
Abstract
In this article, we propose an iterative method, called the GA iterative method, to approximate the fixed points of generalized α-nonexpansive mappings in uniformly convex Banach spaces. Further, we obtain some convergence results of the new iterative method. Also, we provide a nontrivial example of a generalized α-nonexpansive mapping and with the example, we carry out a numeral experiment to show that our new iterative algorithm is more efficient than some existing iterative methods. Again, we present an interesting strategy based on the GA iterative method to solve nonlinear third-order boundary value problems (BVPs). For this, we derive a sequence named the GA–Green iterative method and show that the sequence converges strongly to the fixed point of an integral operator. Finally, the approximation of the solution for a nonlinear integrodifferential equation via our new iterative method is considered. We present some illustrative examples to validate our main results in the application sections of this article. Our results are a generalization and an extension of several prominent results of many well-known authors in the literature.
Similar content being viewed by others

1 Introduction and main results
In this paper, \(\mathbb{N}\) denotes the set of all natural numbers and \(\mathbb{R}\) the set of real numbers. We assume that \(\mathscr{U}\) is a nonempty subset of a Banach space \(\mathscr{V}\). A fixed point of a mapping \(\mathscr{G}:\mathscr{U}\to \mathscr{U}\) is an element \(f\in \mathscr{U}\) such that \(\mathscr{G}f=f\). The fixed-point set of \(\mathscr{G}\) is denoted by \(F(\mathscr{G})=\{f\in \mathscr{U}:\mathscr{G}f=f\}\). The mapping \(\mathscr{G}\) is called a contraction if there exists a constant \(\beta \in [0,1)\) such that \(\|\mathscr{G}f-\mathscr{G}h\|\leq \beta \|f-h\|\), for all \(f,h\in \mathscr{U}\) and it is said to be nonexpansive if \(\|\mathscr{G}f-\mathscr{G}h\|\leq \|f-h\|\), for all \(f,h\in \mathscr{U}\). It is said to be quasinonexpansive if \(F(\mathscr{G})\neq \emptyset \) and \(\|\mathscr{G}f-\ell \|\leq \|f-\ell \|\), for all \(f\in \mathscr{U}\) and \(\ell \in F(\mathscr{G})\).
It is known that if \(\mathscr{U}\) is a closed, bounded, convex subset of a uniformly convex Banach space \(\mathscr{V}\), then \(F(\mathscr{G})\neq \emptyset \) for a nonexpansive mapping [5, 9]. The class of nonexpansive mappings has been studied deeply because of their diverse applications. In recent years, several authors have considered the extensions and generalizations of nonexpansive mappings.
In [33], Suzuki considered a fascinating generalization of nonexpansive mappings and studied some convergence and the existence results of fixed points for such mappings.
Definition 1.1
A mapping \(\mathscr{G}:\mathscr{U}\to \mathscr{U}\) is said to satisfy the condition \((C)\) if for all \(f,h\in \mathscr{U}\),
In 2011, Aoyama and Kohsaka [4] introduced the class of α-nonexpansive mappings in Banach spaces and studied the fixed-point theory of such mappings.
Definition 1.2
A mapping \(\mathscr{G}:\mathscr{U}\to \mathscr{U}\) is said to be α-nonexpansive if there exists an \(\alpha \in [0,1)\) such that for all \(f,h\in \mathscr{U}\),
With \(\alpha =0\), then it is not difficult to see that every nonexpansive mapping is an α-nonexpansive mapping.
In [28], Pant and Shukla introduced an important class of mappings that properly contains the class of mappings satisfying condition \((C)\) and further proved some fixed-point theorems. Such mappings are known as generalized α-nonexpansive mappings.
Definition 1.3
A mapping \(\mathscr{G}:\mathscr{U}\to \mathscr{U}\) is said to be generalized α-nonexpansive if there exists an \(\alpha \in [0,1)\) such that for each \(f,h\in \mathscr{U}\),
This class of mappings has been studied by several authors in recent years, see [8, 24, 36, 37].
The theory of fixed points is one of the most powerful and fascinating tools of modern mathematical analysis and has many applications in diverse fields such as optimization theory, physics, biology, economics, mathematical engineering, game theory, chemistry, approximation theory, and many others.
Since the location of fixed points can be obtained by means of iterative methods, several authors have introduced many iterative methods over the past two and half decades. Some of the well-known iterative methods are: Picard [29], Krasnosel’skii [19], Mann [22], Ishikawa [11], Noor [23], Picard–Man [15], Abbas [1], Agarwal [2], Thakur [34], and Picard–Ishikawa [25] iterative methods.
The Mann iterative method [22] is constructed as follows:
where \(\{p_{m}\}\) is a sequence in \((0,1)\).
In 1974, Ishikawa [11] constructed a two-step iterative method for approximating fixed points of nonexpansive mappings as follows:
where \(\{q_{m}\}\) and \(\{p_{m}\}\) are sequences in \((0,1)\).
In 2000, Noor [23] proposed a three-step iterative method that is an extension of the Mann and Ishikawa iterative methods as follows:
where \(\{q_{m}\}\), \(\{p_{m}\}\), and \(\{y_{m}\}\) are sequences in \((0,1)\).
In 2007, Agarwal et al. [2] modified the Ishikawa iteration method, called the S iteration as follows:
where \(\{q_{m}\}\) and \(\{p_{m}\}\) are sequences in \((0,1)\). The authors showed that this iterative algorithm converges faster than the Mann iterative method for contraction mappings.
In 2013, Khan [15] introduced the Picard–Mann iterative method as follows:
where \(\{p_{m}\}\) is a sequence in \((0,1)\).
Abbas and Nazir [1], in 2014 defined an iterative method that converges faster than the S iterative method as follows:
where \(\{q_{m}\}\), \(\{p_{m}\}\), and \(\{y_{m}\}\) are sequences in \((0,1)\).
