the rest of this paper.
4.2 The existence of Hopf bifurcation
In this section we assume that (H1) holds. We first assume that \(E_{*}(u_{0}, v_{0})\) is any point of system (1.2). Now we define the real-valued Sobolev space
and the complexification of X
The linearized system of (1.2) at any point \(E(u_{0},v_{0})\) has the form
with the domain \(D_{L(s)}=X_{C}\), where
Obviously, \(B>0\). From Wu [23], we obtain that the characteristic equation of (4.2) is
It is well known that the eigenvalue problem
has eigenvalues \(\mu_{n}=\frac{n^{2}}{l^{2}}\) (\(n=0,1,2, \ldots\)) with corresponding eigenfunctions
Substituting
into the characteristic Eq. (4.3), we have
Therefore the characteristic Eq. (4.3) is equivalent to
where I is the \(2\times2\) identity matrix and \(M_{n}=\frac{n^{2}}{l^{2}} \operatorname{diag}\{d_{1},d_{2}\}, n=0,1,2, \ldots\) . It follows from (4.4) that the characteristic equations for the equilibrium \((u_{0},v_{0})\) are the following sequence of quadratic transcendental equations:
where
The eigenvalues are given by
We make the following hypothesis with fixing δ:
where \(\rho=\min\{1, \frac{d_{1}}{d_{2}},\frac{B}{\beta}\}\).
Lemma 4.2
-
(i)
Suppose \((\mathrm{H}_{1})\) and \((\mathrm{H}_{5})\) are satisfied. Then all the roots of Eq. (4.5) have a negative real part.
-
(ii)
Suppose \((\mathrm{H}_{1})\) and \((\mathrm{H}_{6})\) hold, then Eq. (4.5) has at least one positive real part.
Proof
-
(i)
Obviously, by \((\mathrm{H}_{5})\) \(T_{n}<0\) for \(n=0,1,2, \ldots\) , we know all the roots of Eq. (4.5) have negative real parts.
-
(ii)
If \((\mathrm{H}_{6})\) holds, we know that \(D_{n}\) is monotone increasing with regard to n, and \(\lim_{n\rightarrow\infty} D_{n} = \infty\) and \(D_{0}<0\). There exists an integer \(n^{\ast}_{0}\geq1\) such that \(D_{n}<0\) when \(n=0,1,2,\ldots, n^{\ast}_{0} \). Hence, there are \(D_{n}<0\), \(T^{2}_{n}-4D_{n}>T^{2}_{n}\), \(\lambda_{1} >0\) and \(\lambda_{2} <0 \) for \(n=0,1,2,\ldots, n^{\ast}_{0}\) and \(D_{n}>0\), \(T^{2}_{n}-4D_{n}< T^{2}_{n}\), \(\lambda_{1} >0\) and \(\lambda_{2} >0\) for \(n \geq n^{\ast}_{0}\). These complete the proof of (i) and (ii).
From the discussion, we have the following theorem. □
Theorem 4.3
-
(i)
Suppose \((\mathrm{H}_{1})\) and \((\mathrm{H}_{5})\) hold, the equilibrium \(E_{*}\) is stable.
-
(ii)
Suppose \((\mathrm{H}_{1})\) and \((\mathrm{H}_{6})\) hold, the equilibrium \(E_{*}\) is unstable.
Next, we consider the occurrence of Hopf bifurcation of \(E_{*}\) by regarding A as a bifurcation parameter with fixing δ. In the light of (4.7), it is known that (4.5) has purely imaginary roots if and only if
and \(D_{n}>0 \) holds. From (4.8) we know that \(A_{n}\) is monotone increasing with regard to n, and
Hence, there is \(A_{n}>0\) for \(n=0,1,2,\ldots\) . Bringing \(A_{n}\) into \(D_{n}\), we get
If \(D_{0}=\delta^{2} (\frac{B}{\beta}- 1) >0\) holds, then there exists an integer \(n^{\ast}_{1}\geq1\) such that \(D_{n}>0\) when \(n=0,1,2,\ldots, n^{\ast}_{1} \) and \(D_{n}\leq0\) when \(n \geq n^{\ast}_{1}\).
