
Abstract
We present a class of tachyon-free (stable) AdS as well as dS solutions in the context of type IIA orientifold compactifications. This model is based on a type IIA setting having geometric flux which, in addition, also includes the usual NS–NS three-form flux \(\textrm{H}_3\) and the RR p-form fluxes \(\textrm{F}_p\) for \(p \in \{0, 2, 4, 6\}\). Although all the saxionic moduli are stabilized, there remains a combination of the RR axions which is flat, and the dS solution is realized through the D-term effects induced by the geometric fluxes, without which one can only have AdS solutions. Using flux scaling arguments we also discuss how to engineer a parametric control in these models, in the sense of realizing the respective AdS/dS solutions in large volume, weak string-coupling as well as large complex-structure regime. We also discuss open possibilities (e.g. about the unknown status on having the complete set of Bianchi identities) under which such tachyon-free dS solutions may or may not be viable.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Realizing de-Sitter solutions and possible obstructions on the way of doing it have been always in the center of attraction since decades. In this regard, the historicity of efforts on finding de-Sitter vacua in string theory (inspired) setups can be classified into the following three categories:
-
Existence: Starting from a simple model building with minimal ingredients at hand, there have been several de-Sitter no-go scenarios proposed from time to time. For example, several no-go theorems forbidding de-Sitter (dS) and inflationary realizations have been proposed in a series of works [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23], mostly in the context of type IIA orientifold compactifications. In fact these no-go results have played a central role in the recent revival of the swampland conjectures [24, 25]. However, the good thing about any no-go result is the fact that it happens to hold in a framework with a given set of assumptions, and for a model builder aiming to realize de-Sitter solution, the very first task is to explore the loopholes or the limits under which the no-go necessities can be evaded, e.g. see [26] for a recent charting of the (anti-) de Sitter vacua from the perspective of ten-dimensional supergravities. In contrary to the (minimal) de-Sitter no-go scenarios, in the meantime there have been several proposals for realizing (stable) de-Sitter vacua [27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46]; see [47, 48] also for the F-theoretic initiatives taken in this regard.
-
Stability: After evading some no-go results by adding more ingredients, the immediate question is about the stability of the subsequent de-Sitter solution, especially to ensure if those solutions are true minima or tachyonic in nature. This is a quite crucial condition to check as there have been plethora of de-Sitter solutions constructed by simple attempts of evading the no-go results, many of which eventually turned out to be tachyonic in nature [3,4,5, 10, 17, 49,50,51]. In fact the existence of such tachyonic de-Sitter solutions demanded the need of refinements in the original swampland conjectures [24, 25] leading to numerous amount of work with similar interests including the Quintessence alternative [52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74] and the challenges it faces regarding the discrepancy in Hubble constant [75, 76].
-
Viability: This step is usually combined with what we referred to ‘Stability’ in the second step. However, given the fact that this appears to cover a wider range of open possibilities, it may be worth considering it separately. Given that very little is known about the corrections which induce the scalar potential pieces to perform moduli stabilization, it is an important question to ask if the de-Sitter vacua which pass the tests in the first two steps are genuine or not. For example, the questions regarding scale separation and field excursions in moduli space [77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93] without breaking effective field theory (EFT) assumptions, tadpole conjecture [94,95,96] and ways to avoid it [97] may be considered in this class. In fact, it happens very often that the scalar potential corrections are known only in pieces and are sometimes discovered/challenged with new updates, and in this regard, a perfect check about viability may be considered as the toughest task for string phenomenologists!
In the current work our aim is to analyse the flux vacua arising from a concrete type IIA CY orientifold model along the aforesaid three steps. For that purpose we begin with considering a simple type IIA model which includes geometric flux along with the standard three-form NS–NS \((\textrm{H}_3)\) flux and the RR p-form \(\textrm{F}_p\) fluxes for \(p \in \{0, 2, 4, 6\}\). In our approach we first investigate the de-Sitter scenarios which can be obtained by evading the standard no-go results, e.g. those obtained from the moduli dynamics restricted to the volume/dilaton plane [4,5,6]. In this process we make some specific choice of fluxes such that
-
The only geometric flux which arise in the scalar potential corresponds to the D-term effects which are positive semi-definite. All the geometric flux contributions contributing to the F-term effects in the scalar potential are set to zero, which subsequently also facilitates in satisfying the NS–NS Bianchi identities without loosing any D-term fluxes.
-
We consider only some ‘suitable’ RR flux components to be non-zero while setting many of those to zero. This facilitates in making the tadpole terms independent of one flux which subsequently does not get bounded by O6-charge through D6 tadpole conditions, and turns out to be useful in realizing larger volume and weaker string coupling after the minimization process. However, recalling the fact that Romans mass term along with geometric flux is needed to evade the previously known no-go results, we always keep non-zero Romans mass along with some geometric flux components to be non-zero.
The T-dual completions of the four-dimensional type II effective theories by including the (non-)geometric fluxes have been initiated in the toroidal context [8, 98,99,100,101,102], and a couple of interesting efforts have been initiated in establishing a concrete connection between the (non-)geometric ingredients of the two theories in [103, 104], and a full mapping with the T-duality at the level of NS–NS non-geometric flux components and the two scalar potentials, has been presented in [105]. In [21], it was shown that a geometric type IIA setup corresponds to a non-geometric type IIB under a set of T-dual transformations relating the fluxes and moduli of the two theories (e.g. see [105]). In fact many of the (geometric) type IIA de-Sitter no-go scenarios have been T-dualized to type IIB case with non-geometric fluxes [21], which has refined the regime of de-Sitter search in various possible ways.
However, regarding the viability there remains a subtle and open issue. It is naively assumed that a consistent incorporation of the various (non-)geometric fluxes enriches the compactification backgrounds which creates better possibilities for model building, however one does not known how many and which type of fluxes can be simultaneously turned-on, respecting the various Bianchi identities and the tadpole cancellation conditions. In this regard, there have been two formulations for computing the Bianchi identities; the standard one mostly applicable to toroidal orientifolds involves fluxes with non-cohomology indices [106,107,108], while in the cohomology formulation fluxes are represented using the non-trivial cohomology indices [103, 104, 107]. However, a mismatch between the two sets of Bianchi identities of these two formulations have been observed in [107, 109] and studied in some good detail in [110, 111]. The additional unknown identities in the cohomology formulation, if they exist, might be relevant for our de-Sitter solution along with the recent studies performed in [112,113,114,115,116,117].
