
Abstract
It is well known that when a horizontal layer of fluid is heated from below, a thermal boundary layer of less dense and hot fluid rises up. When this boundary layer becomes unstable, convective motion in the fluid above sets in. Forecasting when instabilities take place is essential. When a salt dissolved in a fluid saturating a porous medium heated from below is considered, simultaneous mass diffusion and thermal diffusion occur. Unlike the diffusion of heat, the diffusion of salt can take place only through the fluid phase, so an additional physical effect has to be considered: the Soret effect, that is the mass flux created by a temperature gradient. In the present paper the onset of convection in a rotating layer of bi-disperse porous medium saturated by a binary fluid mixture, taking into account the Soret effect, is analysed. Linear stability analysis is performed in order to determine the instability thresholds for the onset of convection via a steady state (stationary convection) and via an oscillatory state (oscillatory convection). Nonlinear stability analysis is performed to obtain the global stability threshold with respect to the \(L^2\)-norm.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The onset of thermal convection in horizontal layers of fluids, uniformly heated from below, was studied for the first time by Henri Bénard in 1900 via experiments and, later, was analytically investigated by Lord Rayleigh. In particular, a “threshold phenomenon” was observed: Lord Rayleigh introduced a dimensionless parameter—the Rayleigh number \({\mathcal {R}}\), depending on the physical features of the layer and of the fluid and on the gravity acceleration—and established that the thermal convection arises when \({\mathcal {R}}\) overcomes a certain threshold \({\mathcal {R}}_c\). From a mathematical point of view, the critical value \({\mathcal {R}}_c\) is determined via the instability analysis of the thermal conduction solution. Concerning the linear instability analysis, requiring that all the eigenvalues of the linear operator have negative real part, one can determine a threshold \({\mathcal {R}}_L\) such that condition \({\mathcal {R}}> {\mathcal {R}}_L\) implies instability of the thermal conduction solution and, consequently, the onset of thermal convection. Concerning the nonlinear stability analysis, introducing a suitable norm and choosing properly a Lyapunov functional, one needs to determine the conditions for which this functional is decreasing along the solutions of the nonlinear system, these conditions give rise to the nonlinear threshold \({\mathcal {R}}_N(\le {\mathcal {R}}_L)\) such that the condition \({\mathcal {R}}<{\mathcal {R}}_N\) implies stability, i.e. if \({\mathcal {R}}<{\mathcal {R}}_N\) convection cannot occur. In order to have useful results for the applications, the challenge is to find a norm for which \({\mathcal {R}}_N={\mathcal {R}}_L\). Furthermore, in many applications, the thermal convection can arise via steady or oscillatory motions and convection is named steady or oscillatory convection, respectively.
The determination of the critical value \({\mathcal {R}}_c\) is a challenging task that attracted the interest of many researchers—in the past as nowadays—due to the many phenomena of the real world involving thermal convection in either clear fluids (see [1,2,3,4] and the references therein) or in fluids saturating porous media (materials composed of a solid skeleton containing interconnected voids through which a fluid can flow). The onset of convection in porous media was widely studied in the literature taking into account various effects, such as uniform rotation of the layer [5,6,7], the influence of an external transverse magnetic field on an electrically conducting fluid [8,9,10,11,12,13], the presence of nanoparticles in the saturating fluid [14, 15] or the presence of one or more chemicals dissolved in the fluid [16,17,18,19], the combined effects of uniform rotation and the presence of a chemical [20,21,22]. Recently, the attention of many scientists is moving toward bi-disperse porous media.
Definition 1.1
A bi-disperse porous medium (BDPM) is a double porosity material composed of clusters of large particles that are agglomerations of small particles and the solid matrix is characterized by two types of pores: There are macropores between the clusters and micropores within them, the macropores are referred to as f-phase (meaning “fractured phase”), while the remainder of the structure is referred to as p-phase (meaning “porous phase”) [23, 24].
In the following, we will denote by \(\varphi\) the porosity associated with the macropores—the ratio of the volume of the macropores to the total volume—and by \(\epsilon\) the porosity associated to the micropores—the ratio of the volume of the micropores to the volume of the porous body which remains once the macropores are removed. The earliest refined model describing the onset of convection in a bi-disperse porous medium is attributable to Nield and Kuznetsov in [24,25,26], in those papers the authors introduced a mathematical model which employs different velocities \(\mathbf{v}^f\) and \(\mathbf{v}^p\) in the macropores and in the micropores, different pressures \(p^f\) and \(p^p\) and different temperatures \(T^f\) and \(T^p\).