Let \(n^{\ast}= [n^{\ast}_{1}]\) and \(\Lambda= \{A_{n^{\ast }-1}>A_{n^{\ast}-2}>A_{n^{\ast}-3}>\cdots>A_{0} \}\).
Lemma 4.4
If \(\frac{B}{\beta}-1>0\) is satisfied, then Eq. (4.5) has purely imaginary roots if and only if \(A \in\Lambda\).
Proof
Let \(\lambda_{n}(A)=\alpha_{n}(A)+i\omega_{n}(A), n=0,1,\ldots,n^{\ast}\) be the roots of Eq. (4.8) satisfying \(\alpha_{n}(A)=0, \omega_{n}(A)=\sqrt{D_{n}(A)}\). If \(\frac{B}{\beta}-1>0\) holds, we know that \(D_{n}\) is monotone decreasing with regard to n, and \(\lim_{n\rightarrow\infty} D_{n}= -\infty\) and \(D_{0}>0\). There exists an integer \(n^{\ast}_{1}\geq1\) such that \(D_{n}>0\) when \(n=0,1,2,\ldots, n^{\ast}\). These complete the proof of Lemma 4.4. From expression (4.7) we have the following conclusion. □
Lemma 4.5
Suppose \(\frac{B}{\beta}-1>0\) is satisfied, then all the roots of Eq. (4.5) with \(A=A_{n}\) (\(n\rightarrow\infty\)) have at least one root with a positive real part except the imaginary roots \(\pm i\sqrt{D_{n}(A_{n})}, n \in(0,1, \ldots, n^{\ast} )\).
Proof
If \(\frac{B}{\beta}-1>0\) holds, we know that \(D_{n}\) is monotone decreasing with regard to n, and \(\lim_{n\rightarrow\infty} D_{n} = -\infty\). Hence, there are \(D_{n}<0\), \(T^{2}_{n}-4D_{n}>T^{2}_{n}\), \(\lambda_{1} >0\) and \(\lambda_{2} <0 \) for \(n>n^{\ast}\). In combination with Lemma 4.4, we complete the proof of Lemma 4.5. □
Based on the above analysis, we have the following theorem.
Theorem 4.6
Suppose \(\frac{B}{\beta}-1>0\) is satisfied. Then model (1.2) undergoes a Hopf bifurcation at the origin when \(A=A_{n}\) for \(0\leq n\leq n^{\ast} \). Moreover:
-
(i)
The bifurcation periodic solution from \(A=A_{0}\) is spatially homogeneous, which coincides with the periodic solution of the corresponding ODE system.
-
(ii)
The bifurcation periodic solution from \(A=A_{n}\) is spatially non-homogeneous for \(0< n\leq n^{\ast}\).
4.3 Direction and stability of Hopf bifurcation
From the previous section, we know that model (1.2) undergoes a Hopf bifurcation at the origin when \(A=A_{n}\), \(n=0,1,\ldots, n^{\ast} \), where \(n^{\ast}\) and \(A_{n}\) are defined as in (4.8).
In this section, we study the direction of Hopf bifurcation and the stability of the bifurcating periodic solution by applying the center manifold theorem and the normal form theorem of partial differential equations. We first transform \(E_{\ast} \) of (1.2) to the origin via the translation: \(\hat{u}=u-u_{0}, \hat{v}-v_{0}\) and drop the hats for simplicity of notation, then (1.2) is transformed into
where
So we have
The straightforward computation yields
Moreover,
So
Then we have
and
which implies \(W_{20}=W_{11}=0\), that is to say,
Therefore
where \(\omega^{\prime}(A_{0})=1>0\), then we have the following theorem.
Theorem 4.7
Suppose \(\frac{B}{\beta}-1>0\) is satisfied.