This article is organised as follows. Section 2 presents a brief collection of the relevant ingredients about the generic type IIA models with geometric flux, having some discussion about the possible scenarios in which the standard/known de-Sitter no-go results can be evaded, along with presenting an explicit type IIA construction with geometric flux. Subsequently, a detailed analysis of the AdS as well as dS solutions is presented in Sect. 3. Finally we summarise our results in Sect. 4 and provide the additional useful pieces of information in Appendix A.
2 Type IIA orientifold with geometric flux
The four-dimensional effective potentials arising from type II flux compactifications and their applications towards moduli stabilization have been extensively studied in series of works [27, 118,119,120,121,122,123,124,125,126,127]. In particular, the study of nongeometric flux compactifications and their four-dimensional scalar potentials have led to a continuous progress in various phenomenological aspects such as towards moduli stabilization, in constructing de-Sitter vacua and also in realizing the minimal aspects of inflationary cosmology [98, 99, 107, 108, 112,113,114,115,116, 128,129,130,131,132,133,134,135,136,137]. In the context of Type II supergravity theories, such (non-)geometric fluxes can generically induce tree-level contributions to the scalar potential for all the moduli and hence can subsequently help in dynamically stabilizing them through the lowest order effects. Moreover, the common presence of the nongeometric fluxes in Double Field Theory (DFT), superstring flux-compactifications, and the gauged supergravities has helped in understanding a variety of interconnecting aspects in these three formulations along with opening new windows for exploring some phenomenological aspects as well [98, 101, 102, 106, 109, 130, 138,139,140,141,142,143,144,145,146,147,148,149,150,151,152,153]. Moreover, the nongeometric flux compactification scenarios also present some interesting utilisations of the symplectic geometries [154, 155] to formulate the effective scalar potentials; e.g. see [156,157,158], which generalize the work of [118, 119] by including the nongeometric fluxes. The ten-dimensional origin of the four-dimensional nongeometric scalar potentials have been explored via an iterative series of works in the supergravities [147,148,149,150, 152, 153, 155, 159,160,161,162,163] and through some robust realization of the Double Field Theory (DFT) reduction on Calabi Yau threefolds [164, 165]. Moreover, a concrete connection among the type II effective potentials derived from DFT reductions and those of the symplectic approach has been established in [156, 157]. In this section we recollect the relevant ingredients for type IIA Calabi–Yau orientifold models, and more details can be directly refereed to [105].
2.1 A couple of scenarios evading the known dS no-go results
The moduli dynamics in the low energy four-dimensional effective supergravity theories are governed by the so-called F- and D-term contributions which are encoded in the Kähler potential, the (flux) superpotential and the gauge kinetic functions. The four-dimensional geometric type IIA scalar potential arising from these three ingredients can be also collected as under,Footnote 1
where
Here, apart from having the 4-dimensional dilaton modulus D, we have introduced two other moduli, namely \(\rho \) and \(\sigma \), via the redefinition in the overall volume (\({{\mathcal {V}}}\)) of the Calabi–Yau threefold and its mirror volume \({{\mathcal {U}}}\) by considering their respective two-cycle volume moduli \(\mathrm t^a\) and \(\mathrm z^i\) as below,
where \(\gamma ^a\)’s denote some angular Kähler moduli corresponding to the compactifying Calabi–Yau threefold while \(\theta ^\lambda \)’s corresponds to the angular Kähler moduli on the mirror Calabi–Yau threefold. Similarly, \(\kappa _{abc}\) denotes triple-intersection numbers on the Calabi–Yau threefold while \(k_{\rho \gamma \delta }\) denotes the same for the respective mirror Calabi–Yau threefolds. In addition, the quantities \(A_i\)’s in Eq. (2.2) denote some functions of fluxes, and the moduli other than volume modulus \(\rho \), the complex-structure modulus \(\sigma \) and the 4-dimensional dilaton D. For completeness, the explicit expressions of \(A_i\)’s are given in Eq. (A.7) of the Appendix A. In fact one finds that all the \(A_i\)’s except \(A_9,\, A_{10}, \, A_{12}\) and \(A_{13}\) are positive semi-definite.
There have been several no-go results against the de-Sitter realization in type IIA based simple models, especially arising from the volume/dilaton analysis [2, 5]. One possible method to evade such no-go results is to include the geometric flux along with a non-zero Romans mass term. Several attempts for de-Sitter realization have been made exploiting this observations [5], however best to our knowledge there is no proposed model which realizes non-tachyonic de-Sitter solution using integer valued fluxes satisfying the Bianchi identities, at least all of the known ones. Let us note that the scalar potential pieces in Eq. (2.2) have complicated coefficients (depending on other moduli) and therefore some of the well known de-Sitter no-go results arising from minimalistic volume/dilaton analysis, e.g. [2, 5, 92, 93], may be easily evaded for the more generic constructions. This scalar potential can be studied for the searching the stable vacua through minimization of the moduli/axions, and in our generic approach we take the following two steps:
-
Step-1: First we consider the two-field volume/dilaton analysis in order to rule out certain scenarios like those proposed in [2, 5].
-
Step-2: Subsequently, in a more general analysis, one also includes the dynamics of the complex-structure moduli in order to further test the de-Sitter solutions obtained by evading the constraints arising from the two-field (volume/dilaton) analysis of Step-1.
Using the derivatives for generic scalar potential as given in Eq. (2.1) along with (2.2) w.r.t. the volume modulus \(\rho \) and the dilaton D, we find the following extremization conditions,
Moreover, the volume-dilaton sector of the Hessian matrix can be given as below,
In a nutshell, in order to investigate the possibility of de-Sitter realization, we need to check if there is a simultaneous solution to the following set of conditions (e.g. see [13]),
Using Eq. (2.6), one can check that several possible scenarios simply do not allow any dS solutions at all. For example, if one does not include the geometric flux and/or the Romans mass term, it is straight forward to check that the conditions in Eq. (2.6) are never satisfied, which is something observed in [2, 5]. Therefore, one has to include non-zero geometric flux as well as Romans mass term as a requirement for evading the simplest kind of dS no-go constraint. Subsequently, there can be many solutions in support of finding the de-Sitter solution, however note that this analysis considers only the volume-dilaton sector and does not include all moduli, and hence that can have possibility to further rule out the solutions allowed at this stage. However, in case there are some no-go against finding de-Sitter in this sector itself, then there is no need to include all the moduli together, and the result remains conclusive. Now we present a couple of scenarios in which dS no-go constraints can be evaded.
