
Abstract
Real-time monitoring of heart rate (HR), i.e., extraction of heart rate variability (HRV), plays an important role in diagnosis and prevention of cardiovascular diseases. Compared with traditional contact monitoring devices, the use of continuous wave (CW) Doppler radar to monitor HRV does not require contact and is not sensitive to light and temperature, which makes it more and more popular. To monitor the HRV based on CW Doppler radar, the time window must be shortened to less than 5 s, which will lead to the spectrum leakage and degrade the measurement accuracy of HRV. To solve this problem, a custom CW Doppler radar has been developed in an integrated fashion on a single PCB, whose transmitting frequency and power of the radar are 24 GHz and 3 dBm, respectively. Furthermore, four frequency interpolation algorithms are introduced to compare their extraction accuracy. Experiments are performed on three subjects, and results show that the Quinn algorithm can obtain best HRV extraction results compared with other algorithms. Specially, the average HRV extraction error is 3.61% using the Quinn algorithm.
Similar content being viewed by others

1 Introduction
Physiological signal is of great significance in human health care, of which heart rate variability (HRV) is an important indicator for people’s condition, especially for patients with cardiovascular diseases [1, 2]. In addition, the monitoring of people’s HRV features is also required in numerous applications, such as anxiety treatments [3], stress and emotions recognition [4, 5], vigilance monitoring [6], training optimization [7], etc. As a result, monitoring the heart rate in real time to obtain the HRV is requisite in many applications.
To achieve the HRV monitoring, the traditional devices are mainly contact sensors, such as PPG (photoplethysmogram) sensors [8], ECG (electrocardiogram) sensors, and piezoelectric or piezoresistive sensors. However, there are obvious disadvantages for the use of contact sensors. First, they may limit the patients’ mobility caused by sensors placed on the human body [9] and influence the measurement results due to the patients’ awareness of the measurement being performed [10]. Second, they are difficult to be applied to some special patients’ who have psychiatric illnesses or damaged skin, such as burns, painful skin rashes, hives, etc. [11]. To obtain better usability, it is necessary to realize remote monitoring of HRV using non-contact sensors [12].
The technology based on continuous wave (CW) Doppler radar is one of the most promising methods for non-contact measurement of HRV [13,14,15,16,17,18,19,20]. With the non-contact and noninvasive characteristics, the CW Doppler radar can detect micro-motions caused by human physiological movements due to respiration and heartbeat through the phase modulation effect without contacting patients’ body [21]. Compared with the traditional contact sensors, the CW Doppler radar possesses evident advantages, such as insensitive to light and temperature [22], availability to the patients with burn or skin disease [23], and good penetrability of electromagnetic wave that can pass through clothing [24].
Although given these advantages of CW Doppler radar, there are still two challenges when implementing the measurement of HRV, the first is how to cope with the harmonics interference originated from respiration signals [25] and the second is how to extract heart rate (HR) in real time, in other words, how to monitor HR in a short time window with low computation complexity [26]. According to the equation ∆f = 1/T, where ∆f is the frequency resolution and T is the length of the time window, a short time window will reduce the frequency resolution. For these challenges, many researches have been carried out to achieve HR measurement using the CW Doppler radar. A novel respiration harmonics cancellation technique for HR extraction is applied, which applies complex signal demodulation [27]. An adaptive harmonics comb notch digital filter is proposed to remove respiration harmonics without removing the heartbeat signal [28]. Apart from this, a supervised learning approach for harmonics cancellation is proposed in [29]. However, this method requires a more accurate external HR reference source, making it impractical in practical applications. In addition, these methods mentioned above deal with the interference of respiratory harmonics, but all of them require a long-time window to achieve HR acquisition. For this reason, a wavelet transform-based data length variation algorithm is proposed in [30], which can distinguish between heartbeat signals and respiratory harmonics, and extract HR using 3–5 s data length. Nevertheless, this method is computationally intensive since the high-resolution wavelet frequency spectrum requires multiple wavelet transforms [26].
In this paper, the frequency interpolation algorithm for real-time measurement of heart rate with CW Doppler has been proposed. Specifically, in order to suppress respiratory harmonics and extract HRV with high precision, this paper proposes to use high-pass filter (HPF) to filter respiratory harmonics. Then, four frequency interpolation algorithms, i.e., the Quinn estimation method, the Macloed estimation method, the Jacobsen estimation method and the Candan estimation method, are introduced to extract HRV and compare their accuracy in extracting HRV.
