
Abstract
The split common problems for finding the equilibrium points and fixed points have been studied. A parallel superimposed algorithm is introduced to solve this split common problem. Strong convergence theorems are shown with some analysis techniques.
MSC:49J30, 47H09, 65K10.
Similar content being viewed by others

1 Introduction
In the present article, our main purpose is to study the split problem. First, we recall some relevant background in the literature.
Problem 1: the split feasibility problem
Let C and Q be two nonempty closed convex subsets of Hilbert spaces and , respectively, and let be a bounded linear operator. The problem of finding a point such that
is called the split feasibility; it was first introduced by Censor and Elfving [1] in finite dimensional Hilbert spaces. Such problems arise in the field of intensity-modulated radiation therapy when one attempts to describe physical dose constraints and equivalent uniform dose constraints within a single model. When and are a single pair of sets, Censor and Elfving [1] introduced the simultaneous multi-projections algorithm:
where , , , (), and is the solution of the equation
Note that the simultaneous multi-projections algorithm (1.2) involve a matrix inversion at each iterative step. This is very time-consuming, particularly if the dimensions are large. In order to solve this problem, Byrne [2] derived a new algorithm, called the CQ-algorithm:
where with L being the largest eigenvalue of the matrix , I is the unit matrix or operator, and and denote the orthogonal projections onto C and Q, respectively. The CQ-algorithm and its variant forms have now been studied for the split feasibility problem; see, for instance [3–13].
Problem 2: the split common fixed point problem
If every closed convex subset of a Hilbert space is the fixed point set of its associating projection, then the split feasibility problem becomes a special case of the split common fixed point problem of finding a point with the property:
This problem was first introduced by Censor and Segal [14] who invented an algorithm which generates a sequence according to the iterative procedure:
Moudafi [15] extended (1.4) to the following relaxed algorithm:
where , are relaxation parameters. Consequently, Wang and Xu [16] considered a general cyclic algorithm. Very recently, the split problem has also been extended to solve other problems, such as the split monotone variational inclusions and the split variational inequalities, please refer to [15, 17–22] and [23–25].
Problem 3: the equilibrium problem
Consider the following equilibrium problem: Finding such that
where is a bifunction. We will denote by the set of solutions of (1.5).
The equilibrium problems, in its various forms, found application in optimization problems, fixed point problems, and convex minimization problems; in other words, equilibrium problems are a unified model for problems arising in physics, engineering, economics, and so on (see [26–29]).
Motivated by the split common fixed point problem and the equilibrium problem, He and Du [30] presented the following split equilibrium problem and fixed point problem:
where and are the sets of fixed points of two nonlinear mappings S and T, respectively, and are the solution sets of two equilibrium problems with bifunctions F and G, respectively, and A is a bounded linear mapping. Denote the solution set of (1.6) by
Special cases
-
1.
If and , then (1.6) is reduced to the following split common fixed point problem, which has been considered by many authors, for example, [14, 15, 17] and [21]:
(1.7) -
2.
If and , then (1.7) is reduced to the split feasibility problem (1.1).
-
3.
If S and T are all identity operators, then (1.6) is reduced to the split equilibrium problem which has been considered in [18]:
Based on the work in this direction, in this paper we will develop new algorithms to solve the split equilibrium problem and the fixed point problem (1.6). We first introduce a parallel superimposed algorithm. Consequently, strong convergence theorems are shown with some analysis techniques.
2 Preliminaries
Let H be a real Hilbert space with inner product and norm , respectively. Let C be a nonempty closed convex subset of H.
Definition 2.1 A mapping is called nonexpansive if
for all .
We will use to denote the set of fixed points of T, that is, .
Definition 2.2 A mapping is called contractive if
for all and for some constant . In this case, we call f is a ρ-contraction.
Definition 2.3 A linear bounded operator is called strongly positive if there exists a constant such that
for all .
Definition 2.4 We call the metric projection if for each
It is well known that the metric projection is characterized by
for all , . From this, we can deduce that is firmly nonexpansive, that is,
for all . Hence is also nonexpansive.
