
Abstract
We consider the following system of difference equations: , , , where a, b, c, d are positive constants and are initial conditions. This system has interesting dynamics and can have up to nine equilibrium points. The most complex and perhaps most interesting case is the case of nine equilibrium points, four of which are local attractors, four of which are saddle points, and one of which is a repeller. Using recent results of Kulenović and Merino we are able to characterize the basins of attractions of all local attractors and thus to describe the global dynamics of this system. This case can be considered as a two-dimensional version of the Allee effect for competitive systems.
MSC:39A10, 39A30, 37G35.
Similar content being viewed by others

1 Introduction
The following difference equation is known as the Beverton-Holt model:
where is the rate of change (growth or decay) and is the size of the population at the n th generation.
This model was introduced by Beverton and Holt in 1957. It depicts density dependent recruitment of a population with limited resources which are not shared equally. The model assumes that the per capita number of offspring is inversely proportional to a linearly increasing function of the number of adults. In other words (1) can be considered as an equation of the form
where is inversely proportional to the linear function , , which can be normalized to be .
The Beverton-Holt model is well studied and understood. It exhibits the following properties.
Theorem 1 Equation (1) has the two equilibrium points 0 and when .
-
(a)
All solutions of (1) are monotonic (increasing or decreasing) sequences.
-
(b)
If , then the zero equilibrium is a global attractor, that is, , for all .
-
(c)
If , then the equilibrium point is a global attractor, that is, , for all .
-
(d)
Both equilibrium points are globally asymptotically stable in the corresponding regions of parameters and , that is, they are global attractors with the property that small changes of initial condition result in small changes of the corresponding solution .
Furthermore, (1) can be solved explicitly and has the following solution:
which can be used to prove all the preceding properties. See [1–4].
The Allee effect is a phenomenon in biology characterized by a positive correlation between population density and per capita growth rate. The Allee effect was first written on extensively by its namesake Warder Clyde Allee. The general idea of the Allee effect is that for smaller populations, the reproduction and survival rates of individuals decrease. This effect usually saturates or disappears as populations get larger. The Allee effect has been detected in a number of discrete models; see [4–7].
The effect may be due to any number of causes. In some species, reproduction (finding a mate in particular) may be increasingly difficult as the population density decreases.
In mathematics, when the basin of attraction of the zero equilibrium of a system contains an open set, we consider the system to exhibit the Allee effect. See [4, 5].
In view of Theorem 1 the Beverton-Holt model does not exhibit the Allee effect.
1.1 Beverton-Holt type model that exhibits the Allee effect
The difference equation
which was introduced by Thompson [8] as a depensatory generalization of the Beverton-Holt stock-recruitment relationship, was used to develop a set of constraints designed to safeguard against overfishing. This model has been used in the study of fish population dynamics, particularly when overfishing is present; see [7] for further references. In view of the sigmoid shape of the function , (4) is called the sigmoid Beverton-Holt model. A very important feature of the sigmoid Beverton-Holt model is that it exhibits the Allee effect. We can see this from the following result, the proof of which is an immediate consequence of a stair-step diagram analysis.
Theorem 2 The global dynamics of Equation (4) is as follows:
-
(a)
Equation (4) has only a zero equilibrium when .
-
(b)
Equation (4) has a zero equilibrium and the positive equilibrium , when .
-
(c)
There exists a zero equilibrium and two positive equilibria, and , when .
-
(d)
All solutions of (4) are monotonic (increasing or decreasing) sequences.
-
(e)
If , then the equilibrium point 0 is a global attractor, that is, for all .
-
(f)
If , then the equilibrium point 0 is a global attractor, with the basin of attraction and is a non-hyperbolic equilibrium point with the basin of attraction .
-
(g)
If , then we have zero equilibrium and are locally asymptotically stable, while is a repeller and the basins of attraction of the equilibrium points are given as
In other words, the smaller positive equilibrium serves as the boundary between two basins of attraction. The zero equilibrium has the basin of attraction and the model exhibits the Allee effect.
-
(h)
The equilibrium points 0 and are globally asymptotically stable in the corresponding basins of attractions and .
1.2 Competitive model in two dimensions that exhibits the Allee effect
We will now consider the two-dimensional analog of (4) which is the uncoupled system
where a and b are positive parameters. System (5) can have at most nine nonnegative equilibrium points:
The dynamics of system (5) is partially described in the following theorem, with complete visual interpretation in Figure 1 can be derived from Theorem 2. Since there are three dynamics scenarios for each of two equations in (5), there are nine dynamic scenarios for system (5), which are visualized in Figure 1.