2 CW Doppler radar sensor
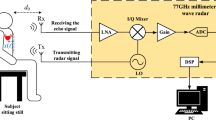
Figure 1 depicts the HRV monitoring system using the CW Doppler radar sensor. In the sensor, a voltage-controlled oscillator (VCO) generates an unmodulated signal, which is divided equally by a power divider, the part of which is used as the transmitted signal T(t), and the other part is used as the local oscillator signal L(t). Neglecting amplitude variations, the T(t) can be expressed as [31]
where f is the frequency of the transmitted signal, t is the elapsed time, and ϕ(t) is the initial phase noise of the transmitted signal. As depicted in Fig. 1, the transmitted signal T(t) will hit the chest of the target at a nominal distance of d0 from the radar, and then it will be reflected back and received by the antenna. Assume the movement of chest caused by respiration and heartbeat is x(t), so the received signal R(t) can be expressed as [32]
where λ is the wavelength of the transmitted signal, c is the velocity of radio wave (i.e., the propagation velocity of light in the vacuum). To retrieve the Doppler signals caused by respiration and heartbeat, a quadrature mixer is used to demodulate R(t) into in-phase (I) and quadrature (Q) channels with phase shift of π/2, which can be expressed as [9]
where θ = (4πd0)/λ is the fixed phase shift which depends on the nominal distance d0 and the wavelength λ of the transmitted signal, ∆ϕ(t) = ϕ(t) − ϕ(t − 2d0/c) is the residual phase noise, which can be neglected since the distance between CW Doppler radar and target is small [31]. And the x(t) can be expressed
where xh(t) and xr(t) represent chest-wall movement due to heartbeat and respiration, respectively. Specifically, mh and mr are the amplitude caused by heartbeat and respiration, respectively; ωh and ωr are the angular frequency caused by heartbeat and respiration, respectively.

The HRV monitoring system using the CW Doppler radar sensor
In general, the BI(t) and BQ(t) will be sampled by the analog-to-digital conversion (ADC) and combined as a complex signal in laptop to solve the null point problem [33], which can be expressed as [34]
where j is the imaginary unit. Equation (5) can be represented in its equivalent Fourier series form as [35]
where φ = θ + ∆ϕ(t) is the total residual phase. DCIQ is the direct current components of the signals. Cij = Ji(4πmr/λ) ∙ Jj(4πmh/λ) determines the amplitude of every frequency component and Jn is the Bessel function of the first kind. It can be seen from Eq. (6) that there are respiratory harmonics in the baseband spectrum. To solve the problem, the HPF is used to filter out the respiratory harmonics.
3 The spectrum leakage effect
In Sect. 1, it has been described that a short time window will reduce the frequency resolution. In this section, it will be explained why the frequency extraction accuracy also decreases as the frequency resolution decreases.
For ease of illustration, it is assumed that the tested signal is a single frequency signal with angular frequency of ω0 and amplitude of A0, which can be expressed as
So, the Fourier transform of x(t) is
where δ(ω) is the Dirac Delta function. As a result, the spectrum of x(t) is a line located at ω0 when it is not truncated by any window functions, as the red solid line shown in Fig. 2. However, in real signal processing, the length of the signal cannot be infinitely long. Generally, the signal needs to be truncated to facilitate subsequent processing. The rectangular window function is the most commonly used, which can be described as
where T is the length of the rectangular window function.

The HRV monitoring system using the CW Doppler radar sensor
Therefore, the signal x(t) with a time duration T can be considered to be truncated by a rectangular window function wT(t), which can be represented as
As a result, the Fourier transform of \(\overline{x}(t)\) can be expressed as
The amplitude of \(\overline{X}(\omega )\) is shown in Fig. 2 with the cyan solid line. It can be seen that the spectrum \(\overline{X}(\omega )\) of \(\overline{x}(t)\) is no longer a single line but distributed along the whole frequency axis, which means that the energy is no longer concentrated and the leakage has arisen.
To process the signal \(\overline{x}(t)\) in digital domain, it will be sampled and A/D transformed. Then, the sampled signal of \(\overline{x}(t)\) can be written as
where N = T/∆t. And ∆t is the reciprocal of the sample rate fs. The discrete Fourier transform (DFT) of \(\overline{x}[n]\) can be expressed as
where ∆ω = 2π/T. The amplitude \(\overline{X}[n]\) is shown in Fig. 2 with pink point. It can be seen from Fig. 2 that the ω0 is not an integral multiple of ∆ω. As a result, the accurate frequency ω0 can’t be acquired without sampling in the whole time period, even though the measured signal only has a single frequency. This phenomenon is called grid effect. So, when the length T of window function is shorter, the ∆ω is bigger. As a result, the frequency extraction accuracy may be lower.