In 2016, Thakur et el. [34] developed a new iterative method as follows:
where \(\{q_{m}\}\) and \(\{p_{m}\}\) are sequences in \((0,1)\). They proved that (1.10) converges faster than all of Mann, Ishikawa, Noor, S, and Abbas and Nazir iterative methods.
Very recently, Okeke [25] introduced the Picard–Ishikawa iterative method as follows:
where \(\{q_{m}\}\) and \(\{p_{m}\}\) are sequences in \((0,1)\). The author showed that the Picard–Ishikawa iterative method (1.11) converges faster than all of Picard, Krasnosel’skii, Mann, Ishikawa, Noor, Picard–Mann, and Picard–Krasnosel’skii iterative methods.
In this study, we propose the following iterative method, called the GA iterative method:
where \(\{q_{m}\}\) and \(\{p_{m}\}\) are sequences in \((0,1)\).
We prove both weak and strong convergence results concerning the convergence of the GA iterative scheme (1.12) to fixed points of generalized α-nonexpansive mappings. Furthermore, we show numerically via a nontrivial example that the GA iterative method (1.12) enjoys a better rate of convergence than the iterative methods (1.4)–(1.11) for generalized α-nonexpansive mappings. Again, we present an interesting pattern based on the GA iterative method to solve nonlinear third-oder BVPs. In view of this, we derive a sequence named GA–Green iteration and show that the sequence converges strongly to the fixed point of an integral operator. Furthermore, we approximate the solution of a nonlinear integrodifferential equation via our new iterative method. We present some illustrative examples to validate our main results in the application sections.
2 Lemmas and definition
The following definitions and lemmas will be very useful in proving our main results.
Definition 2.1
Opial’s condition is said to be satisfied by a Banach space \(\mathcal{V}\), if for any sequence \(\{f_{m}\}\) in \(\mathcal{V}\) that is weakly convergent to \(f\in \mathcal{V}\) implies
Definition 2.2
A Banach space \(\mathcal{V}\) is called uniformly convex if for all \(\epsilon \in (0,2]\), then a constant \(\delta >0\) exists such that for \(f,h\in \mathcal{V}\) satisfying \(\|f\|\leq 1\), \(\|h\|\leq 1\) and \(\|f-h\|>\epsilon \), we obtain \(\Vert \frac{f+h}{2} \Vert <1-\delta \).
Let \(\mathcal{U}\) stand for a nonempty, closed, and convex subset of a Banach space \(\mathcal{V}\). Let \(\{f_{m}\}\) be a bounded sequence in \(\mathcal{V}\). For \(f\in \mathcal{V}\), we put
The asymptotic radius of \(\{f_{m}\}\) relative to \(\mathcal{U}\) is defined by
The asymptotic center of \(\{f_{m}\}\) relative to \(\mathcal{U}\) is given as
It is well known that in a uniformly convex Banach space, \(A(\mathcal{U},\{f_{m}\})\) consists of exactly one point.
Let \(\mathcal{U}\) stand for a nonempty, closed, and convex subset of a Banach space \(\mathcal{V}\). A mapping \(\mathscr{G}:\mathcal{U}\to \mathcal{U}\) is said to be demiclosed with respect to \(f\in \mathcal{V}\), if for each sequence \(\{f_{m}\}\) that converges weakly to \(f\in \mathcal{U}\) and \(\{\mathscr{G}f_{m}\}\) converges strongly to h implies that \(\mathscr{G}f=h\).
Lemma 2.3
([38])
Let \(\{ \mathfrak{\theta}_{m}\}\) be a nonnegative real sequence satisfying the following inequality:
where \(\sigma _{m}\in (0,1)\) for all \(m\in \mathbb{N}\) and \(\sum_{m=0}^{\infty}\sigma _{m}=\infty \), then \(\lim_{m\to \infty} \mathfrak{\theta}_{m}=0\).
Lemma 2.4
([32])
Let \(\{ \mathfrak{\theta}_{m}\}\) and \(\{\lambda _{m}\}\) be nonnegative real sequences satisfying
where \(\sigma _{m}\in (0,1)\) for all \(m\in \mathbb{N}\), \(\sum_{m=0}^{\infty}\sigma _{m}=\infty \) and \(\lambda _{m}\geq 0\) for all \(m\in \mathbb{N}\), then
Definition 2.5
([31])
A mapping \(\mathscr{G}:\mathcal{U}\to \mathcal{U}\) is said to satisfy condition \((I)\) if there exists a nondecreasing function \(g:[0,\infty )\to [0,\infty )\) with \(g(0)=0\) and, \(g(s)>0\) for each \(s>0\) such that \(\|f-\mathscr{G}f\|\geq g(d(f,\Im (\mathscr{G})))\) for each \(f\in \mathcal{U}\), where \(d(f,\Im (\mathscr{G}))=\inf_{\ell \in \Im (\mathscr{G})}\|f-\ell \|\).
Lemma 2.6
([30])
Suppose \(\mathcal{V}\) is a uniformly convex Banach space and \(\{\iota _{m}\}\) is any sequence satisfying \(0< f\leq \iota _{m}\leq h<1\) for all \(m\geq 1\). Suppose \(\{f_{m}\}\) and \(\{h_{m}\}\) are any sequences of \(\mathcal{V}\) such that
for some \(x\geq 0\). Then, \(\lim_{m\to \infty}\|f_{m}-h_{m}\|=0\).
Proposition 2.7
([28])
Let \(\mathcal{U}\) stand for a nonempty subset of a Banach space \(\mathcal{V}\). Assume \(\mathscr{G}:\mathcal{U}\to \mathcal{U}\) is any mapping.
-
(i)
If \(\mathscr{G}\) is a mapping satisfying condition (C), then \(\mathscr{G}\) is a generalized α-nonexpansive mapping.