Through numerical simulations applied to a bi-disperse porous medium consisting of blocks of porous material which are themselves composed of smaller microblocks, Imani and Hooman in [27] showed that, when the macropores are relatively large compared to the micropores, it is possible to assume that the temperature of the solid skeleton matches those of the fluid in the macro- and micropores, so there is local thermal equilibrium. The single temperature model, i.e. with the assumption \(T^f=T^p=T\), may be sufficient to represent many real situations (see for instance [28,29,30], and the governing equations describing the evolutionary behaviour of the thermal conduction solution in a horizontal layer of single temperature BDPM were introduced by Gentile and Straughan in [31]. Dual porosity materials have a large number of practical applications in industrial field (in order to design heat pipes and computer chips [32], to understanding landslides or for the treatment of nuclear waste), in geophysics (the stockpiled pieces of coal are dual porosity media [33], biological and medical field (brain and bones are natural examples of dual porosity materials). Moreover, it was demonstrated by Nield and Kuznetsov in [24] that convection occurs at higher Rayleigh numbers in a dual porosity material with respect to an equivalent single porosity one, so the heat transfer due to the convective fluid motion is delayed, for this reason dual porosity materials are better suited for insulation problems and thermal management problem (such as cooling of data centers). Since bi-disperse porous media offer much more possibilities to design man-made materials then single porosity media [34,35,36], heat transfer problems in a rotating BDPM find many engineering or industrial applications. Rotating bi-disperse porous media were analysed under various assumptions by Capone et al. in [28, 29, 37,38,39,40]: for instance, in [39] Capone et al. analysed the influence of vertical rotation on the onset of convection in a single temperature BDPM, according to Darcy’s law, while [37] deals with the inertia effect on the onset of convection in a horizontal rotating layer of anisotropic bi-disperse porous medium. In particular, while in [39] it was proved the validity of the principle of exchange of stabilities—so convection can arise only via steady motions—and the coincidence between linear instability threshold and nonlinear stability threshold was obtained, in [37], since inertia term and uniform rotation of the layer have been simultaneously taken into account, the onset of convection can set in through stationary or oscillatory motions, and the critical values of the Rayleigh number for the onset of steady and oscillatory convection were determined. To obtain the results even more useful in applications involving, for instance, food and chemical processes, solidification and centrifugal casting of metals, rotating machineries, petroleum industry, biomechanics and geophysical problems, the presence of one or more chemicals (salts) dissolved in the fluid has been largely analysed either in rotating clear fluids [3] or in rotating single porosity media [17, 22]. The analysis of double diffusive convection requires to suppose that there is a salt dissolved in the fluid, so one considers simultaneous temperature and salt gradients, i.e. simultaneous mass diffusion and thermal diffusion in a liquid mixture. From a mathematical point of view, the competing effects of heating from below (that has a destabilizing effect on the conduction solution) and of rotation and salting from below (that both have a stabilizing effect) are challenging to analyse, since rotation and salt concentration give rise to a skewsymmetric part in the linear operator of the governing equations. Double diffusive bi-dispersive convection was studied by Straughan in [41, 42], by Challoob et al. in [43] under generalized boundary conditions, while Badday and Harfash in [33, 44] deal with bi-dispersive double diffusive convection, taking into account chemical reaction effects. However, in the present paper we focus our attention to double diffusive convection in a uniformly rotating single temperature bi-disperse porous material.
Unlike the diffusion of heat, the diffusion of salt can take place only through the fluid phase, so there are two physical effects to consider: the Soret effect, i.e. the mass flux created by a temperature gradient, and the Dufour effect, i.e. the energy flux induced by a concentration gradient, but, according to the experimental results, the Dufour effect plays a minor role in comparison with the Soret effect when a binary liquid mixture saturating a porous medium is considered (see [45] and the references therein).
As defined in [46], the Soret effect, also known as thermodiffusion, is the mass diffusion in a liquid mixture when a temperature gradient exists and is constantly maintained across the multicomponent mixture, causing all species to move. In response to a gradual and continuous migration of all particles from the hot side to the cold side, following the direction of the heat flow, a concentration gradient starts to develop within the mixture, which slows down the migration of the species to the cold side and causes some of the particles to move on the opposite direction. The contrast between thermal and concentration forces causes the rearrangement of the species until the final steady state. Some applications of the Soret effect are optimum oil recovery from hydrocarbon reservoirs, fabrication of semiconductor devices in molten metal and semiconductor mixtures, separation of species such as polymers, manipulation of macromolecules such as DNA [46].
