
Abstract
In this paper, a nonclassical sinc collocation method is constructed for the numerical solution of systems of second-order integro-differential equations of the Volterra and Fredholm types. The novelty of the approach is based on using the new nonclassical weight function for sinc method instead of the classic ones. The sinc collocation method based on nonclassical weight functions is used to reduce the system of integro-differential equations to a system of algebraic equations. Furthermore, the convergence of the method is proposed theoretically, showing that the method converges exponentially. By solving some examples, including problems with a non-smooth solution, the results are compared with other existing results to demonstrate the efficiency of the new method.
Similar content being viewed by others

1 Introduction
In the definition of integro-differential equations, the unknown function is under the sign of integration, and its derivatives also appear in the equation. Such a problem can be classified into the Fredholm and Volterra types. The upper bound of an integral part in the Volterra type is variable while it is a constant for the Fredholm type [1, 2].
Many important problems can be modeled by a system of integral or integro-differential equations. So, solving the integro-differential equations has attracted much attention from applied mathematics researchers [3].
Finding the exact solution of the integro-differential systems is quite challenging, so it is often necessary to propose efficient numerical techniques.
Recently, several numerical methods, such as single term walsh series [1], Legendre wavelets operational method [4], Bernstein operation matrix method [5], Chebyshev collocation method [6], Fibonacci polynomials method [7], spectral Legendre-Chebyshev [8], spectral method based on orthogonal polynomials [9], differential transform [10] and Chebyshev quadrature collocation method [11] have been used to approximate the solution of integro-differential equations. In [12–15], the stochastic integro-differential equations have been solved using moving least squares, cubic B-spline, meshless discrete collocation, and orthonormal Bernstein polynomials method. In addition, some good attempts have been made to approximate the solution of integro-differential equations based on hybrid parabolic and block-pulse functions, the truncated Fibonacci series, Bernoulli polynomials, and rationalized Haar functions [14, 16–21].
In this paper, we considered the general form of he second-order linear Fredholm integro-differential system
and the second-order Volterra integro-differential system
subjected to the initial conditions
where
and \(\mathbf{Y}(x)=[y_{1}(x),\ldots ,y_{m}(x)]^{T}\) are unknown functions to be determined. The functions \(f_{i}(x)\) and the coefficients \(p^{(\gamma )}_{i,j}(x)\) and \(q^{(\gamma )}_{i,j}(x)\) should be continues on \([0,1]\) but do not need to be differentiable on \([0,1]\). It is known that such a model problem can be used to simulate the wind ripple in the desert [22], the fractal model of dropwise condensation [23], the glass-forming composition for bulk metallic glasses [24], and many other phenomena. So, constructing the reliable algorithms for solving the problem is of high importance.
Frank Stenger introduced numerical approximations based on sinc function [25, 26], and then they were expanded for many applications in numerical analysis [27]. The classical sinc basis functions have been widely used to solve the linear Fredholm integro-differential equations [28], the Volterra integral and integro-differential equations [29], and the nonlinear second-order integro-differential equations system with Dirichlet conditions [30].
For the first time, Shizgal extended the nonclassical weight functions to approximate the solution of the Boltzmann equation [31]. Then the method has been used to approximate the eigenvalues and eigenfunction of the Schrödinger equation [32]. Our method consists of reducing the solution of the problems (1.1) or (1.2) with initial conditions (1.3) to a system of algebraic equations. To do this, we will use the nonclassical sinc collocation method. It is known that the classical translated sinc basis functions are not differentiable at zero, so we will try to construct the nonclassical sinc basis functions such that they are differentiable at zero. Also, we will use some proper weight functions that produce more accurate results compared to the classical basis functions to solve the problem above. It will be proved that the nonclassical sinc method converges to the exact solution with exponential rates of convergence. Since the method does not need differentiability of the solution on the boundary, the method is also applicable for problems with the non-smooth solution.
The paper is organized as follows: In Sect. 2, the sinc basis functions are introduced to be used in the subsequent sections. In Sect. 3, the nonclassical sinc collocation method is used to approximate the solution of systems (1.1) and (1.2) along with the initial conditions (1.3). In Sect. 4, we discussed the convergence and error analysis of the proposed method. In Sect. 5, the methods have been used to solve some problems to demonstrate the applicability and accuracy of the methods computationally. Finally, Sect. 6 is devoted to the conclusion of the paper.
