
Abstract
In this paper, we first study G-κ-strictly pseudocontractive mappings and we establish a strong convergence theorem for finding the fixed points of two G-κ-strictly pseudocontractive mappings, two G-nonexpansive mappings, and two G-variational inequality problems in a Hilbert space endowed with a directed graph without the Property G. Moreover, we prove an interesting result involving the set of fixed points of a G-κ-strictly pseudocontractive and G-variational inequality problem and if Λ is a G-κ-strictly pseudocontractive mapping, then \(I-\Lambda \) is a \(G-\frac{(1-\kappa )}{2}\)-inverse strongly monotone mapping, shown in Lemma 3.3. In support of our main result, some examples are also presented.
Similar content being viewed by others

1 Introduction
Let H be a real Hilbert space. Let ζ be a nonempty, closed, and convex subset of H with inner product \(\langle \cdot ,\cdot \rangle \) and norm \(\|\cdot \|\), respectively, and let \(\mathfrak{T}\) be a self-mapping of ζ. We use \(F (\mathfrak{T})\) to denote the set of fixed points of \(\mathfrak{T}\) (i.e., \(F (\mathfrak{T} ) = \{x \in \zeta : \mathfrak{T}x = x\}\)). The iterative schemes to approximate the fixed points of nonlinear mappings have a long history and have been studied intensively by many researchers [10, 11, 17, 23]. A mapping \(\mathfrak{T}\) is called κ-strictly pseudocontractive if there exists a constant \(\kappa \in [0,1)\) such that
If \(\kappa =1\), a mapping \(\mathfrak{T}\) is called a pseudocontractive mapping.
Note that the class of κ-strictly pseudocontractive strictly includes the class of nonexpansive mappings that are self-mappings \(\mathfrak{T}\) on ζ such that
Strictly pseudocontractive was first introduced by Browder and Petryshyn [8] in 1967. It is well known that strictly pseudocontractive is more general than nonexpansive mappings and they have a wider range of applications. Therefore, it is important to develop the theory of iterative methods for strictly pseudocontractive. Many authors have proposed iterative algorithms and proved the strong convergence theorems for a nonexpansive mapping and a κ-strictly pseudocontractive mapping in Hilbert space to find their fixed points, see, for example, [1, 4, 10, 13, 15, 18, 29].
To prove the strong convergence of iterations determined by nonexpansive mapping, Moudafi [19] established a theorem for finding the fixed points of nonexpansive mappings. More precisely, he established the following result, known as the viscosity approximation method. To construct an iterative algorithm such that it converges strongly to the fixed points of a finite family of strictly pseudocontractive by using the concept of the viscosity approximation method, Yao et al. [31] proposed the intermixed algorithm for two strictly pseudocontractive mappings as follows:
Algorithm 1
For arbitrarily given \(x_{0}\in \zeta \), \(y_{0}\in \zeta \), let the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) be generated iteratively by
where \(\{\alpha _{n}\}\) and \(\{\beta _{n}\}\) are two sequences of real numbers in (0,1), \(T,S:\zeta \rightarrow \zeta \) are strictly λ-pseudocontractive mappings, \(f:\zeta \rightarrow \mathcal{H}\) is a \(\rho _{1}\)-contraction, \(g:\zeta \rightarrow \mathcal{H}\) is a \(\rho _{2}\)-contraction, and \(k\in (0,1-\lambda )\) is a constant.
We now move onto some basics and definitions in graph theory. Let \(G=(V(G),E(G))\) be a directed graph, where \(V(G)\) is a set of vertices of a graph and E(G) is a set of its edges. We denote by \(G^{-1}\) the directed graph obtained from G by reversing the direction of the edges. That is,
The following basic definitions of domination in graphs are needed to prove the main theorem. Let \(G=(V(G),E(G))\) be a directed graph. A set \(X\subseteq V(G)\) is called a dominating set if every \(z\in V(G)\setminus X\) there exists \(x\in X\) such that \((x,z)\in E(G)\) and we say that x dominates z or z is dominated by x. Let \(z\in V\), a set \(X\subseteq V\) is dominated by z if \((z,x)\in E(G)\) for any \(x\in X\) and we say that X dominates z if \((x,z)\in E(G)\) for all \(x\in X\). In this paper, we always assume that \(E(G)\) contains all loops.
In 2008, by combining the notions in fixed-point theory and graph theory, Jachymski [12] generalized the Banach contraction principle in a complete metric space endowed with a directed graph. He also introduced a contractive-type mapping with a directed graph as follows:
Definition 1.1
Let \((X,d)\) be a metric space and \(G=(V(G),E(G))\) be a directed graph, where \(V(G)=X\) and \(E(G)\) contains all loops, that is \(\Delta \subseteq E(G)\). We say that a mapping \(\mathbf{f}:X\rightarrow X\) is a Banach G-contraction if f preserves the edges of G, i.e.,
and there exists \(k\in (0,1)\) such that
Definition 1.2
Let ζ be a nonempty convex subset of a Banach space, \(G=(V(G),E(G))\) be a directed graph such that \(V(G)=\zeta \) and \(\mathcal{T}:\zeta \rightarrow \zeta \), then \(\mathcal{T}\) is said to be a G-nonexpansive mapping if the following conditions hold:
-
(i)
\(\mathcal{T}\) is edge preserving, i.e., for any \(x,y\in \zeta \) such that \((x,y)\in E(G)\Rightarrow (\mathcal{T} x,\mathcal{T} y)\in E(G)\);
-
(ii)
\(\|\mathcal{T} x-\mathcal{T}y\|\leq \|x-y\|\), where \((x,y)\in E(G)\) for any \(x,y\in \zeta \).
This mapping was introduced by Tiammee et al. [25].
The variational inequality problem (VIP) is to find a point \(u\in C\) such that
for all \(v\in C\). The set of all solutions of the variational inequality is denoted by \(VI(C,A)\). Historically, the variational inequality was introduced by Stampachhia [22]. Since then, variational inequalities have been used in various topics such as physic, optimization, and applied sciences, see, for example, [3, 20, 30].
Recently, in 2019, Kangtunyakarn [14] introduced G-variational inequality problems and G-α-inverse strongly monotone mappings as follows:
Definition 1.3
Let ζ be a nonempty, convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\). The G-variational inequality problem is to find a point \(x^{*}\in \zeta \) such that
for all \(y\in \zeta \) with \((x^{*},y)\in E(G)\) and \(A:\zeta \rightarrow H\) is a mapping. The set of all solutions of (4) is denoted by \(G-VI(\zeta ,A)\).
Definition 1.4
Let ζ be a nonempty, convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\). The mapping \(A:\zeta \rightarrow H\) is said to be G-α-inverse strongly monotone if there exists \(\alpha >0\) such that
for all \(x,y\in \zeta \) with \((x,y)\in E(G)\).
Let ζ be a nonempty, convex subset of a Banach space X and let \(G=(V(G),E(G))\) be a directed graph such that \(V(G)=\zeta \). Then, ζ is said to have Property G [25] if every sequence \(\{a_{n}\}\) in ζ converges weakly to \(x\in \zeta \), there exists a subsequence \(\{a_{n_{k}}\}\) of \(\{a_{n}\}\) such that \((a_{n_{k}},x)\in E(G)\) for all \(k\in \mathbbm{ }\mathbb{N}\). During the course of this research, when investigating the literature on research methods, it was found that many researchers were using the Property G to prove the strong convergence theorems, see for example [14, 16, 26, 28].
In this paper, we will use some suitable conditions instead of the Property G.
Question 1
Can we prove a strong convergence theorem for finding the fixed points of two \(G-\kappa \)-strictly pseudocontractive mappings, two G-nonexpansive mappings, and two G-variational inequality problems in a Hilbert space endowed with a directed graph without the Property G?
By using the concept of (3), we introduce a new iterative method as follows:
Algorithm 2
Starting with \(x_{1},y_{1}\in \zeta \), let the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) be defined by
By putting \(\mathcal{S}_{1}=\mathcal{S}_{2} = 0 \), we obtain
which is a modified version of [31].
