
Abstract
In this paper we study the coupled Drinfeld-Sokolov-Satsuma-Hirota system, which was developed as one example of nonlinear equations possessing Lax pairs of a special form. Also this system was found as a special case of the four-reduction of the Kadomtsev-Petviashivilli hierarchy. We obtain exact solutions of the system by using Lie symmetry analysis along with the simplest equation and Jacobi elliptic equation methods. Also, symmetry reductions are obtained based on the optimal system of one-dimensional subalgebras. In addition, the conservation laws are derived using two approaches: the new conservation theorem due to Ibragimov and the multiplier method.
Similar content being viewed by others

1 Introduction
In recent years many nonlinear evolution equations (NLEEs) have been used to model many real world problems in various fields of science and engineering. Thus, finding exact explicit solutions of NLEEs is a very important endeavor. It is also true that finding solutions of NLEEs is a difficult task, and only in few special cases one can write down the explicit solutions. However, despite of this fact, various methods of solving NLEEs have been proposed in the literature recently. Some of the most important methods found in the literature include the ansatz method [1], [2], the Weierstrass elliptic function expansion method [3], the Darboux transformation [4], Hirota’s bilinear method [5], the -expansion method [6], the Jacobi elliptic function expansion method [7], [8], the inverse scattering transform method [9], the homogeneous balance method [10], the Bäcklund transformation [11], the F-expansion method [12], the exp-function method [13], the multiple exp-function method [14], the variable separation approach [15], the sine-cosine method [16], the tri-function method [17], [18], and the Lie symmetry method [19]–[25].
In this paper we study the coupled Drinfeld-Sokolov-Satsuma-Hirota (DSSH) system
This system was introduced independently by Drinfeld and Sokolov [26], and by Satsuma and Hirota [27]. The coupled DSSH system [26] was given as one of numerous examples of nonlinear equations possessing Lax pairs of a special form. Also, the coupled DSSH system [27] was found as a special case of the four-reduction of the KP hierarchy, and its explicit one-soliton solution was constructed. Gürses and Karasu [28] found a recursion operator and a bi-Hamiltonian structure for (1). Wazwaz [29] used three distinct methods, namely the Cole-Hopf transformation, Hirota’s bilinear and the exp-function methods, and obtained solitons, multiple soliton solutions, multiple singular soliton solutions, and plane periodic solutions. Zheng [30] used the -expansion method and obtained traveling wave solutions of (1).
In this paper we firstly perform symmetry reductions of (1) using Lie group analysis [19]–[24], which are based on the optimal systems of one-dimensional subalgebras. The simplest equation method [31] and the Jacobi elliptic function method [32] are later employed to obtain some exact solutions of (1). In addition to this, conservation laws are derived for (1) using the new conservation theorem [33] and the multiplier method [34].
It is well known that the conservation laws play a very important role in the solution process of differential equations. Also, one can safely say that the existence of a large number of conservation laws of a system of partial differential equations is a strong indication of its integrability [19]. Recently, conservation laws have been used to find exact solutions of certain partial differential equations [35], [36].
2 Symmetry analysis of (1)
The symmetry group of the coupled DSSH system (1) will be generated by the vector field of the form
The application of the third prolongation to (1) results in an overdetermined system of linear partial differential equations. The general solution of these equations with the aid of Maple is given by
where , , are arbitrary constants. The above general solution contains four arbitrary constants, and hence the infinitesimal symmetries of (1) form the four-dimensional Lie algebra spanned by the following linearly independent operators:
2.1 Optimal system of one-dimensional subalgebras
In this subsection we present the optimal system of one-dimensional subalgebras for equation (1) to obtain the optimal system of group-invariant solutions. The method which we use here for obtaining the optimal system of one-dimensional subalgebras is given in [20]. The adjoint transformations are given by
The commutator table of the Lie point symmetries of equation (1) and the adjoint representations of the symmetry group of (1) on its Lie algebra are given in Table 1 and Table 2, respectively. Table 1 and Table 2 are then used to construct the optimal system of one-dimensional subalgebras for equation (1).