It is well known that in a real Hilbert space H, the following two equalities hold:
for all and , and
for all . It follows that
for all .
Throughout this paper, we assume that a bifunction satisfies the following conditions:
-
(H1)
for all ;
-
(H2)
F is monotone, i.e., for all ;
-
(H3)
for each , ;
-
(H4)
for each , is convex and lower semicontinuous.
Lemma 2.5 ([31])
Let C be a nonempty closed convex subset of a real Hilbert space H. Let be a bifunction which satisfies conditions (H1)-(H4). Let and . Then there exists such that
Further, if , then the following hold:
-
(i)
is single-valued and is firmly nonexpansive, i.e., for any , ;
-
(ii)
is closed and convex and .
Lemma 2.6 ([32])
Let the mapping be defined as in Lemma 2.5. Then, for and ,
Lemma 2.7 ([33])
Let and be two bounded sequences in a Banach space X and let be a sequence in with . Suppose that
for all and
Then .
Lemma 2.8 ([34])
Let C be a closed convex subset of a real Hilbert space H and let be a nonexpansive mapping. Then the mapping is demiclosed. That is, if is a sequence in C such that weakly and strongly, then .
Lemma 2.9 ([35])
Assume that is a sequence of nonnegative real numbers such that
where is a sequence in and is a sequence such that
-
(1)
;
-
(2)
or .
Then .
3 Main results
In this section, we introduce our algorithm and prove our main results.
Let and be two real Hilbert spaces and let C and D be two nonempty closed convex subsets of and , respectively. Let be a bounded linear operator with its adjoint , B be a strongly positive bounded linear operator on with coefficient . Let be a ρ-contraction and and be two bifunctions satisfying the conditions (H1)-(H4). Let and be two nonexpansive mappings.
Algorithm 3.1 Taking arbitrarily, we define a sequence by the following:
for all , where and are two real number sequences in , and are two constants and and are two real number sequences in .
Theorem 3.2 Suppose and suppose the following conditions hold:
-
(C1):
and ;
-
(C2):
;
-
(C3):
and ;
-
(C4):
and ;
-
(C5):
.
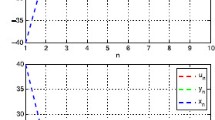
Then the sequence generated by algorithm (3.1) converges strongly to , which solves the following VI:
Proof First, we know that the solution of (3.2) is unique. We denote the unique solution by p. That is, . Then we have and . Set , and for all . Then . From Lemma 2.5, we know that and are firmly nonexpansive. By these facts, we have the following conclusions:
and
Applying Lemma 2.6, we deduce
and
From (3.1), we have
Using (2.3), we get
Since A is a linear operator with its adjoint , we have
Again from (2.3), we obtain
From (3.5), (3.10), and (3.11), we have
Substituting (3.12) into (3.9) to deduce
It follows that
Thus, from (3.8), we get
The boundedness of the sequence follows.
Next, we estimate . Observe that
Since , we derive by virtue of (3.7) and (3.13) that
According to (3.6) and (3.14), we have
where is a constant such that
Therefore,
From (3.1), we write where for all . Then we have
Noting the condition (C1) and the boundedness of the sequences , , , , , and , we have
By Lemma 2.7, we deduce
Hence,
Since , we obtain
Thus,
Using the firmly nonexpansiveness of , we have
Applying (2.4) to (3.1) to deduce
It follows from (3.19) that
Then
This together with (C1), (3.17), and (3.18) implies that
From (3.20), we have
Hence,
which implies that
So,
Note that
Therefore,
From (3.18), (3.22), and (3.24), we get
Now, we show that . Choose a subsequence of such that
Since the sequence is bounded, we can choose a subsequence of such that . For the sake of convenience, we assume (without loss of generality) that . Consequently, we derive from the above conclusions that
By the demi-closed principle of the nonexpansive mappings S and T (see Lemma 2.8), we deduce and (according to (3.25) and (3.23), respectively).