The plan of the article is as follows. In Sect. 2 the mathematical model and the associated perturbation equations are introduced. In Sect. 3 we perform linear instability analysis of the thermal conduction solution and prove that if \(\epsilon _1 Le \le 1\) the strong principle of exchange of stabilities holds. As described in [1], states of marginal stability—which separates the stable state from the unstable one - can be stationary or oscillatory. If the amplitude of a generic perturbation grow (or is damped) aperiodically, the transition from stability to instability takes place via a marginal state via a steady pattern of motions. If the perturbations are characterized by oscillations of increasing (or decreasing) amplitude, instability occurs through oscillatory motions. If instability arises via stationary motions, the principle of exchange of stabilities holds and the instability sets in as stationary secondary flow. If oscillatory motions prevail, then one has overstability. Hence, in Sects. 3.1 and 3.2 we determine the critical Rayleigh numbers for the onset of steady and oscillatory convection, respectively. In Sect. 3.3 some mathematical aspects shared by the stationary and the oscillatory instability thresholds are discussed. In Sect. 4 the differential constraint approach is utilized to derive the global nonlinear instability threshold and we found that there are regions of subcritical instabilities. In Sect. 5 we perform some numerical simulations in order to analyse the behaviour of the instability thresholds with respect to fundamental physical parameters. The paper ends with a concluding section that summarizes all the obtained results.
2 Mathematical model
Let us consider a reference frame Oxyz with fundamental unit vectors \(\mathbf{i},\mathbf{j},\mathbf{k}\) (\(\mathbf{k}\) pointing vertically upward) and a plane layer \(L={\mathbb {R}}^2 \times [0,d]\) of saturated bi-disperse porous medium that is uniformly and simultaneously heated and salted from below and that is filled by an incompressible Newtonian fluid. Furthermore, we confine ourselves to the case of a single temperature bi-disperse porous material, so there is thermal equilibrium between the f-phase and the p-phase, i.e. \(T^f=T^p=T\). The layer L rotates about the vertical axis with constant angular velocity \(\Omega \mathbf{k}\), and hence, Darcy’s model is extended in order to include Coriolis forces in the momentum equations in the macropores and in the micropores. Moreover, a Boussinesq approximation is applied and the density in the buoyancy force has a linear dependence on temperature and concentration:
\(\alpha\) and \(\alpha _C\) being the thermal and chemical expansion coefficients, respectively. The governing equations for the onset of thermal convection in a uniformly rotating bi-disperse porous medium heated and salted from below, taking into account the Soret effect, are (cf. [39, 41]
where \(p^f\) and \(p^p\) are the reduced pressures, i.e.
\(\mathbf{x}=(x,y,z)\), \(\mathbf{v}^s\) = seepage velocity for \(s=\{f,p\}\), T = temperature field, C = concentration field, \(\zeta\) = interaction coefficient between the f-phase and the p-phase, \(\mathbf{g}=-g \mathbf{k}\) = gravity, \(\mu\) = fluid viscosity, \(\varrho _F\) = reference constant density, \(K_s\) = permeability for \(s=\{f,p\}\), c = specific heat, \(k_m\) = thermal conductivity, \(k_s\) = thermal conductivity for \(s=\{f,p\}\), \(k^s_C\) = salt diffusivity for \(s=\{f,p\}\), \(S=\varphi S_T^f + \epsilon (1-\varphi ) S_T^p\), \(S_T^s\) = Soret coefficient for \(s=\{f,p\}\),
where the subscript sol is referred to the solid skeleton. Let us point out that in the case of single temperature BDPM, since macropores and micropores are saturated by the same fluid, we expect that [47] \((\varrho c)_f=(\varrho c)_p=(\varrho c)_F\), hence \((\varrho c)_m=(1-\varphi )(1-\epsilon )(\varrho c)_{sol}+[\varphi +\epsilon (1-\varphi )](\varrho c)_F\). The boundary conditions associated with (1) are
where \(\mathbf{n}\) is the unit outward normal to the impermeable horizontal planes delimiting the layer. Moreover, since the layer of BDPM is heated and salted from below, we assume \(T_L>T_U\) and \(C_L>C_U\). System (1)–(2) admits the stationary conduction solution
where \(\beta =\dfrac{T_L-T_U}{d}\) is the temperature gradient, \(\beta _C=\dfrac{C_L-C_U}{d}\) is the concentration gradient and \({\bar{p}}^s(0)\) are assigned constants, for \(s=\{f,p\}\). Introducing a perturbation \(\{ \mathbf{u}^f, \mathbf{u}^p, \theta , \gamma , \pi ^f, \pi ^p \}\) to the steady solution, with \(\mathbf{u}^f=(u^f,v^f,w^f)\) and \(\mathbf{u}^p=(u^p,v^p,w^p)\), the arising perturbation equations are
Let us introduce the following non-dimensional parameters:
where the scales are given by
and let us define the Lewis number Le, the non-dimensional Soret number \({\mathcal {S}}\), the Taylor number \({\mathcal {T}}\), the Rayleigh number \({\mathcal {R}}\) and the Rayleigh number for the salt field \({\mathcal {C}}\), respectively, given by
The dimensionless equations describing the evolutionary behaviour of the perturbation fields, dropping all the asterisks, are
The initial conditions and the boundary conditions appended to system 4 are
with \(\nabla \cdot \mathbf{u}^s_0=0\), for \(s=\{f,p\}\), and
respectively.
