
Abstract
In this paper, we develop and analyze a discontinuous Galerkin (DG) method for the two-dimensional nonlinear Zakharov-Kuznetsov (ZK) equation. The DG method could be applied without introducing any auxiliary variables or rewriting the original equation into a larger system. Stability and an error estimate are discussed carefully. Finally, a numerical example for the nonlinear problem is given to show that the scheme attains the optimal \((k+1)\)th order of accuracy for piecewise \(Q^{k}\) polynomials of degree k when \(k\geq2\).
Similar content being viewed by others

1 Introduction
The Zakharov-Kuznetsov (ZK) equation is a generalization of the Korteweg-de Vries (KdV) equation. It was obtained by Zakharov and Kuznetsov [1] to describe the behavior of weakly nonlinear ion-acoustic waves in a plasma comprising cold ions and hot isothermal electrons in the presence of a uniform magnetic field. If a magnetic field is directed along the x-axis, the ZK equation in renormalized variables [2] takes the form
where \(\nabla^{2}=\partial^{2}_{x}+\partial^{2}_{y}+\partial^{2}_{z}\) is the isotropic Laplacian. The ZK equation is given by
and
in two- and three-dimensional spaces, respectively. Several properties of this equation, including the existence and stability of solitary wave solutions, have been extensively studied in the literature (see [3, 4] and references therein).
Many numerical schemes have been proposed for some well-known one-dimensional equations, however, little numerical analysis has been published for the multi-dimensional cases. Few numerical methods have been proposed for solving the ZK equation. Xu and Shu [5] discussed a local discontinuous Galerkin (LDG) method for the ZK equation, which is different from the DG method in our paper. Ren et al. [6] proposed an implicit fully discrete LDG method for the fractional Zakharov-Kuznetsov equation and proved the stability and convergence. In [7], Cheng and Shu presented a new DG method for solving some kinds of time dependent partial differential equations in one dimension. The method could be used to solve the problems without introducing any auxiliary variables or rewriting the original equation into a larger system.
For the sake of simplicity, we will only consider the problem in two dimension on a rectangular domain, \(\Omega=[a,b]\times[c,d]\). However, the method in our paper could easily be generalized to higher dimensions.
In this paper, we will present and analyze a DG method for the ZK equation:
with an initial condition
and periodic boundary conditions. Here \(f(u)\) is a nonlinear function.
The rest of this paper is as follows. In Section 2, some notations and auxiliary results are introduced, which will be used later in this paper. In Section 3, the DG method for ZK equation is presented, and a stability error estimate is discussed in Section 4. Some numerical experiments are given to illustrate the accuracy and capability of the method in Section 5. Finally some concluding remarks and comments for future work are given in Section 6.
2 Notations
2.1 Basic notations
For the sake of simplicity, a rectangular mesh is assumed to cover the computational domain \([a,b]\times[c,d]\),
for \(i=1,\ldots, N_{x}\), \(j=1,\ldots, N_{y}\), where
and
are discretizations in x over \([a,b]\) and y over \([c,d]\), respectively. The center of the element in the x-direction is \(x_{i} =(x_{i-1/2}+x_{i+1/2})/2\); the center of the element in the y-direction is \(y_{j} =(y_{j-1/2}+y_{j+1/2})/2\). We define \(I_{i}\) and \(J_{j}\) by \(I_{i}=[x_{i-\frac{1}{2}},x_{i+\frac{1}{2}}] \), \(J_{j}=[y_{j-\frac{1}{2}}, y_{j+\frac{1}{2}}] \) for \(i=1,\ldots, N_{x}\), \(j=1,\ldots, N_{y}\). We have \(I_{i,j}=I_{i}\times J_{j}\).
We denote by \(u_{i+\frac{1}{2},y}^{+}\) and \(u_{i+\frac{1}{2},y}^{-}\) the values of u at \(x_{i+1/2}\), and by \(u_{x,j+1/2}^{+}\) and \(u_{x,j+1/2}^{-}\) the values of u at \(y_{j+1/2}\), from the top cell \(I_{i}\times J_{j+1}\) and from the bottom cell \(I_{i}\times J_{j}\), respectively.
Denote the cell lengths
and \(h=\max(\max_{1\leq i\leq N_{x}}\Delta x_{i},\max_{1\leq j\leq N_{y}}\Delta y_{j})\).
Assume the mesh is regular, namely there is a constant \(c>0\) independent of h such that
Define the space \(V_{h}^{k}\) as the space of tensor product piecewise polynomials of degree at most k in each variable on every element
In this paper we use C to denote a positive constant, which may have a different value in a different occurrence. For any integer \(s\geq0\), let \(H^{s}(\Omega)\) represent the well-known Sobolev space equipped with the norm \(\|\cdot\|_{s}\). Let the scalar inner product on \(L^{2}\) be denoted by \((\cdot,\cdot)\), and the associated norm by \(\|\cdot\|\). Furthermore, let \(\|\cdot\|_{\infty}\) represent the norm on \(L^{\infty}\) [8].