Next, we show that . Since , we have
It follows from the monotonicity of F that
and hence
Since , , and , we obtain . It follows that . For t with and , let . It follows that . So,
Therefore, . Thus . This implies that . Similarly, we can prove that . To this end, we deduce and . That is to say, . Therefore,
Finally, we prove . From (3.1), we have
It follows that
Applying Lemma 2.9 and (3.32) to (3.34), we deduce . The proof is completed. □
Algorithm 3.3 Taking arbitrarily, we define a sequence by the following:
for all , where and are two constants and and are two real number sequences in .
Corollary 3.4 Suppose and suppose the following conditions hold:
-
(C1):
and ;
-
(C2):
;
-
(C3):
.
Then the sequence generated by algorithm (3.35) converges strongly to , which solves the following VI:
Algorithm 3.5 Taking arbitrarily, we define a sequence by the following:
for all , where and are two real number sequences in , and are two constants and and are two real number sequences in .
Corollary 3.6 Suppose and suppose the following conditions hold:
-
(C1):
and ;
-
(C2):
;
-
(C3):
and ;
-
(C4):
and ;
-
(C5):
.
Then the sequence generated by algorithm (3.36) converges strongly to , which solves the following VI:
Algorithm 3.7 Taking arbitrarily, we define a sequence by the following:
for all , where and are two constants and and are two real number sequences in .
Corollary 3.8 Suppose and suppose the following conditions hold:
-
(C1):
and ;
-
(C2):
;
-
(C3):
.
Then the sequence generated by algorithm (3.37) converges strongly to , which solves the following VI:
References
Censor Y, Elfving T: A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 1994, 8: 221-239. 10.1007/BF02142692
Byrne C: Iterative oblique projection onto convex subsets and the split feasibility problem. Inverse Probl. 2002, 18: 441-453. 10.1088/0266-5611/18/2/310
Ceng LC, Ansari QH, Yao JC: An extragradient method for split feasibility and fixed point problems. Comput. Math. Appl. 2012, 64: 633-642. 10.1016/j.camwa.2011.12.074
Dang Y, Gao Y: The strong convergence of a KM-CQ-like algorithm for a split feasibility problem. Inverse Probl. 2011., 27: Article ID 015007
Wang F, Xu HK: Approximating curve and strong convergence of the CQ algorithm for the split feasibility problem. J. Inequal. Appl. 2010., 2010: Article ID 102085 10.1155/2010/102085
Xu HK: Iterative methods for the split feasibility problem in infinite-dimensional Hilbert spaces. Inverse Probl. 2010., 26: Article ID 105018
Yang Q: The relaxed CQ algorithm solving the split feasibility problem. Inverse Probl. 2004, 20: 1261-1266. 10.1088/0266-5611/20/4/014
Yao Y, Wu J, Liou YC: Regularized methods for the split feasibility problem. Abstr. Appl. Anal. 2012., 2012: Article ID 140679 10.1155/2012/140679
Yao Y, Kim TH, Chebbi S, Xu HK: A modified extragradient method for the split feasibility and fixed point problems. J. Nonlinear Convex Anal. 2012, 13: 383-396.
Zhao J, Yang Q: Several solution methods for the split feasibility problem. Inverse Probl. 2005, 21: 1791-1799. 10.1088/0266-5611/21/5/017
Qu B, Xiu N: A note on the CQ algorithm for the split feasibility problem. Inverse Probl. 2005, 21: 1655-1665. 10.1088/0266-5611/21/5/009
Wang Z, Yang Q, Yang Y: The relaxed inexact projection methods for the split feasibility problem. Appl. Math. Comput. 2010. 10.1016/j.amc.2010.11.058
Ceng LC, Ansari QH, Yao JC: Relaxed extragradient methods for finding minimum-norm solutions of the split feasibility problem. Nonlinear Anal. 2012, 75: 2116-2125. 10.1016/j.na.2011.10.012
Censor Y, Segal A: The split common fixed point problem for directed operators. J. Convex Anal. 2009, 16: 587-600.