The Hopf bifurcation at \(A=A_{0}\) is backward (resp. forward);
The bifurcation periodic solution from \(A=A_{0}\) is asymptotically stable (resp. unstable) if \(\operatorname{Re}(c_{1}(A_{0})) <0\) (resp.>0);
The bifurcation periodic solution from \(A=A_{0}\) is increasing (resp. decreasing) if \(T_{2}>0\) (resp.<0).
When \(0< j\leq n^{\ast}\), for \(A_{j}\), we have the following theorem.
Theorem 4.8
Suppose \(\frac{B}{\beta}-1>0\) is satisfied.
The Hopf bifurcation at \(A=A_{j}\) for \(0< j\leq n^{\ast} \) is backward (resp.forward);
The bifurcation periodic solution from \(A=A_{j}\) is asymptotically stable (resp. unstable) if \(\operatorname{Re}(c_{1}(A_{j}))<0\) (resp.>0);
The bifurcation periodic solution from \(A=A_{j}\) is increasing (resp. decreasing) if \(T_{2}>0\) (resp.<0) for \(0< j\leq n^{\ast}\), where \(\operatorname{Re}(c_{1}(A_{j}))\) is defined in Appendix.
5 Global stability of equilibria
In this section, we continue to study the global stability of equilibria.
Theorem 5.1
Suppose that the hypothesis of Lemma 2.3 holds, then the positive constant equilibrium \(E_{\ast}(u_{0},v_{0})\) is globally asymptotically stable if
where \(Q=[a(1-\frac{\delta}{b\beta})^{2}+b(1-\frac{\delta}{b\beta})+1]\).
Proof
Let \((u(x,t), v(x,t))\) be any solution of model (1.2). We introduce the Lyapunov function
Now, we take the derivative of V with regard to t along the trajectory of model (1.2). Then
where
and
Let \(V_{2}=V_{12}+V_{21}\), where
and
where \(p=au^{2}+bu+1\), \(p^{\ast}=au^{2}_{0}+bu_{0}+1\), \(a_{11}= 1-\frac {au_{0}v_{0}u-v_{0}}{pp^{\ast}}\), \(a_{12}=a_{21}=\frac{1}{2} \{ \frac {au^{2}_{0} u+bu_{0}u+u}{pp^{\ast}}-\frac{\delta}{\beta u} \}\), \(a_{22}= \frac{1}{u}\).
Next, we calculate \(V_{2}\) as follows:
It is obvious that \(\frac{dV}{dt}<0\) if and only if the matrix in integrand (5.2) is positive definite, equivalent to \(a_{11}>0 \) and \(\phi(u,v)= a_{11}a_{22}-a_{12}a_{21} >0\), where \(\phi(u,v)= a_{11}a_{22}-a_{12}a_{21}= (1-\frac{au_{0}v_{0}u-v_{0}}{pp^{\ast}}) \frac {1}{u} - \frac{1}{4} \{ (\frac{au^{2}_{0} u+bu_{0}u+u}{pp^{\ast}})^{2}-2 (\frac{au^{2}_{0} u+bu_{0}u+u}{pp^{\ast}})(\frac{\delta}{\beta u})+(\frac {\delta}{\beta u})^{2} \}>0\). By condition (5.1a)-(5.1c), we know \(a_{11}>0\) and \(\phi(u,v)>0\). Consequently, \(E_{\ast}\) is globally asymptotically stable. Thus, we complete this proof. □
Next, we give out the conditions of the global asymptotic stability of the boundary equilibrium \(E_{0}(1,0)\).
Theorem 5.2
The boundary equilibrium \(E_{2}\) of (1.2) is globally asymptotically stable if
holds.
Proof
Define
Taking the derivative of \(V_{0}\) with regard to t along the trajectory of model (1.2), we have
where
Furthermore, we calculate \(V^{2}_{0}\) and reach
According to condition (5.3), \(\frac{dV_{0}}{dt}<0\) except at \(E_{0}\). By LaSalle’s invariance principle, \(E_{0}\) is globally asymptotically stable. □
6 Numerical simulations
In this section, to confirm our analytical results found in the previous section, some examples and numerical simulations are presented. We use Matlab (2012a) to simulate and plot numerical graphs.