To answer Question 1, we prove a strong convergence theorem for solving fixed-point problems in a Hilbert space endowed with a directed graph by using Algorithm 2, where \(\mathcal{S}_{1},\mathcal{S}_{2}:\zeta \rightarrow H\) are the \(G-\alpha \)-inverse strongly monotone mappings, \(f,g:H\rightarrow H\) are G-contraction mappings, and \(\mathcal{B}_{1},\mathcal{B}_{2}:\zeta \rightarrow \zeta \) are G-nonexpansive mappings with some extra conditions in Theorem 3.2.
Inspired by the concept above, we introduce the definition of a \(G-\kappa \)-strictly pseudocontractive mapping that is different from κ-strictly pseudocontractive, see Example 2.5, and prove a strong convergence theorem for finding the fixed points of two G-κ-strictly pseudocontractive mappings, two G-nonexpansive mappings, and two G-variational inequality problems in a Hilbert space endowed with a directed graph without the Property G. Moreover, we prove an interesting Lemma involving the set of fixed points of a G-κ-strictly pseudocontractive and G-variational inequality problem and if Λ is a G-κ-strictly pseudocontractive mappings, then \(I-\Lambda \) is a \(G-\frac{(1-\kappa )}{2}\)-inverse strongly monotone mapping, shown in Lemma 3.3. Finally, we give some examples for the main theorem.
2 Preliminaries
In this paper, we denote the weak convergence and the strong convergence by \(^{\backprime \backprime}\rightharpoonup ^{\prime \prime}\) and \(^{\backprime \backprime}\rightarrow ^{\prime \prime}\), respectively. For every \(x\in H\), there exists a unique nearest point \(P_{\zeta }x\) in ζ such that \(\|x-P_{\zeta }x\|\leq \|x-y\|\) for all \(y\in \zeta \). \(P_{\zeta}\) is called the metric projection of H onto ζ. Furthermore, \(P_{\zeta}\) is a firmly nonexpansive mapping of H onto ζ, i.e.,
In a real Hilbert space H, it is well known that H satisfies Opial’s condition [21], i.e., for any sequence \(\{x_{n}\}\subset H\) with \(x_{n}\rightharpoonup x\), the inequality
holds for every \(y\in H\) with \(y\neq x\).
The following Definitions and Lemmas are needed to prove the main theorem.
Lemma 2.1
([27])
Let \(\{s_{n}\}\) be a sequence of nonnegative real numbers satisfying
where \(\alpha _{n}\) is a sequence in \((0,1)\) and \(\{\delta _{n}\}\) is a sequence such that
-
(i)
\(\sum_{i=1}^{\infty} \alpha _{n} = \infty \);
-
(ii)
\(\limsup_{n \to \infty}\frac{\delta _{n}}{\alpha _{n}} \leq 0 \) or \(\sum_{n=1}^{\infty}\lvert \delta _{n} \rvert < \infty \).
Then, \(\lim_{n \to \infty}s_{n}=0\).
Lemma 2.2
([24])
For a given \(z\in H\) and \(u\in \zeta \),
Definition 2.3
([25])
Let \(G=(V(G),E(G))\) be a directed graph. A graph G is called transitive if for any \(x,y,z\in V(G)\) with \((x,y)\) and \((y,z)\) are in \(E(G)\), then \((x,z)\in E(G)\).
Next, we introduce the definition of a \(G-\kappa \)-strictly pseudocontractive mapping.
Definition 2.4
Let ζ be a nonempty, closed, and convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\) and \(\Lambda :\zeta \rightarrow \zeta \). Then, Λ is said to be \(G-\kappa\)-strictly pseudocontractive if there exists a constant \(\kappa \in [0,1)\) and the following conditions hold;
-
(i)
Λ is edge preserving, i.e., for any \(x,y\in \zeta \) such that \((x,y)\in E(G)\Rightarrow (\Lambda x,\Lambda y)\in E(G)\);
-
(ii)
\(\|\Lambda x-\Lambda y\|^{2}\leq \|x-y\|^{2}+\kappa \|(I-\Lambda )x-(I- \Lambda )y\|^{2}\), where \((x,y)\in E(G)\) for any \(x,y\in \zeta \).
Example 2.5
Let \(\mathbb{R}\) be the set of real numbers, \(\zeta =[-10,10]\) with \(G=(\zeta , E(G))\) and \(E(G)=\{(x,y)\in \mathbb{R}\times \mathbb{R}: x,y\in [0,10]\}\). Define the mapping \(\Lambda :\zeta \rightarrow \zeta \) by
for all \(x\in \zeta \) with
Then, Λ is a G-\((\frac{1}{2})\)-strictly pseudocontractive mapping, but Λ is not a \(\frac{1}{2}\)-strictly pseudocontractive mapping.
Solution. Let \(x,y\in \zeta \) and \((x,y)\in E(G)\). Then, we have \(x,y\in [0,10]\).
It follows that \(\Lambda x,\Lambda y\in [0,10]\). Thus,
From the definition of Λ, we have
and
for all \(x,y\in \zeta \) with \((x,y)\in E(G)\).
From the definition of Λ and (7), we have
Hence, we obtain that Λ is a G-\((\frac{1}{2})\)-strictly pseudocontractive mapping.
Next, we will show that Λ is not a \(\frac{1}{2}\)-strictly pseudocontractive mapping. Choose \(x=-9\) and \(y=-10\). Then,
Hence, Λ is not a \(\frac{1}{2}\)-strictly pseudocontractive mapping.
Example 2.6
Let \(H=\mathbb{R}\), \(\zeta =[-10,10]\) with \(G=(\zeta , E(G))\) and \(E(G)=\{(x,y)|x\cdot y>0\}\). Define the mapping \(\bar{\Lambda}:\zeta \rightarrow \zeta \) by \(\bar{\Lambda}_{1}:[-10,10]\rightarrow [-10,10]\) defined by
for all \(x\in [-10,10]\) with
Then, Λ is a G-\((\frac{1}{2})\)-strictly pseudocontractive mapping, but Λ is not a \(\frac{1}{2}\)-strictly pseudocontractive mapping.
Solution. Let \(x,y\in \zeta \) and \((x,y)\in E(G)\). Then, we have \(x,y>0\).
Case I; \(x,y>0\), we have \(\bar{\Lambda}x=\bar{\Lambda}y=1\). Then, \(\bar{\Lambda}x\cdot \bar{\Lambda}y>0\).
Case II; \(x,y<0\), we have \(\bar{\Lambda}x=\bar{\Lambda}y=-1\). Then, \(\bar{\Lambda}x\cdot \bar{\Lambda}y>0\).
Thus, \((\bar{\Lambda}x,\bar{\Lambda}y)\in E(G)\).
From case I; \(x,y>0\), then
From case II; \(x,y<0\), by using the same technique as in Case I, we obtain that
Thus, Λ̄ is a G-\((\frac{1}{2})\)-strictly pseudocontractive mapping.
Next, we will show that Λ̄ is not a \(\frac{1}{2}\)-strictly pseudocontractive mapping. Choose \(x=1\) and \(y=\frac{-1}{5}\). Then,
Hence, Λ̄ is not a \(\frac{1}{2}\)-strictly pseudocontractive mapping.
Lemma 2.7
([14])
Let ζ be a nonempty, closed, and convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\). Let \(E(G)\) be convex and G be transitive with \(E(G)=E(G)^{-1}\) and let \(A:\zeta \rightarrow H\) be a \(G-\alpha \)-inverse strongly monotone operator with \(A^{-1}(0)\neq 0\). Then, \(G-VI(\zeta ,A)=A^{-1}(0)=F(P_{\zeta}(I-\lambda A))\), for all \(\lambda >0\).