-
(ii)
If \(\mathscr{G}\) is a generalized α-nonexpansive mapping with a nonempty fixed point set, then \(\mathscr{G}\) is a quasinonexpansive mapping.
-
(iii)
If \(\mathscr{G}\) is a generalized α-nonexpansive mapping, then \(F(\mathscr{G})\) is closed. Moreover, if \(\mathcal{V}\) is strictly convex and \(\mathcal{U}\) is convex, then \(F(\mathscr{G})\) is also convex.
-
(iv)
If \(\mathscr{G}\) is a generalized α-nonexpansive mapping, then
$$\begin{aligned} \Vert f-\mathscr{G}h \Vert \leq \biggl(\frac{3+\alpha}{1-\alpha} \biggr) \Vert f- \mathscr{G}f \Vert + \Vert f-h \Vert ,\quad \forall f,h\in \mathcal{U}. \end{aligned}$$
3 Proof of the main results
In this section, we will establish and prove our main results.
3.1 Weak and strong convergence theorems
In this section, we establish and prove some convergence theorems of the GA iterative method (1.12) for generalized α-nonexpansive mappings. Further, we present a nontrivial example of generalized α-nonexpansive mappings to analyze the convergence rate of the GA iterative method (1.12) with some existing iterative methods.
Theorem 3.1
Let \(\mathscr{G}:\mathscr{U}\to \mathscr{U}\) be a generalized α-nonexpansive mapping defined on a nonempty, closed, and convex subset \(\mathscr{U}\) of a Banach space \(\mathscr{V}\). Let \(\{f_{m}\}\) be a sequence defined by the GA iterative method (1.12), then \(\lim_{m\to \infty}\|f_{m}-\ell \|\) exists for all \(\ell \in F(\mathscr{G})\).
Proof
Let \(\ell \in F(\mathscr{G})\), then using (1.12) and Proposition 2.7(ii), we have
Also, from (3.1), we obtain
Now, by (3.2), we obtain
Hence, using (3.3), we obtain
Finally, using (3.4), we have
which implies that the sequence \(\{\|f_{m}-\ell \|\}\) is decreasing and bounded. Thus, \(\lim_{m\to \infty}\|f_{m}-\ell \|\) exists for all \(\ell \in F(\mathscr{G})\). □
Theorem 3.2
Let \(\mathscr{G}\), \(\mathscr{U}\), \(\mathscr{V}\), and \(\{f_{m}\}\) be defined as in Theorem 3.1. Then, \(F(\mathscr{G})\neq \emptyset \) if and only if the sequence \(\{f_{m}\}\) is bounded and \(\lim_{m\to \infty}\|\mathscr{G}f_{m}-f_{m}\|=0\).
Proof
By Theorem 3.1, we have shown that \(\{f_{m}\}\) is bounded and \(\lim_{m\to \infty}\|f_{m}-\ell \|\) exists for any \(\ell \in F(\mathscr{G})\). Let
then using (3.1) and (3.5), we have
Since a generalized α-nonexpansive mapping with a nonempty fixed point set \(F(\mathscr{G})\neq \emptyset \) is a quasinonexpansive mapping, we obtain
On the one hand, using (1.12), we have
which implies that
Hence,
which yields
Therefore,
From (3.6) and (3.12), we have
Using (3.5), (3.7), (3.13), and Lemma 2.6, we have
Conversely, let \(\ell \in A(\mathscr{U},\{f_{m}\})\). Then,
This implies that \(\mathscr{G}\ell \in A(\mathscr{U},\{f_{m}\})\). Since \(\mathscr{V}\) is uniformly convex, then \(A(\mathscr{U},\{f_{m}\})\) is a unit set and therefore, we have \(\mathscr{G}\ell =\ell \). Hence, \(F({\mathscr{G}})\neq \emptyset \). □
Theorem 3.3
Let \(\mathscr{G}\), \(\mathscr{U}\), \(\mathscr{V}\), and \(\{f_{m}\}\) be defined as in Theorem 3.1such that \(F(\mathscr{G})\neq \emptyset \). Suppose that \(\mathscr{V}\) satisfies Opial’s property, then \(\{f_{m}\}\) converges weakly to a member of \(F(\mathscr{G})\).
Proof
Since \(\mathscr{G}\) is a generalized α-nonexpansive mapping with \(F(\mathscr{G})\neq \emptyset \), then by Theorem 3.1 and Theorem 3.2, we have that \(\lim_{m\to \infty}\|f_{m}-\ell \|\) exists and \(\lim_{m\to \infty}\|\mathscr{G}f_{m}-f_{m}\|=0\). Next, we will prove that \(\{f_{m}\}\) have exactly one weakly subsequential limit in \(F(\mathscr{G})\). Let  and ℏ be two weak subsequential limits of \(\{f_{m_{j}}\}\) and \(\{f_{m_{k}}\}\), respectively. By Theorem 3.2, the demiclosedness of \((I-\mathscr{G})\) at 0 implies that
and ℏ be two weak subsequential limits of \(\{f_{m_{j}}\}\) and \(\{f_{m_{k}}\}\), respectively. By Theorem 3.2, the demiclosedness of \((I-\mathscr{G})\) at 0 implies that  . Hence,
. Hence,  and similarly, \(\mathscr{G}\hslash =\hslash \). Now, we have to show the uniqueness. Suppose
and similarly, \(\mathscr{G}\hslash =\hslash \). Now, we have to show the uniqueness. Suppose  , then from Opial’s property, one has
, then from Opial’s property, one has

which is a contradiction, so  . Hence, \(\{f_{m}\}\) converges weakly to a fixed point of \(\mathscr{G}\). □
. Hence, \(\{f_{m}\}\) converges weakly to a fixed point of \(\mathscr{G}\). □
Theorem 3.4
Let \(\mathscr{G}\), \(\mathscr{U}\), \(\mathscr{V}\), and \(\{f_{m}\}\) be defined as in Theorem 3.1such that \(F(\mathscr{G})\neq \emptyset \). Then, \(\{f_{m}\}\) converges strongly to a fixed point of \(\mathscr{G}\) if and only if \(\lim_{m\to \infty}d(f_{m},F({\mathscr{G}}))=0\), where \(d(f,F(\mathscr{G}))=\inf \{\|f-\ell \|:\ell \in F(\mathscr{G})\}\).