Example 1
If we choose \(a=0.5, b=1, \delta=0.5,\beta=20, d_{1}=1, d_{2}=1\), the conditions of Theorem 3.2 are satisfied for system (1.2). We have that the axial equilibrium \(E(1, 0)\) is globally stable (see Figure 1).

Example 2
If we choose \(a=1, b=1, \beta=2, d_{1}=1, d_{2}=10 \), \(\delta=1\), the conditions of Theorem 3.1 are satisfied for system (1.2). The positive equilibrium \(E_{0}(0.8581,0.4290)\) is globally asymptotically stable (see Figure 2).

Example 3
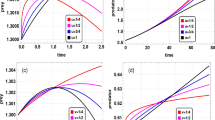
If we choose \(a=10, b=0.1, \delta=0.2,\beta=0.01, d_{1}=0.1, d_{2}=10\), then we know that system (1.2) has a unique positive homogeneous equilibrium \(E(0.2484, 4.9679)\), which is asymptotically stable (see Figure 3). The system undergoes Hopf bifurcation at the equilibrium \(E^{*}\) (see Figure 4). By the formulas derived in the previous section, we get \(c_{1}(A_{0})\approx9.0339e^{+002} +8.0131e^{+002}i\) with the initial value \((0.65, 3.5)\).

Numerical simulations of system ( 1.2 ) for \(\pmb{a=7}\) , \(\pmb{\beta =0.01}\) , \(\pmb{d_{1}=0.1}\) , \(\pmb{d_{2}=10}\) , \(\pmb{b=0.1}\) , \(\pmb{\delta=0.2}\) . The positive equilibrium \(E^{*}\) is locally asymptotically stable with the initial value \((0.65, 3.5)\).

Numerical simulations of system ( 1.2 ) for \(\pmb{a=10}\) , \(\pmb{\beta=0.01}\) , \(\pmb{d_{1}=0.1}\) , \(\pmb{d_{2}=10}\) , \(\pmb{b=0.1}\) , \(\pmb{\delta=0.2}\) . The positive equilibrium \(E^{*}\) of (1.3) becomes unstable and there exist spatially homogeneous periodic solutions with the initial value \((0.65, 3.5)\).
7 Conclusions
Based on model (1.1), we propose a diffusive prey-predator model with Leslie-type sigmoidal functional response and subject to the Neumann boundary conditions which is in the form of model (1.2). The dynamic behavior of the model is investigated. Some important qualitative properties, such as the existence of a global positive solution, persistence, the local stability and global stability of the equilibria, are obtained. Hopf bifurcations are explored by analyzing the characteristic equations. Moreover, the formulas determining the direction and stability of the bifurcating periodic solutions are derived by using the center manifold and the normal form theory of partial functional differential equations. Some numerical simulations are carried out to support our theoretical analysis. In the future, some challengeable attempts to study the Hopf bifurcation, steady state solution and Turing-Hopf bifurcation of fractional diffusive in a predator-prey system with or without time delay will be proceeded.