2 Sinc function preliminaries
To be used in the next section, we will recall the following results taken from [27, 29, 33–38].
One can define the sinc function for the whole real numbers as follows
Also, the translated sinc functions for \(h>0\) can be defined as
The cardinality of the translated sinc basis functions at the interpolating points \(x_{k}=kh\) is obvious, i.e.,
For the function f defined on real line with \(h>0\), the following series
is called the Whittaker cardinal expansion of f if this series converges. It is clear that the cardinal function is an interpolant for f at the points \(\{jh\}_{j=-\infty}^{\infty}\) in the infinite strip
which is a subset of the complex plane. To use the sinc basis functions on the finite interval \((0,1)\), we can apply the conformal map
with the eye-shaped domain
and the range \(D_{s}\).
We will combine the translated sinc functions with the conformal mapping ϕ to obtain the basis functions
The inverse mapping of \(w=\phi (z)\) is as follows
For the evenly spaced knots \(\{kh\}_{k=-\infty}^{\infty}\) on the real line, their corresponding images \(x_{k}\in (0,1)\), which are real in \(D_{E}\), are
Let \(D_{E}\) be a simply connected domain in the complex plane with boundary points \(a\neq b\) and ϕ be a conformal map from \(D_{E}\) onto \(D_{s}\) with \(\phi (a)=-\infty \) and \(\phi (b)=\infty \). Also, let us denote by ψ the inverse map of ϕ and define
and
Definition 1
Let \(B(D_{E})\) be the class of functions f, which are analytic in \(D_{E}\), and
where \(L=\{iv:|v|< d\}\) and on the boundary of \(D_{E}\) (denoted by \(\partial D_{E}\))
Theorem 2
Let \(f\in B(D_{E})\), and let n be a positive integer then
for some constant \(c>0\) in which the mesh-size h is chosen as:
Proof
See [33]. □
Theorem 3
Let for \(f\in B(D_{E})\) and some positive constants α, β, and C we have
with
and
If h is selected as (2.3), then for all \(x\in \Gamma \),
Proof
See [34]. □
If we suppose that \(\frac{q^{(0)}_{i,j}(x,.)}{\phi '}\), \(\frac{q^{(1)}_{i,j}(x,.)}{\phi '}\), \(\frac{q^{(2)}_{i,j}(x,.)}{\phi '}\in B(D_{E})\), then using (2.6) on the right-hand side of (1.1), we have
Theorem 4
Let for \(f\in B(D_{E})\) and the positive constants α, β, and C we have
where \(\Gamma _{a}\) and \(\Gamma _{b}\) are defined in (2.4) and (2.5). If h is selected as (2.3), then for all \(x\in \Gamma \), we have
where
Proof
Also, if we suppose that \(\frac{q^{(0)}_{i,j}(x,.)}{\phi ^{\prime}}\), \(\frac{q^{(1)}_{i,j}(x,.)}{\phi ^{\prime}}\), \(\frac{q^{(2)}_{i,j}(x,.)}{\phi ^{\prime}}\in B(D_{E})\), then using (2.8) on the right-hand side of (1.2), we obtain
Lemma 5
For the simply connected domains \(D_{E}\) and \(D_{s}\) and the one-to-one conformal mapping \(\phi :D_{E}\rightarrow D_{s}\), we have
Proof
See [36]. □
Using the nonclassical sinc basis functions, \(f(x)\) can be approximated on the whole real line as follows [37]
where \(W(x)\) is a positive weight function. Obviously, for the points \(x_{k}=kh\), the interpolation conditions
hold.