Remark 2.1
With the aim to perform the stability analysis of the conduction solution to system (1)–(2), so of the null solution to (4)–(5), let us denote by
the periodicity cell, let us assume that \(\forall f \in \{\nabla \pi ^s,u^s,v^s,w^s,\theta ,\gamma \}\) for \(s=\{f,p\}\), \(f \in W^{2,2}(V) \ \forall t \in {\mathbb {R}}^{+}\), and that f is a periodic function in the x and y directions of period \(2 \pi / l\) and \(2 \pi / m\), respectively.
3 Linear instability analysis
In order to study the linear instability of the thermal conduction solution, let us consider the linear version of system (4) and seek for a solution \(\mathbf{u}^f, \mathbf{u}^p, \pi ^f, \pi ^p, \theta , \gamma\) with time dependence like \(e^{\sigma t}\), with \(\sigma \in {\mathbb {C}}\), so we get
Setting
and taking the third component of curl of (6)\(_1\) and (6)\(_2\), we get
i.e.
where \(\Gamma =\xi +\xi K_r+K_r\). Now, substituting the derivative with respect to z of (8) in the third component of double curl of (6)\(_1\) and (6)\(_2\), that is
where \(\Delta _1=\partial ^2/\partial x^2 + \partial ^2/\partial y^2\) is the horizontal Laplacian, we finally get the following boundary value problem in \(w^f, w^p, \theta , \gamma\)
According to boundary conditions (5) and to the periodicity of the perturbations fields, being \(\{ \sin (n \pi z) \}_{n \in {\mathbb {N}}}\) a complete orthogonal system for \(L^2([0,1])\), we employ normal modes solutions in (10):
where \(W^f_{0n}, W^p_{0n}, \Theta _{0n}, \Gamma _{0n}\) are real constants. Consequently we get
\(a^2=l^2+m^2\) being the wavenumber and \(\Lambda _n=n^2 \pi ^2+a^2\). Setting
and requiring the determinant of (12) to be zero, we obtain
hence
Theorem 3.1
Condition \(\epsilon _1 \mathrm{Le} \le 1\) implies the validity of the strong form of the Principle of exchange of stabilities and, in this case, convection can arise only via stationary motions.
Proof
Both roots of (13) are real if
i.e.
that is surely satisfied if \(\epsilon _1 \mathrm{Le} \le 1\), since
are positive. Therefore
\(\hfill\square\)
3.1 Steady convection threshold
When convective instability occurs via steady motions, the marginal state is characterized by \(\sigma =0\), so from (14) we derive the critical Rayleigh number for the onset of stationary convection:
where \({\mathcal {A}}=\eta ^2(\xi +1)^2+2 \eta \xi ^2 + (\xi +K_r)^2\). The minimum with respect to \(n \in {\mathbb {N}}\) is attained at \(n=1\), so the steady critical Rayleigh number is given by
where
Moreover, the minimum (21) is attained at the positive solution of the fourth-order algebraic equations \(s(x)=0\), with \(x=a^2\) and
where
and
For that matter, the equation \(s(x)=0\) admits at least one positive root since
Let us finally point out that in the absence of rotation (i.e. for \({\mathcal {T}} \rightarrow 0\)) from (19) we recover the stationary threshold found in [41], while confining ourselves to the case of a single component fluid (i.e. for \({\mathcal {C}}\rightarrow 0\)), (19) coincides with the instability threshold found in [39]. When the Soret effect is neglected (i.e. for \({\mathcal {S}}\rightarrow 0\)), one obtains that \({\mathcal {R}}_S= f(a^2_c) + {\mathcal {C}}\).
3.2 Oscillatory convection threshold
In order to determine the instability threshold for the onset of oscillatory convection, the growth rate of the system \(\sigma\) needs to be purely imaginary, hence let us consider \(\sigma =i \sigma _1\), with \(\sigma _1 \in R-\{ 0 \}\), so (14) becomes
whit
Imposing the imaginary part \(Im({\mathcal {R}})\) of (22) to vanish, we get
Hence, necessary conditions for the onset of oscillatory convection are
Consequently, the critical Rayleigh number for the onset of oscillatory convection is
where \({\mathcal {B}}=\Bigl (1\!+\!\dfrac{1}{\epsilon _1 \mathrm{Le}} \Bigr )\), while the frequency of the oscillations is given by
Since the minimum of (26) with respect to \(n \in {\mathbb {N}}\) is attained at \(n=1\), the oscillatory critical Rayleigh number is given by
or, equivalently,
hence, while the oscillatory Rayleigh number given by (28) does not depend on the Soret number \({\mathcal {S}}\), i.e. the Soret effect does not directly affect the oscillatory instability threshold, from (29) one gets
and convection arises through stationary motions. As shown for the stationary threshold, in the absence of rotation from (26) we recover the same oscillatory instability threshold found in [41]. Let us remark that when a binary mixture and the Soret effect are considered, convection can arise via steady or oscillatory motions, while the principle of exchange of stabilities was proved for the single component case, so, in that case, oscillatory convection cannot occur (see [39].