References
Kalmár-Nagy, T, Stépán, G, Moon, FC: Subcritical Hopf bifurcation in the delay equation model for machine tool vibrations. Nonlinear Dyn. 26(2), 121-142 (2001)
Rietkerk, M, Dekker, SC, de Ruiter, PC, van de Koppel, J: Self-organized patchiness and catastrophic shifts in ecosystems. Science 305(5692), 1926-1929 (2004)
Field, RJ, Noyes, RM: Oscillations in chemical systems. IV. Limit cycle behavior in a model of a real chemical reaction. J. Chem. Phys. 60(5), 1877-1884 (1974)
Angeli, D, Ferrell, JE, Sontag, ED: Detection of multistability, bifurcations, and hysteresis in a large class of biological positive-feedback systems. Proc. Natl. Acad. Sci. USA 101(7), 1822-1827 (2004)
Xiao, M, Cao, J: Hopf bifurcation and non-hyperbolic equilibrium in a ratio-dependent predator-prey model with linear harvesting rate. Math. Comput. Model. 50(3), 360-379 (2009)
Huang, C, Cao, J, Xiao, M, Alsaedi, A, Alsaadi, FE: Controlling bifurcation in a delayed fractional predator-prey system with incommensurate orders. Appl. Math. Comput. 293, 293-310 (2017)
Xu, W, Hayat, T, Cao, J, Xiao, M: Hopf bifurcation control for a fluid flow model of Internet congestion control systems via state feedback. IMA J. Math. Control Inf. 33(1), 69-93 (2016)
Xu, W, Cao, J, Xiao, M: Bifurcation analysis of a class of \((n+1)\)-dimension Internet congestion control systems. Int. J. Bifurc. Chaos Appl. Sci. Eng. 25(2), 1550019 (2015)
Cheng, Z, Wang, Y, Cao, J: Stability and Hopf bifurcation of a neural network model with distributed delays and strong kernel. Nonlinear Dyn. 86(1), 323-335 (2016)
Xu, W, Cao, J, Xiao, M, Ho, DWC, Wen, G: A new framework for analysis on stability and bifurcation in a class of neural networks with discrete and distributed delays. IEEE Trans. Cybern. 45(10), 2224-2236 (2015)
Huang, C, Meng, Y, Cao, J, Alsaedi, A, Alsaadi, FE: New bifurcation results for fractional BAM neural network with leakage delay. Chaos Solitons Fractals 100, 31-44 (2017)
Huang, C, Cao, J, Xiao, M: Hybrid control on bifurcation for a delayed fractional gene regulatory network. Chaos Solitons Fractals 87, 19-29 (2016)
Huang, C, Cao, J, Xiao, M, Alsaedi, A, Hayat, T: Bifurcations in a delayed fractional complex-valued neural network. Appl. Comput. Math. 292, 210-227 (2017)
Huang, J, Ruan, S, Song, J: Bifurcations in a predator-prey system of Leslie type with generalized Holling type III functional response. J. Differ. Equ. 257(6), 1721-1752 (2014)
Yang, Y, Xu, Y: Global stability of a diffusive and delayed virus dynamics model with Beddington-DeAngelis incidence function and CTL immune response. Comput. Math. Appl. 71(4), 922-930 (2016)
Yi, F, Wei, J, Shi, J: Global asymptotical behavior of the Lengyel-Epstein reaction-diffusion system. Appl. Math. Lett. 22(1), 52-55 (2009)
Peng, R, Shi, J: Non-existence of non-constant positive steady states of two Holling type-II predator-prey systems: strong interaction case. J. Differ. Equ. 247(3), 866-886 (2009)
Ko, W, Ryu, K: Non-constant positive steady-states of a diffusive predator-prey system in homogeneous environment. Aust. J. Math. Anal. Appl. 327(1), 539-549 (2007)
Zeng, X, Liu, Z: Nonconstant positive steady states for a ratio-dependent predator-prey system with cross-diffusion. Nonlinear Anal., Real World Appl. 11(1), 372-390 (2010)
Li, S, Wu, J, Nie, H: Steady-state bifurcation and Hopf bifurcation for a diffusive Leslie-Gower predator-prey model. Comput. Math. Appl. 70(12), 3043-3056 (2015)
Cholewa, JW, Dlotko, T: Global Attractors in Abstract Parabolic Problems. Cambridge University Press, Cambridge (2000)
Ye, Q, Li, Z, Wang, M, Wu, Y: Introduction to Reaction-Diffusion Equations. Chinese Science Press, Beijing (1990)
Wu, J: Theory and Applications of Partial Functional Differential Equations. Springer, New York (2012)
Hassard, BD, Kazarinoff, ND, Wan, YH: Theory and Applications of Hopf Bifurcation. Cambridge University Press, Cambridge (1981)
Yi, F, Wei, J, Shi, J: Bifurcation and spatiotemporal patterns in a homogeneous diffusive predator-prey system. J. Differ. Equ. 246(5), 1944-1977 (2009)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (No. 11601543), the Natural Science and Technology Foundation of Henan Province (No.15A110046), the Education Department Foundation of Henan Province (No. 15A110046 and 13A110101) and the Research Innovation Project of ZhouKou Normal University (no. ZKNUA201303).