Global dynamics of uncoupled two-dimensional model (5) with nine dynamics scenarios.
Theorem 3 System (5) has the following properties:
-
(a)
All solutions of system (5) are component-wise monotonic and bounded, that is, both sequences and are monotonic and bounded.
-
(b)
If and , then there exists only a zero equilibrium, which is a global attractor.
-
(c)
If , , then the basins of attraction of the equilibrium points are given as
-
(d)
If , , then the basins of attraction of the equilibrium points are given as
-
(e)
If , , then the basins of attraction of the equilibrium points are given as
-
(f)
If , , then the basins of attraction of the equilibrium points are given as
-
(g)
If , , then the basins of attraction of the equilibrium points are given as
-
(g)
If , , then the basins of attraction of the equilibrium points are given as
-
(h)
If , , then the basins of attraction of the equilibrium points are given as
-
(i)
Case , , is symmetric to the case , .
Two species can interact in several different ways through competition, cooperation, or predator-prey interactions. For each of these interactions, we obtain variations of system (5), all of which may require a different mathematical analysis.
The following coupled system is a variation of system (5) that exhibits competitive interactions:
where . This system will be considered in the remainder of this paper. We will show that system (6) has similar but more complex dynamics than system (5). We will see that like system (5) the coupled system (6) may possess one, three, five, seven or nine equilibrium points in the hyperbolic case and two, four, six or eight equilibrium points in the non-hyperbolic case. In each of these cases we will show that the Allee effect is present and we will precisely describe the basins of attraction of all equilibrium points. We will show that the boundaries of the basins of attraction of the equilibrium points are the global stable manifolds of the saddle or the non-hyperbolic equilibrium points. See [9–15] for related results. An interesting feature of our results is that the size of the basin of attraction of the zero equilibrium decreases as a function of the number of the equilibrium points. The biological interpretation of our results is given in [16, 17] and a similar system is treated in [18]. However, no details of the proofs are provided in [16, 17] and non-hyperbolic cases were not treated there. Here we give the detailed proofs of all dynamic scenarios and provide the explicit algebraic conditions for the existence of one through nine equilibrium points, which was also missing in [16, 17]. A specific feature of our results is that no equilibrium point in the interior of the first quadrant is computable and so our analysis is based on the geometry of the equilibrium curves.
2 Preliminaries
Our proofs use some recent general results for competitive systems of difference equations of the form
where f and g are continuous functions and is non-decreasing in x and non-increasing in y and is non-increasing in x and non-decreasing in y in some domain A.
Competitive systems of the form (7) were studied by many authors in [14, 15, 19–37] and others.
Here we give some basic notions as regards monotonic maps in a plane.
We define a partial order on (the so-called southeast ordering) so that the positive cone is the fourth quadrant, i.e., this partial order is defined by
Similarly, we define northeast ordering as
A map F is called competitive if it is non-decreasing with respect to , that is, if the following holds:
For each , define for to be the usual four quadrants based at v and numbered in a counterclock-wise direction, e.g., .
For let denote the interior of S.
The following definition is from [35].
Definition 1 Let R be a nonempty subset of . A competitive map is said to satisfy condition (O+) if for every x, y in R, implies , and T is said to satisfy condition (O−) if for every x, y in R, implies .
The following theorem was proved by de Mottoni-Schiaffino [38] for the Poincaré map of a periodic competitive Lotka-Volterra system of differential equations. Smith generalized the proof to competitive and cooperative maps [34, 39].
Theorem 4 Let R be a nonempty subset of . If T is a competitive map for which (O+) holds then for all , is eventually component-wise monotone. If the orbit of x has compact closure, then it converges to a fixed point of T. If instead (O−) holds, then for all , is eventually component-wise monotone. If the orbit of x has compact closure in R, then its omega limit set is either a period-two orbit or a fixed point.
It is well known that a stable period-two orbit and a stable fixed point may coexist; see Hess [40].
A non-hyperbolic equilibrium point E of a competitive or cooperative map T is called non-hyperbolic point of stable type (resp. of unstable type) if the second characteristic value of the Jacobian matrix is in interval (resp. outside of interval ).