2.2 Projection
In order to give an error estimates for two-dimensional problems in Cartesian meshes, we will give the projection in one dimension, which has been used in [7, 9, 10]. When \(k\geq3\), we could choose a projection \(\mathcal{P}\) such that, for any u, \(\mathcal{P}u\) satisfies
for any \(v\in V_{h}^{k-3}\) and
at all \(x_{i+\frac{1}{2}}\).
Denote by \(\eta=u-\mathcal{P}u\) the projection error. It is easy to show [11]
where C is a positive constant that depends on k and \(\|u\|_{k+1}\) of the function u, \(\tau_{h}\) denotes the set of boundary points of all elements \(I_{i}\).
Next we give the projection in two dimensions. On a rectangle \([a,b]\times[c,d]\), define
where the subscripts indicate the application of the one dimensional operators \(\mathcal{P}\). Some properties for the projection \(\mathbb {P}\) are listed thus:
for any \(v(x,y)\in(P^{k-3}(I_{i})\otimes P^{k}(J_{j}))\cup (P^{k}(I_{i})\otimes P^{k-3}(J_{j}))\). Also
and
Similar to the one-dimensional case, there are some important approximation results for the projection (2.2),
where \(\eta=\mathbb{P}\omega-\omega\). \(\tau_{h}\) denotes the set of boundary points of all elements \(I_{i}\times J_{j}\), and we define
3 DG scheme
In this section we define the discontinuous Galerkin method for equation (1.4): find \(u_{h}\in V_{h}^{k}\), such that for all test functions \(v_{h}\in V_{h}^{k}\),
The flux \(\hat{f}(w^{-},w^{+})\) is a monotone flux. Some examples of monotone fluxes can be found in [12]. In this paper we could use the Lax-Friedriches flux,
The other ‘hat’ terms in (3.1) are the boundary terms that emerge from integration by parts. In order to ensure the stability, we could take the simple choices such that
or
It is crucial that we take \((\hat{u}_{h})_{x}=(u_{h})_{x}^{+}\), \((\overline{u}_{h})_{y}=(u_{h})_{y}^{+}\) and the pair of fluxes \(\hat{u}_{h}\), \((\hat{u}_{h})_{xx}\) from the opposite directions; likewise for the pair \(\overline{u}_{h}\) and \((\overline{u}_{h})_{xy}\).
Equation (3.1) defines the DG method in integral form. To describe the algebraic problem to which the equation leads, let \(\{\varphi^{s}_{i}\theta^{m}_{j}\}\) be a tensor product local basis function system for \(Q^{k}(I_{i}\times J_{j})\), where \(\{\varphi^{s}_{i}\}_{s=1}^{k}\) and \(\{\theta^{m}_{j}\}_{m=1}^{k}\) are bases for the subspaces \(P^{k}(I_{i})\) and \(P^{k}(J_{j})\), respectively. Let
If in (3.1) we choose \(v_{h}=\varphi^{q}_{i}\theta^{r}_{j}\), \(1\leq q\leq k\), \(1\leq r\leq k\), then we can obtain
where \(F^{qr}_{ij}(v_{h})\) consists of terms from the left hand side of equation (3.1) except the first term.
We use the third order explicit TVD Runge-Kutta method in time direction [13]. The definition of the algorithm is now complete.
4 Stability analysis
Theorem 4.1
The solution \(u_{h}\) of the DG scheme (3.1) satisfies the following stability result:
Proof
We introduce a short-hand notation:
where
We will prove Theorem 4.1 by analyzing the above three terms \(E^{1}_{ij}\), \(E^{2}_{ij}\), \(E^{3}_{ij}\). Take \(v_{h}=u_{h}\) in the scheme (3.1), and denote \(F(u)=\int f(u)\, du\), then we have
where
It is easy to obtain
here we drop the subscript \(i-\frac{1}{2}\), y for simplicity because all quantities are evaluated in \(\Theta_{i-\frac{1}{2},y}\). The mean value theorem is applied and ξ is a value between \(u^{-}\) and \(u^{+}\), and we have used the fact \(F^{\prime}(\xi)= f(\xi)\) and the monotonicity of the flux function f̂ to obtain inequality (4.8).
For the term \(E^{2}_{ij}\), we obtain
where
Summing over i, j in (4.9), we have
Now we consider the term \(E^{3}_{ij}\). By a similar argument to that used for \(E^{2}_{ij}\), we can obtain
Summing over i, j in (4.2), we have
there is no boundary term left because of the periodic boundary condition. Now, combining (4.8), (4.11), and (4.12), we complete the proof. □
Next we state an error estimate for our scheme (3.1) for the linear case \(f(u)=u\). We obtain the following theorem.
Theorem 4.2
Let u be the exact solution of the problem (1.4), and \(u_{h}\) be the numerical solution of scheme (3.1). If we use \(V_{h}^{k}\) space with \(k\geq3\), then we have the error estimate
where the constant C depends on k, t, \(\|u\|\).