3.3 Remarks
Since
the chemical component dissolved at the bottom of the layer has a stabilizing effect on the onset of convection, i.e. it delays the onset of convection through both stationary and oscillatory motions. Moreover,
this means that rotation has a stabilizing effect on the onset of both steady and oscillatory convection. As one is expected, both the rotation and the dissolved solute act to stop heat transfer and fluid motion through convection. From (20) and (28) one obtains
that is a necessary and sufficient condition for the onset of stationary convection. Moreover, the steady and oscillatory instability thresholds (20) and (28) are straight lines in the \(({\mathcal {C}},{\mathcal {R}})\) plane, so for increasing \({\mathcal {C}}\) there is a transition from steady to oscillatory convection in correspondence of the intersection point
4 Nonlinear stability
Let us consider the nonlinear system (10)\(_{1,2}\) and (4)\(_{5,6}\)
The threshold for the nonlinear stability of the conduction solution will be determined employing the differential constraint approach [18]. Therefore, denoting by \((\cdot ,\cdot )\) and \(\Vert \cdot \Vert\) inner product and norm on the Hilbert space \(L^2(V)\), respectively, let us set
where \(\mu\) is a positive coupling parameter to be chosen. Retaining (33)\(_{1,2}\) as constraints, integrating over the periodicity cell Eq. 33)\(_3\) multiplied by \(\theta\) and Eq. (33)\(_4\) multiplied by \(\gamma\), adding the resulting equations one gets
where
and
is the space of kinematically admissible solutions. Let us introduce the Lagrange multipliers \(\lambda ^{'}(\mathbf{x})\) and \(\lambda ^{''}(\mathbf{x})\), hence, the maximum problem (36) is equivalent to
where
and the following operators were defined:
Theorem 4.1
Condition \(m<1\) guarantees the global, nonlinear stability of the stationary conduction solution with respect to the \(E-norm\).
Proof
By virtue of Poincaré inequality, one obtains that \(D \ge \pi ^2 \Vert \theta \Vert ^2 + \mu \pi ^2 \Vert \gamma \Vert ^2\), hence, if \(m<1\) from (35) it follows
with \({\hat{\alpha }}=\min (1,1/\epsilon _1 \mathrm{Le})\), i.e. condition \(m<1\) implies \(E(t) \rightarrow 0\) at least exponentially. Moreover, multiplying (4)\(_1\) by \(\mathbf{u}^f\) and (4)\(_2\) by \(\mathbf{u}^p\), one gets
hence, by virtue of Cauchy–Schwarz inequality,
Adding (40)\(_1\) and (40)\(_2\) one finally obtains
i.e. if \(m<1\) the seepage velocities \(\mathbf{u}^f\) and \(\mathbf{u}^p\) exponentially go to zero, hence, the global, nonlinear stability of the conduction solution with respect to the \(E-\)norm is guaranteed. \(\hfill\square\)
Remark 4.1
If \({\mathcal {R}}_E\) is the critical value of the Rayleigh number such that \(m=1\), condition \(m<1\) is equivalent to condition \({\mathcal {R}}<{\mathcal {R}}_E\).