2.1.1 Scenario 1:
2.1.2 Scenario 2:
2.1.3 Scenario 3:
In the next section, we will present some concrete models where we will present benchmark examples with specific choice of fluxes such that the necessary conditions of some of these scenarios can be met along with realizing the basic EFT requirements such as large volume, large complex structure and weak coupling values at the minimum.
2.2 Investigating the possible flux scalings
In this subsection we will explore the possible flux scaling which could be relevant in order to have some estimates of moduli VEVs in the process of moduli stabilization in some generic fashion. For this we need the following axionic flux combinations which are needed to express the scalar potential,
Here \(b^a\) counts the NS–NS \(B_2\) axionic moduli and the \((\xi ^{0}, \xi ^{k})\) arise from the three-form potential \(C_3\). In addition, \((e_0, e_a, m^a, m_0)\) denote to the flux quanta corresponding to the RR fluxes \((F_6, F_4, F_2, F_0)\) respectively while \(\textrm{H}\) and w flux components corresponds to the NS–NS three-form flux \(H_3\) and the geometric flux.
2.2.1 Scenario 1:
As mentioned in Eq. (2.7), demanding \(V_{f_2} \propto \textrm{f}^a \,g_{ab} \, \textrm{f}^b = 0\) and \(V_{f_6} \propto \textrm{f}_0^2= 0\) simultaneously, where \(g_{ab}\) is the moduli space metric, we get,
This shows that \((h^{1,1}_- + 1)\) number of axions are fixed. Noting the fact there one can always make a rotation of the flux orbits [23] such that all the axionic dependences are absorbed in the new flux combinations like those clubbed in Eq. (2.10). With this observation one can satisfy both the demands \(V_{f_2} = 0\) and \(V_{f_6} = 0\) along with satisfying \(m^a = 0\) and \(e_0 = 0\) subject to imposing the following conditions on the axions,
which results in a stronger constraint on the axions. Moreover, let us consider the flux scalings relevant for the saxionic moduli by looking into the scalar potential pieces given in Eq. (2.2). Assuming that \(V_{f_2} = 0 = V_{f_6}\) and all remaining terms to be non-zero and comparable to one another at the extremum, we anticipate the following flux scaling for the corresponding moduli VEVs,
2.2.2 Scenario 2:
As mentioned in Eq. (2.8), demanding \(V_{f_2} \propto \textrm{f}^a \,g_{ab}\, \textrm{f}^b = 0\) and \(V_{f_4} \propto \textrm{f}_a \,g^{ab} \, \textrm{f}_b= 0\) simultaneously we get,
In fact one can satisfy \(V_{f_2} = 0\) and \(V_{f_4} = 0\) along with satisfying \(m^a = 0\) and \(e_a = 0\) subject to imposing the following conditions on the axions,
which results in a stronger constraint on the axions. Similar to the previous scenario, the flux scalings relevant for the saxionic moduli can be estimated by looking into the scalar potential pieces given in Eq. (2.2). Assuming that \(V_{f_2} = 0 = V_{f_4}\) and all remaining terms to be non-zero and comparable to one another at the extremum, we anticipate the following flux scaling for the corresponding moduli VEVs,
2.2.3 Scenario 3:
As mentioned in Eq. (2.9), demanding \(V_{f_6} \propto \textrm{f}_0^2 = 0\) and \(V_{f_4} \propto \textrm{f}_a \,g^{ab} \, \textrm{f}_b = 0\) simultaneously we get,
In fact one can satisfy \(V_{f_6} = 0\) and \(V_{f_4} = 0\) along with satisfying \(e_0 = 0\) and \(e_a = 0\) subject to imposing the following conditions on the axions,
Similar to the previous scenario, the flux scalings relevant for the saxionic moduli can be estimated by looking into the scalar potential pieces given in Eq. (2.2). Assuming that \(V_{f_4} = 0 = V_{f_6}\) and all remaining terms to be non-zero and comparable to one another at the extremum, we anticipate the following flux scaling for the corresponding moduli VEVs,
We will discuss the relevance of these flux scalings in more explicit settings in the upcoming section.
2.3 Constructing a concrete type IIA orientifold model
In [21] it has been shown that the type IIA geometric flux models and a certain class of the type IIB non-geometric models (with special solutions of Bianchi identities) are T-dual to each other in the sense that there are certain transformations on the moduli/fluxes which exchange the scalar potential on the one theory with the same on the other. Now, we consider a simple type IIA construction which will be used to investigate the possibility of realizing tachyon-free AdS, Minkowskian and dS solutions, and their type IIB analogue can be generically read-off from the dictionary presented in [21].
In order to make some simplification for the explicitness of the computations, we consider the following topological quantities for the compactifying threefold,Footnote 2
Such an orientifold leads to the following fluxes/moduli in the 4D type IIA model, which has six real moduli and 10 flux parameters to begin with. These are collected as below,
We denote D-term fluxes with a hat in order to distinguish them from the geometric fluxes appearing in the F-term contributions. Subsequently, the total scalar potential arising from F- and D-terms can be given by Eq. (2.2) with the following simpler form of the \(A_i\) coefficients,
where we have used the triple intersection number \(\kappa _{111} = 6\) and the axionic flux combinations \(\textrm{f}_0\), \(\textrm{f}_1\) etc. are defined as below,
Here we note that all the coefficients except \(A_9, A_{10}, A_{12}\) and \(A_{13}\) are positive semidefinite, which is something which we have pointed out earlier for the generic case as well. In other words, apart from the local/tadpole piece in the scalar potential with a dilaton factor \(e^{3D}\) encoded in the coefficients \(A_{12}\) and \(A_{13}\), all the other pieces are positive semidefinite except for the two pieces involving the geometric flux \(w_1{}^1\) as seen from the coefficients \(A_9\) and \(A_{10}\). Therefore, for the purpose of hunting for the de-Sitter solutions, it would be a good idea to set this geometric flux component to zero, i.e. \(w_1{}^1 = 0\). However this will subsequently have an impact on the following two Bianchi identities,
Setting \(w_1{}^1 = 0\) will demand either to set \(w_{10} = 0\) or \(\hat{w}_1{}^{0} = 0\). However, given that we do not want to switch-off any of the (positive semidefinite) D-term piece in the scalar potential which could possibly be useful to make the dS uplift, we take \(w_{10} = 0\). This means that we are switching-off all the geometric flux components in the F-term contributions, and the only geometric flux effects are those arising from the D-term contributions.