4 The frequency interpolation methods
According to Fig. 2, it is not appropriate to select the k∆ω as the extraction frequency of ω0. To solve the problem, three frequency-domain peak samples, i.e., \(\overline{X}[k]\), \(\overline{X}[k + 1]\) and \(\overline{X}[k - 1]\), will be used to estimate the frequency ω0. In this section, four frequency interpolation algorithms which use these three frequency-domain peak samples will be introduced to estimate the frequency and compare their HR extraction accuracy based on the CW Doppler radar and a signal of length 3 s.
4.1 The Quinn estimation algorithm [36]
Let
and
If both γ1 > 0 and γ2 > 0, let γ = γ2; else, let γ = γ1. Finally, the estimated frequency is
4.2 The Macloed estimation algorithm [37]
Let
where
As a result, the estimated frequency is same as Eq. (16).
4.3 The Jacobsen estimation algorithm [38]
Let
Similarly, using Eq. (16) to estimate the frequency f based on the γ extracted in Eq. (19).
4.4 The Candan estimation algorithm [39]
Let
where
So, the estimated frequency f can be obtained by applying Eq. (16) based on the γ extracted in Eq. (21).
5 Results and discussion
In order to evaluate the performance of these four different frequency interpolation algorithms, a CW Doppler radar is constructed as a platform for acquiring vital signs signals. The constructed Doppler radar system is shown in Fig. 3. The radio frequency (RF) front end circuits and the receiver circuits have been developed in an integrated fashion on a single PCB, which has a size of 4.3 × 4.1 cm as shown in Fig. 4. The substrate material used for the RF board is Rogers RO4350B (dielectric constant = 3.66, loss tangent δ = 0.0037, conductor thickness = 35.56 μm, substrate thickness = 20 mil). In order to minimize the coupling between the receiver and the transmitter, which is a serious problem faced by many CW Doppler radars, two antennas are used, one of which is used as a receiving antenna and the other is used as a transmitting antenna. The transmitting frequency and power of the radar are 24 GHz and 3 dBm, respectively. The output baseband I/Q signals are sampled at 20 Hz and digitized by the data acquisition system (National Instruments USB-6211) with LabVIEW running in real time on the laptop.

The photograph of the CW Doppler radar

The RF broad of the CW Doppler radar sensor
The measurement duration of each experiment is 90 s. During the experiment, three healthy subjects are asked to sit still in the chair. The distance between the human subject and the radar is 1.5 m. Meanwhile, a finger-pressure pulse sensor YX301 is attached to the subject’s index finger to measure the pulse rate simultaneously, which is used as the reference for HR.
Figure 5 shows the HR extraction results of these three subjects. The time window length is set to 3 s. It can be seen from Fig. 5 that, compared with other frequency estimation algorithms, the HR extracted by the Quinn interpolation algorithm is closer to the reference frequency. However, it can also be seen that even the HR extracted by Quinn interpolation algorithm cannot well follow the change of the reference HR. This may be due to the fact that the filter does not filter out respiratory harmonics well. Figure 6 shows the HR extraction errors. The errors in Fig. 6 are calculated as

The HR extraction results of three subjects

The HR extraction errors of three subjects
The average errors are calculated as
where L is the number of measurement conditions. And the average errors of three subjects are shown in Table 1. It can be seen from Table 1 that the Quinn interpolation algorithm has the lowest HRV estimation error, which is 3.61%.
6 Conclusion
Extraction of HRV plays a great role in indicating the people’s condition, especially for patients with cardiovascular diseases. To extract HRV, the window length should be shortened to less than 5 s. However, the shortened window will reduce the HR measurement accuracy due to the spectrum leakage. Aiming at this problem, this paper introduces four frequency interpolation algorithms based on CW Doppler radar. Experimental results show that the Quinn algorithm can obtain the best HRV extraction results compared with other frequency interpolation algorithms. Specifically, based on a signal window length of 3 s, the average error of extracted HR using Quinn algorithm is 3.61%.
Availability of data and materials
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.