Proof
The necessity is trivial and will be neglected. Next, we will prove the convex case. If for any \(\ell \in F(\mathscr{G})\), \(\liminf_{m\to \infty} d(f_{m},F(\mathscr{G}))=0\). By Theorem 3.1, we have that \(\lim_{m\to \infty}\|f_{m}-\ell \|\) exists for each \(\ell \in F(\mathscr{G})\) and it follows that \(\liminf_{m\to \infty} d(f_{m}, F(\mathscr{G}))=0\). Now, we claim that \(\{f_{m}\}\) is a Cauchy sequence in \(\mathscr{U}\). Owing to the fact that \(\liminf_{m\to \infty} d(f_{m},F(\mathscr{G}))=0\) in as much as for any \(\wp >0\), there exists \(m_{0}\in \mathbb{N}\) such that for all \(m\geq m_{0}\)
Hence, \(\inf \{\|f_{m_{0}}-\ell \|:\ell \in F(\mathscr{G})\}<\frac{\wp}{2}\). Therefore, there exists \(\ell \in F(\mathscr{G})\) such that
For \(c,m\geq m_{0}\), we have
This implies that \(\{f_{m}\}\) is a Cauchy sequence in \(\mathscr{U}\). From the completeness of \(\mathscr{U}\), we have \(\lim_{m\to \infty}f_{m}=q\) for some \(q\in \mathscr{U}\). Also, \(\lim_{m\to \infty}d(f_{m},F(\mathscr{G}))=0\) shows that \(q\in F(\mathscr{G})\). □
Theorem 3.5
Let \(\mathscr{G}\), \(\mathscr{U}\), \(\mathscr{V}\), and \(\{f_{m}\}\) be defined as in Theorem 3.1such that \(F(\mathscr{G})\neq \emptyset \). If \(\mathscr{U}\) is compact, then \(\{f_{m}\}\) converges strongly to any \(\ell \in F(\mathscr{G})\).
Proof
Since \(F(\mathscr{G})\neq \emptyset \), we have shown in Theorem 3.2 that \(\lim_{m\to \infty}\|\mathscr{G}f_{m}-f_{m}\|=0\). Due to the compactness of C, one can have a subsequence \(\{f_{m_{j}}\}\) of \(\{f_{m}\}\) such that \(\lim_{m\to \infty}f_{m_{j}}\to \ell \in \mathscr{U}\). By Proposition 2.7, we have
On taking \(j\to \infty \), \(\mathscr{G}\ell =\ell \), i.e., \(\ell \in F(\mathscr{G})\). From Theorem 3.1, \(\lim_{m\to \infty}\|f_{m}-\ell \|\) exists for every \(\ell \in F(\mathscr{G})\) and so the sequence \(\{f_{m}\}\) converges strongly to ℓ. □
Theorem 3.6
Let \(\mathscr{G}\), \(\mathscr{U}\), \(\mathscr{V}\), and \(\{f_{m}\}\) be defined as in Theorem 3.1such that \(F(\mathscr{G})\neq \emptyset \). If condition \((I)\) is satisfied by \(\mathscr{G}\), then \(\{f_{m}\}\) converges strongly to a fixed point of \(\mathscr{G}\).
Proof
By Theorem 3.2, we have that
By condition (I) and (5.11), we have
i.e., \(\lim_{m\to \infty}g(d(f_{m},F(G)))=0\). Since g is a nondecreasing function such \(g(0)=0\), \(g(s)>0\), for each \(s\in (0,\infty )\), then we obtain
By Theorem 3.4, we know that the sequence \(\{f_{m}\}\) converges strongly to a point of \(F(\mathscr{G})\). □
Now, we perform a numerical experiment using a generalized α-nonexpansive mapping that is not a Suzuki generalized nonexpansive mapping.
Example 3.7
Let \(\mathscr{V}=\mathbb{R}\) and \(\mathscr{U}=[3,6]\). Let the mapping \(\mathscr{G}:\mathscr{U}\to \mathscr{U}\) be defined by
Now, we show that \(\mathscr{G}\) is a generalized α-nonexpansive mapping for \(\alpha =\frac{1}{3}\). To show that, the following cases are considered:
Case (a): If \(f,h\in [3,4]\), we obtain
Case (b): If \(f\in [3, 4]\) and \(h \in (4, 6]\), then
Case (c): If \(f,h\in (4,6]\), then
From all the above-illustrated cases, we know that \(\mathscr{G}\) is a generalized α-nonexpansive mapping for \(\alpha =\frac{1}{3}\). Now, we show that \(\mathscr{G}\) does not fulfill condition \((C)\). If we take \(f=\frac{39}{10}\) and \(h=\frac{29}{7}\), then
On the other hand,
Thus, \(\mathscr{G}\) does not satisfy condition \((C)\).
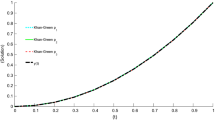
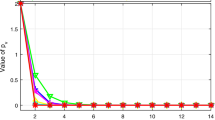
Next, using the above example and taking \(p_{m}=q_{m}=y_{m}=\frac{n+2}{n+3}\) for \(m\in \mathbb{N}\) and \(f_{0}=4\), then we obtain Tables 1 and 2, and Figs. 1 and 2.

Graph corresponding to Table 1

Graph corresponding to Table 2
Clearly, from the above tables and figures, all the iterative methods converge to \(\ell =3\) and the GA iterative method converges faster to \(\ell =3\) than all the others.