Lemma 2.8
([14])
Let H be a Hilbert space and ζ be a nonempty, closed, and convex subset of H with ζ having a property G. Let \(G=(V(G),E(G))\) be a directed graph where \(V(G)=\zeta \) and \(E(G)\) is a convex set. Let \(A:\zeta \rightarrow H\) be a \(G-\alpha \)-inverse strongly monotone mapping with \(F(P_{\zeta}(I-\lambda A))\times F(P_{\zeta}(I-\lambda A))\subseteq E(G)\), for all \(\lambda \in (0,2\alpha )\). Then, \(F(P_{\zeta}(I-\lambda A))\) is closed and convex.
Lemma 2.9
([25])
Let \(\mathcal{X}\) be a normed space and ζ be a subset of \(\mathcal{X}\) having a property G. Let \(G=(V(G),E(G))\) be a directed graph such that \(V(G)=\zeta \) and \(E(G)\) is convex. Suppose \(\mathcal{T}:\zeta \rightarrow \zeta \) is a G-nonexpansive mapping and \(F(\mathcal{T})\times F(\mathcal{T})\subseteq E(G)\). Then, \(F(\mathcal{T})\) is closed and convex.
Lemma 2.10
Let ζ be a nonempty, closed, and convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\). Let \(E(G)\) be convex and G be transitive with \(E(G)=E(G)^{-1}\). Let \(\mathcal{T}:\zeta \rightarrow \zeta \) be a G- nonexpansive mapping and \(\Lambda :\zeta \rightarrow \zeta \) be a \(G-\kappa \)-strictly pseudocontractive mapping. Define a mapping \(\mathcal{B}:\zeta \rightarrow \zeta \) by \(\mathcal{B}x=\mathcal{T}((1-b)I+b\Lambda )x\) for all \(x\in \zeta \) and \(b\in (0,1-k)\). Then, \(\mathcal{B}\) is a G-nonexpansive mapping, for all \(x,y\in \zeta \) with \((x,y)\in E(G)\).
Proof
Let \(x,y\in \zeta \) and \((x,y)\in E(G)\).
Since Λ is edge preserving and \((x,y)\in E(G)\), then \((\Lambda x,\Lambda y)\in E(G)\).
As \((x,y),(\Lambda x,\Lambda y) \in E(G)\) and \(E(G)\) is convex, we obtain
Since \(\mathcal{T}\) is edge preserving and \(((1-b)x+b\Lambda x, (1-b)y+b\Lambda y)\in E(G)\), then
Thus, \(\mathcal{B}\) is edge preserving.
We have
for all \(x,y\in \zeta \) with \((x,y)\in E(G)\).
This implies that \(\|\mathcal{B} x-\mathcal{B} y\|\leq \|x-y\|\).
Hence, \(\mathcal{B} \) is a G-nonexpansive mapping. □
Lemma 2.11
Let ζ be a nonempty, closed, and convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\). Let \(E(G)\) be convex and G be transitive with \(E(G)=E(G)^{-1}\). Let \(\mathcal{T}:\zeta \rightarrow \zeta \) be a G- nonexpansive mapping and \(\Lambda :\zeta \rightarrow \zeta \) be a \(G-\kappa \)-strictly pseudocontractivea mapping. Define a mapping \(\mathcal{B}:\zeta \rightarrow \zeta \) by \(\mathcal{B}x=\mathcal{T}((1-b)I+b\Lambda )x\) for all \(x\in \zeta \), \(b\in (0,1-k)\) and \(F(\mathcal{B})\times (F(\mathcal{T})\cap F(\Lambda ))\subseteq E(G)\). Then,
Proof
It is obvious that \(F(\mathcal{T})\cap F(\Lambda )\subseteq F(\mathcal{B})\). Next, we claim that \(F(\mathcal{B})\subseteq F(\mathcal{T})\cap F(\Lambda )\). To show this, let \(x_{0}\in F(\mathcal{B})\), \(x^{*}\in F(\mathcal{T})\cap F(\Lambda )\), Then, we have \((x_{0},x^{*})\in E(G)\). Since Λ is edge preserving and \((x_{0},x^{*})\in E(G)\), then \((\Lambda x_{0}, x^{*})\in E(G)\). Since \(E(G)=E(G)^{-1}\) and \((\Lambda x_{0}, x^{*})\in E(G)\), then we have \((x^{*},\Lambda x_{0})\in E(G)\). By the transitivity of G and \((x_{0},x^{*})\in E(G)\) and \((x^{*},\Lambda x_{0})\in E(G)\), then we have \((x_{0},\Lambda x_{0})\in E(G)\). As \((x_{0},x^{*})\) and \((\Lambda x_{0},x^{*})\) are in \(E(G)\) and \(E(G)\) is convex, we obtain
Then, we have
for all \(x_{0},x^{*}\in \zeta \) with \((x_{0},x^{*})\in E(G)\).
From (8), this implies that
for all \(x_{0},x^{*}\in \zeta \) with \((x_{0},x^{*})\in E(G)\).
Then, we have \(\Lambda x_{0}=x_{0}\).
That is, \(x_{0}\in F(\Lambda )\).
Since \(x_{0}\in F(\mathcal{B})\) from the definition of \(\mathcal{B}\), we have
Then, we have \(x_{0}\in F(\mathcal{T})\), therefore \(x_{0}\in F(\mathcal{T})\cap F(\Lambda )\).
It follows that \(F(\mathcal{B})\subseteq F(\mathcal{T})\cap F(\Lambda )\).
Hence, \(F(\mathcal{B})=F(\mathcal{T})\cap F(\Lambda )\). □
3 Main results
In this section, we prove a strong convergence theorem for solving the fixed-point problem of two G-nonexpansive mappings, two \(G-\kappa _{i}\)-strictly pseudocontractive mappings, and two G-variational inequality problems in Hilbert space endowed with a directed graph.
The following Proposition is needed to prove the main theorem.
Proposition 3.1
Let ζ be a nonempty, closed, and convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\). Let \(E(G)\) be convex and G be transitive with \(E(G)=E(G)^{-1}\). For every \(i=1,2\), let \(\mathcal{S}_{i}:\zeta \rightarrow H\) be a \(G-\alpha _{i}\)-inverse strongly monotone mapping with
where \((x_{0},x_{0})\) and \((y_{0},y_{0})\) are in \(E(G)\). If \(\zeta =V(G)\) dominates \(x_{0}\) and \(y_{0}\), then \((x_{n},x_{n+1})\), \((y_{n},y_{n+1})\) are in \(E(G)\) for all \(n\in \mathbb{N}\).
Proof
Since \(\zeta =V(G)\) dominates \(x_{0}\) and \(P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{0}\in \zeta \), then we have \((P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{0},x_{0})\in E(G)\). From \(E(G)=E(G)^{-1}\) and \((P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{0},x_{0})\in E(G)\), we have \((x_{0},P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{0})\in E(G)\). Since \(\zeta =V(G)\) dominates \(x_{0}\) and \(U_{0}=P_{\zeta}(\alpha _{0} f(y_{0})+(1-\alpha _{0})\mathcal{B}_{1} x_{0}) \in \zeta \), then we have \((U_{0},x_{0})\in E(G)\). From \(E(G)=E(G)^{-1}\) and \((U_{0},x_{0})\in E(G)\), we have \((x_{0},U_{0})\in E(G)\). Since \((x_{0},x_{0})\), \((x_{0},P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{0})\) and \((x_{0},U_{0})\) are in \(E(G)\) and \(E(G)\) is convex, we obtain
Since \(\zeta =V(G)\) dominates \(x_{0}\) and \(P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{1}\in \zeta \), then we have \((P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{1},x_{0})\in E(G)\). From \(E(G)=E(G)^{-1}\) and \((P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{1},x_{0})\in E(G)\), we have \((x_{0},P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{1})\in E(G)\). Since \(\zeta =V(G)\) dominates \(x_{0}\) and \(U_{1}=P_{\zeta}(\alpha _{1} f(y_{1})+(1-\alpha _{1})\mathcal{B}_{1} x_{1}) \in \zeta \), then we have \((U_{1},x_{0})\in E(G)\). From \(E(G)=E(G)^{-1}\) and \((U_{1},x_{0})\in E(G)\), we have \((x_{0} ,U_{1})\in E(G)\). Since \((x_{0},x_{1})\), \((x_{0},P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{1})\) and \((x_{0},U_{1})\) are in \(E(G)\) and \(E(G)\) is convex, we obtain
Since \(\zeta =V(G)\) dominates \(x_{0}\) and \(P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{k}\in \zeta \), then we have \((P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{k},x_{0})\in E(G)\), for \(k\in \mathbb{N}\). From \(E(G)=E(G)^{-1}\) and \((P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{k},x_{0})\in E(G)\), we have \((x_{0}, P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{k})\in E(G)\), for \(k\in \mathbb{N}\). Since \(\zeta =V(G)\) dominates \(x_{0}\) and \(U_{k}=P_{\zeta}(\alpha _{k} f(y_{k})+(1-\alpha _{k})\mathcal{B}_{k} x_{k}) \in \zeta \), then we have \((U_{k},x_{0})\in E(G)\), for \(k\in \mathbb{N}\). From \(E(G)=E(G)^{-1}\) and \((U_{k},x_{0})\in E(G)\), we have \((x_{0},U_{k})\in E(G)\), for \(k\in \mathbb{N}\).