3 Analyzing the flux vacua
It has been observed in [13] that having a non-zero Romans mass \(m_0\) with the presence of any one of the \(\textrm{F}_2, \textrm{F}_4\) or \(\textrm{F}_6\) fluxes can evade the simplest version of the dS no-go conditions obtained in the volume-dilaton analysis. This can be also seen from the Scenario-1 which we presented in the previous section. Now we take the flux choice for the RR flux such that
The type IIA scalar potential which we have at this stage can be expressed in the following simple form,
where we have used the first Bianchi identity of Eq. (2.24) along with the following simplified axionic flux combinations,
Using the scalar potential in Eqs. (3.2) and (3.3), it turns out that the extremization of three axions \(\xi ^0\), \(\xi _1\) and \(\textrm{b}^1\) results in satisfying the following two conditions,
where we keep the Romans mass parameter \(\textrm{f}^0 = m_0 \ne 0\) as that is necessary to avoid the well-known de-Sitter no-go theorems for geometric type IIA scenarios [3, 5]. Using Eq. (3.3), we find that this choice of RR-flux helps in setting axions \(\textrm{b}^1\) to zero and subsequently, only two (out of three) axionic moduli get stabilized as below,
We note that the process of axion minimization has also set \(A_1 = \frac{1}{4}\, m_0^2, A_2 = 0 = A_4\) and \(A_3 = \frac{1}{12}\, e_1^2\). Now one can have some estimates about the flux scalings corresponding to the simplified scalar potential in Eq. (3.2) which turns out to be given as below,
which shows that the string coupling \(g_s = e^{\langle \varphi \rangle }\) obtained from the VEV of the ten dimensional dilaton (\(\varphi \)) should scale as follows,
Note that similar flux scalings for saxion VEVs have been observed for the rigid toroidal orientifold of \({{\mathbb {T}}}^6/({{\mathbb {Z}}}_3 \times {{\mathbb {Z}}}_3)\) in [166], however we also have complex-structure moduli in our setup.
3.1 AdS vacua: without D-terms
Now, let us have the exact conditions for moduli stabilization in the absence of D-term effects, with the aim to engineer the fluxes so that we could look for the possibility of de-Sitter solutions by adding such effect as a second step.
In the absence of the D-term contribution, i.e. for \(\hat{w}_{11} = 0 = \hat{w}_1{}^0\), the saxionic extremization conditions can be satisfied for the following two sets of AdS solutions:
The Hessian analysis further shows that \(\textbf{AdS1}\) corresponds to a tachyonic solution while \(\textbf{AdS2}\) is a minimum. Given that saxionic VEVs have to be positive, we need to choose \(m_0\) and \(\textrm{H}_0\) of opposite sign, and subsequently there can be two possibilities for choosing the sign of the fluxes,
Note that the tadpole contributions in both the cases are \(N_{\textrm{flux}} < 0\) which is consistent with the standard literature of type IIA models without geometric flux (e.g. see [166, 167]). Without loss of any generality, let us take the first choice. Subsequently, the two AdS solutions can be equivalently expressed entirely in terms of fluxes as below,
These analytic results are extremely useful in the many ways. First let us observe that the exact AdS solutions in Eq. (3.11) confirm the previous estimates about the flux scalings for the saxionic VEVs as given in Eqs. (3.6) and (3.7). Also such flux scaling of the saxionic VEVs can help in determining the flux regions where the solutions can be physically acceptable and trustworthy. In this regard, we make the following points:
-
We observe that choosing suitably large values for the \(|e_1|\) flux can be used to realize larger VEVs for volume modulus \(\rho \) along with weaker values for the string coupling \(g_s = e^{\langle \varphi \rangle }\). Given that there are no non-geometric fluxes present in the model, the \(e_1\) flux is not restricted by the tadpole condition as well.
-
Also, we observe that the \(m_0\) flux should be taken to a minimum consistent value in order to realize large VEVs for volume modulus \(\rho \) as well as the having weak coupling, and therefore we prefer to set \(m_0 = 1\) in our numerical analysis.
-
It is obvious that the \(\textrm{H}^1\) flux should be taken to minimum values in order to have larger VEV for the complex structure modulus \(\sigma \) along with weak string coupling, and therefore we prefer to set \(\textrm{H}^1 = 1\) in our numerical analysis.
-
Although larger values for \(\textrm{H}_0\) could also help for realizing large VEVs for the complex-structure modulus \((\sigma )\), however this can happen only at the cost of enhancing the string coupling by a reduction of the dilaton factor \(e^{-\varphi }\). Thus we observe that large complex structure and weak coupling requirements are apparently contradictory to each other with respect to the choice of the \(\textrm{H}_0\) flux, and one has to find a viable balance to keep both in the physically valid regime.
-
However, choosing larger values for \(|e_1|\) flux can help in having weak-coupling and large volume realizations, and also leaves a scope for large complex structure realization by keeping the factor \(|e_1|/|\textrm{H}_0|\) large while having \(|\textrm{H}_0|\) large as well.
-
With these scaling arguments, we find that the moduli dynamics can be mainly controlled by two fluxes \(|e_1|\) and \(|\textrm{H}_0|\). However, demanding \(|e_1|/\textrm{H}_0\) and \(\textrm{H}_0\) to take large values has to be balanced by the need of large tadpole charge compensation, and so one would not prefer to take too large values for \(|\textrm{H}_0|\) and should be satisfied with those which are just enough to ensure \(\langle \sigma \rangle > 1\).
-
A couple of benchmark numerical samplings are presented in Tables 1 and 2.