The following result is from [35], with the domain of the map specialized to be the Cartesian product of intervals of real numbers. It gives a sufficient condition for conditions (O+) and (O−).
Theorem 5 Let be the Cartesian product of two intervals in ℝ. Let be a competitive map. If T is injective and for all then T satisfies (O+). If T is injective and for all then T satisfies (O−).
Theorems 4 and 5 are quite applicable as we have shown in [41], in the case of competitive systems in the plane consisting of linear fractional equations.
The following result is from [13], which generalizes the corresponding result for hyperbolic case from [30]. Related results have been obtained by Smith in [34].
Theorem 6 Let ℛ be a rectangular subset of and let T be a competitive map on ℛ. Let be a fixed point of T such that has nonempty interior (i.e., is not the NW or SE vertex of ℛ).
Suppose that the following statements are true.
-
(a)
The map T is strongly competitive on .
-
(b)
T is on a relative neighborhood of .
-
(c)
The Jacobian of T at has real eigenvalues λ, μ such that , where λ is stable and the eigenspace associated with λ is not a coordinate axis.
-
(d)
Either and
or and
Then there exists a curve in ℛ such that:
-
(i)
is invariant and a subset of .
-
(ii)
The endpoints of lie on .
-
(iii)
.
-
(iv)
the graph of a strictly increasing continuous function of the first variable.
-
(v)
is differentiable at if or one sided differentiable if , and in all cases is tangential to at .
-
(vi)
separates ℛ into two connected components, namely
and
-
(vii)
is invariant, and as for every .
-
(viii)
is invariant, and as for every .
The next results from [42] give the existence and uniqueness of invariant curves emanating from a non-hyperbolic point of unstable type, that is, a non-hyperbolic point where the second eigenvalue is outside the interval . See also [43].
Theorem 7 Let , and let be a strongly competitive map with a unique fixed point , and such that T is continuously differentiable in a neighborhood of . Assume further that at the point the map T has associated characteristic values μ and ν satisfying and .
Then there exist curves , in ℛ and there exist with such that:
-
(i)
For , is invariant, northeast strongly linearly ordered, such that and ; the endpoints , of , where , belong to the boundary of ℛ. For with , is a subset of the closure of one of the components of . Both and are tangential at to the eigenspace associated with ν.
-
(ii)
For , let be the component of whose closure contains . Then is invariant. Also, for , accumulates on , and for , accumulates on .
-
(iii)
Let and . Then is invariant.
Corollary 1 Let a map T with fixed point be as in Theorem 7. Let , be the sets as in Theorem 7. If T satisfies (O+), then for , is invariant, and for every , the iterates converge to or to a point of . If T satisfies (O−), then and . For every , the iterates either converge to , or converge to a period-two point, or to a point of .
3 Main results
The main results of this paper depend on the number of interior equilibrium points of system (6). So first we give the explicit algebraic conditions in terms of the parameters for system (6) to have zero-five interior equilibrium points. Next, we present the local stability analysis of the equilibrium points and then the results on the global dynamics. It is interesting to note that the local stability analysis is the most difficult part of our analysis.
3.1 Equilibrium points
The equilibrium points of system (6) satisfy the following system of equations:
All solutions of system (11) with at least one zero component are given as , where , where , where , and where . exists in all cases. and exist when and , respectively. and exist when and , respectively.
The equilibrium points with strictly positive coordinates satisfy the following system of equations:
From (12) one can see that all positive solutions of system (12) satisfy the quartic equation:
Lemma 1 Let
and
Then the following holds:
-
(a)
If , , and , then (13) has four simple real roots.
-
(b)
If and then (13) has no real roots.
-
(c)
If then (13) has two simple real roots.
-
(d)
If and then (13) has one real double root.
-
(e)
If and then (13) has two real simple roots and one real double root.
-
(f)
If , and then (13) has two real double roots.
-
(g)
If , and then (13) has no real roots.
-
(h)
If , and then (13) has one real root of multiplicity four.
Proof The discrimination matrix [44] of and is given by
where
Let denote the determinant of the submatrix of , formed by the first 2k rows and the first 2k columns, for . So, by straightforward calculation one can see that , , , and . The rest of the proof follows in view of [[44], Theorem 1]. □
3.2 Local stability of equilibrium points
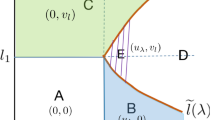
Geometrically the solutions of system (12) are intersections of two orthogonal parabolas that satisfy the equations
with respective vertices and . See Figure 2.