Theorem 6
Let \({\phi ^{\prime}}^{2}f\in B(D_{E})\), and for some constant \(c_{1}\), the weight function W satisfies \(\frac{W(x)}{W(x_{j})}< c_{1}\). Also, let for some positive constants α, β, and c we have
where \(\Gamma _{a}\) and \(\Gamma _{b}\) are defined in (2.4) and (2.5). If h is satisfied in (2.3), then for all \(x\in \Gamma \), we have, [37]
Proof
See [37]. □
3 The nonclassical sinc collocation method
Consider the Fredholm integro-differential system (1.1) as well as the Volterra integro-differential system (1.2) connected with initial conditions (1.3). Let \(\mathbf{Y}= [y_{1}(x),\cdot ,y_{j}(x),\ldots , y_{m}(x) ]^{T} \in B(D_{E})\) be the exact solution of (1.1)-(1.3) or (1.2)-(1.3). The translated sinc functions \(S_{k}(x)\) are not differentiable at zero, so we define the new functions
and call them the modified sinc basis functions. The new basis functions are satisfied in the relations
so they are well defined and differentiable at zero now. Using the new basis (3.1), we define \(u_{j,n}(x)\) as
to approximate the exact solution \(y_{j}(x)\), where \(c_{j,k}\) are unknown constants to be determined. Since the basis functions are zero at the initial point, and the initial conditions of the problem are not homogenous, we need to add the polynomials
to the approximate solution (3.2), to be satisfied in the initial conditions (1.3). So, the new approximate solution can be defined as
where
It should be noted that the approximate solution \(\mathbf{Y}_{n}(x)\) now satisfies the initial conditions (1.3), i.e.,
3.1 Fredholm integro-differential system
Substituting \(\mathbf{Y}_{n}(x)\) into (1.1) and multiplying both sides by \(\frac{h^{2}}{\phi ^{\prime}}\), we have a relation that can be discretized at the sinc grid points \(x_{l}\), \(l=-n,\ldots ,n\), to obtain
where
with
Simplifying (3.6), we obtain the following system of linear equations
where we used \(c_{j,-n}=c_{j,n}=0\), \(j=1,\ldots , m\). Now, the unknowns \(c_{j,k}\), \(A_{j}\), \(B_{j}\) and thus the approximate solutions \(y_{j,n}(x)\), \(j=1,\ldots , m\) can be determined via the solution of the linear system (3.9).
3.2 Volterra integro-differential system
In a similar manner, substituting \(\mathbf{Y}_{n}(x)\) from (3.4) into (1.2) and multiplying both sides by \(\frac{h^{2}}{\phi ^{\prime}}\), we have a relation for which after discretizing at the sinc grid points \(x_{l}\), \(l=-n,\ldots ,n\), can be written as
where \(\mathbf{c}_{k}\) ant \(\mathbf{T}^{(\gamma )}_{k}\) were already defined in (3.7).
Simplifying (3.10), we obtain the following system of linear equations with the unknowns \(c_{j,k}, k=-n,\ldots ,n\),
where we used \(c_{j,-n}=c_{j,n}=0 j=1,\ldots , m\). Solving the system of linear equations (3.11), the unknowns \(c_{j,k}\), \(A_{j}\), \(B_{j}\) and therefore the approximate solution \(y_{j,n}(x)\) for \(j=1,\ldots ,m\) can be obtained.
4 Error analysis
To be used in the following, let us define \(I^{(s)}=[\delta _{kl}^{(s)}]\) for \(s=0,1,2\), where \(\delta _{kl}^{s}=(-1)^{s}\delta _{lk}^{s}\), based on (2.11)-(2.13). Also, from (3.3), we get
and
First, we will establish the error analysis for the case of Fredholm-type problems, and it will be almost similar to the Volterra type.
4.1 Fredholm integro-differential system
With the above notations, the system of equations (3.9) can be rewritten in the following matrix form
where
with
and A is the \(m\times m\) block matrix
where \(A_{ij}=[a_{i,j}^{(l,k)}]_{{(2n+1)\times (2n+1)}}\) are the square matrices with
To be able to find a bound on the error \(\vert \mathbf{Y}(x)-\mathbf{Y}_{n}(x) \vert \), we need to obtain a bound on \(\|\mathbf{A}\hat{\mathbf{Y}^{*}}-\mathbf{q}\|\) where
and
Lemma 7
Let \(\phi ^{{\prime}^{2}}y_{j}^{*}\in B(D_{E})\) for \(j=1,\ldots ,m\), and for positive constants α, β, and c, we have
Let h be selected as (2.3), and the weight functions \(W_{j},j=1,\ldots , m\) are defined such that \(\frac{W_{j}(x)}{W_{j}(x_{k})}< c_{1}\), \(\frac{W_{j}^{\prime}(x)}{W_{j}(x_{k})}< c_{1}\) and \(\frac{W_{j}^{\prime \prime}(x)}{W_{j}(x_{k})}< c_{1}\), then we have
with the previously defended A, \(\hat{\mathbf{Y}^{*}}\), and q.