From Tables 1 and 2 and following [20], one can obtain an optimal system of one-dimensional subalgebras given by , where .
2.2 Symmetry reductions of (1)
In this subsection we use the optimal system of one-dimensional subalgebras calculated above to obtain symmetry reductions.
Case 1.
The operator gives rise to the group-invariant solution
where is an invariant of the symmetry . Substitution of (2) into (1) results in the system of ordinary differential equations (ODEs), where F and G satisfy
Case 2. ;
The symmetry gives rise to the group-invariant solution
where is an invariant of the symmetry . The insertion of (3) into (1) results in the system of ODEs
3 Exact solutions of (1) using the simplest equation method
Taking the linear combination of the translation symmetries, viz., and solving the corresponding Lagrange system for the symmetry , one obtains an invariant and the group-invariant solution of the form
where the functions F and G satisfy
Now we use the simplest equation method [25], [31] to solve system (5a)-(5b); and as a result, we obtain the exact solutions of our coupled DSSH system (1). Bernoulli and Riccati equations will be used as the simplest equations.
Let us consider the solutions of (5a)-(5b) in the form
where satisfies the Bernoulli or Riccati equation, M and N are positive integers that can be determined by a balancing procedure and ’s and ’s are parameters to be determined.
3.1 Solutions of (1) using the Bernoulli equation as the simplest equation
The balancing procedure gives and , and hence the solutions of (5a)-(5b) are of the form
Substituting (7a)-(7b) into (5a)-(5b) and making use of the Bernoulli equation [25] and then equating the coefficients of the functions to zero, we obtain an algebraic system of equations in terms of () and (). Solving the resultant system of algebraic equations with the aid of Maple, one possible set of values of and is as follows:
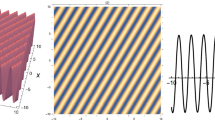
As a result, a solution of (1) is
where . The profile of solution (8a)-(8b) is given in Figure 1.

3.2 Solutions of (1) using the Riccati equation as the simplest equation
In this case the balancing procedure also gives the same values of M and N, i.e., and . Thus the solutions of (5a)-(5b) are of the form
Substituting (9a)-(9b) into (5a)-(5b) and making use of the Riccati equation [25], we obtain an algebraic system of equations in terms of and . Solving the resultant system, one possible set of values is as follows:
Hence solutions of (1) are
and
where .
3.3 Solutions of (1) in terms of Jacobi elliptic functions
We now present exact solutions of the coupled DSSH system (1) that are expressed in Jacobi elliptic functions. The cosine-amplitude function and the sine-amplitude function satisfy the first-order differential equations
and
Treating the above first-order ODEs as our simplest equations and then proceeding as before, we obtain the cnoidal and snoidal wave solutions that are given by
where
and
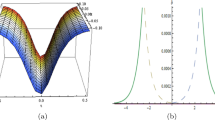
where
and . The profile of solution (14a)-(14b) is given in Figure 2.

4 Conservation laws
In this section we construct conservation laws for the coupled Drinfeld-Sokolov-Satsuma-Hirota system (1). The new conservation theorem due to Ibragimov [33] and the multiplier method [34] will be used. For the notations used in this section, the reader is referred to [33].
4.1 Construction of conservation laws using the new conservation theorem
In this subsection we construct conservation laws for (1) by applying the new conservation theorem [33].
The coupled DSSH system together with its adjoint equation is given by
One can easily verify that the third-order Lagrangian for the system of equations (15) and (16) is given by
We recall that the coupled DSSH system admits the following four Lie point symmetries:
Thus we have the following four cases:
-
(i)
For the Lie point symmetry , the corresponding Lie characteristic functions are and . Thus, by using Ibragimov’s theorem [33], the components of the conserved vector are given by
-
(ii)
The Lie point symmetry has the Lie characteristic functions that are given by and . Hence, by the application of Ibragimov’s theorem [33], the conserved vector is given by
-
(iii)
The symmetry generator has the Lie characteristic functions given by and , and hence in this case one can obtain the conserved vector whose components are
-
(iv)
Finally, we consider the symmetry generator , which has the Lie characteristic functions and . By invoking Ibragimov’s theorem [33], the components of the conserved vector are given by
4.2 Construction of conservation laws using the multiplier method
Here we use the multiplier method [34] to construct conservation laws for the coupled DSSH system (1). The second-order multipliers and are given by
where , , are arbitrary constants. Corresponding to the above multipliers, we obtain the following three local conserved vectors of (1):
and
Remark
It should be noted that higher-order conservation laws of (1) can be computed by increasing the order of the multipliers.