3.2 dS vacua: with D-terms
In this section we investigate the effects of including D-term contributions which are generically positive semi-definite in nature, and hence one may expect to realize stable de-Sitter solution. Just to have some naive estimates (which may or may not be true as we will explore later on), momentarily if we simply assume that the stabilized values of the moduli/axions do not change significantly, then the D-term contributions to the scalar potential at the previously realized AdS minimum in Eq. (3.11) may be given as,
where we have used the saxion/axion VEVs corresponding to the \(\textbf{AdS2}\) solution in (3.11) which is a tachyon free minimum in the absence of D-terms. This naive estimate shows that a priory there appears to be a chance of uplifting the AdS to some dS solution under the assumption that the previously stabilized values remain (almost) fixed at their respective minimum. For that we need,
which can be satisfied if,
Just to have some rough estimate, for the flux choices taken in the samples S1–S4, the requirement in Eq. (3.14) simplifies into the following form,
So there appears to be a hope of uplifting the previous AdS solution to some de-Sitter for some choice of geometric flux and the triple intersection number. However, recall again that in arriving at this naive estimate, we have assumed that the previous VEVs of saxions are not significantly changed after including the D-term, which may not turn out to be correct, given that it depends on all the three saxions \(\varphi , \rho \) and \(\sigma \) and every piece in the scalar potential is on the same footing, in the sense of having no hierarchy to begin with.
Now we turn to explicitly solving the extremization conditions to investigate about the possibility dS solutions. Using the flux scaling arguments suggested in Eqs. (3.6) and (3.7) along with their validation for the absence of geometric flux scenarios in Eq. (3.11) we take the following ansatz to begin with,
In addition, we introduce a new parameter \(\alpha _4\) defined through the following flux ratio which is induced only through the D-term effects,
By considering these ansatz, similar to the previously realized AdS solutions which correspond to the flux choice considered as \(\{m_0> 0, \, e_1< 0, \, \textrm{H}_0 < 0, \, \textrm{H}^1 > 0\}\), we find that it does not solve the extremization conditions for \(\{\alpha _1> 0, \,\alpha _2>0, \, \alpha _3 >0, \, \alpha _4 \ge 0\}\). Therefore we conclude that the previous AdS solutions cannot be lifted to Minkowskian or dS solution by adding the D-terms of the type we considered.
However we find that there can be new Minkowskian/dS solutions (which does not arise as an uplifted version of the previous AdS solutions) for a different type of flux choice given as \(\{m_0> 0, \, e_1 < 0, \, \textrm{H}_0> 0, \, \textrm{H}^1 > 0\}\) and for exploring that possibility we consider the following ansatz,
To elaborate more on it we use Eq. (3.17) to get the following expressions for the three saxion extremization conditions,
while the scalar potential defined through Eqs. (3.2) and (3.3) takes the following form,
Subsequently one can get a Minkowskian or dS solution by solving the extremization conditions, in addition to consistently demanding the following constraint,
where equality corresponds to the Minkowskian solution. Interestingly we find that, there is a unique numerical solution for the Minkowskian case which corresponds to solving four polynomial equations in four unknowns \(\alpha _i\)’ resulting in,
Note that these \(\alpha _i\)’s can generically be some irrational numbers and a true Minkowskian solution will demand them to be take those precise values. However for numerical estimates we have presented rounded off figures for these \(\alpha _i\) parameters.
3.2.1 Numerical samplings for Minkowskian solutions:
For a set of flux choice with non-zero D-term flux \({\hat{\omega }}_{11}\), the results for various VEVs of the moduli/axions along with their Hessian Eigenvalues are mentioned in Tables 3 and 4.
3.2.2 Numerical samplings for de-Sitter solutions:
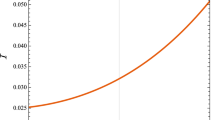
We have learnt from the numerical analysis done so far that for slightly larger values of the uplifting parameter \(\alpha _4\) as compared to the Minkowskian value mentioned in Eq. (3.21), one can realize tachyon-free dS solutions. For illustration purpose we take the flux sampling S4 and show the details on dS uplifting starting from AdS solutions via crossing the Minkowskian value, by simply varying the \(\alpha _4\) parameter. This is presented in Table 5.

One dimensional slices of scalar potential showing AdS to dS uplifting by \(\alpha _4\) parameter
3.3 Comments on viability of the dS vacua
In this section we present some comments about the viability of the tachyon-free dS solutions we have obtained, and try to explore under which conditions their stability/existence could be questioned, though we do not anticipate such possibilities to occur generically, in the sense of creating issues for the class of AdS/dS solutions we have presented.
3.3.1 On the integrality of the fluxes
Let us recall that our AdS solutions are realized with integer valued fluxes while in order to get the Minkowskian/dS solution, we need to find fluxes such that one satisfies the following condition according to the \(\alpha _4\) parameter defined in Eq. (3.16),
Note that the equality corresponds to the Minkowskian solution for which \(\alpha _4\) needs to satisfy Eq. (3.20) and this generically leads to an irrational value of \(\alpha _4\). Therefore, for integral values of fluxes and the triple intersection number \({\hat{\kappa }}_{111}\), a truly Minkowskian solution cannot be achieved. However for de-Sitter solutions one would need to take slightly larger values for \(\alpha _4\) as compared to the bound given in Eq. (3.22). For a chosen value of the \(\alpha _4\) parameter, we tabulate the positive real values for \(\{\alpha _1, \alpha _2, \alpha _3\}\) obtained as the possible solutions to the extremization conditions which are presented in Table 6.
In Table 6 we have also introduced a new parameter \(\gamma _0\) which determines the sign of the VEV of the scalar potential at a given extremum following from Eq. (3.19). This parameter \(\gamma _0\) is subsequently defined as below:
where
Using the set of values for \(\alpha _i\) parameters from Table 6 one can easily determine the VEVs of saxions for a chosen flux values using Eq. (3.17). Moreover, a detailed numerical analysis shows that for \(\alpha _4 \ge 0.45\), the three extremization conditions in Eq. (3.18) do not result in positive real solutions for the set of parameters \(\{\alpha _1, \alpha _2, \alpha _3\}\) which are used for determining the VEVs of their respective saxions. Given that one needs to satisfy the bound in Eq. (3.22) this shows that there is only a narrow width for \(\alpha _4\) parameter which is available for having the dS solutions. This can be estimated as:
Note that each of the quantities defining the parameter \(\alpha _4\) as seen above, are either fluxes or triple intersection numbers and hence should usually take integral values. Moreover as we have already argued to set \(m_0 = 1\) and \(\textrm{H}^1 =1\) for having large VEVs for volume modulus and complex-structure modulus respectively, we have the following condition on the remaining quantities:
Note that increasing \(|e_1|\) to have larger volume will demand either choosing quite (unnaturally) large value of intersection number \(\hat{\kappa }_{111}\) or a large value of \(\textrm{H}_0\) flux in order to stay withing the required range of the uplifting parameter \(\alpha _4\). However, let us not forget that \(\textrm{H}_0\) flux enters in the tadpole relation and hence can be bounded, unlike the \(|e_1|\) flux. So one may not have much freedom to enlarge \(\textrm{H}_0\) flux to a high value, though one cannot deny to have this possibility in generic CY orientifold models.