Equilibrium curves.
Consequently when and , in addition to the five equilibrium points on the axes, system (6) may have one, two, three or four positive equilibrium points. We will refer to these equilibrium points as (southwest), (southeast), (northwest), and (northeast) where
When a positive equilibrium point is non-hyperbolic we will refer to it as .
The map associated with system (6) has the form
The Jacobian matrix of T is
The Jacobian matrix of T evaluated at an equilibrium with positive coordinates has the form
The determinant and trace of (19) are
It is worth noting that and of (19) are both positive.
Using the equilibrium condition (12), we may rewrite the determinant and trace as
We will use both (20) and (21) in our proofs to follow.
The characteristic equation of the matrix (19) is
of which the solutions are the eigenvalues
The eigenvalues of (19) are therefore
with corresponding eigenvectors
Using the equilibrium condition (12), we may rewrite the eigenvalues and eigenvectors as
We will now consider two lemmas that will be used to prove the local stability character of the positive equilibrium points of system (6). The nonzero coordinates, , of all equilibrium points will subsequently be designated with the subscripts: r (repeller), a (attractor), s, , (saddle point), , (non-hyperbolic of the stable type), and nu (non-hyperbolic of the unstable type).
Lemma 2 The following conditions hold for the coordinates of the positive equilibrium points, , of system (6).
-
(i)
For
(28) -
(ii)
For ,
(29) -
(iii)
For ,
(30) -
(iv)
For ,
(31) -
(v)
For and ,
(32) -
(vi)
For ,
(33)
Proof This is clear from the geometry. See Figure 3. □

Local stability.
Lemma 3 The following conditions hold for the coordinates of the positive equilibrium points, , of system (6).
-
(i)
For and ,
(34) -
(ii)
For and ,
(35) -
(iii)
For , , and ,
(36)
Proof (i) Let be the slope of the tangent line to parabola at and let be the slope of the tangent line to parabola at . It is clear from the geometry that
See Figure 3. It follows that
and in turn
Therefore
The proofs for cases (ii) and (iii) are similar and will be omitted. □
Theorem 8 The following conditions hold for the equilibrium points of system (6).
-
(i)
is locally asymptotically stable.
-
(ii)
and are non-hyperbolic of the stable type.
-
(iii)
is locally asymptotically stable and is a saddle point.
-
(iv)
is locally asymptotically stable and is a saddle point.
-
(v)
is a repeller.
-
(vi)
and are saddle points.
-
(vii)
is locally asymptotically stable.
-
(viii)
and are non-hyperbolic of the stable type.
-
(ix)
is non-hyperbolic of the unstable type.
Proof
-
(i)
The eigenvalues of (18), evaluated at , are and .
-
(ii)
The eigenvalues of (18), evaluated at , are and when . The eigenvalues of (18), evaluated at , are and when .
-
(iii)
The eigenvalues of (18), evaluated at and , respectively, are and when .
-
(a)
Note that when ,
-
(b)
Note that when ,
It can be shown that
Therefore,
In both cases, the conclusion follows.
-
(a)
-
(iv)
The eigenvalues of (18), evaluated at and , respectively, are and when .
The proof of (iv) is similar to the proof of (iii) and will be omitted.
-
(v)
We need to show that and when . Since and are both positive, our conditions become and . We will first show that . By (34) we have
By (28) we have
Therefore . We will next show that . By (34) we have
Therefore .
-
(vi)
We need to show that when . Since and are both positive, our condition becomes . By (34) we have
Therefore . The proof that is a saddle point is similar and will be omitted.
-
(vii)
We need to show that and when . Since and are both positive, our conditions become and . We will first show that . By (35) we have
By (30) we have
By (30) again we have
Therefore . We will next show that .
By (35) we have
Therefore .
-
(viii)
By (26) and (36), we have
By (32), we have . The conclusion follows.
-
(ix)
The proof of (ix) is similar to the proof of (viii) and will be omitted. □
3.3 Global results
In this section we combine the results from Sections 2 and 3.2 to prove the global results for system (6). First, we prove that the map T which corresponds to system (6) is injective and it satisfies (O+).
Theorem 9 The map T which corresponds to system (6) is injective.
Proof Indeed,
which is equivalent to
Now we will prove that , which immediately implies .