Next, Assume that \((x_{0},x_{k})\in E(G)\), for \(k\in \mathbb{N}\). Since \((x_{0},x_{k})\), \((x_{0}, P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{k})\), and \((x_{0},U_{k})\) are in \(E(G)\) and \(E(G)\) is convex, then we obtain \((\delta _{0}x_{0}+\eta _{0}x_{0}+\mu _{0}x_{0}, \delta _{0}x_{k}+ \eta _{0}P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})x_{k}+\mu _{0}U_{k})=(x_{0},x_{k+1}) \in E(G)\).
Hence, by induction, we have \((x_{0},x_{n})\in E(G)\). From \(E(G)=E(G)^{-1}\) and \((x_{0},x_{n})\in E(G)\), we have \((x_{n},x_{0})\in E(G)\), for all \(n\in \mathbb{N}\). By the transitivity of G and \((x_{n},x_{0}),(x_{0},x_{n+1})\in E(G)\), we have
Applying the same arguments as for deriving (10), we also obtain
□
Theorem 3.2
Let ζ be a nonempty, closed, and convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\). Let \(E(G)\) be convex and G be transitive with \(E(G)=E(G)^{-1}\). For every \(i=1,2\), let \(\mathcal{S}_{i}:\zeta \rightarrow H\) be a \(G-\alpha _{i}\)-inverse strongly monotone mapping with \(\alpha =\min \{\alpha _{1},\alpha _{2}\}\) and let \(g,f:H\rightarrow H\) be an \(a_{g}\) and \(a_{f}-G\)-contraction mapping with \(a=\max \{a_{g},a_{f}\}\). For every \(i=1,2\), let \(\mathcal{T}_{i}:\zeta \rightarrow \zeta \) be a G-nonexpansive mapping and \(\Lambda _{i}:\zeta \rightarrow \zeta \) be a \(G-\kappa _{i}\)-strictly pseudocontractive mapping with \(k=\max \{\kappa _{1},\kappa _{2}\}\). Define a mapping \(\mathcal{B}:\zeta \rightarrow \zeta \) by \(\mathcal{B}_{i}x=\mathcal{T}_{i}((1-b)I+b\Lambda _{i})x\) for all \(x\in \zeta \) and \(i=1,2\), \(b\in (0,1-k)\). Assume that \(\mathfrak{F}_{i}=F(\mathcal{B}_{i})\cap G-VI(\zeta ,\mathcal{S}_{i}) \neq \emptyset \) for all \(i=1,2\) with \(F(\mathcal{B}_{i})\times F(\mathcal{B}_{i})\subseteq E(G)\), \(G-VI(\zeta ,\mathcal{S}_{i})\times G-VI(\zeta ,\mathcal{S}_{i}) \subseteq E(G)\) and \(F(\mathcal{B})\times (F(\mathcal{T})\cap F(\Lambda ))\subseteq E(G)\) for all \(i=1,2\) and there exists \(x_{0},y_{0}\in \zeta \) such that \((x_{0},x_{0})\) and \((y_{0},y_{0})\) are in \(E(G)\) and \(\zeta =V(G)\) dominates \(x_{0}\) and \(y_{0}\). Let the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) be generated by \(x_{0},y_{0}\in \zeta \) and
where \(\{\delta _{n} \}, \{\eta _{n} \}, \{ \mu _{n} \}, \{\alpha _{n} \} \subseteq [0,1]\) with \(\delta _{n}+\eta _{n}+\mu _{n}=1\) and \(\lambda \in (0,2\alpha )\) with \(\lambda =\min\{\lambda _{1},\lambda _{2}\}\). Assume the following conditions hold;
-
(i)
\(0 <\xi \leq \delta _{n},\eta _{n}\), \(\mu _{n}\leq \bar{\xi}\) for all \(n\in N\) and for some \(\xi ,\bar{\xi}>0\);
-
(ii)
\(\lim_{n \rightarrow \infty} \alpha _{n}=0\) and \(\sum_{n=1}^{\infty} \alpha _{n} = \infty \);
-
(iii)
\(\sum_{n=1}^{\infty} \lvert \delta _{n+1}-\delta _{n} \rvert < \infty \), \(\sum_{n=1}^{\infty} \lvert \eta _{n+1}-\eta _{n} \rvert < \infty \), \(\sum_{n=1}^{\infty} \lvert \alpha _{n+1}-\alpha _{n} \rvert < \infty \).
If \(\{x_{n}\}\) dominates \(P_{\mathfrak{F}_{1}} f(y_{0})\) and \(\{y_{n}\}\) dominates \(P_{\mathfrak{F}_{2}} g(x_{0})\), then \(\{x_{n}\}\) converges strongly to \(x^{*}=P_{\mathfrak{F}_{1}} f(y_{0})\) and \(\{y_{n}\}\) converges strongly to \(y^{*}=P_{\mathfrak{F}_{2}} g(x_{0})\), where \(P_{\mathfrak{F}_{i}}\) is a metric projection on \(\mathfrak{F}_{i}\), for all \(i=1,2\).
Proof
The proof of this theorem will be divided into five steps.
Step 1: We will show that \(\{x_{n}\}\) is bounded.
First, we will prove that
for all \(x,y\in \zeta \) and \((x,y)\in E(G)\).
Letting \(x,y\in \zeta \) and \((x,y)\in E(G)\), we have
for all \(x,y\in \zeta \) with \((x,y)\in E(G)\).
From Lemmas 2.7 and 2.8, we have \(G-VI(\zeta ,\mathcal{S}_{i})\) is closed and convex, for all \(i=1,2\).
From Lemma 2.9, we have \(F(\mathcal{B}_{i})\) is closed and convex. Then, \(\mathfrak{F}_{i}\) is closed and convex, for all \(i=1,2\).
Let \(x^{*}=P_{\mathfrak{F}_{1}} f(y_{0})\) be dominated by \(\{x_{n}\}\) and \(y^{*}=P_{\mathfrak{F}_{2}} g(x_{0})\) be dominated by \(\{y_{n}\}\), we have \((x_{n},x^{*})\) and \((y_{n},y^{*})\) are in \(E(G)\) for all \(n\in \mathbb{N}\). From Lemma 2.7, we have \(G-VI(\zeta ,\mathcal{S}_{1})=\mathcal{S}_{1}^{-1}(0)\).
Then, \(x^{*}\in \mathcal{S}_{1}^{-1}(0)\). Since \(\mathcal{S}_{1}x^{*}=0\), we have
From the definition of \(\{x_{n}\}\), we have
Similarly, we obtain
Combining (13) and (14), we have
By induction, we can derive that
for every \(n\in \mathbb{N}\). This implies that \(\{x_{n}\}\) and \(\{y_{n}\}\) are bounded.