Author information
Authors and Affiliations
Corresponding author
Additional information
Declarations
The author declares that there is no conflict of interests regarding the publication of this paper.
Competing interests
The author declares that she has no competing interests.
Authors’ contributions
The author contributed equally to the writing of this paper. The author read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
In this section, we follow the bifurcation formula [24] to determine the bifurcation direction of the spatially non-homogeneous periodic solutions found in Theorem 4.8. When \(A=A^{H}_{j,\pm}\) (\(j\in N\)), we calculate \(\operatorname{Re}(C_{1}(A_{j}))\). We set
From [25], we know \(\langle q^{\ast},Q_{qq} \rangle =\langle q^{\ast},Q_{q\bar {q}}\rangle= \langle \bar{q^{\ast}},Q_{\bar{qq}} \rangle =0\), when \(j\in N\), it follows that we calculate \(\langle q^{\ast}, Q_{w_{20\bar{q}}} \rangle \), \(\langle q^{\ast}, Q_{w_{11q}}\rangle\) and \(\langle q^{\ast}, C_{qq\bar{q}} \rangle\). It is straightforward to compute that
where
Then we get
where \(\alpha_{5}=(\delta+\frac{4d_{2} j^{2}}{l^{2} })(A_{j}-\frac{4d_{1} j^{2}}{l^{2}}) +B\delta^{2}/\beta \), \(\alpha_{6}= \delta A_{j} +B\delta^{2}/\beta\).
and \(f_{u}u\), \(f_{u}v\), \(g_{u}u\), \(g_{u}v\), \(g_{v}v\), \(f_{u}uu\), \(f_{u}uv\), \(g_{u}uu\), \(g_{u}uv\), \(g_{u}vv\) are given in (4.6). Then we have
and
with
Notice that, for any \(j\in N\), \(\int^{l\pi}_{0}\cos^{2}\frac{jx}{l}=\frac{l\pi}{2}\), \(\int^{l\pi }_{0}\cos\frac{1nx}{l}\cos^{2}\frac{jx}{l}=\frac{l\pi}{4}\), \(\int^{l\pi }_{0}\cos^{3}\frac{jx}{l}=\frac{3\pi}{8}\), so we have
Since \(l\pi\bar{a^{\ast}_{j}}=\frac{i\omega+\delta}{2 \delta}\), \(l\pi \bar{b^{\ast}_{j}}= \frac{\beta(-i\omega+\delta)(i\omega+\delta+\frac{d_{2} j^{2}}{l^{2}})}{2 \delta^{3}}\), it follows that
and
where we denote \(\mu=\delta+\frac{d_{2} j^{2}}{l^{2}}\) and define \(\Gamma_{R}:=\operatorname{Re}\Gamma\), \(\Gamma_{I}:=\operatorname{Im}\Gamma\) for \(\Gamma=\xi, \eta,\tau, \chi\). More precisely,
So far, we have
Thus the bifurcating periodic solution is supercritical (resp. subcritical) if \(\frac{1}{\alpha^{\prime}(A^{H}_{j})}\operatorname{Re}(C_{1}(A^{H}_{j})) <0\) (resp.>0).
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Li, N.N. Diffusive induced global dynamics and bifurcation in a predator-prey system. Adv Differ Equ 2017, 323 (2017). https://doi.org/10.1186/s13662-017-1318-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1318-8