Abbreviations
- HR:
-
Heart rate
- HRV:
-
Heart rate variability
- CW:
-
Continuous wave
- HPF:
-
High-pass filter
- VCO:
-
Voltage-controlled oscillator
- ADC:
-
Analog-to-digital conversion
- RF:
-
Radio frequency
References
B.S. Chandra, C.S. Sastry, S. Jana, Robust heartbeat detection from multimodal data via CNN-based generalizable information fusion. IEEE Trans. Biomed. Eng. 66(3), 710–717 (2019)
Y. Iwata, H.T. Thanh, G. Sun, K. Ishibashi, High accuracy heartbeat detection from CW-Doppler radar using singular value decomposition and matched filter. Sensor 21, 1–15 (2021)
J.A. Chalmers, D.S. Quintana, M.J.-A. Abbott, A.H. Kemp, Anxiety disorders are associated with reduced heart rate variability: a meta-analysis. Front. Psychiatry 5, 80 (2014)
Y. Li et al., Pilot stress detection through physiological signals using a transformer-based deep learning model. IEEE Sens. J. 23(11), 11774–11784 (2023)
M. Zhao, F. Adib, D. Katabi, Emotion recognition using wireless signals, in Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking, New York, NY, USA (2016), pp. 95–108
B.-G. Lee, B.-L. Lee, W.-Y. Chung, Wristband-type driver vigilance monitoring system using smartwatch. IEEE Sens. J. 15(10), 5624–5633 (2015)
J. Morales et al., Use of heart rate variability in monitoring stress and recovery in judo athletes. J. Strength Cond. Res. 28(7), 1896–1905 (2014)
A. Temko, Accurate heart rate monitoring during physical exercises using PPG. IEEE Trans. Biomed. Eng. 64(9), 2016–2024 (2017)
C. Ye, K. Toyoda, T. Ohtsuki, Blind source separation on non-contact heartbeat detection by non-negative matrix factorization algorithms. IEEE Trans. Biomed. Eng. 67(2), 482–494 (2020)
M. Ishijima, Cardiopulmonary monitoring by textile electrodes without subject-awareness of being monitored. Med. Biol. Eng. Comput. 35(6), 685–690 (1997)
J. Park et al., Polyphase-basis discrete cosine transform for real-time measurement of heart rate with CW Doppler radar. IEEE Trans. Microw. Theory Tech. 66(3), 1644–1659 (2018)
S. Dong et al., Doppler cardiogram: a remote detection of human heart activities. IEEE Trans. Microw. Theory Tech. 68(3), 1132–1141 (2020)
C. Li, J. Ling, J. Li, J. Lin, Accurate Doppler radar noncontact vital sign detection using the RELAX algorithm. IEEE Trans. Instrum. Meas. 59(3), 687–695 (2010)
F.-K. Wang, T.-S. Horng, K.-C. Peng, J.-K. Jau, J.-Y. Li, C.-C. Chen, Single-antenna Doppler radars using self and mutual injection locking for vital sign detection with random body movement cancellation. IEEE Trans. Microw. Theory Tech. 59(12), 3577–3587 (2011)
S. Bakhtiari, S. Liao, T. Elmer, N.S. Gopalsami, A.C. Raptis, A real-time heart rate analysis for a remote millimeter wave I-Q sensor. IEEE Trans. Biomed. Eng. 58(6), 1839–1845 (2011)
I. Mostafanezhad, O. Boric-Lubecke, Benefits of coherent low-IF for vital signs monitoring using Doppler radar. IEEE Trans. Microw. Theory Tech. 62(10), 2481–2487 (2014)
C. Gu, Z. Peng, C. Li, High-precision motion detection using low-complexity Doppler radar with digital post-distortion technique. IEEE Trans. Microw. Theory Tech. 64(3), 961–971 (2016)
H. Zhao, H. Hong, L. Sun, Y. Li, C. Li, X. Zhu, Noncontact physiological dynamics detection using low-power digital-IF Doppler radar. IEEE Trans. Instrum. Meas. 66(7), 1780–1788 (2017)
F.-K. Wang et al., Review of self-injection-locked radar systems for noncontact detection of vital signs. IEEE J. Electromagn. RF Microw. Med. Biol. 4(4), 294–307 (2020)
Z.-K. Yang, S. Zhao, X.-D. Huang, W. Lu, Accurate Doppler radar-based heart rate measurement using matched filter. IEICE Electron. Express 17(8), 1–6 (2020)
Z.-K. Yang, H. Shi, S. Zhao, X.-D. Huang, Vital sign detection during large-scale and fast body movements based on an adaptive noise cancellation algorithm using a single Doppler radar sensor. Sensors 20(15), 4183 (2020)
Z.-K. Yang, W.-K. Liu, S. Zhao, X.-D. Huang, A concurrent dual-band radar sensor for vital sign tracking and short-range positioning. Frequenz 74(11–12), 369–376 (2020)
C. Li et al., A review on recent advances in Doppler radar sensors for noncontact healthcare monitoring. IEEE Trans. Microw. Theory Tech. 61(5), 2046–2060 (2013)