First, assume . Then and which in view of (37) implies . In view of (38), , that is, , which implies and and in view of (37) we obtain , which is a contradiction.
Second, assume . Then , which implies and and , which is equivalent to and . In view of (37) we obtain , which is a contradiction.
Thus and T is injective. □
Theorem 10 The map T which corresponds to system (6) satisfies (O+). All solutions of system (6) converge to an equilibrium point.
Proof Assume that
The last inequality is equivalent to
First we prove that . Otherwise .
Then
which implies , which is equivalent to and implies , which in turn implies , which contradicts (39). Consequently .
Next we prove that . Otherwise .
Then , which implies , which is impossible in view of .
Thus .
Thus we conclude that all solutions of (6) are eventually monotonic for all values of parameters. Furthermore it is clear that all solutions are bounded. Indeed every solution of (6) satisfies
Consequently, all solutions converge to an equilibrium point. □
Theorem 11 Assume that and . Then the zero equilibrium of (6) is globally asymptotically stable.
Proof It follows immediately from Theorem 10. □
Theorem 12
-
(a)
If , , then system (6) has two equilibrium points, , , where is locally asymptotically stable and is non-hyperbolic of the stable type. The basins of attraction of the two equilibrium points are given as
where denotes the global stable manifold guaranteed by Theorem 6.
-
(b)
Similarly, if , , the basins of attraction of the equilibrium points are given as
Proof We will present the proof of (a) since the proof of (b) uses analogous arguments. Local stability of the equilibrium points follows from Theorem 8. Furthermore, the existence of the stable manifold follows from Theorem 6. By immediate checking one can see that if then as and if then as . Let be an arbitrary point below . Then where denotes the y coordinate of the point on . Consequently , which in view of and as implies that as .
Let be an arbitrary point above . If , then where denotes the y coordinate of the point on . Consequently, , which in view of and as implies that , as . Thus as . If , then , which implies , which in view of and as implies that as .
Another proof of this result follows from Theorem 6, which guarantees the existence and uniqueness of and the invariance of the regions below and above and Theorem 10, which guarantees that all solutions converge to an equilibrium point. □
Theorem 13
-
(a)
If , , then system (6) has three equilibrium points, , , , where the first two are locally stable and the third is a saddle point. The basins of attraction of the three equilibrium points are given as
where denotes the global stable manifold guaranteed by Theorem 6.
-
(b)
Similarly, if , , the basins of attraction of the equilibrium points are given as
-
(c)
If , then system (6) has three equilibrium points, , , , where is locally stable and the remaining two are non-hyperbolic of stable type. The basins of attraction of three equilibrium points are given as
where denotes corresponding global stable manifold.
Proof We present the proof in case (a) only. The proof in case (b) is similar.
Local stability of the equilibrium points follows from Theorem 8.
In view of Theorem 10 all solutions converge to an equilibrium solution. Furthermore, all conditions of Theorem 6 are satisfied, which guarantee the existence of the manifold , which is the graph of a continuous increasing function and such that both regions, below and above it are invariant. In addition the basin of attraction of is exactly . Thus, both regions, below and above are invariant and contain exactly one equilibrium point and all solutions there are convergent. Consequently the conclusion of the theorem follows.
Let us consider case (c). The existence and the properties of the manifolds and , as well as the invariance of the regions above , between and and below is guaranteed by Theorem 6. Since the regions above and below contains only one equilibrium point in view of Theorem 10 all solutions that start in those regions converge to and , respectively.
Now, let be an arbitrary point between and . First assume that , . Then which implies . In view of , as we conclude that as . Next assume that , is not satisfied. Then there exist points , such that which implies . Since , as we conclude that eventually enters the ordered interval . Since the map T is strongly competitive it will eventually enter the interior of and then, as we just showed, will converge to . □
See Figure 4 for visual illustration of Theorems 11-13.

Global stability and basins of attraction of system ( 6 ) in cases of one, two, and three equilibrium points.
Theorem 14
-
(a)
If , , then system (6) has four equilibrium points, , , , , where the first two are locally asymptotically stable, the third is a saddle point and the fourth is non-hyperbolic of the stable type. The basins of attraction of the four equilibrium points are given as
where denotes the global stable manifold guaranteed by Theorem 6.