Proof
Assume that the kernels \(k_{j,\gamma},j=1,\ldots , m\), \(\gamma =0,1,2\), defined as
are associated with the modified nonclassical sinc functions. We can expand \(\hat{y_{j}^{*}}(x)=y_{j}^{*}(x)\phi ^{\prime}(x)\) as follows
where \(T^{(0)}_{j,k}(x)\) are defined by (3.8). Thus, we have
Let us define the form of the residual vector \(\mathbf{r}=\mathbf{A}\hat{\mathbf{Y}^{*}}-\mathbf{q}\) by
then, by replacing \(c_{j,k}\) with \(\hat{y_{j}^{*}}(x_{k})\) in (3.9), we have
Since \(\frac{h^{2}}{\phi ^{\prime}}(Ly_{j}-f_{i})=0\), by subtracting this relation from (4.5), we have
where
From (4.4), we deduce that
Also, for the mapping \(\phi (x)\), we have the following bounds
Note that on \(\partial D_{E}\), we have \(|I\phi (z)|=d\), thus by defining \(u(z)=R\phi (z)\) and using the bounds in (4.6) and lemmas assumptions on \(W_{j}\), we have
which results in
where the constant \(c_{2}\) is depending on h, d, and the on bounds in (4.6). Thus, we have
For the first term on right-hand side, we have
which the last inequality is obtained using (4.7), the bound \(\sinh (\frac{\pi d}{h} )\leq \sin ( \frac{\pi \phi (z)}{h} )\) on \(\partial D_{E}\) and the integrability of \(|\phi ^{\prime}\hat{y_{j}^{*}}|\).
Now for the second term on the right-hand side of (4.8), we can use relations (4.2) and (4.6) as follows
where \(\gamma _{kl}\) is defined by
Also, for the third term on the right-hand side of (4.8), we have
Finally, the fourth term on the right-hand side of (4.8) can be bounded using (2.6) as follows
Now using (4.9)-(4.12), we obtain the result
□
Theorem 8
Let \(\mathbf{Y}(x)\) and \(\mathbf{Y}_{n}(x)\) be the exact and the sinc-approximate solutions of (1.1)-(1.3), respectively. If all assumptions of lemma 7are holds, then we have the following bound
Proof
Let \(\eta (x)=[\eta _{1,n}(x),\ldots , \eta _{m,n}(x)]^{T}\), where functions \(\eta _{j,n}((x))\) are
From (3.5), we have
where \(\mathbf{u}_{n}(x)\) and \(\mathbf{v}(x)\) are the vectors defined before. Since \(\mathbf{Y}^{*}(x)=\mathbf{Y}(x)-\mathbf{v}(x)\), we obtain
Now we can use the triangular inequality on the relation above to obtain
By theorem 6 and the results in [39], we get
To find a bound on
we can use the Cauchy–Schwartz inequality to obtain
where the boundedness of \(\frac{1}{\phi ^{\prime}(x)}\) and \(\frac{\mathbf{W}(x)}{\mathbf{W}(x_{k})}< c_{1}\) are used to obtain the last relation. Now, from (4.3), we have
where \(\rho =\|A\|^{-1}\). Finally, combining the results (4.13)-(4.16), we deduce that
□
4.2 Volterra integro-differential system
The error analysis procedure for the Volterra case can be done similarly, except that in this case, the matrices \(A_{ij}\) are defined by \(A_{ij}=[a_{i,j}^{(l,k)}]_{{(2n+1)\times (2n+1)}}\), where
5 Numerical experiments
In this section, some problems will be tested using the nonclassical sinc collocation method, and the results will be compared with other existing methods. We choose \(\alpha =\frac{1}{2}\) and \(d=\frac{\pi}{2}\) to solve the examples.
To be able to compare the results with other existing methods, we obtain maximum absolute errors at equally spaced points
in the following form
where \(y_{i}(x)\) and \(y_{i,n}(x)\) are the exact and approximate solutions, respectively. All programs are written in Maple 2020, on a system with Intel Core i3 CPU and 4 GB of RAM.