Now this suggests that there is a need for a delicate choice of fluxes as \(|e_1|\) large is needed for large volume VEV and a couple of such flux samplings with \(\alpha _4 = 0.44\), covering a bit the extreme possibilities can be taken as below,
3.3.2 Scale separation arguments
Let us note that our flux choice is such that one of the RR fluxes, namely \(|e_1|\), which governs the VEV of the overall volume modulus, does not appear in the tadpole condition at all, and hence it is not restricted by any upper bound. Subsequently, it is possible to realize quite large values for the VEV of the overall volume of the compactifying sixfold, i.e. \(\langle {{\mathcal {V}}} \rangle \gg 1\) along with weak string coupling \(\langle g_s \rangle \ll 1\) as can be seen from the benchmark models presented in Tables 5 and 7. Therefore, it is expected that the string scale \((M_s)\) and the Kaluza-Klein states \((M_{\textrm{KK}})\) will be separated from the AdS/dS scale for appropriate choice of fluxes.
3.3.3 Obstructions from the Bianchi identities
For type IIA orientifold case, it has been found [107, 111] that the two known formulations of Bianchi identities do not result in equivalent sets of constraints on the fluxes, and there are always some “missing identities” which can have impact on the vacua realized within the so-called symplectic or cohomology formulation of (non-)geometric fluxes. So it might be possible that in such a simple setting which allows only a few number of moduli, it could get hard to consistently turn-on all the needed (geometric) fluxes.
For our simple type IIA setting we have six non-zero fluxes in the low energy dynamics, namely \(\{e_1, m_0, \textrm{H}_0, \textrm{H}^1, \hat{w}_{11}, \hat{w}_1{}^0\}\) and these are to be used for stabilizing six scalars fields. To be specific, there are three saxions \(\{D, \sigma , \rho \}\) and three axions \(\{\xi _0, \xi _1, \textrm{b}^1\}\). However, as we switch-off the F-term geometric fluxes in order to satisfy the Bianchi identities, and to avoid a possibly negative contribution to the scalar potential, we need to allow their presence only through the positive semidefinite D-term effects. Subsequently we end up in having the cohomology form of the Bianchi identities resulting in just a single non-trivial constraint. This also reduces the number of independent fluxes to five, which can be attributed to the root cause of having one axionic combination still flat in the end. So the observation that there is at least one axion combination unfixed due to BIs, one cannot afford to make any other fluxes to zero, in case some additional constraints on the remaining fluxes arise in an explicit model through the so-called missing Bianchi identities, which is unknown for the moment. Similar observations have been made for the type IIB models as well [110], which in the case of rigid compactification has resulted in a (partial) restoration of the no-scale structure even in the presence of non-geometric fluxes [22]. To investigate the issue of missing Bianchi identities is beyond the scope of the current plan as the main tasks and goals in this work have been limited to follow a balanced approach in the search of finding stable de-Sitter solutions for integer fluxes, and if such a candidate model is found, then to enumerate the possible loopholes for future refinements!
4 Summary and conclusions
In this work we have presented some simple and explicit type IIA models for exploring the possibilities of realizing tachyon-free (stable) AdS/dS solutions, and using the dictionary of [21, 105], the T-dual counterpart in type IIB setting can be consistently realized. In our type IIA orientifold model, we include the so-called geometric flux along with the usual NS–NS three-form flux \(\textrm{H}_3\) and the RR p-form fluxes \(\textrm{F}_p\) for \(p \in \{0, 2, 4, 6\}\). First we have presented the simple form of the four-dimensional type IIA scalar potential as given in Eqs. (2.2) which has been subsequently used for exploring the possible scenario that could evade the well known dS no-go theorems of a geometric type IIA setup. We have engineered the flux choice such that:
-
Given that the de Sitter no-go results of type IIA models following from the volume/dilaton analysis can be evaded by simultaneously including the Romans mass term and geometric fluxes [2, 5], we consider Romans mass term \(m_0\) and (some of) the geometric flux to be always non-zero. To be specific, we make only those geometric fluxes non-zero which appears in the D-term effects and exploit the F-term geometric fluxes to satisfy the Bianchi identities so that not to loose a positive semidefinite contribute to the scalar potential.
-
As said above, all the known NS–NS Bianchi identities (of the cohomology formulation) are satisfied without nullifying any of the D-term fluxes which could be useful for uplifting purpose, given their positive semi-definite nature.
-
Some of the RR fluxes which couple to \(\textrm{H}_3\) flux and the geometric flux in the tadpole relation are set to zero. To be specific, these are the ones following from the two-form potential (\(F_2\)) and six-form potential (\(F_6\)) denoted as: \(m^a = 0\) and \(e_0 = 0\).
-
There is one flux \(|e_1|\) which does not receive an upper bound from the tadpole relation as it can couple only to non-geometric \(\textrm{Q}\)-flux (which we do not include in the current analysis), and hence this flux \(|e_1|\) can facilitate the realization of large volume, large complex-structure and weak string coupling VEVs for the AdS as well as dS solutions we have.
-
There is one combination of axions which remains flat, and it may be attributed to making too restrictive choice of fluxes for various aforesaid reasons.
To summarise, we have presented a class of type IIA model with stable AdS/dS solutions and have argued about their viability under the so-called missing Bianchi identities [107, 111], which still remains an open issue to be explored, and can lead to extra constraints which may or may not rule out the de Sitter solutions we have found. However, settling the issue of missing Bianchi identities is beyond the scope of the current plan and we leave that for a future work.
Data Availability Statement
This manuscript has no associated data or the data will not be deposited. [Authors’ comment: The relevant information about all the necessary data has been included within the manuscript.]