-
(b)
Similarly, if , , then system (6) has four equilibrium points , , , , where the first two are locally asymptotically stable, the third is a saddle point and the fourth one is non-hyperbolic of the stable type. The basins of attraction are given as
Proof We present the proof in case (a) only. The proof in case (b) is similar. Local stability of the equilibrium points follows from Theorem 8. The proof for the basin of attraction is identical to the proof of the corresponding part of Theorem 12. Let be an arbitrary point below . Then where denotes the y coordinate of the point on . Consequently , which in view of and as implies that as . We also used the fact that the stable manifold is unique and represents the basin of attraction of the point .
Finally, let be an arbitrary point between and . First assume that , . Then which implies . In view of , as we conclude that as . Next assume that , is not satisfied. Then there exist points , such that which implies . Since , as we conclude that eventually enters the ordered interval . Since the map T is strongly competitive it will eventually enters the interior of and then, as we just showed, will converge to . □
Theorem 15 Assume that , and that system (6) has five equilibrium points. Three of these equilibrium points are locally asymptotically stable, , , , and two are saddle points, , .
The basins of attraction of the equilibrium points are given as
The basins of attraction of the saddle equilibrium points E are the corresponding stable manifolds .
Proof Local stability of the equilibrium points follows from Theorem 8. Furthermore, the existence of the stable manifolds and with the mentioned properties follows in the same way as in Theorem 13. The three regions , , are invariant by Theorem 6 and in view of Theorem 10 every solution converges to an equilibrium point. Since the equilibrium points , , are locally asymptotically stable and , are saddle points, the result follows. □
Theorem 16 Assume that , and that system (6) has six equilibrium points. Three of these equilibrium points are locally asymptotically stable, , , , two are saddle points, , , and one interior point, , is non-hyperbolic of the unstable type. There exist two invariant curves and emanating from which are graphs of continuous non-decreasing functions such that is above .
The basins of attraction of the equilibrium points are given as
The basins of attraction of the saddle equilibrium points and are the corresponding stable manifolds and , respectively.
Proof Local stability of the equilibrium points follows from Theorem 8. Furthermore, the existence of the stable manifolds and with the mentioned properties follows from Theorem 6. The region is invariant by Theorem 6 and in view of Theorem 10 every solution which starts in that region converges to . The existence and the properties of the curves and follow from Corollary 1. Thus the regions and are both invariant and so by Theorem 10 every solution which starts in those regions converges to and , respectively, since these equilibrium points are locally asymptotically stable. Finally, the set is invariant by Theorem 7 and by Theorem 10 every solution which starts in that region converges to . □
Conjecture 1 Based on our numerical experiments we believe that in Theorem 16 holds.
Theorem 17 Assume that , and that system (6) has seven equilibrium points. Three of these equilibrium points are locally asymptotically stable, , , , three are saddle points, , , or , and one is a repeller, .
The basins of attraction of the equilibrium points are given as
The basins of attraction of the saddle equilibrium points E are the corresponding stable manifolds .
Proof Local stability of all equilibrium points , , follows from Theorem 8.
Three regions , , are invariant by Theorem 6 and in view of Theorem 10 every solution converges to an equilibrium. Since the equilibrium points , , are locally asymptotically stable and , , or are saddle points, the result follows. □
See Figure 5 for visual illustration of Theorems 14-17.

Global stability and basins of attraction of system ( 6 ) in cases of four, five, six and seven equilibrium points.
Theorem 18 Assume that , and that system (6) has eight equilibrium points. Three of these equilibrium points are locally asymptotically stable, , , , three are saddle points, , , or , one is a repeller, , and one is non-hyperbolic of the stable type .
The basins of attraction of the equilibrium points are given as
The basins of attraction of the saddle equilibrium points E are the corresponding stable manifolds .
The same result holds if is replaced with .
Proof Local stability of the equilibrium points follows from Theorem 8. The existence and the properties of four manifolds , , , follow from Theorem 6.
The four regions , , , are invariant by Theorem 6 and in view of Theorem 10 every solution converges to an equilibrium point. Since the equilibrium points , , are locally asymptotically stable, is non-hyperbolic of stable type and , , are saddle points, the result follows. □
Theorem 19 Assume that , and that system (6) has nine equilibrium points. Four of these equilibrium points are locally asymptotically stable, , , , , four are saddle points, , , , , and one is a repeller, .
The basins of attraction of the equilibrium points are given as
The basins of attraction of the saddle equilibrium points E are the corresponding stable manifolds .