The Euler–Lagrange equations associated with (37) are
Employing normal modes representation in (42):
the global nonlinear stability threshold with respect to the \(E-\)norm is found requiring zero determinant for the system
\(a^2=l^2+m^2\) being the wavenumber, while \(\Lambda _n=a^2+n^2 \pi ^2\). Hence, one obtains the stability condition
where the critical nonlinear Rayleigh number is found to be
where \(X= {\mathcal {C}}a^2 (H_1-2 H_2 +H_3) + \Lambda _n (H_1 H_3 - H_2^2)\) and \(Y= {\mathcal {C}}a^2 (H_1-2 H_2 +H_3) + 2 \Lambda _n (H_1 H_3 - H_2^2)\). The maximum of (46) with respect to \(\mu\) is attained at
consequently
In conclusion, we obtained that \({\mathcal {R}}_E=f(a_c^2)\) and
therefore, there are regions of possible subcritical instabilities. However, for \({\mathcal {S}}\rightarrow 1\) the coincidence between the stationary threshold \({\mathcal {R}}_S\) and the global nonlinear threshold \({\mathcal {R}}_E\) is achieved, even though the dependence of the instability thresholds on the concentration field is lost. Let us observe that the nonlinear stability threshold \({\mathcal {R}}_E\) coincides with the stability threshold obtained when the Soret effect is not taken into account, therefore, if \({\mathcal {R}}<{\mathcal {R}}_E\), the thermal conduction solution is unconditionally stable, regardless of what value \({\mathcal {C}}\) has and no matter of whether the Soret effect is taken into account or not, hence, the global nonlinear stability threshold obtained by the energy (34) is affected only by rotation and the stabilizing effect of the concentration gradient on the onset of convection is not achieved. Let us remark that condition (31) becomes
5 Numerical simulations
The purpose of this section is to numerically investigate the asymptotic behaviour of steady and oscillatory thresholds (20) and (28) with respect to the meaningful parameters of the model. Since our thresholds are consistent with those ones found in [41], let us fix \(\{\xi =0.1, K_r=1.5, \eta =1.5, \epsilon _1 \mathrm{Le} =55.924 \}\) in the following simulations.
For high concentrations of the dissolved chemical component, convection sets in through oscillatory motions, indeed in Fig. 1a the linear dependence of the Rayleigh number on the chemical Rayleigh number is depicted, and, for the chosen set of parameters, the critical value of the concentration Rayleigh number for which there is a switch from stationary to oscillatory convection is \({\mathcal {C}}^{*} =4.0839\).
In Table 1(a) and (b) the stabilizing effect of rotation on the onset of convection is displayed, for low salt concentration - cfr. 1(a) - and for high salt concentration - cfr. 1(b).
Table 2 and Fig.1b show the stabilizing effect of salt concentration on the onset of convection and, in particular, as \({\mathcal {C}}\) increases, the increasing of \({\mathcal {R}}_O\) is slower than the increasing of \({\mathcal {R}}_S\) and, as already observed, for \({\mathcal {C}}^*=4.0839\) there is the switch from steady to oscillatory convection. While the Soret effect does not directly affect the oscillatory instability threshold, as already pointed out, its increasing leads to a decreasing of the thermal critical stationary Rayleigh number, so the Soret effect has a inhibiting effect on the onset of stationary convection (see Table 3 and Fig. 2b).
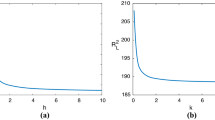
On the other hand, \(\epsilon _1 Le\) does not directly affect the steady instability threshold but has a destabilizing effect on the onset of oscillatory convection (see Fig. 2a).
The condition (31) gives us a prediction of the type of motions through which convection will arise and it is tested in Table 4, in particular Table 4(a), shows that for \(\epsilon _1 \mathrm{Le} \le 1\) the necessary conditions for the onset of oscillatory convection are not satisfied, so convection can arise only via stationary motions.
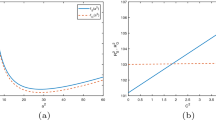
In Fig. 3a, b the steady and oscillatory thresholds and the global nonlinear threshold are depicted for quoted values of the Soret number, in particular for \({\mathcal {S}}=1\) the coincidence between \({\mathcal {R}}_E\) and \({\mathcal {R}}_S\) is depicted in (3)b.

a Critical steady and oscillatory Rayleigh numbers plotted as functions of the concentration Rayleigh number. b Steady and oscillatory thresholds for quoted values of the concentration Rayleigh number. The other parameters are fixed as \(\xi =0.1, K_r=1.5, \eta =1.5, \epsilon _1 \mathrm{Le} =55.924, {\mathcal {T}}^2=10, {\mathcal {S}}=0.5\)

a Oscillatory thresholds for quoted values of \(\epsilon _1 \mathrm{Le}\) for \(\xi =0.1, K_r=1.5, \eta =1.5, {\mathcal {C}}=5, {\mathcal {T}}^2=10, {\mathcal {S}}=0.5\). b Stationary thresholds for quoted values of the Soret number \({\mathcal {S}}\) for \(\xi =0.1, K_r=1.5, \eta =1.5, \epsilon _1 \mathrm{Le} =55.924, {\mathcal {T}}^2=10, {\mathcal {C}}=5\)

The steady and oscillatory thresholds and the global nonlinear threshold are plotted for quoted values of the Soret number. The other parameters are fixed as \(\xi =0.1, K_r=1.5, \eta =1.5, \epsilon _1 \mathrm{Le} =55.924, {\mathcal {T}}^2=10, {\mathcal {C}}=5\)
6 Conclusions
In the present paper the onset of convection in a bi-disperse porous layer, filled by an incompressible fluid mixture, that uniformly rotates about a vertical axis and that is simultaneously heated and salted from below, was studied. Taking into account the Soret effect, via linear instability analysis it was determined that convection can set in via stationary or oscillatory motions and that the critical thermal Rayleigh numbers for the onset of convection and the concentration Rayleigh number have a linear dependence on each other. Moreover, both rotation and salt concentration have a stabilizing effect on the onset of steady and oscillatory convection. Through differential constraint approach, the global nonlinear stability threshold was determined and it was found that regions of possible subcritical instabilities are present. Numerical simulations were performed in order to test the theoretical proven results.