Example 1
Consider the following problem
along with the initial conditions
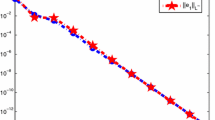
The exact solution is \(y_{1}(x)=\sin (x)\), \(y_{2}(x)=\cos (x)\). We solved this problem for various values of n with different kinds of weight functions and tabulated the maximum absolute errors at the equidistant points in Table 1. The errors have been compared with those in [5] based on a Laguerre approach. We solved the problem with \(n=10\) with different kinds of weight functions and tabulated the numerical approximations at equidistant points in Table 2. Table 3 shows the numerical results obtained by the Laguerre approach [5] with \(m=5\) to be compared with our results. The log-plot of the errors are plotted in Figs. 1 and 2 for different types of weight functions \(w_{1}\) and \(w_{2}\) to show the exponential rates of convergence.

The log-plot of errors for Example 1 with \(w_{1}=w_{2}=1\)

The log-plot of errors for Example 1 with \(w_{1}=1+x\), \(w_{2}=0.1+\sin (\pi x)\)
Example 2
Consider the following problem
connected with initial conditions
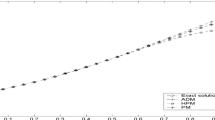
The exact solution is \(y_{1}(x)=e^{-x}\), \(y_{2}(x)=x^{2}e^{x}\), \(y_{3}(x)=x\). By defining \(w_{1}(x)=1+x\), \(w_{2}(x)=0.1+\sin (\pi x)\), \(w_{3}(x)=1+x\), we solved this problem with \(n=20\) and tabulated the approximate and exact solutions at equidistant points in Table 4. Table 5 contains the results obtained in [1] and [40] based on a single term Walsh series technique and spectral method at equidistant points. Comparing the results in Tables 4 and 5, we observe that our method is much more efficient. Finally, in Table 6, we tabulated the errors obtained by our method for different weight functions with \(n=20\) at equidistant points.
Example 3
Consider the following problem
along with the initial conditions
The exact solution is \(y_{1}(x)=\sqrt[3]{x^{4}} \), \(y_{2}(x)=\sqrt{x^{3}}\). It is obvious that the exact solution \(y_{1}\) is not differentiable at zero, indeed \(y_{1}\in C[0,1]\) only. So, many of the existing methods will get into trouble while trying to approximate the solution. The new sinc method based on nonclassical basis functions does not need the exact solution to be differentiable at the boundaries. Thus, it is expected to obtain good accuracy using the presented method for this problem. We approximated the solution with \(n=30\) using various kinds of weight functions, \(w_{1}=1\), \(w_{2}=1\) and \(w_{1}=1+\sin (x)\), \(w_{2}=1+x\), and tabulated the absolute errors at equidistant points in Table 7.
6 Conclusion
A method based on the nonclassical sinc collocation was used to solve the system of second-order linear integro-differential equations of both Volterra and Fredholm types. The classic sinc basis functions are not differentiable at zero, so we define the new nonclassical basis functions that are differentiable with zero derivative at zero. The new basis functions have been used to approximate the solution. Based on a theoretical analysis, it was shown that the new method achieves exponential convergence. It could be proved that, if accuracy is desired in the solution of a differential or integral equation, the complexity of solving a differential equation problem via a finite difference or finite element method is usually far larger than the corresponding complexity for sinc methods [41]. Also, it is proved that, while the h–p finite element method also enabled sinc-like exponential convergence, these methods do not converge as fast as sinc methods (see [42]). Some numerical examples with various kinds of basis functions have been solved and compared with existing methods confirming the theory in a good manner. It should be noted that the method could be easily extended to solve the fractional integro-differential equations based on the approach introduced in our previous papers [43, 44], and it is the subject of our future research.