4 An application to nonlinear third-order BVPs
A BVP for a given differential equation involves finding a solution of the given differential equation subject to a given set of boundary conditions.
BVPs emanate in many branches of physics as any physical differential equation will have them. Problems involving wave equations are in most cases expressed as BVPs. Several important BVPs include Sturm–Liouville problems.
The third-order differential equations occur in diverse areas of physics and applied mathematics, for example, a three-layer beam, in the deflection of a curved beam having a constant or varying cross section, gravity-driven flows or electromagnetic waves. Third-order BVPs were discussed in many papers in recent years, for instance, see [6, 14, 21, 35] and references therein.
Solutions of BVPs can sufficiently be approximated by some efficient numerical methods. Some of these are the finite-difference method, the standard 5-point formula, the standard analytic method, and the iterative method.
In recent years, several iterative methods based on Green’s function have been developed for solving second- and third-order nonlinear BVPs. Some of these are Picard–Green, Krasnosel’skii–Green, Mann–Green, Ishikawa–Green, and Khan–Green iterative methods, e.g., see [12, 13, 16, 18] and the references therein.
Very recently, Khuri and Louhichi [17] presented a fascinating approach that is based on embedding Green’s function into the Ishikawa iterative method for solutions of nonlinear third-order BVPs.
Motivated by the above results, in this section, we present a strategy based on the GA iterative method (1.12) to solve a nonlinear third-order BVP in the form of a Green’s function.
4.1 Brief demonstration of Green’s functions
Consider the following general linear third-order BVP,
where \(a\leq \psi \leq b\) and subject to the boundary conditions:
where \(c=a\) or b.
The Green’s function is defined to be the solution for the following equation
where δ is the Kronecker Delta that is subject to \(B_{1}[G(\psi ,s)]=B_{2}[G(\psi ,s)]=B_{3}[G(\psi ,s)]=0\). It is worth noting that for operators that are not self-adjoint, the right-hand side of (4.3) will be replaced by \(-\delta (\psi -s)\). For \(\psi \neq s\), we solve \(Li[G(\psi ,s)]=0\) and obtain
where \(\eta _{1}\), \(\eta _{2}\), \(\eta _{3}\) are linearly independent solutions of \(Li[\eta ]=0\) and the constants are derived through the following properties:
- \((V_{1})\):
-
G satisfies the associated homogeneous boundary conditions
$$ B_{1}\bigl[G(\psi ,s)\bigr]=B_{2}\bigl[G(\psi ,s)\bigr]=0, $$(4.4) - \((V_{2})\):
-
Continuity of G at \(\psi =s\):
$$ e_{1}\eta _{1}(s)+e_{2}\eta _{2}(s)+e_{3} \eta _{3}(s)=d_{1}\eta _{1}(s)+d_{2} \eta _{2}(s)+d_{3}\eta _{3}(s), $$(4.5) - \((V_{3})\):
-
Continuity of \(G'\) at \(\psi =s\):
$$ e_{1}\eta '_{1}(s)+e_{2}\eta '_{2}(s)+e_{3}\eta '_{3}(s)=d_{1} \eta '_{1}(s)+d_{2} \eta '_{2}(s)+d_{3} \eta '_{3}(s), $$(4.6) - \((V_{4})\):
-
At \(\psi =s\), \(G''\) has a jump discontinuity:
$$ \frac{1}{g(s)}+e_{1}\eta ''_{1}(s)+e_{2} \eta ''_{2}(s)+e_{3}\eta ''_{3}(s)=d_{1} \eta ''_{1}(s)+d_{2}\eta ''_{2}(s)+d_{3}\eta ''_{3}(s). $$(4.7)
4.2 GA–Green iterative method
Applying the Green’s function to the GA iterative method (1.12), the following differential equation will be considered:
where \(Li[\rho ]\) and \(No[\rho ]\) are linear and nonlinear operators in ρ, respectively, and \(\varphi (\psi ,\rho )\) is a function in ρ that could be linear or nonlinear.
We now define the following linear integral operator in terms of Green’s function as follows:
where G is the Green’s function that is corresponding to the linear differential operator \(Li[\rho ]\). Observe that Ψ has a fixed point if and only if ρ is a solution of (4.8).
From (4.9), we have the following:
Now, by applying the GA iterative method (1.11), we obtain
where \(\{q_{m}\}\) and \(\{p_{m}\}\) are sequences in \([0,1]\). Then, for all \(m\in \mathbb{N}\), this leads to
Thus, we have
Remark 4.1
Our new iterative method (4.12) is independent of all Picard–Green, Mann–Green, Ishikawa–Green, and Khan–Green iterative methods that are already existing in the literature.
4.3 Convergence result
In this section, we prove the convergence theorem of the proposed iterative method (4.12). Without loss of generality, we will consider the convergence analysis of our method for the following nonlinear BVP:
Solving the associated homogeneous equation \(\eta ^{\prime \prime \prime }=0\) implies
The unknowns \(e_{1}\), \(e_{2}\), \(e_{3}\), \(d_{1}\), \(d_{2}\), and \(d_{3}\) can be obtained using the properties \((V_{1})\)–\((V_{4})\). After finding the unknowns, we then have the following Green’s function:
Thus, the GA–Green iterative method (4.12) now has the form:
where the initial iterate \(f_{0}\) fulfilled the corresponding equation \(f^{\prime \prime \prime }=0\) and the boundary conditions \(f_{0}(1)=Q\), \(f''_{0}(1)=P\), and \(f_{0}(2)=W\). Next, we define the operator \(\Upsilon _{G}:C^{2}([1,2])\to C^{2}([1,2])\) by
Then, (4.15) reduces to the following form
On the other hand, by using the method of integration by parts three times to evaluate \(\int _{1}^{2}G(\psi ,s)f^{\prime \prime \prime }(s)\,ds \) in (4.16) and since \(\int _{1}^{2}\frac{\partial ^{3}G}{\partial ^{3}s^{3}}(\psi ,s)f(s)\,ds= \int _{1}^{2}\delta (\psi -s)f(s)\,ds\), we have that
Our next target is to prove that under some mild conditions on the function φ, the integral operator \(\Upsilon _{G}\) is a contraction on the Banach space \(C^{2}([1,2])\) with respect to the norm \(\|f\|_{C_{2}}=\sum_{i=0}^{2}\sup_{[1,2]} \vert f^{(i)} \vert \).