Proof Local stability of the equilibrium points follows from Theorem 8. The existence and the properties of four manifolds , , , follow from Theorem 6.
The four regions , , , are invariant by Theorem 6 and in view of Theorem 10 every solution converges to an equilibrium point. Since the equilibrium points , , , are locally asymptotically stable and , , , and are saddle points, the result follows. □
See Figure 6 for visual illustration of Theorems 18, 19.

Global stability and basins of attraction of system ( 6 ) in cases of eight and nine equilibrium points.
References
Agarwal RP Monographs and Textbooks in Pure and Applied Mathematics 228. In Difference Equations and Inequalities: Theory, Methods, and Applications. 2nd edition. Dekker, New York; 2000.
Kulenović MRS, Ladas G: Dynamics of Second Order Rational Difference Equations. Chapman & Hall/CRC, Boca Raton; 2001.
Kulenović MRS, Merino O: Discrete Dynamical Systems and Difference Equations with Mathematica. Chapman & Hall/CRC, Boca Raton; 2002.
Thieme HR Princeton Series in Theoretical and Computational Biology. In Mathematics in Population Biology. Princeton University Press, Princeton; 2003.
Allen LJS: An Introduction to Mathematical Biology. Prentice Hall, New York; 2006.
Cushing JM: The Allee effect in age-structured population dynamics. In Mathematical Ecology. Edited by: Hallam TG, Gross LJ, Levin SA. World Scientific, Singapore; 1988:479-505.
Harry AJ, Kent CM, Kocic VL: Global behavior of solutions of a periodically forced sigmoid Beverton-Holt model. J. Biol. Dyn. 2012, 6: 212-234.
Thomson GG: A proposal for a threshold stock size and maximum fishing mortality rate. Canad. Spec. Publ. Fish. Aquat. Sci. 120. In Risk Evaluation and Biological Reference Points for Fisheries Management Edited by: Smith SJ, Hunt JJ, Rivard D. 1993, 303-320.
Basu S, Merino O: On the global behavior of solutions to a planar system of difference equations. Commun. Appl. Nonlinear Anal. 2009, 16: 89-101.
Brett A, Kulenović MRS: Basins of attraction of equilibrium points of monotone difference equations. Sarajevo J. Math. 2009, 5(18)(2):211-233.
Brett A, Kulenović MRS: Basins of attraction for two species competitive model with quadratic terms and the singular Allee effect. Discrete Dyn. Nat. Soc. 2014., 2014: Article ID 847360
Burgić D, Kalabušić S, Kulenović MRS: Nonhyperbolic dynamics for competitive systems in the plane and global period-doubling bifurcations. Adv. Dyn. Syst. Appl. 2008, 3: 229-249.
Kulenović MRS, Merino O: Invariant manifolds for competitive discrete systems in the plane. Int. J. Bifurc. Chaos 2010, 20: 2471-2486. 10.1142/S0218127410027118
Kulenović MRS, Nurkanović M: Asymptotic behavior of two dimensional linear fractional system of difference equations. Rad. Mat. 2002, 11: 59-78.
Kulenović MRS, Nurkanović M: Asymptotic behavior of a competitive system of linear fractional difference equations. Adv. Differ. Equ. 2006., 2006: Article ID 19756
Livadiotis G, Elaydi S: General Allee effect in two-species population biology. J. Biol. Dyn. 2012, 6: 959-973. 10.1080/17513758.2012.700075
Livadiotis G, Assas L, Elaydi S, Kwessi E, Ribble D: Competition models with Allee effects. J. Differ. Equ. Appl. 2014, 20: 1127-1151. 10.1080/10236198.2014.897341
Chow Y, Jang S: Multiple attractors in a Leslie-Gower competition system with Allee effects. J. Differ. Equ. Appl. 2014, 20: 169-187. 10.1080/10236198.2013.815166
Cushing JM, Levarge S, Chitnis N, Henson SM: Some discrete competition models and the competitive exclusion principle. J. Differ. Equ. Appl. 2004, 10: 1139-1152. 10.1080/10236190410001652739
Clark D, Kulenović MRS, Selgrade JF: Global asymptotic behavior of a two-dimensional difference equation modelling competition. Nonlinear Anal. TMA 2003, 52: 1765-1776. 10.1016/S0362-546X(02)00294-8
Franke JE, Yakubu A-A: Mutual exclusion versus coexistence for discrete competitive systems. J. Math. Biol. 1991, 30: 161-168. 10.1007/BF00160333
Franke JE, Yakubu A-A: Global attractors in competitive systems. Nonlinear Anal. TMA 1991, 16: 111-129. 10.1016/0362-546X(91)90163-U
Franke JE, Yakubu A-A: Geometry of exclusion principles in discrete systems. J. Math. Anal. Appl. 1992, 168: 385-400. 10.1016/0022-247X(92)90167-C
Hassell MP, Comins HN: Discrete time models for two-species competition. Theor. Popul. Biol. 1976, 9: 202-221. 10.1016/0040-5809(76)90045-9
Hirsch M, Smith H: Monotone dynamical systems. II. In Handbook of Differential Equations: Ordinary Differential Equations. Elsevier, Amsterdam; 2005:239-357.