Step 2: We claim that \(\lim_{n \to \infty}\|x_{n+1}-x_{n}\|= \lim_{n \to \infty}\|y_{n+1}-y_{n}\|=0\).
From Proposition 3.1, we have \((x_{n},x_{n+1})\) and \((y_{n},y_{n+1})\) are in \(E(G)\) for all \(n\in \mathbb{N}\). First, we let \(U_{n}=P_{\zeta}(\alpha _{n}f(y_{n})+(1-\alpha _{n})\mathcal{B}_{1} x_{n})\) and \(V_{n}=P_{\zeta}(\alpha _{n} g(x_{n})+(1-\alpha _{n})\mathcal{B}_{2} y_{n})\). Then, we observe that
By the definition of \(x_{n}\) and (15) we obtain
Using the same method as derived in (16), we have
Applying Lemma 2.1 and the conditions (ii) and (iii) we can conclude that
Step 3: We prove that \(\lim_{n \to \infty}\|U_{n}-P_{\zeta }(I-\lambda _{1} \mathcal{S}_{1})U_{n}\|= \lim_{n \to \infty}\|U_{n}- \mathcal{B}_{1} U_{n}\|=0\).
To show this, take \(\tilde{u}_{n}=\alpha _{n}f(y_{n})+(1-\alpha _{n})\mathcal{B}_{1} x_{n}\), \(\forall n\in \mathbb{N}\).
Since \(x^{*}\) is dominated by \(\{x_{n}\}\), \(y^{*}\) is dominated by \(\{y_{n}\}\) and \((x_{n},x_{n+1})\), and \((y_{n},y_{n+1})\) are in \(E(G)\) for all \(n\in \mathbb{N}\), then we derive that
which implies that
Then, we have
Observe that
It follows that
Since \(\zeta =V(G)\) dominates \(x_{0}\) and \(U_{n},x_{n}\in \zeta \), then we have \((U_{n},x_{0})\) and \((x_{n},x_{0})\) are in \(E(G)\), for all \(n\in \mathbb{N}\). Since \(E(G)=E(G)^{-1}\) and \((x_{n},x_{0})\in E(G)\), then \((x_{0},x_{n})\in E(G)\), for all \(n\in \mathbb{N}\). By the transitivity of G and \((U_{n},x_{0}),(x_{0},x_{n})\in E(G)\), for all \(n\in \mathbb{N}\), we obtain \((U_{n},x_{n})\in E(G)\), for all \(n\in \mathbb{N}\). Since \(E(G)=E(G)^{-1}\) and \((U_{n},x_{n})\in E(G)\), then \((x_{n},U_{n})\in E(G)\), for all \(n\in \mathbb{N}\).
Observe that
by (12), (19), and (20), we obtain
Applying the same arguments as for deriving (21), we also obtain
Consider
Since
from (18), (22), and condition (ii), we obtain
Consider
Applying the same arguments as for deriving (24), we also obtain
Step 4: We claim that \(\limsup_{n \to \infty}\langle f(y^{*})-x^{*},U_{n}-x^{*} \rangle \leq 0\), where \(x^{*}=P_{\mathfrak{F}_{1}} f(y^{*})\).
First, take a subsequence \(\{U_{n_{k}}\}\) of \(\{U_{n}\}\) such that
Since \(\{x_{n}\}\) is bounded, there exists a subsequence \(\{x_{n_{k}}\}\) of \(\{x_{n}\}\) such that \(x_{n_{k}}\rightharpoonup \hat{x}\in \zeta \) as \(k\rightarrow \infty \). From (20), we obtain \(U_{n_{k}}\rightharpoonup \hat{x}\) as \(k\rightarrow \infty \). Since ζ dominates \(x_{0}\), x̂ and \(U_{n_{k}}\) are in ζ, then \((\hat{x},x_{o})\) and \((U_{n_{k}},x_{o})\) are in \(E(G)\). From \(E(G)=E(G)^{-1}\) and \((U_{n_{k}},x_{o})\in E(G)\), then \((x_{o}, U_{n_{k}})\in E(G)\). By the transitivity of G, \((\hat{x},x_{o})\) and \((x_{o}, U_{n_{k}})\) are in \(E(G)\), we have \((\hat{x}, U_{n_{k}})\in E(G)\). From \(E(G)=E(G)^{-1}\) and \((\hat{x}, U_{n_{k}})\in E(G)\), then \((U_{n_{k}},\hat{x})\in E(G)\).
Next, we need to show that \(\hat{x}\in \mathfrak{F}_{1}=F(\mathcal{B}_{1})\cap VI(\zeta , \mathcal{S}_{1})\). Assume \(\hat{x}\notin F(\mathcal{B}_{1})\). Then, we have \(\hat{x}\neq \mathcal{B}_{1} \hat{x}\). By Opial’s condition, we obtain
This is a contradiction.
Therefore,
Assume \(\hat{x}\notin VI(\zeta ,\mathcal{S}_{1})\), then we obtain \(\hat{x}\neq P_{\zeta}(I-\lambda _{1}\mathcal{S}_{1})\hat{x}\).
From Opial’s condition, \((U_{n_{k}},\hat{x})\in E(G)\) and (21), we have
This is a contradiction.
Therefore,
By (26) and (27), this yields that
Since \(U_{n_{k}}\rightharpoonup \hat{x} \) as \(k\rightarrow \infty \), (28) and Lemma 2.2, we can derive that
Following the same method as for (29), we obtain that
Step 5: Finally, we prove that the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) converge strongly to \(x^{*}=P_{\mathfrak{F}_{1}} f(y^{*})\) and \(y^{*}=P_{\mathfrak{F}_{2}} g(x^{*})\), respectively.
By the firm nonexpansiveness of \(P_{\zeta}\), \((x_{n},x_{n+1})\) and \((y_{n},y_{n+1})\) being in \(E(G)\) we derive that
which yields
From the definition of \(x_{n}\) and (31), we obtain
Similarly, as derived above, we also have
From (32) and (33), we deduce that
Applying the condition \((ii)\), (29), (30), and Lemma 2.1, we can conclude that the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) converge strongly to \(x^{*}=P_{\mathfrak{F}_{1}} f(y^{*})\) and \(y^{*}=P_{\mathfrak{F}_{2}} g(x^{*})\), respectively. This completes the proof. □
Lemma 3.3
Let ζ be a nonempty, closed, and convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\). Let \(\Lambda :\zeta \rightarrow \zeta \) be edge preserving and Λ be a \(G-\kappa \)-strictly pseudocontractive. Then, the following conditions hold;
-
(i)
Λ is \(G-\kappa \)-strictly pseudocontractive ⇔ \((I-\Lambda )\) is \(G- (\frac{1-\kappa}{2} )\)-inverse strongly monotone;
-
(ii)
\(G-VI(\zeta ,I-\Lambda )=F(\Lambda )\).
Proof
i) \((\Leftarrow ) \) Let \((x,y)\in E(G)\).
Since Λ is edge preserving and \((x,y)\in E(G)\), then \((\Lambda x,\Lambda y)\in E(G)\).
Suppose that \(M=I-\Lambda \) is \(G- (\frac{1-\kappa}{2} )-\) inverse strongly monotone, i.e.,
for all \(x,y\in \zeta \) with \((x,y)\in E(G)\). Then,
for all \(x,y\in \zeta \) with \((x,y)\in E(G)\).
Thus, Λ is a \(G-\kappa \)-strictly pseudocontractive mapping.
\((\Rightarrow )\) Conversely, suppose that \(M=I-\Lambda \) and Λ is a \(G-\kappa \)-strictly pseudocontractive mapping.
Let \(x,y\in \zeta \) with \((x,y)\in E(G)\), i.e.,
for all \(x,y\in \zeta \) with \((x,y)\in E(G)\). Then,
Hence,
for all \(x,y\in \zeta \) with \((x,y)\in E(G)\). This implies that M is a \(G-\kappa \)-strictly pseudocontractive mapping.
\(ii)\) Let \(\hat{x}\in G-VI(\zeta ,I-\Lambda )\).