Theorem 4.2
Suppose that the function φ, which appears in the definition of the operator \(\Upsilon _{G}\), fulfills the following Lipschitz condition:
where \(\varTheta _{1}\), \(\varTheta _{2}\), and \(\varTheta _{3}\) are positive constants satisfying
Then, \(\Upsilon _{G}\) is a contraction on the Banach space \((C^{2}([1,2]),\|\cdot \|_{C^{2}})\) and the sequence \(\{f_{m}\}\) defined by the GA–Green iterative method (4.17) converges strongly to the fixed point of \(\Upsilon _{G}\).
Proof
Let \(f_{1}, f_{2} \in C^{2}([1,2]) \). Then, by (4.19), we obtain
where \(v=\frac{1}{8}\max \{\varTheta _{1},\varTheta _{2},\varTheta _{3}\}<1\). Thus, \(\Upsilon _{G}\) is a contraction.
Next, we prove that the sequence \(\{f_{m}\}\) defined by the GA–Green iterative method (4.17) converges strongly to the fixed point of \(\Upsilon _{G}\). Since \(\Upsilon _{G}\) is a contraction, then by the Banach contraction principle, we know that \(\Upsilon _{G}\) has a unique fixed point in \((C^{2}([1,2]),\|\cdot \|_{C^{2}})\), say ℓ. We will now show that \(f_{m}\to \ell \) as \(m\to \infty \). Using (4.17), we have
Using (4.21), we have
Also, using (4.22), we obtain
Since \(0<\beta <1\) and \(p_{m},q_{m}\in [0,1]\), then it follows that
Thus, using (4.24), (4.23) becomes
By (4.25), we obtain
Finally, from (4.26), we obtain
By induction, we have
Since \(0<\beta <1\), then we have that \(\{f_{m}\}\) converges strongly to ℓ. □
5 An application to nonlinear Volterra delay integrodifferential equations
In this section, we consider the following delay nonlinear Volterra integrodifferential equation:
where \(I=[0,\varpi ]\), \(\varpi >0\) and \(\varphi \in C([-z,0],\mathbb{R})\).
A function \(g\in C([-z,\varpi ], \mathbb{R})\cap C^{\prime}([0,\varpi ], \mathbb{R}) \) satisfying (5.1)–(5.2) is called a solution of the initial value problem (IVP) (5.1)–(5.2).
Assume that the following assumptions hold:
- (\(A_{1}\)):
-
Let \(g\in C([0,\varpi ]\times \mathbb{R}^{3},\mathbb{R})\), \(\wp \in C([0,\varpi ]\times [0,\varpi ]\times \mathbb{R}^{2}, \mathbb{R})\) and \(\vartheta \in C([0,\varpi ],[-z,\varpi ])\) be such that \(\vartheta (s)\leq s\).
- (\(A_{2}\)):
-
The constants \(L_{g},L_{\wp}>0\) exist such that
$$\begin{aligned}& \bigl\vert g(s,b_{1},b_{2},b_{3})-g(s,d_{1},d_{2},d_{3}) \bigr\vert \leq L_{g}\bigl( \vert b_{1}-d_{1} \vert + \vert b_{2}-d_{2} \vert + \vert b_{3}-d_{3} \vert \bigr); \\& \bigl\vert \wp (s,k,b_{1},b_{2})-\wp (s,k,d_{1},d_{2}) \bigr\vert \leq L_{\wp}\bigl( \vert b_{1}-d_{1} \vert + \vert b_{2}-d_{2} \vert \bigr) \end{aligned}$$for all \(s,k\in I\), \(b_{i},d_{i}\in \mathbb{R}\) (\(i=1,2,3\)).
- (\(A_{3}\)):
-
\(\varpi L_{g}[2+L_{\wp }\varpi ]<1\).
- (\(A_{4}\)):
-
There exists a constant \(\zeta >0\) such that the positive, nondecreasing, and continuous function \(\psi :[-z,\varpi ]\to [0,\infty )\) satisfies
$$\begin{aligned} \int _{0}^{s}\psi (k)\,dk\leq \zeta \phi (s),\quad s \in [0,\varpi ]. \end{aligned}$$(5.3)
Apparently, from condition \((A_{1})\), the IVP (5.1)–(5.2) is equivalent to the following equations:
In [20], Kucche and Shikhare studied the existence and uniqueness results concerning the solution of the problem (5.1)–(5.2) as follows.
Theorem 5.1
Suppose the conditions \((A_{1})\)–\((A_{4})\) are fulfilled, then the problem (5.1)–(5.2) has a unique solution and the equation (5.1) is generalized Ulam–Hyers–Rassias stable with respect to the function ψ.
Our main aim in this section is to solve the delay nonlinear Volterra integrodifferential equation (5.1)–(5.2) via a new efficient iterative method (1.12). In view of this, we state and prove the following theorem.
Theorem 5.2
Let \(\{f_{m}\}\) be the sequence defined by (1.12) with \(p_{m},q_{m}\in (0,1)\) satisfying \(\sum_{m=0}^{\infty}p_{m}=\infty \). If the assumptions \((A_{1})\)–\((A_{3})\) hold, then the IVP (5.1)–(5.2) has a unique solution, say, ℓ in \(C([-z,\varpi ], \mathbb{R})\cap C^{\prime}([0,\varpi ], \mathbb{R}) \) and \(\{f_{m}\}\) converges to ℓ.