Availability of data and materials
Data sharing not applicable - no new data generated.
Code availability
Not applicable.
References
S. Chandrasekhar, Hydrodynamic and Hydromagnetic Stability (Dover Publicationas, 1981)
R. De Luca, S. Rionero, Dynamic of rotating fluid layers: L2-absorbing sets and onset of convection. Acta Mech. 228, 4025–4037 (2017)
R. De Luca, S. Rionero, Steady and oscillatory convection in rotating fluid layers heated and salted from below. Int. J. Non-Lin. Mech. 78, 121–130 (2016)
G. Mulone, S. Rionero, Unconditional nonlinear exponential stability in the Bénard problem for a mixture: necessary and sufficient conditions. Atti della Accademia Nazionale dei Lincei. Classe di Scienze Fisiche, Matematiche e Naturali. Rendiconti Lincei. Matematica e Applicazioni 9(9), 221–236 (1998)
P. Vadasz, Coriolis effect on gravity-driven convection in a rotating porous layer heated from below. J. Fluid Mech. 376, 351–375 (1998)
P. Vadasz, Flow and Thermal Convection in Rotating Porous Media (Handbook of porous media, 2000), pp. 395–440
F. Capone, M. Gentile, Sharp stability results in LTNE rotating anisotropic porous layer. Int. J. Therm. Sci. 134, 661–664 (2018)
F. Capone, R. De Luca, M. Gentile, Instability of vertical throughflow in porous media under the action of a magnetic field. Fluids 4(4), 191 (2019)
F. Capone, R. De Luca, Porous MHD convection: effect of Vadasz inertia term. Transp. Porous Medi. 118(3), 519–536 (2017)
F. Capone, R. De Luca, Soret phenomenon in porous Magneto-Hydrodynamics. Ric. Mat. 70(1), 315–329 (2021)
F. Capone, R. De Luca, Double diffusive convection in porous media under the action of a magnetic field. Ric. Mat. 68(2), 469–483 (2019)
F. Capone, S. Rionero, Brinkman viscosity action in porous MHD convection. Int. J. Non-Lin. Mech. 85, 109–117 (2016)
F. Capone, S. Rionero, Porous MHD convection: stabilizing effect of magnetic field and bifurcation analysis. Ric. Mat. 65(1), 163–186 (2016)
A. Zeeshan, R. Ellahi, M. Hassan, Magnetohydrodynamic flow of water/ethylene glycol based nanofluids with natural convection through a porous medium. Eur. Phys. J. Plus 129, 261 (2014)
M. Sheikholeslami, Cuo-water nanofluid free convection in a porous cavity considering Darcy law. Eur. Phys. J. Plus 132, 55 (2017)
F. Capone, M. Gentile, A.A. Hill, Double-diffusive penetrative convection simulated via internal heating in an anisotropic porous layer with throughflow. Int. J. Heat Mass Transf. 54(7–8), 1622–1626 (2011)
F. Capone, R. De Luca, On the stability-instability of vertical throughflows in double diffusive mixtures saturating rotating porous layers with large pores. Ric. Mat. 63(1), 119–148 (2014)
A.A. Hill, A differential constraint approach to obtain global stability for radiation-induced double-diffusive convection in a porous medium. Math. Meth. Appl. Sci. 32(8), 914–921 (2009)
F. Capone, R. De Luca, M. Vitiello, Double-diffusive Soret convection phenomenon in porous media: effect of Vadasz inertia term. Ric. Mat. 68(2), 581–595 (2019)
P. Falsaperla, A. Giacobbe, G. Mulone, Double diffusion in rotating porous media under general boundary conditions. Int. J. Heat Mass Transf. 55, 2412–2419 (2012)
S. Lombardo, G. Mulone, Necessary and sufficient conditions of global nonlinear stability for rotating double-diffusive convection in a porous medium. Contin. Mech. Thermodyn 14, 527–540 (2002)
M.S. Malashetty, M.S. Swamy, W. Sidram, Double diffusive convection in a rotating anisotropic porous layer saturated with viscoelastic fluid. Int. J. Therm. Sci. 50(9), 1757–1769 (2011)
Z.Q. Chen, P. Cheng, C.T. Hsu, A theoretical and experimental study on stagnant thermal conductivity of bidispersed porous media. Int. Comm. Heat Mass Transf. 27, 601–610 (2000)
D.A. Nield, A.V. Kuznetsov, The onset of convection in a bidisperse porous medium. Int. J. Heat Mass Transf. 49(17–18), 3068–3074 (2006)
D.A. Nield, A.V. Kuznetsov, A two-velocity temperature model for a bi-dispersed porous medium: forced convection in a channel. Trans. Porous Med. 59, 325–339 (2005)