From i) and Lemma 2.7, we have
This implies that \((I-\Lambda )\hat{x}=0\).
Thus, \(\hat{x}\in F(\Lambda )\). Therefore,
Let \(\breve{x}\in F(\Lambda )\) and \(y\in \zeta \) with \((\breve{x},y)\in E(G)\).
Since \(\Lambda \breve{x}=\breve{x}\), we have \((I-\Lambda )\breve{x}=0\).
This implies that \(\breve{x}\in (I-\Lambda )^{-1}(0)\).
From Lemma 2.7 and \(\breve{x}\in (I-\Lambda )^{-1}(0)\), we have
for all \(y\in \zeta \) with \((\breve{x},y)\in E(G)\). Then, \(\breve{x}\in G-VI(\zeta ,I-\Lambda )\).
Therefore,
□
Corollary 3.4
Let ζ be a nonempty, closed, and convex subset of a real Hilbert space H and let \(G=(V(G),E(G))\) be a directed graph with \(\zeta =V(G)\). Let \(E(G)\) be convex and G be transitive with \(E(G)=E(G)^{-1}\). For every \(i=1,2\), let \(\mathcal{A}_{i}:\zeta \rightarrow \zeta \) be a \(G-\kappa \)-strictly pseudocontractive mapping with \(F(\mathcal{A}_{i})\neq \emptyset \) and let \(g,f:H\rightarrow H\) be an \(a_{g}\) and \(a_{f}-G\)-contraction mapping with \(a=\max \{a_{g},a_{f}\}\). For every \(i=1,2\), let \(\mathcal{T}_{i}:\zeta \rightarrow \zeta \) be a G-nonexpansive mapping and \(\Lambda _{i}:\zeta \rightarrow \zeta \) be a \(G-\kappa _{i}\)-strictly pseudocontractive mapping with \(k=\max \{\kappa _{1},\kappa _{2}\}\). Define a mapping \(\mathcal{B}_{i}:\zeta \rightarrow \zeta \) by \(\mathcal{B}_{i}x=\mathcal{T}_{i}((1-b)I+b\Lambda _{i})x\) for all \(x\in \zeta \) and \(i=1,2\), \(b\in (0,1-k)\). Assume that \(\mathfrak{F}_{i}=F(\mathcal{B}_{i})\cap F(\mathcal{A}_{i})\neq \emptyset \) for all \(i=1,2\) with \(F(\mathcal{B}_{i})\times F(\mathcal{B}_{i})\subseteq E(G)\) and \(G-VI(\zeta ,\mathcal{S}_{i})\times G-VI(\zeta ,\mathcal{S}_{i}) \subseteq E(G)\) for all \(i=1,2\) and there exists \(x_{0},y_{0}\in \zeta \) such that \((x_{0},x_{0})\) and \((y_{0},y_{0})\) are in \(E(G)\) and \(\zeta =V(G)\) dominates \(x_{0}\) and \(y_{0}\). Let the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) be generated by \(x_{0},y_{0}\in \zeta \) and
where \(\{\delta _{n} \}, \{\eta _{n} \}, \{ \mu _{n} \}, \{\alpha _{n} \} \subseteq [0,1]\) with \(\delta _{n}+\eta _{n}+\mu _{n}=1\) and \(\lambda \in (0,2\alpha )\) with \(\alpha =\min\{\frac{1-\kappa _{1}}{2}, \frac{1-\kappa _{2}}{2}\}\). Assume the following conditions hold;
-
(i)
\(0 <\xi \leq \delta _{n},\eta _{n}\), \(\mu _{n}\leq \bar{\xi}\) for all \(n\in N\) and for some \(\xi ,\bar{\xi}>0\);
-
(ii)
\(\lim_{n \rightarrow \infty} \alpha _{n}=0\) and \(\sum_{n=1}^{\infty} \alpha _{n} = \infty \);
-
(iii)
\(\sum_{n=1}^{\infty} \lvert \delta _{n+1}-\delta _{n} \rvert < \infty \), \(\sum_{n=1}^{\infty} \lvert \eta _{n+1}-\eta _{n} \rvert < \infty \), \(\sum_{n=1}^{\infty} \lvert \alpha _{n+1}-\alpha _{n} \rvert < \infty \).
If \(\{x_{n}\}\) dominates \(P_{\mathfrak{F}_{1}} f(y_{0})\) and \(\{y_{n}\}\) dominates \(P_{\mathfrak{F}_{2}} g(x_{0})\), then \(\{x_{n}\}\) converges strongly to \(x^{*}=P_{\mathfrak{F}_{1}} f(y_{0})\) and \(\{y_{n}\}\) converges strongly to \(y^{*}=P_{\mathfrak{F}_{2}} g(x_{0})\), where \(P_{\mathfrak{F}_{i}}\) is a metric projection on \(\mathfrak{F}_{i}\), for all \(i=1,2\).
Proof
From Theorem 3.2 and Lemma 3.3, we have the desired conclusion. □
4 Example
In this section, we give some examples to support our main theorem.
Example 4.1
Let \(H=\mathbb{R}\) and \(\zeta =[-10,10]\) and let \(G=(V(G),E(G))\) be such that \(V(G)=\zeta \), \(E(G)=\{ (x,y) : xy>0\}\). Let \(\mathcal{T}_{1}:[-10,10]\rightarrow [-10,10]\) be defined by
for all \(x\in [-10,10]\) and let \(\mathcal{T}_{2}:[-10,10]\rightarrow [-10,10]\) be defined by
for all \(x\in [-10,10]\).
Let \(\Lambda _{1}:[-10,10]\rightarrow [-10,10]\) be defined by
for all \(x\in [-10,10]\) and let \(\Lambda _{2}:[-10,10]\rightarrow [-10,10]\) be defined by
for all \(x\in [-10,10]\).
Let \(\mathcal{S}_{1}:[-10,10]\rightarrow \mathbb{R}\) be defined by
for all \(x\in [-10,10]\), and let \(\mathcal{S}_{2}:[-10,10]\rightarrow \mathbb{R}\) be defined by
For every \(i=1,2\), let \(\mathcal{B}_{i}:\zeta \rightarrow \zeta \) be defined by \(\mathcal{B}_{i}x=\mathcal{T}_{i}(0.5I+0.5\Lambda _{i})x\) for all \(x\in [-10,10]\). Let \(f,g:\mathbb{R}\rightarrow \mathbb{R}\) be defined by
and
Let the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) be generated by \(x_{0},y_{0}\in \zeta \) and
Then, the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) converge strongly to 1.
Solution. For every \(i=1,2\), it is clear that \(\mathcal{S}_{i}^{-1}(0)\neq \emptyset \), since \(1\in \mathcal{S}_{i}^{-1}(0)\), \(E(G)=E(G)^{-1}\) and \(E(G)\) is convex. By the definitions of \(\mathcal{T}_{1}\), \(\mathcal{T}_{2}\), f, g, \(\mathcal{S}_{1}\), \(\mathcal{S}_{2}\), \(\Lambda _{1}\), and \(\Lambda _{2}\), we have \(\mathcal{T}_{1}\) and \(\mathcal{T}_{2}\) are G-nonexpansive mappings, f and g are G-contraction mappings, \(\mathcal{S}_{1}\) and \(\mathcal{S}_{2}\) are G-12, \(\frac{\sqrt{19}}{2}\)-inverse strongly monotone mappings, respectively, \(\Lambda _{1}\) and \(\Lambda _{2}\) are G-\(\frac{1}{2}\), \(\frac{1}{3}\)-strictly pseudocontractive mappings, respectively. However, \(\mathcal{T}_{1}\) and \(\mathcal{T}_{2}\) are not nonexpansive mappings, as if we choose \(x_{1}=1\), \(y_{1}=-\frac{1}{5}\), \(x_{2}=0\) and \(y_{2}=1\), then we see that \(\lvert \mathcal{T}_{1}x_{1}-\mathcal{T}_{1}y_{1} \rvert =2> \frac{6}{5}=\lvert x_{1}-y_{1} \rvert \) and \(\lvert \mathcal{T}_{2}x_{2}-\mathcal{T}_{2}y_{2} \rvert =1.5>1= \lvert x_{2}-y_{2} \rvert \).
f and g are not contraction mappings, as if we choose \(x=\frac{1}{4}\) and \(y=-\frac{1}{5}\), then we see that \(\lvert f(x)-f(y) \rvert =1>\frac{7}{10}=\lvert x-y \rvert \) and \(\lvert g(x)-g(y) \rvert =\lvert \frac{5}{6}-\frac{1}{6} \rvert = \frac{4}{6}>\frac{9}{20}=\lvert \frac{1}{4}+\frac{1}{5} \rvert = \lvert x-y \rvert \).