5 Concluding remarks
In this paper firstly we obtained the solutions of the Drinfeld-Sokolov-Satsuma-Hirota equation by employing Lie group analysis together with the simplest and Jacobi elliptic equation methods. Also symmetry reductions were obtained based on the optimal systems of one-dimensional subalgebras. The exact solutions obtained were traveling wave solutions, cnoidal and snoidal wave solutions. Furthermore, the conservation laws for the underlying equation were derived by using two different approaches, namely the new conservation theorem and the multiplier method. The importance of the conservation laws was explained in the introduction.
References
Hu JL: Explicit solutions to three nonlinear physical models. Phys. Lett. A 2001, 287: 81-89. 10.1016/S0375-9601(01)00461-3
Hu JL: A new method for finding exact traveling wave solutions to nonlinear partial differential equations. Phys. Lett. A 2001, 286: 175-179. 10.1016/S0375-9601(01)00291-2
Chen Y, Yan Z: The Weierstrass elliptic function expansion method and its applications in nonlinear wave equations. Chaos Solitons Fractals 2006, 29: 948-964. 10.1016/j.chaos.2005.08.071
Matveev VB, Salle MA: Darboux Transformation and Soliton. Springer, Berlin; 1991.
Hirota R: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge; 2004.
Wang M, Li X, Zhang J:The -expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. A 2008, 372: 417-423. 10.1016/j.physleta.2007.07.051
Lu DC: Jacobi elliptic functions solutions for two variant Boussinesq equations. Chaos Solitons Fractals 2005, 24: 1373-1385. 10.1016/j.chaos.2004.09.085
Yan ZY:Abundant families of Jacobi elliptic functions of the dimensional integrable Davey-Stewartson-type equation via a new method. Chaos Solitons Fractals 2003, 18: 299-309. 10.1016/S0960-0779(02)00653-7
Ablowitz MJ, Clarkson PA: Nonlinear Evolution Equations and Inverse Scattering. Cambridge University Press, Cambridge; 1991.
Wang M, Zhou Y, Li Z: Application of a homogeneous balance method to exact solutions of nonlinear equations in mathematical physics. Phys. Lett. A 1996, 216: 67-75. 10.1016/0375-9601(96)00283-6
Gu CH: Soliton Theory and Its Application. Zhejiang Science and Technology Press, Zhejiang; 1990.
Wang M, Li X: Extended F -expansion and periodic wave solutions for the generalized Zakharov equations. Phys. Lett. A 2005, 343: 48-54. 10.1016/j.physleta.2005.05.085
Zhang S: Application of Exp-function method to high-dimensional nonlinear evolution equation. Chaos Solitons Fractals 2008, 38: 270-276. 10.1016/j.chaos.2006.11.014
Ma WX, Huang T, Zhang Y: A multiple exp-function method for nonlinear differential equations and its applications. Phys. Scr. 2010., 82: 10.1088/0031-8949/82/06/065003
Lou SY, Lu JZ: Special solutions from variable separation approach: Davey-Stewartson equation. J. Phys. A, Math. Gen. 1996, 29: 4209-4215. 10.1088/0305-4470/29/14/038
Wazwaz AM: The tanh and sine-cosine method for compact and noncompact solutions of nonlinear Klein Gordon equation. Appl. Math. Comput. 2005, 167: 1179-1195. 10.1016/j.amc.2004.08.006
Yan ZY: The new tri-function method to multiple exact solutions of nonlinear wave equations. Phys. Scr. 2008., 78: 10.1088/0031-8949/78/03/035001
Yan ZY: Periodic, solitary and rational wave solutions of the 3D extended quantum Zakharov-Kuznetsov equation in dense quantum plasmas. Phys. Lett. A 2009, 373: 2432-2437. 10.1016/j.physleta.2009.04.018
Bluman GW, Kumei S: Symmetries and Differential Equations. Springer, New York; 1989.