D.A. Nield, A.V. Kuznetsov, Heat Transfer in Bidisperse Porous media: Transport Phenomena in Porous Media III, pp. 34–59 (2005)
G. Imani, K. Hooman, Lattice Boltzmann pore scale simulation of natural convection in a differentially heated enclosure filled with a detached or attached bidisperse porous medium. Trans. Porous Med. 116, 91–113 (2017)
F. Capone, R. De Luca, M. Gentile, Thermal convection in rotating anisotropic bidispersive porous layers. Mech. Res. Comm. 110, 103601 (2020)
F. Capone, R. De Luca, The effect of the Vadasz number on the onset of thermal convection in rotating bidispersive porous media. Fluids 5(4), 173 (2020)
M. Gentile, B. Straughan, Bidispersive vertical convection. Proc. R. Soc. A. 473(2207), 20170481 (2017)
M. Gentile, B. Straughan, Bidispersive thermal convection. Int. J. Heat Mass Transf. 114, 837–840 (2017)
B. Straughan, Stability and wave motion in porous media, Applied mathematical sciences, Springer, Cham, Switzerland 165 (2008)
A.J. Badday, A.J. Harfash, Chemical reaction effect on convection in bidispersive porous medium. Transp. Porous Med. 137, 381–397 (2020)
M. Gentile, B. Straughan, Bidispersive thermal convection with relatively large macropores, J. Fluid Mech. 898 (2020)
B. Straughan, Anisotropic bidispersive convection. Proc. R. Soc. A. 475, 20190206 (2019)
B. Straughan, Horizontally isotropic double porosity convection. Proc. R. Soc. A. 475, 20180672 (2019)
F. Capone, G. Massa, The effects of Vadasz term, anisotropy and rotation on bi-disperse convection. Int. J. Non-Lin. Mech. 135, 103749 (2021)
F. Capone, R. De Luca, G. Massa, Effect of anisotropy on the onset of convection in rotating bi-disperse Brinkman porous media. Acta Mech. 232, 3393–3406 (2021)
F. Capone, R. De Luca, M. Gentile, Coriolis effect on thermal convection in a rotating bidispersive porous layer. Proc. R. Soc. A. 476(2235), 20190875 (2020)
F. Capone, M. Gentile, G. Massa, The onset of thermal convection in anisotropic and rotating bidisperse porous media. Z. Angew. Math. Phys. 72, 169 (2021)
B. Straughan, Bidispersive double diffusive convection. Int. J. Heat Mass Transf. 126(A), 504–508 (2018)
B. Straughan, Effect of inertia on double diffusive bidispersive convection. Int. J. Heat Mass Transf. 129, 389–396 (2019)
H.A. Challoob, A.J. Harfash, A.J. Harfash, Bidispersive double diffusive convection with relatively large macropores and generalized boundary conditions: Phys. Fluids 33, 034114 (2021)
A.J. Badday, A.J. Harfash, Double-diffusive convection in bidispersive porous medium with chemical reaction and magnetic field effects. Transp. Porous Med. 139, 45–66 (2021)
D.A. Nield, C.T. Simmons, A brief introduction to convection in porous media. Transp. Porous Med. 130, 237–250 (2019)
M. Eslamian, Advances in thermodiffusion and thermophoresis (soret effect) in liquid mixtures, Front. Heat Mass Transf. 2(4) (2011)
P. Falsaperla, G. Mulone, B. Straughan, Bidispersive-inclined convection. Proc. R. Soc. A 472(2192), 20160480 (2016)
Acknowledgements
This paper was performed under the auspices of the GNFM of INdAM. R. De Luca and G. Massa would like to thank Progetto Giovani GNFM 2020: “Problemi di convezione in nanofluidi e in mezzi porosi bidispersivi”.
Funding
Open access funding provided by Università degli Studi di Napoli Federico II within the CRUI-CARE Agreement. No funding was received to assist with the preparation of this manuscript.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by FC, RDL and GM. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests to declare that are relevant to the content of this article.
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Capone, F., De Luca, R. & Massa, G. The onset of double diffusive convection in a rotating bi-disperse porous medium. Eur. Phys. J. Plus 137, 1034 (2022). https://doi.org/10.1140/epjp/s13360-022-03177-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjp/s13360-022-03177-6