Notes
For completeness, we present the generic scalar potential (A.2) and its simpler formulations in the Appendix A.
Given the fact that splitting of the \(h^{2,1}\) index in \(\{\hat{k}, \lambda \} \equiv \{0, k, \lambda \}\) is such that \(k + \lambda = h^{2,1}\), and so for our particular model, we take \(k =0\) and \(\lambda =1\). This means that the complex variables \(\textrm{N}^k\), which are like the so-called odd-moduli \(G^a\) in the dual Type IIB picture, will be absent along with the flux components involving the k-indices.
References
J.M. Maldacena, C. Nunez, Supergravity description of field theories on curved manifolds and a no go theorem. Int. J. Mod. Phys. A 16, 822–855 (2001). [182(2000)]. arXiv:hep-th/0007018
M.P. Hertzberg, S. Kachru, W. Taylor, M. Tegmark, Inflationary constraints on type IIA string theory. JHEP 12, 095 (2007). arXiv:0711.2512
M.P. Hertzberg, M. Tegmark, S. Kachru, J. Shelton, O. Ozcan, Searching for inflation in simple string theory models: an astrophysical perspective. Phys. Rev. D 76, 103521 (2007). arXiv:0709.0002
S.S. Haque, G. Shiu, B. Underwood, T. Van Riet, Minimal simple de Sitter solutions. Phys. Rev. D 79, 086005 (2009). arXiv:0810.5328
R. Flauger, S. Paban, D. Robbins, T. Wrase, Searching for slow-roll moduli inflation in massive type IIA supergravity with metric fluxes. Phys. Rev. D 79, 086011 (2009). arXiv:0812.3886
C. Caviezel, P. Koerber, S. Kors, D. Lust, T. Wrase, M. Zagermann, On the cosmology of type IIA compactifications on SU(3)-structure manifolds. JHEP 04, 010 (2009). arXiv:0812.3551
L. Covi, M. Gomez-Reino, C. Gross, J. Louis, G.A. Palma, C.A. Scrucca, de Sitter vacua in no-scale supergravities and Calabi–Yau string models. JHEP 06, 057 (2008). arXiv:0804.1073
B. de Carlos, A. Guarino, J.M. Moreno, Flux moduli stabilisation, supergravity algebras and no-go theorems. JHEP 01, 012 (2010). arXiv:0907.5580
C. Caviezel, T. Wrase, M. Zagermann, Moduli stabilization and cosmology of type IIB on SU(2)-structure orientifolds. JHEP 04, 011 (2010). arXiv:0912.3287
U.H. Danielsson, S.S. Haque, G. Shiu, T. Van Riet, Towards classical de Sitter solutions in string theory. JHEP 09, 114 (2009). arXiv:0907.2041
U.H. Danielsson, P. Koerber, T. Van Riet, Universal de Sitter solutions at tree-level. JHEP 05, 090 (2010). arXiv:1003.3590
T. Wrase, M. Zagermann, On classical de Sitter Vacua in string theory. Fortsch. Phys. 58, 906–910 (2010). arXiv:1003.0029
G. Shiu, Y. Sumitomo, Stability constraints on classical de Sitter Vacua. JHEP 09, 052 (2011). arXiv:1107.2925
J. McOrist, S. Sethi, M-theory and type IIA flux compactifications. JHEP 12, 122 (2012). arXiv:1208.0261
K. Dasgupta, R. Gwyn, E. McDonough, M. Mia, R. Tatar, de Sitter Vacua in type IIB string theory: classical solutions and quantum corrections. JHEP 07, 054 (2014). arXiv:1402.5112
F.F. Gautason, M. Schillo, T. Van Riet, M. Williams, Remarks on scale separation in flux vacua. JHEP 03, 061 (2016). arXiv:1512.00457
D. Junghans, Tachyons in classical de Sitter Vacua. JHEP 06, 132 (2016). arXiv:1603.08939
D. Andriot, J. Blåbäck, Refining the boundaries of the classical de Sitter landscape. JHEP 03, 102 (2017). [Erratum: JHEP03,083(2018)]. arXiv:1609.00385
D. Andriot, On classical de Sitter and Minkowski solutions with intersecting branes. JHEP 03, 054 (2018). arXiv:1710.08886
U.H. Danielsson, T. Van Riet, What if string theory has no de Sitter vacua? Int. J. Mod. Phys. D 27(12), 1830007 (2018). arXiv:1804.01120
P. Shukla, \(T\)-dualizing de Sitter no-go scenarios. Phys. Rev. D 102(2), 026014 (2020). arXiv:1909.08630
P. Shukla, Rigid nongeometric orientifolds and the swampland. Phys. Rev. D 103(8), 086010 (2021). arXiv:1909.10993
F. Marchesano, D. Prieto, J. Quirant, P. Shukla, Systematics of Type IIA moduli stabilisation. JHEP 11, 113 (2020). arXiv:2007.00672
H. Ooguri, C. Vafa, On the geometry of the string landscape and the swampland. Nucl. Phys. B 766, 21–33 (2007). arXiv:hep-th/0605264
G. Obied, H. Ooguri, L. Spodyneiko, C. Vafa, De Sitter space and the swampland. arXiv:1806.08362
D. Andriot, L. Horer, P. Marconnet, Charting the landscape of (anti-) de Sitter and Minkowski solutions of 10d supergravities. arXiv:2201.04152
S. Kachru, R. Kallosh, A.D. Linde, S.P. Trivedi, De Sitter vacua in string theory. Phys. Rev. D 68, 046005 (2003). arXiv:hep-th/0301240
C.P. Burgess, R. Kallosh, F. Quevedo, De Sitter string vacua from supersymmetric D terms. JHEP 10, 056 (2003). arXiv:hep-th/0309187
A. Achucarro, B. de Carlos, J.A. Casas, L. Doplicher, De Sitter vacua from uplifting D-terms in effective supergravities from realistic strings. JHEP 06, 014 (2006). arXiv:hep-th/0601190
A. Westphal, de Sitter string vacua from Kahler uplifting. JHEP 03, 102 (2007). arXiv:hep-th/0611332
E. Silverstein, Simple de Sitter solutions. Phys. Rev. D 77, 106006 (2008). arXiv:0712.1196