Proof
Note that \(\mathscr{B}= C ([-z, \varpi ],\mathbb{R})\) endowed with the Chebyshev norm \(\|\cdot \|_{C}\) is a Banach space. Let \(\{f_{m}\}\) be the sequence defined by the iterative method (1.12) for the operator \(T:\mathscr{B}\to \mathscr{B}\) defined by
Let ℓ denote the fixed point of T. Next, we show that \(f_{m}\to \ell \) as \(m\to \infty \). It is clear that for \(s\in [-z,0]\), \(f_{m}\to \ell \) as \(m\to \infty \). Now, for \(s\in I\), we have
and
and
and
and
Using (5.4), (5.5), (5.6), (5.7), and (5.8), we obtain
Using assumption (\(A_{3}\)), we obtain
Now, define \(\sigma _{m}=p_{m}(1-\varpi L_{g}(2+L_{\wp }\varpi ))<1\), then \(\sigma _{m}\in (0,1)\) such that \(\sum_{m=0}^{\infty}\sigma _{m}=\infty \) and set \(\theta _{m}=\|f_{m}-\ell \|_{C}\). Observe that (5.10) takes the form
Thus, all the assumptions of Theorem 3.1 are fulfilled. Hence, \(\lim_{m \to \infty}\|f_{m}-\ell \|=0\). □
Next, we give an example to validate our main result obtained in Theorem 5.2 as follows.
Example
Consider the delay nonlinear Volterra integrodifferential equation defined as follows:
where \(\vartheta (s)=\frac{s}{3}\), \(s\in [-1,0]\). Clearly, we know that \(\vartheta (s)\leq s\), \(s\in [0,2]\). (i) Define \(\vartheta :[0,2]\times [0,2]\times \mathbb{R}\times \mathbb{R} \times \mathbb{R}\) by
Thus, for all \(s,k\in [0,2]\) and \(f_{1},f_{2},h_{1},h_{2}\in \mathbb{R}\), we have
(ii) Again, we define \(f:[0,2]\times \mathbb{R}\times \mathbb{R}\times \mathbb{R}\to \mathbb{R}\) by
Then, for all \(s\in [0,2]\) and \(f_{1},f_{2},f_{3},h_{1},h_{2},h_{3}\in \mathbb{R}\) and by the mean-value theorem, we obtain
It is easy to see that the above-defined functions g and ℘ fulfill the conditions \((A_{1})\) and \((A_{2})\) with \(L_{g} = \frac{2}{12}\), \(L_{\wp }=\frac{2}{12}\). Again, it is true that \(\varpi L_{g}(2 + \varpi L_{\wp}) = 2\cdot \frac{2}{12}(2+2\cdot \frac{2}{12})=\frac{112}{144}<1\). Thus, condition \((A_{3})\) holds. Now, if we choose \(p_{m}=\frac{1}{m}\), then it follows that \(\sum_{m=0}^{\infty}p_{m}=\infty \).
In addition, it is obvious that the exact solution of the problem (5.11)–(5.12) is the function
Remark 5.3
For given fixed \(z>0\), and define \(\vartheta _{1}(s)=s-z\), \(s\in [0,k]\). Then, the special case of the problem (5.1)–(5.2) is obtained as follows:
which is an initial IVP for a nonlinear Volterra integrodifferential equation.
There exist several results concerning the approximation of the solution of the problem (5.15)–(5.16) for \(\wp _{1}(s,k,f(k),f(k-z))=0\) (see [3, 7, 10, 24–27, 36]). It follows that our result in Theorem 5.2 is a generalization of the corresponding results in [3, 7, 10, 24–27, 36] and so are many others in the existing literature.
6 Conclusions
In this paper, we have introduced a five-step iterative method (1.12) for approximating the fixed points of generalized α-nonexpansive mappings. Furthermore, we studied the weak and strong convergence theorems of the new iterative method. Again, a numerical experiment that was carried out showed that our new iterative method has a better speed of convergence than several existing iterative methods. We also utilized our iterative method to find the solutions of nonlinear third-order BVPs based on Green’s function and a delay nonlinear Volterra integrodifferential equation. A nontrivial example that authenticates the assumptions used in our main result of Theorem 5.2 is provided. The delay nonlinear Volterra integrodifferential equation (5.1)–(5.2) studied in this manuscript properly includes the nonlinear delay differential equations considered in [3, 7, 10, 24–27, 36]. Hence, our results are generalizations and extensions of the corresponding results in [3, 7, 10, 24–27, 36] and several others in the existing literature.
Availability of data and materials
The data used to support the findings of this study are available from the corresponding author upon request.