Availability of data and materials
not applicable
References
Chandra Guru Sekar, R., Murugesan, K.: System of linear second order Volterra integro-differential equations using single term Walsh series technique. Appl. Math. Comput. 273, 484–492 (2016)
Zhao, J., Corless, R.M.: Compact finite difference method for integro-differential equations. Appl. Math. Comput. 177(1), 271–288 (2006)
Mirzaee, F., Bimesl, S.: Numerical solutions of systems of high-order Fredholm integro-differential equations using Euler polynomials. Appl. Math. Model. 39, 6767–6779 (2015)
Sahu, P.K., Saha Ray, S.: Legendre wavelets operational method for the numerical solutions of nonlinear Volterra integro-differential equations system. Appl. Math. Comput. 256, 715–723 (2015)
Elahi, Z., Akram, G., Siddiqi, S.S.: Laguerre approach for solving system of linear Fredholm integro-differential equations. Math. Sci. (2018). https://doi.org/10.1007/s40096-018-0258-0
Youssri, Y.H., Hafez, R.M.: Chebyshev collocation treatment of Volterra–Fredholm integral equation with error analysis. Arab. J. Math. 9, 471–480 (2020)
Mirzaee, F., Hoseini, S.S.: Solving systems of linear Fredholm integro-differential equations with Fibonacci polynomials. Ain Shams Eng. J. 5, 271–283 (2014)
Hafez, R.M., Youssri, Y.H.: Spectral Legendre-Chebyshev treatment of 2d linear and nonlinear mixed Volterra-Fredholm integral equation. Math. Sci. Lett. 9(2), 37–47 (2020)
Doha, E.H., Youssri, Y.H., Zaky, M.A.: Spectral solutions for differential and integral equations with varying coefficients using classical orthogonal polynomials. Bull. Iran. Math. Soc. 45(2), 527–555 (2019)
Arikoglu, A., Ozkol, I.: Solutions of integral and integro-differential equation system by using differential transform method. Appl. Math. Comput. 56(9), 2411–2417 (2008)
Abd-Elhameed, W.M., Youssri, Y.H.: Numerical solutions for Volterra-Fredholm-Hammerstein integral equations via second kind Chebyshev quadrature collocation algorithm. Adv. Math. Sci. Appl. 24, 129–141 (2014)
Mirzaee, F., Solhi, E., Naserifar, S.: Approximate solution of stochastic Volterra integro-differential equations by using moving least squares scheme and spectral collocation method. Appl. Math. Comput. 410(1), 126447 (2021)
Mirzaee, F., Alipour, S.: Cubic B-spline approximation for linear stochastic integro-differential equation of fractional order. J. Comput. Appl. Math. 336, 112440 (2020)
Mirzaee, F., Samadyar, N.: On the numerical solution of fractional stochastic integro-differential equations via meshless discrete collocation method based on radial basis functions. Eng. Anal. Bound. Elem. 100, 246–255 (2019)
Mirzaee, F., Samadyar, N.: Application of orthonormal Bernstein polynomials to construct a efficient scheme for solving fractional stochastic integro-differential equation. Optik 132, 262–273 (2017)
Mirzaee, F., Alipour, S.: A hybrid approach of nonlinear partial mixed integro-differential equations of fractional order. Iran. J. Sci. Technol. Trans. A, Sci. 44, 725–737 (2020)
Mirzaee, F., Alipour, S.: Numerical solution of nonlinear partial quadratic integro-differential equations of fractional order via hybrid of block-pulse and parabolic functions. Numer. Methods Partial Differ. Equ. 35(3), 1134–1151 (2018)
Mirzaee, F., Hoseini, S.F.: A new collocation approach for solving systems of high-order linear Volterra integro-differential equations with variable coefficients. Appl. Math. Comput. 311(15), 272–282 (2017)
Mirzaee, F., Bimesl, S.: An efficient numerical approach for solving systems of high-order linear Volterra integral equations. Sci. Iran. Trans. D 21(6), 2250–2263 (2014)
Maleknejad, K., Mirzaee, F.: Numerical solution of integro-differential equations by using rationalized Haar functions method. Kybernetes 35(10), 1735–1744 (2006)
Samadyar, N., Mirzaee, F.: Numerical scheme for solving singular fractional partial integro-differential equation via orthonormal Bernoulli polynomials. Int. J. Numer. Model. 32(6), e2652 (2019)