Proof
Using the notation in (4.2), the DG scheme (3.1) could be written as
for all \(v_{h}\in V_{h}^{k}\). Note that the scheme (3.1) is satisfied when the numerical solutions \(u_{h}\) are replaced by the exact solutions u; we have
for all \(v_{h}\in V_{h}^{k}\). Then the error equation is obtained,
for all \(v_{h}\in V_{h}^{k}\). We denote
and we take the test function \(v_{h}=e_{h}\), then
For the left side of (4.18), from the stability result (4.13) we have
To the right side of (4.18), we write out all the terms
Note that by the properties of the projection \(\mathbb{P}^{-}\), we know that the right terms except the first one in (4.20) are zeros, so (4.20) becomes
Now we plug (4.19) and (4.21) into the equality (4.18), sum over i, j, and use the approximate result (2.6), and we have
From Gronwall’s inequality and the fact that the initial error is
the approximate result (2.6) finally gives the error estimate.
Then Theorem 4.2 follows for \(k\geq3\). □
5 Numerical results
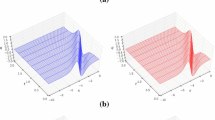
In this example we show the numerical results for the equation
the steady progressive wave solution is of the form
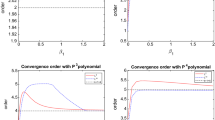
where θ is an inclined angle with respect to the x-axis. We choose the constants \(c=0.01\), \(\varepsilon=0.01\). We use the third order Runge-Kutta method [13] and the time-space restriction is taken as \(\Delta t= \mathrm{CFL}\, h^{3}\). The optimal CFL number can be obtained by a standard von Neumann analysis. Here we simply choose a CFL number by numerical experiments to make the scheme stable. All the computations were performed in double precision. We can see in Tables 1 and 2 that the method with \(Q^{k}\) elements gives a \((k+1)\)th order of accuracy for the uniform meshes when \(k\geq2\), for \(Q^{0}\) and \(Q^{1}\), the scheme is not consistent.
6 Concluding remarks
In the paper a discontinuous Galerkin (DG) method for the two-dimensional nonlinear Zakharov-Kuznetsov (ZK) equation is presented and analyzed. Compared to the LDG method, stability and an error estimate is proved. Numerical examples are given to illustrate the accuracy and capability of the methods. In the future, we will develop this class of DG method for more general PDEs in multi-dimensions, and on nonrectangular regions.
References
Zakharov, VE, Kuznetsov, EA: On three-dimensional solitons. Sov. Phys. JETP 39, 285-286 (1974)
Kivshar, YS, Pelinovsky, DE: Self-focusing and transverse instabilities of solitary waves. Phys. Rep. 331, 117-195 (2000)
Biagioni, HA, Linares, F: Well-posedness results for the modified Zakharov-Kuznetsov equation. Prog. Nonlinear Differ. Equ. Appl. 54, 181-189 (2003)
Faminskii, AV: The Cauchy problem for the Zakharov-Kuznetsov equation. Differ. Equ. 31, 1002-1012 (1995)
Xu, Y, Shu, C-W: Local discontinuous Galerkin methods for two classes of two-dimensional nonlinear wave equations. Physica D 208, 21-58 (2005)
Ren, Z, Wei, L, He, Y, Wang, S: Numerical analysis of an implicit fully discrete local discontinuous Galerkin method for the fractional Zakharov-Kuznetsov equation. Math. Model. Anal. 17, 558-570 (2012)
Cheng, Y, Shu, C-W: A discontinuous Galerkin finite element method for time dependent partial differential equations with higher order derivatives. Math. Comput. 77, 699-730 (2008)
Kumar, S: A new analytical modelling for telegraph equation via Laplace transform. Appl. Math. Model. 38, 3154-3163 (2014)
Xu, Y, Shu, C-W: Error estimates of the semi-discrete local discontinuous Galerkin method for nonlinear convection-diffusion and KdV equations. Comput. Methods Appl. Mech. Eng. 196, 3805-3822 (2007)
Xu, Y, Shu, C-W: Local discontinuous Galerkin methods for three classes of nonlinear wave equations. J. Comput. Math. 22, 250-274 (2004)
Ciarlet, P: The Finite Element Method for Elliptic Problems. North-Holland, Amsterdam (1978)
Cockburn, B, Shu, C-W: TVB Runge-Kutta local projection discontinuous Galerkin finite element method for conservation laws II: general framework. Math. Comput. 52, 411-435 (1989)
Shu, C-W, Osher, S: Efficient implementation of essentially non-oscillatory shock-capturing schemes. J. Comput. Phys. 77, 439-471 (1988)
Acknowledgements
This work is supported by the High-Level Personal Foundation of Henan University of Technology (2013BS041), the Plan For Scientific Innovation Talent of Henan University of Technology (2013CXRC12), and the National Natural Science Foundation of China, Tian Yuan Special Foundation (11426090, 11526078), and the China Postdoctoral Science Foundation funded project (2015M572115).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Sun, H., Liu, L. & Wei, L. A discontinuous Galerkin finite element method for the Zakharov-Kuznetsov equation. Adv Differ Equ 2016, 158 (2016). https://doi.org/10.1186/s13662-016-0890-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-016-0890-7