Moudafi A: The split common fixed-point problem for demi-contractive mappings. Inverse Probl. 2010, 26: 587-600.
Wang F, Xu HK: Cyclic algorithms for split feasibility problems in Hilbert spaces. Nonlinear Anal. 2011, 74: 4105-4111. 10.1016/j.na.2011.03.044
Moudafi A: A note on the split common fixed-point problem for quasi-nonexpansive operators. Nonlinear Anal. 2011, 74: 4083-4087. 10.1016/j.na.2011.03.041
He ZH: The split equilibrium problems and its convergence algorithms. J. Inequal. Appl. 2012., 2012: Article ID 162
He ZH, Du WS: Nonlinear algorithms approach to split common solution problems. Fixed Point Theory Appl. 2012., 2012: Article ID 130
Moudafi A: Split monotone variational inclusions. J. Optim. Theory Appl. 2011, 150: 275-283. 10.1007/s10957-011-9814-6
Byrne C, Censor Y, Gibali A, Reich S: The split common null point problem. J. Nonlinear Convex Anal. 2012, 13: 759-775.
Censor Y, Gibali A, Reich S: Algorithms for the split variational inequality problem. Numer. Algorithms 2012, 59: 301-323. 10.1007/s11075-011-9490-5
Yao Y, Marino G, Muglia L: A modified Korpelevich’s method convergent to the minimum norm solution of a variational inequality. Optimization 2014, 63: 559-569. 10.1080/02331934.2012.674947
Yao Y, Marino G, Xu HK, Liou YC: Construction of minimum norm fixed points of pseudocontractions in Hilbert spaces. J. Inequal. Appl. 2014., 2014: Article ID 206
Chang SS, Wang L, Tang YK, Yang L: The split common fixed point problem for total asymptotically strictly pseudocontractive mappings. J. Appl. Math. 2012., 2012: Article ID 385638
Blum E, Oettli W: From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63: 123-145.
Moudafi A: Weak convergence theorems for nonexpansive mappings and equilibrium problems. J. Nonlinear Convex Anal. 2008, 9: 37-43.
Yao Y, Noor MA, Liou YC: On iterative methods for equilibrium problems. Nonlinear Anal. 2009, 70: 497-507. 10.1016/j.na.2007.12.021
Ceng LC, Al-Homidan S, Ansari QH, Yao JC: An iterative scheme for equilibrium problems and fixed point problems of strict pseudocontraction mappings. J. Comput. Appl. Math. 2009, 223: 967-974. 10.1016/j.cam.2008.03.032
He ZH, Du WS: On hybrid split problem and its nonlinear algorithms. Fixed Point Theory Appl. 2013., 2013: Article ID 47
Combettes PL, Hirstoaga A: Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6: 117-136.
Cianciaruso F, Marino G, Muglia L, Yao Y: A hybrid projection algorithm for finding solutions of mixed equilibrium problem and variational inequality problem. Fixed Point Theory Appl. 2010., 2010: Article ID 383740
Suzuki T: Strong convergence theorems for infinite families of nonexpansive mappings in general Banach spaces. Fixed Point Theory Appl. 2005, 2005: 103-123.
Geobel K, Kirk WA Cambridge Studies in Advanced Mathematics 28. In Topics in Metric Fixed Point Theory. Cambridge University Press, Cambridge; 1990.
Xu HK: Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 2002, 66: 240-256. 10.1112/S0024610702003332
Acknowledgements
Li-Jun Zhu was supported in part by NSFC 61362033 and NZ13087. Yeong-Cheng Liou was supported in part by NSC 101-2628-E-230-001-MY3 and NSC 101-2622-E-230-005-CC3.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
To view a copy of this licence, visit https://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhu, LJ., Yao, Z., Liou, YC. et al. Superimposed algorithms for the split equilibrium problems and fixed point problems. J Inequal Appl 2014, 380 (2014). https://doi.org/10.1186/1029-242X-2014-380
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1029-242X-2014-380