Olver PJ: Applications of Lie Groups to Differential Equations. 2nd edition. Springer, Berlin; 1993.
Ovsiannikov LV: Group Analysis of Differential Equations. Academic Press, New York; 1982.
Ibragimov NH: CRC Handbook of Lie Group Analysis of Differential Equations. CRC Press, Boca Raton; 1993.
Ibragimov NH: CRC Handbook of Lie Group Analysis of Differential Equations. CRC Press, Boca Raton; 1994.
Ibragimov NH: CRC Handbook of Lie Group Analysis of Differential Equations. CRC Press, Boca Raton; 1995.
Adem KR, Khalique CM:Exact solutions and conservation laws of a -dimensional nonlinear KP-BBM equation. Abstr. Appl. Anal. 2013., 2013: 10.1155/2013/791863
Drinfeld VG, Sokolov VV: Equations of Korteweg-de Vries type and simple Lie algebras. Dokl. Akad. Nauk SSSR 1981, 258: 11-16.
Satsuma J, Hirota R: A coupled KdV equation is one of the four-reduction of the KP hierarchy. J. Phys. Soc. Jpn. 1982, 51: 3390-3397. 10.1143/JPSJ.51.3390
Gürses M, Karasu A: Integrable KdV systems: recursion operators of degree four. Phys. Lett. A 1999, 251: 247-249. 10.1016/S0375-9601(98)00910-4
Wazwaz AM: The Cole-Hopf transformation and multiple soliton solutions for the integrable sixth-order Drinfeld-Sokolov-Satsuma-Hirota equation. Appl. Math. Comput. 2009, 207: 248-255. 10.1016/j.amc.2008.10.034
Zheng B:Travelling wave solutions of two nonlinear evolution equations by using the -expansion method. Appl. Math. Comput. 2011, 217: 5743-5753. 10.1016/j.amc.2010.12.052
Kudryashov NA: Simplest equation method to look for exact solutions of nonlinear differential equations. Chaos Solitons Fractals 2005, 24: 1217-1231. 10.1016/j.chaos.2004.09.109
Gradshteyn IS, Ryzhik IM: Table of Integrals, Series, and Products. 7th edition. Academic Press, New York; 2007.
Ibragimov NH: A new conservation theorem. J. Math. Anal. Appl. 2007, 333: 311-328. 10.1016/j.jmaa.2006.10.078
Anco SC, Bluman GW: Direct construction method for conservation laws of partial differential equations. Part I: examples of conservation law classifications. Eur. J. Appl. Math. 2002, 13: 545-566.
Sjoberg A: On double reductions from symmetries and conservation laws. Nonlinear Anal., Real World Appl. 2009, 10: 3471-3477. 10.1016/j.nonrwa.2008.09.029
Muatjetjeja B, Khalique CM: Lie group classification for a generalised coupled Lane-Emden system in dimension one. East Asian J. Appl. Math. 2014, 4(4):301-311.
Adem AR, Khalique CM: On the solutions and conservation laws of a coupled KdV system. Appl. Math. Comput. 2012, 219: 959-969. 10.1016/j.amc.2012.06.076
Acknowledgements
KRA is grateful to the National Research Foundation of South Africa for the generous financial support.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
KRA and CMK worked together in the derivation of the mathematical results. Both authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

{kind=link}
{kind=link}
Cite this article
Adem, K.R., Khalique, C.M. On the solutions and conservation laws of the coupled Drinfeld-Sokolov-Satsuma-Hirota system. Bound Value Probl 2014, 248 (2014). https://doi.org/10.1186/s13661-014-0248-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-014-0248-6