Bo, T., Xie, L., Jing Zheng, X.: Numerical approach to wind ripple in desert. Int. J. Nonlinear Sci. Numer. Simul. 8(2), 223–228 (2007)
Sun, F.Z., Gao, M., Lei, S.H., Zhao, Y.B., Wang, K., Shi, Y.T., Wang, N.H.: The fractal dimension of the fractal model of drop-wise condensation and its experimental study. Int. J. Nonlinear Sci. Numer. Simul. 8(2), 211–222 (2007)
Wang, H., Fu, H.M., Zhang, H.F., Hu, Z.Q.: A practical thermodynamic method to calculate the best glass-forming composition for bulk metallic glasses. Int. J. Nonlinear Sci. Numer. Simul. 8(2), 171–178 (2007)
Stenger, F.: Approximations via whittakers cardinal function. J. Approx. Theory 17, 222–240 (1976)
Stenger, F.: A sinc-Galerkin method of solution of boundary value problems. Math. Comput. 33, 85–109 (1979)
Stenger, F.: Numerical Methods Based on Sinc and Analytic Functions. Springer, New York (1993)
Mohsen, A., El-Gamel, M.: A sinc-collocation method for the linear Fredholm integro-differential equations. Z. Angew. Math. Phys. 58, 380–390 (2007)
Mohsen, A., El-Gamel, M.: On the numerical solution of linear and nonlinear Volterra integral and integro-differential equations. Appl. Math. Comput. 217, 3330–3337 (2010)
Zarebnia, M., Ali Abadi, M.G.: Numerical solution of system of nonlinear second-order integro-differential equations. Comput. Math. Appl. 60, 591–601 (2010)
Shizgal, B.: A Gaussian quadrature procedure for use in the solution of the Boltzmann equation and related problems. J. Comput. Phys. 41, 309–328 (1981)
Shizgal, B., Chen, H.: The quadrature discretization method (QDM) in the solution of the shrodinger equation with non-classical basis functions. J. Chem. Phys. 104(11), 4137–4150 (1996)
Zarebnia, M., Rashidinia, J.: Convergence of the sinc method applied to Volterra integral equations. Appl. Appl. Math. 5(1), 198–216 (2010)
Shizgal, B., Chen, H.: Convergence of approximate solution of system of Fredholm integral equations. J. Math. Anal. Appl. 333(2), 1216–1227 (2007)
Li, C., Wu, X.: Numerical solution of differential equations using sinc method based on the interpolation of the highest derivatives. Appl. Math. Model. 31, 1–9 (2007)
Lund, J., Bowers, K.: Sinc Methods for Quadrature and Differential Equations. SIAM, Philadelphia (1992)
Mohammadi, K., Alipanah, A., Ghasemi, M.: A nonclassical sinc-collocation method for the solution of singular boundary value problems arising in physiology. Int. J. Comput. Math. 99(2), 1941–1967 (2021)
Grenander, V., Szego, G.: Toeplitz Forms and Their Applications. Chelsea, New York (1985)
Bialecki, B.: Sinc-collocation methods for two-point boundary value problems. IMA J. Numer. Anal. 11, 357–375 (1991)
Al-Faour, O.M., Saeed, R.K.: Solution of a system of linear Volterra integro-differential equations by spectral method. Al-Nahrain Univ. J. Sci. 6(2), 30–46 (2006)
Stenger, F.: Summary of sinc numerical methods. J. Comput. Appl. Math. 121, 379–420 (2000)
Keinert, F.: Uniform approximation to \(|x|^{\beta}\) by sinc functions. J. Approx. Theory 66, 44–52 (1991)
Jalilian, Y., Ghasemi, M.: On the solutions of a nonlinear fractional integro-differential equation of pantograph type. Mediterr. J. Math. 14, 194 (2017)
Ghasemi, M., Jalilian, Y., Trujillo, J.J.: Existence and numerical simulation of solutions for nonlinear fractional pantograph equations. Int. J. Comput. Math. 94(10), 2041–2062 (2017)
Funding
This research does not receive specific funding. The corresponding author and the third author are full-time members of the Department of Mathematics, University of Kurdistan, Kurdistan, Iran.
Author information
Authors and Affiliations
Contributions
M.G. and K.M., methodology. K.M., original draft preparation. M.G. and A.A., supervision and project administration. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ghasemi, M., Mohammadi, K. & Alipanah, A. Numerical solution of system of second-order integro-differential equations using nonclassical sinc collocation method. Bound Value Probl 2023, 38 (2023). https://doi.org/10.1186/s13661-023-01724-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-023-01724-3