Hirsch M, Smith HL: Monotone maps: a review. J. Differ. Equ. Appl. 2005, 11: 379-398. 10.1080/10236190412331335445
Jiang H, Rogers TD: The discrete dynamics of symmetric competition in the plane. J. Math. Biol. 1987, 25: 573-596. 10.1007/BF00275495
Krawcewicz W, Rogers TD: Perfect harmony: the discrete dynamics of cooperation. J. Math. Biol. 1990, 28: 383-410.
Kulenović MRS, Merino O: Competitive-exclusion versus competitive-coexistence for systems in the plane. Discrete Contin. Dyn. Syst., Ser. B 2006, 6: 1141-1156.
Kulenović MRS, Merino O: Global bifurcation for competitive systems in the plane. Discrete Contin. Dyn. Syst., Ser. B 2009, 12: 133-149.
Kulenović MRS, Nurkanović M: Global asymptotic behavior of a two dimensional system of difference equations modelling cooperation. J. Differ. Equ. Appl. 2003, 9: 149-159. 10.1080/10236100309487541
Kulenović MRS, Nurkanović M: Asymptotic behavior of a linear fractional system of difference equations. J. Inequal. Appl. 2005, 2005: 127-144.
May RM: Stability and Complexity in Model Ecosystems. Princeton University Press, Princeton; 2001.
Smith HL: Periodic competitive differential equations and the discrete dynamics of competitive maps. J. Differ. Equ. 1986, 64: 165-194. 10.1016/0022-0396(86)90086-0
Smith HL: Planar competitive and cooperative difference equations. J. Differ. Equ. Appl. 1998, 3: 335-357. 10.1080/10236199708808108
Yakubu A-A: The effect of planting and harvesting on endangered species in discrete competitive systems. Math. Biosci. 1995, 126: 1-20. 10.1016/0025-5564(94)00033-V
Yakubu A-A: A discrete competitive system with planting. J. Differ. Equ. Appl. 1998, 4: 213-214. 10.1080/10236199808808137
de Mottoni P, Schiaffino A: Competition systems with periodic coefficients: a geometric approach. J. Math. Biol. 1981, 11: 319-335. 10.1007/BF00276900
Smith HL: Periodic solutions of periodic competitive and cooperative systems. SIAM J. Math. Anal. 1986, 17: 1289-1318. 10.1137/0517091
Hess P Pitman Research Notes in Mathematics Series 247. In Periodic-Parabolic Boundary Value Problems and Positivity. Longman, Harlow; 1991.
Camouzis E, Kulenović MRS, Merino O, Ladas G: Rational systems in the plane. J. Differ. Equ. Appl. 2009, 15: 303-323. 10.1080/10236190802125264
Kulenović, MRS, Merino, O: Invariant curves of planar competitive and cooperative maps (to appear)
Clark D, Kulenović MRS: On a coupled system of rational difference equations. Comput. Math. Appl. 2002, 43: 849-867. 10.1016/S0898-1221(01)00326-1
Yang L, Hou X, Zeng Z: Complete discrimination system for polynomials. Sci. China Ser. E 1996, 39(6):628-646.
Acknowledgements
The authors are grateful to two anonymous referees for a number of helpful and constructive suggestions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
Each of the authors, AB and MRSK, contributed to each part of this work equally and read and approved the final version of the manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cite this article
Brett, A., Kulenović, M.R. Two species competitive model with the Allee effect. Adv Differ Equ 2014, 307 (2014). https://doi.org/10.1186/1687-1847-2014-307
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2014-307