References
Abbas, M., Nazir, T.: A new faster iteration process applied to constrained minimization and feasibility problems. Mat. Vesn. 66, 223–234 (2014)
Agarwal, R.P., O’Regan, D., Sahu, D.R.: Iterative construction of fixed points of nearly asymptotically nonexpansive mappings. J. Nonlinear Convex Anal. 8, 61–79 (2007)
Ali, F., Ali, N.J.J.: Some observations on generalized non-expansive mappings with an application. Comput. Appl. Math. 39, 74 (2020)
Aoyama, K., Kohsaka, F.: Fixed point theorem for α-nonexpansive mappings in Banach spaces. Nonlinear Anal. 74, 4387–4391 (2011)
Browder, F.E.: Nonexpansive nonlinear operators in a Banach space. Proc. Natl. Acad. Sci. USA 54, 1041–1044 (1965)
Caglar, H.N., Caglar, S.H., Twizell, E.H.: The numerical solution of third-order boundary-value problems with fourth-degree B-spline functions. Int. J. Comput. Math. 71, 373–381 (1999)
Garodia, C., Uddin, I.: A new fixed point algorithm for finding the solution of a delay differential equation. AIMS Math. 5, 3182–3200 (2020)
Garodia, C., Uddin, I.: A new iterative method for solving split feasibility problem. J. Appl. Anal. Comput. 10, 986–1004 (2020)
Göhde, D.: Zum Prinzip der kontraktiven Abbildung. Math. Nachr. 30, 251–258 (1965)
Gursoy, F., Karakaya, V.: A Picard–S hybrid type iteration method for solving a differential equation with retarded argument (2014). arXiv:1403.2546v2
Ishikawa, S.: Fixed points by a new iteration method. Proc. Am. Math. Soc. 44, 147–150 (1974)
Kafri, H.Q., Khuri, S.A.: Bratu’s problem: a novel approach using fixed-point iterations and Green’s functions. Comput. Phys. Commun. 198, 97–104 (2016)
Kafri, H.Q., Khuri, S.A., Sayfy, A.: A new approach based on embedding Green’s functions into fixed point iterations for highly accurate solution to Troesch’s problem. Int. J. Comput. Methods Eng. Sci. Mech. 17, 93–105 (2016)
Khan, A., Aziz, T.: The numerical solution of third-order boundary-value problems using quintic splines. Appl. Math. Comput. 137, 253–260 (2003)
Khan, S.H.: A Picard-Mann hybrid iterative process. Fixed Point Theory Appl. 2013, 69 (2013)
Khuri, S.A., Louhichi, I.: A novel Ishikawa-Green’s fixed point scheme for the solution of BVPs. Appl. Math. Lett. 82, 50–57 (2018)
Khuri, S.A., Louhichi, I.: A new fixed point iteration method for nonlinear third-order BVPs. Int. J. Comput. Math. 98, 2220–2232 (2021)
Khuri, S.A., Sayfy, A.: Numerical solution of functional differential equations: a Green’s function-based iterative approach. Int. J. Comput. Math. 95, 1937–1949 (2018)
Krasnosel’skii, M.A.: Two observations about the method of successive approximations. Usp. Mat. Nauk 10, 123–127 (1955)
Kucch, K.D., Shikhare, P.U.: Ulam stabilities for nonlinear Volterra delay integro-differential equations. J. Contemp. Math. Anal. 54, 276–287 (2019)
Li, Z., Wang, Y., Tan, F.: The solution of a class of third-order boundary value problems by the reproducing kernel method. Abstr. Appl. Anal. 2012, Article ID 195310 (2012)
Mann, W.R.: Mean value methods in iteration. Proc. Am. Math. Soc. 4, 506–510 (1953)
Noor, M.A.: New approximation schemes for general variational inequalities. J. Math. Anal. Appl. 251, 217–229 (2000)
Ofem, A.E., Udofia, U.E., Igbokwe, D.I.: New iterative algorithm for solving constrained convex minimization problem and split feasibility problem. Eur. J. Math. Anal. 1, 106–132 (2021)
Okeke, G.A.: Convergence analysis of the Picard-Ishikawa hybrid iterative process with applications. Afr. Math. 30, 817–835 (2019)
Okeke, G.A., Abbas, M.A.: A solution of delay differential equations via Picard–Krasnosel’skii hybrid iterative process. Arab. J. Math. 6, 21–29 (2017)
Okeke, G.A., Ofem, A.E.: A novel iterative scheme for solving delay differential equations and nonlinear integral equations in Banach spaces. Math. Methods Appl. Sci. 45, 5111–5134 (2022)
Pant, R., Shukla, R.: Approximating fixed points of generalized α-nonexpansive mappings in Banach spaces. Numer. Funct. Anal. Optim. 38, 248–266 (2017)
Picard, E.: Memoire sur la theorie des equations aux derivees partielles et la methode des approximations successives. J. Math. Pures Appl. 6, 145–210 (1890)
Schu, J.: Weak and strong convergence to fixed points of asymptotically nonexpansive mappings. Bull. Aust. Math. Soc. 43, 153–159 (1991)
Senter, H.F., Dotson, W.G.: Approximating fixed points of nonexpansive mapping. Proc. Am. Math. Soc. 44, 375–380 (1974)
Soltuz, S.M., Grosan, T.: Data dependence for Ishikawa iteration when dealing with contractive-like operators. Fixed Point Theory Appl. 2008, 242916 (2008)
Suzuki, T.: Fixed point theorems and convergence theorems for some generalized nonexpansive mappings. J. Math. Anal. Appl. 340, 1088–1095 (2008)
Thakur, B.S., Thakur, D., Postolache, M.: A new iteration scheme for approximating fixed points of nonexpansive mappings. Filomat 30, 2711–2720 (2016)
Tirmizi, I.A., Twizell, E.H., Siraj-Ul-Islam: A numerical method for third-order non-linear boundary-value problems in engineering. Int. J. Comput. Math. 82, 103–109 (2005)
Udofia, U.E., Ofem, A.E., Igbokwe, D.I.: Weak and strong convergence theorems for fixed points of generalized α-nonexpansive mappings with application. Eur. J. Math. Appl. 1, 1–16 (2021)
Ullah, K., Ayaz, F., Ahmad, J.: Some convergence results of M iterative process in Banach spaces. Asian-Eur. J. Math. 14, 2150017 (2021)
Weng, X.: Fixed point iteration for local strictly pseudocontractive mapping. Proc. Am. Math. Soc. 113, 727–731 (1991)
Acknowledgements
The authors are thankful to the editor and anonymous referees for their valuable comments and suggestions.
Funding
This research received no external funding.
Author information
Authors and Affiliations
Contributions
G.A.O. and A.E.O. analyzed the results in the literature and made original draft preparation. H.I. made the formal analysis, writing-review and editing, and project administration. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Okeke, G.A., Ofem, A.E. & Işık, H. A faster iterative method for solving nonlinear third-order BVPs based on Green’s function. Bound Value Probl 2022, 103 (2022). https://doi.org/10.1186/s13661-022-01686-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-022-01686-y