\(\mathcal{S}_{1}\) and \(\mathcal{S}_{2}\) are not 12, \(\frac{\sqrt{19}}{2}\)-inverse strongly monotone mappings, respectively. If \(x=2\) and \(y=10\) with \((2,10)\in E(G)\), then
If \(x=10\) and \(y=8\) with \((10,8)\in E(G)\), then
\(\Lambda _{1}\) and \(\Lambda _{2}\) are not \(\frac{1}{2}\), \(\frac{1}{3}\)-strictly pseudocontractive mappings, respectively, as if we choose \(x=1\) and \(y=-\frac{1}{5}\), then we have
and
By the definitions of \(\mathcal{S}_{i}\), \(\mathcal{T}_{i}\), and \(\Lambda _{i}\) for every \(i=1,2\), we have \(1=F(\mathcal{B}_{i})\cap G-VI(\zeta ,\mathcal{S}_{i})\). We observed that the parameters satisfy all the conditions of Theorem 3.2. Hence, we can conclude that the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) converge strongly to 1.
Newton’s Method is a mathematical tool often used in numerical analysis, which serves to approximate numerical solutions (i.e., x-intercepts, zeros, or roots). Given a function \(g(x)\) defined over the domain of real numbers x, and the derivative of said function \(g'(x)\). If \(x_{n}\) is an approximation of a solution of \(g(x)=0\) and if \(\acute{g}(x_{n})\neq 0\), the next approximation defined for each \(n=0,1,2,\ldots \) by:
where \(x_{0}\) is an initial point, is the most popular, studied, and used method for generating a sequence \(\{x_{n}\}\) approximating the solution.
Newton’s Method (37) is also an example of Picard iteration, for the equation
where \(T=I-\frac{g}{g'}\). Several authors have used the Picard iteration for approximation of fixed points (see [5, 6, 9]).
Π is an important mathematic constant. The search for the accurate value of Π led not only to more accuracy, but also to the development of new concepts and techniques. Many researches have been trying to approximate the value of Π (see [2, 7]). By using our main result, we introduce a new method to approximate the value of Π as shown in the following example.
Example 4.2
Let \(H=\mathbb{R}\) and \(\zeta =[3,4]\) and let \(G=(V(G),E(G))\) be a directed graph with \(V(G)=\zeta \), \(E(G)=\{ (x,y) : x,y\in [3,\frac{11}{3}]\}\). For an approximate value of Π, for every \(i=1,2\), define \(F_{i}:C\rightarrow H\) by \(F_{i}(x)=\frac{x}{5i}-\frac{\Pi}{5i}\) and \(F_{i}\) is a subdifferentiable. It is easy to show that \(I- \frac{F_{i}}{F'_{i}}\) is a G-nonexpansive mapping.
For every \(i=1,2\), define \(\mathcal{T}_{i}:[3,4]\rightarrow [3,4]\) by
for all \(x\in [3,4]\).
For every \(i=1,2\), let \(\Lambda _{i}:[3,4]\rightarrow [3,4]\) be defined by
for all \(x\in [3,4]\).
For every \(i=1,2\), let \(\mathcal{S}_{i}:[3,4]\rightarrow \mathbb{R}\) be defined by
for all \(x\in [3,4]\).
For every \(i=1,2\), let \(\mathcal{B}_{i}:\zeta \rightarrow \zeta \) be defined by \(\mathcal{B}_{i}x=\mathcal{T}_{i}(0.5I+0.5\Lambda _{i})x\) for all \(x\in [3,4]\). Let \(f,g:\mathbb{R}\rightarrow \mathbb{R}\) be defined by
and
Let the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) be generated by \(x_{0},y_{0}\in \zeta \) and
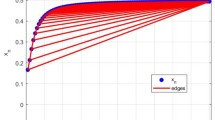
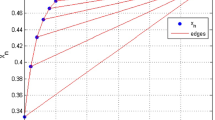
Then, the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) converge strongly to Π.
Solution. For every \(i=1,2\), it is clear that \(\mathcal{S}_{i}^{-1}(0)\neq \emptyset \), since \(\Pi \in \mathcal{S}_{i}^{-1}(0)\), \(E(G)=E(G)^{-1}\) and \(E(G)\) is convex. By the definitions of \(\mathcal{T}_{1}\), \(\mathcal{T}_{2}\), f, g, \(\mathcal{S}_{1}\), \(\mathcal{S}_{2}\), \(\Lambda _{1}\), and \(\Lambda _{2}\), we have \(\mathcal{T}_{1}\) and \(\mathcal{T}_{2}\) are G-nonexpansive mappings, f and g are G-contraction mappings, \(\mathcal{S}_{1}\) and \(\mathcal{S}_{2}\) are G-\(\frac{3\Pi}{2}\), \(\frac{3\Pi}{4}\)-inverse strongly monotone mappings, respectively, \(\Lambda _{1}\) and \(\Lambda _{2}\) are G-\(\frac{1}{15}\)-strictly pseudocontractive mappings.
By the definitions of \(\mathcal{S}_{i}\), \(\mathcal{T}_{i}\), and \(\Lambda _{i}\) for every \(i=1,2\), we have \(\Pi =F(\mathcal{B}_{i})\cap G-VI(\zeta ,\mathcal{S}_{i})\). We observed that the parameters satisfy all the conditions of Theorem 3.2. Hence, we can conclude that the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) converge strongly to Π.
Using the algorithm (38), we have the numerical result to approximate the value of Π as shown in Table 1 and Fig. 1, where \(x_{1}=y_{1}=4.00000\) and \(n=N=150\).

The convergence of \(\{x_{n}\}\) and \(\{y_{n}\}\) with initial values \(x_{1}=y_{1}=4.00000\) and \(n=N=150\)
Remark 1
We show that \(\mathcal{T}_{1}\) and \(\mathcal{T}_{2}\) are not nonexpansive mappings, as if we choose \(x_{1}=x_{2}=4\), \(y_{1}=\frac{11}{3}\) and \(y_{2}=3.5\), then we see that \(\lvert \mathcal{T}_{1}x_{1}-\mathcal{T}_{1}y_{1} \rvert =0.526>0.3= \lvert x_{1}-y_{1} \rvert \) and \(\lvert \mathcal{T}_{2}x_{2}-\mathcal{T}_{2}y_{2} \rvert =0.526>0.5= \lvert x_{2}-y_{2} \rvert \).
f and g are not contraction mappings, as if we choose \(x_{1}=\frac{25}{10}\), \(x_{2}=\frac{29}{10}\) and \(y_{1}=y_{2}=3\), then we see that \(\lvert f(x_{1})-f(y_{1}) \rvert =0.67>0.5=\lvert x_{1}-y_{1} \rvert \) and \(\lvert g(x_{2})-g(y_{2}) \rvert =0.3>0.1=\lvert x_{2}-y_{2} \rvert \).