Z.-K. Yang, H. Shi, S. Zhao, X.-D. Huang, Z. Guan, Fast heart rate extraction using CW Doppler radar with interpolated discrete Fourier transform algorithm. AIP Adv. 10(7), 075113 (2020)
M. Li, J. Lin, Wavelet-transform-based data-length-variation technique for fast heart rate detection using 5.8-GHz CW Doppler radar. IEEE Trans. Microw. Theory Tech. 59(12), 3577–3587 (2011)
Y. Ding, X. Yu, C. Lei, Y. Sun, X. Xu, J. Zhang, A novel real-time human heart rate estimation method for noncontact vital sign radar detection. IEEE Access 8, 88689–88699 (2020)
J. Tu, J. Lin, Respiration harmonics cancellation for accurate heart rate measurement in non-contact vital sign detection, in IEEE MTT-S International Microwave Symposium Digest, Seattle, WA, USA (2013), pp. 1–3
T.-Y. Huang, L. Hayward, J. Lin, Adaptive harmonics comb notch digital filter for measuring heart rate of laboratory rat using a 60-GHz radar, in IEEE MTT-S International Microwave Symposium Digest (2016), pp. 1–4
J.J. Saluja, J. Lin, J. Casanova, A supervised learning approach for real time vital sign radar harmonics cancellation, in Proceedings of IEEE International Microwave Biomedical Conference (2018), pp. 67–69
M. Li, J. Lin, Wavelet-transform-based data-length-variation technique for fast heart rate detection using 5.8-GHz CW Doppler radar. IEEE Trans. Microw. Theory Tech. 66(1), 568–576 (2018)
A.D. Droitcour, O. Boric-Lubecke, V.M. Lubecke, J. Lin, G.T.A. Kovacs, Range correlation and I/Q performance benefits in single-chip silicon Doppler radars for noncontact cardiopulmonary monitoring. IEEE Trans. Microw. Theory Tech. 52(3), 838–848 (2004)
C. Ye, T. Ohtsuki, Spectral Viterbi algorithm for contactless wide-range heart rate estimation with deep clustering. IEEE Trans. Microw. Theory Tech. 69(5), 2629–2641 (2021)
J.Y. Shih, F.K. Wang, Quadrature cosine transform (QCT) With varying window length (VWL) technique for noncontact vital sign monitoring using a continuous-wave (CW) radar. IEEE Trans. Microw. Theory Tech. 70(3), 1639–1650 (2022)
C. Li, J. Lin, Complex signal demodulation and random body movement cancellation techniques for non-contact vital sign detection, in IEEE MTT-S International Microwave Symposium Digest, Atlanta, GA (2008), pp. 567–570
C. Li, J. Lin, Optimal carrier frequency of non-contact vital sign detectors, in Proceedings of IEEE Radio and Wireless Symposium, Long Beach, CA, Jan 9–11 (2007), pp. 281–284
B.G. Quinn, Estimating frequency by interpolation using Fourier coefficients. IEEE Trans. Signal Process. 42(5), 1264–1268 (1994)
M.D. Macleod, Fast nearly ML estimation of the parameters of real or complex single tones or resolved multiple tones. IEEE Trans. Signal Process. 46(1), 141–148 (1998)
E. Jacobsen, P. Kootsookos, Fast, accurate frequency estimators [DSP Tips & Tricks]. IEEE Signal Process. Mag. 24(3), 123–125 (2007)
C. Candan, Analysis and further improvement of fine resolution frequency estimation method from three DFT samples. IEEE Signal Process. Lett. 20(9), 913–916 (2013)
Acknowledgements
The authors acknowledged the anonymous reviewers and editors for their efforts in valuable comments and suggestions.
Funding
This research was supported by the Scientific research project of Tianjin Municipal Education Commission under Grant No. 2021KJ016.
Author information
Authors and Affiliations
Contributions
HPS proposed the main idea, designed the experiments. ZKY discussed the results. HPS and ZKY wrote the paper. JS gave some important suggestions and revised the paper. All authors read and approved the final manuscript.
Corresponding authors
Ethics declarations
Ethics approval and consent to participate
This article does not contain any studies with human participants or animals performed by any of the authors.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Shi, H., Yang, Z. & Shi, J. An improved real-time detection algorithm based on frequency interpolation. J Wireless Com Network 2023, 68 (2023). https://doi.org/10.1186/s13638-023-02276-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13638-023-02276-x