\(\mathcal{S}_{1}\) and \(\mathcal{S}_{2}\) are not \(\frac{3\Pi}{2}\), \(\frac{3\Pi}{4}\)-inverse strongly monotone mappings, respectively. If \(x_{1}=x_{2}=3.5\) and \(y_{1}=y_{2}=3\) with \((3.5,3)\in E(G)\), then
and
\(\Lambda _{1}\) and \(\Lambda _{2}\) are not \(\frac{1}{15}\)-strictly pseudocontractive mappings, as if we choose \(x_{1}=x_{2}=4\) and \(y_{1}=y_{2}=\frac{11}{3}\), then we have \(\lvert \Lambda _{1}x_{1}-\Lambda _{1}y_{1} \rvert ^{2}=0.24>0.22= \lvert x_{1}-y_{1} \rvert ^{2}+\frac{1}{15}\lvert (I-\Lambda _{1})x_{1}-(I- \Lambda _{1})y_{1} \rvert ^{2}\), and \(\lvert \Lambda _{2}x_{2}-\Lambda _{2}y_{2} \rvert ^{2}=0.32>0.22= \lvert x_{2}-y_{2} \rvert ^{2}+\frac{1}{15}\lvert (I-\Lambda _{1})x_{2}-(I- \Lambda _{1})y_{2} \rvert ^{2}\).
5 Conclusion
In this work, we introduce the definition of a \(G-\kappa \)-strictly pseudocontractive mapping that is different from a κ-strictly pseudocontractive mapping and prove a strong convergence theorem for finding the fixed points of two G-κ-strictly pseudocontractive mappings, two G-nonexpansive mappings, and two G-variational inequality problems in a Hilbert space endowed with a directed graph. However, we should like to note the following:
(1) Our result is proved without the Property G.
(2) We give some examples to support our main theorem and we have the numerical result to approximate the value of Π as shown in Table 1 and Fig. 1.
Availability of data and materials
All data generated or analyzed during this study are included in this published article.
References
Alakoya, T.O., Owolabi, A.O.E., Mewomo, O.T.: An inertial algorithm with a self-adaptive step size for a split equilibrium problem and a fixed point problem of an infinite family of strict pseudo-contractions. J. Nonlinear Var. Anal. 5, 803–829 (2021)
Bailey, D.H.: The computation of Pi to 29360000 decimal digit using Borweins’ quartically convergent algorithm. Math. Comput. 50, 283–296 (1988)
Balooee, J., Postolache, M., Yao, Y.: System of generalized nonlinear variational-like inequalities and nearly asymptotically nonexpansive mappings: graph convergence and fixed point problems. Ann. Funct. Anal. 13(4), Article number 68 (2022)
Bello, A.U., Omojola, M.T., Nnakwe, M.O.: Two methods for solving split common fixed point problems of strict pseudo-contractve mappings in Hilbert spaces with applications. Appl. Set-Valued Anal. Optim. 3, 75–93 (2021)
Berinde, V.: Approximating fixed points of weak contractions using the Picard iteration. Nonlinear Anal. Forum 9(1), 43–53 (2004)
Berinde, V.: Picard iteration converges faster than Mann iteration for a class of quasi-contractive operators. Fixed Point Theory Appl. 2004, 716359 (2004). https://doi.org/10.1155/s1687182004311058
Borwein, J.M., Borwein, P.B., Bailey, D.H.: Ramanujan, modular equations and approximations to Pi or how to compute one billion digits of Pi. Am. Math. Mon. 96, 201–219 (1988)
Browder, F.E., Petryshyn, W.V.: Construction of fixed points nonlinear mappings in Hilbert space. J. Math. Anal. Appl. 20, 197–228 (1967)
Chidume, C.E.: Strong convergence and stability of Picard iteration sequences for a general class of contractive-tye mappings. Fixed Point Theory Appl. 2014, 233 (2014). https://doi.org/10.1186/1687-1812-2014-233
Ishikawa, S.: Fixed points by a new iteration method. Proc. Am. Math. Soc. 44, 147–150 (1974)
Ishikawa, S.: Fixed points and iteration of a nonexpansive mapping in a Banach space. Proc. Am. Math. Soc. 59, 65–71 (1976)
Jachymski, J.: The contraction principle for mappings on a metric space with a graph. Proc. Am. Math. Soc. 136(4), 1359–1373 (2008)
Je Cho, Y., Kang, S.M., Qin, X.: Some results on κ-strictly pseudo-contractive mappings in Hilbert spaces. Nonlinear Anal. 70, 1956–1964 (2009)
Kangtunyakarn, A.: The variational inequality problem in Hilbert spaces endowed with graphs. J. Fixed Point Theory Appl. 22(1), 4 (2019)
Ke, Y., Ma, C.: Strong convergence theorem for a common fixed point of a finite family of strictly pseudo-contractive mappings and a strictly pseudononspreading mapping. Fixed Point Theory Appl. 2015, 116 (2015)
Khuansatung, W., Kangtunyakarn, A.: The method for solving fixed point problem of G-nonexpansive mapping in Hilbert spaces endowed with graphs and numerical example. Indian J. Pure Appl. Math. 51(1), 155–170 (2020)
Latif, A., Al Subaie, R.F., Alansari, M.O.: Fixed points of generalized multi-valued contractive mappings in metric type spaces. J. Nonlinear Var. Anal. 6, 123–138 (2022)
Lv, S.T.: An extragradient-like iterative process for cococercive mappings and strictly pseudocontractive mappings. J. Nonlinear Funct. Anal. 2022, 18 (2022)
Moudafi, A.: Viscosity approximation methods for fixed points problems. J. Math. Anal. Appl. 241, 46–55 (2000)
Noor, M.A., Noor, K.I.: Some new trends in mixed variational inequalities. J. Adv. Math. Stud. 15(2), 105–140 (2022)
Opial, Z.: Weak convergence of the sequence of successive approximation of nonexpansive mappings. Bull. Am. Math. Soc. 73, 591–597 (1967)
Stampacchia, G.: Formes bilineaires coercivites sur les ensembles convexes. C. R. Acad. Sci. Paris 258, 4413–4416 (1964)
Taiwo, A., Mewomo, O.T., Gibali, A.: A simple strong convergent method for solving split common fixed point problems. J. Nonlinear Var. Anal. 5, 777–793 (2021)
Takahashi, W.: Nonlinear Function Analysis. Yokohama Publishers, Yokohama (2000)
Tiammee, J., Kaewkhao, A., Suantai, S.: On Browder’s convergence theorem and Halpern iteration process for G-nonexpansive mappings in Hilbert spaces endowed with graphs. Fixed Point Theory Appl. 2015, 187 (2015)
Wattanataweekul, M., Klanarong, C.: Convergence theorems for common fixed points of two G-nonexpansive mappings in a Banach space with a directed graph. Thai J. Math. 16, 503–516 (2018)
Xu, H.K.: An iterative approach to quadric optimization. J. Optim. Theory Appl. 116, 659–678 (2003)
Yambangwai, D., Aunruean, S., Thianwan, T.: A new modified three-step iteration method for G-nonexpansive mappings in Banach spaces with graph. Numer. Algorithms 84, 537–565 (2020)
Yao, Y., Cheng, Y.C., Kang, S.: Itertive methods for κ-strictly pseudo-contractive mappings in Hilbert spaces. An. Ştiinţ. Univ. ‘Ovidius’ Constanţa, Ser. Mat. 19, 313–330 (2011)
Yao, Y., Shahzad, N., Yao, J.C.: Convergence of Tseng-type self-adaptive algorithms for variational inequalities and fixed point problems. Carpath. J. Math. 37, 541–550 (2021)
Yao, Z., Kang, S.M., Li, H.J.: An intermixed algorithm for strict pseudo-contractions in Hilbert spaces. Fixed Point Theory Appl. 2015, 206 (2015)
Acknowledgements
This research is supported by King Mongkut’s Institute of Technology Ladkrabang (Grant No. 2566-02-05-002).
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
AK dealt with the conceptualization, formal analysis, supervision, writing-review and editing. AS writing-original draft, formal analysis, writing-review and editing. Both authors have read and approved the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sripattanet, A., Kangtunyakarn, A. Approximation of G-variational inequality problems and fixed-point problems of G-κ-strictly pseudocontractive mappings by an intermixed method endowed with a graph. J Inequal Appl 2023, 63 (2023). https://doi.org/10.1186/s13660-023-02975-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13660-023-02975-5