M. Rummel, A. Westphal, A sufficient condition for de Sitter vacua in type IIB string theory. JHEP 01, 020 (2012). arXiv:1107.2115
M. Cicoli, A. Maharana, F. Quevedo, C.P. Burgess, De Sitter string Vacua from dilaton-dependent non-perturbative effects. JHEP 06, 011 (2012). arXiv:1203.1750
J. Louis, M. Rummel, R. Valandro, A. Westphal, Building an explicit de Sitter. JHEP 10, 163 (2012). arXiv:1208.3208
M. Cicoli, D. Klevers, S. Krippendorf, C. Mayrhofer, F. Quevedo, R. Valandro, Explicit de Sitter flux vacua for global string models with chiral matter. JHEP 05, 001 (2014). arXiv:1312.0014
M. Cicoli, F. Quevedo, R. Valandro, De Sitter from T-branes. JHEP 03, 141 (2016). arXiv:1512.04558
M. Cicoli, I. García-Etxebarria, C. Mayrhofer, F. Quevedo, P. Shukla, R. Valandro, Global orientifolded quivers with inflation. JHEP 11, 134 (2017). arXiv:1706.06128
Y. Akrami, R. Kallosh, A. Linde, V. Vardanyan, The landscape, the Swampland and the era of precision cosmology. Fortsch. Phys. 67(1–2), 1800075 (2019). arXiv:1808.09440
I. Antoniadis, Y. Chen, G.K. Leontaris, Perturbative moduli stabilisation in type IIB/F-theory framework. Eur. Phys. J. 78(9), 766 (2018). arXiv:1803.08941
I. Antoniadis, Y. Chen, G.K. Leontaris, Inflation from the internal volume in type IIB/F-theory compactification. Int. J. Mod. Phys. A 34(08), 1950042 (2019). arXiv:1810.05060
I. Antoniadis, Y. Chen, G.K. Leontaris, Logarithmic loop corrections, moduli stabilisation and de Sitter vacua in string theory. arXiv:1909.10525
V. Basiouris, G.K. Leontaris, Note on de Sitter vacua from perturbative and non-perturbative dynamics in type IIB/F-theory compactifications. Phys. Lett. B 810, 135809 (2020). arXiv:2007.15423
I. Antoniadis, O. Lacombe, G.K. Leontaris, Inflation near a metastable de Sitter vacuum from moduli stabilisation. Eur. Phys. J. C 80(11), 1014 (2020). arXiv:2007.10362
M. Cicoli, S. De Alwis, A. Maharana, F. Muia, F. Quevedo, De Sitter vs quintessence in string theory. Fortsch. Phys. 67(1–2), 1800079 (2019). arXiv:1808.08967
C. Crinò, F. Quevedo, R. Valandro, On de Sitter String Vacua from anti-D3-branes in the large volume scenario. JHEP 03, 258 (2021). arXiv:2010.15903
M. Cicoli, I.N.G. Etxebarria, F. Quevedo, A. Schachner, P. Shukla, R. Valandro, The Standard Model quiver in de Sitter string compactifications. JHEP 08, 109 (2021). arXiv:2106.11964
J.J. Heckman, C. Lawrie, L. Lin, J. Sakstein, G. Zoccarato, Pixelated dark energy. arXiv:1901.10489
J.J. Heckman, C. Lawrie, L. Lin, G. Zoccarato, F-theory and dark energy. arXiv:1811.01959
U.H. Danielsson, S.S. Haque, P. Koerber, G. Shiu, T. Van Riet, T. Wrase, De Sitter hunting in a classical landscape. Fortsch. Phys. 59, 897–933 (2011). arXiv:1103.4858
X. Chen, G. Shiu, Y. Sumitomo, S.H.H. Tye, A global view on the search for de-Sitter Vacua in (type IIA) string theory. JHEP 04, 026 (2012). arXiv:1112.3338
U.H. Danielsson, G. Shiu, T. Van Riet, T. Wrase, A note on obstinate tachyons in classical dS solutions. JHEP 03, 138 (2013). arXiv:1212.5178
S.K. Garg, C. Krishnan, Bounds on slow roll and the de Sitter Swampland. arXiv:1807.05193
P. Agrawal, G. Obied, P.J. Steinhardt, C. Vafa, On the cosmological implications of the string Swampland. Phys. Lett. B 784, 271–276 (2018). arXiv:1806.09718
D. Andriot, On the de Sitter swampland criterion. Phys. Lett. 785, 570–573 (2018). arXiv:1806.10999
D. Andriot, New constraints on classical de Sitter: flirting with the swampland. Fortsch. Phys. 67(1–2), 1800103 (2019). arXiv:1807.09698
F. Denef, A. Hebecker, T. Wrase, de Sitter swampland conjecture and the Higgs potential. Phys. Rev. D 98(8), 086004 (2018). arXiv:1807.06581
J.P. Conlon, The de Sitter swampland conjecture and supersymmetric AdS vacua. Int. J. Mod. Phys. A 33(29), 1850178 (2018). arXiv:1808.05040
C. Roupec, T. Wrase, de Sitter extrema and the swampland. Fortsch. Phys. 67(1–2), 1800082 (2019). arXiv:1807.09538
H. Murayama, M. Yamazaki, T.T. Yanagida, Do we live in the swampland? JHEP 12, 032 (2018). arXiv:1809.00478
K. Choi, D. Chway, C.S. Shin, The dS swampland conjecture with the electroweak symmetry and QCD chiral symmetry breaking. JHEP 11, 142 (2018). arXiv:1809.01475
K. Hamaguchi, M. Ibe, T. Moroi, The swampland conjecture and the Higgs expectation value. JHEP 12, 023 (2018). arXiv:1810.02095
Y. Olguin-Trejo, S.L. Parameswaran, G. Tasinato, I. Zavala, Runaway quintessence, out of the swampland. JCAP 1901(01), 031 (2019). arXiv:1810.08634
J.J. Blanco-Pillado, M.A. Urkiola, J.M. Wachter, Racetrack potentials and the de Sitter swampland conjectures. JHEP 01, 187 (2019). arXiv:1811.05463
C.-M. Lin, K.-W. Ng, K. Cheung, Chaotic inflation on the brane and the swampland criteria. Phys. Rev. D 100(2), 023545 (2019). arXiv:1810.01644
C. Han, S. Pi, M. Sasaki, Quintessence saves Higgs instability. Phys. Lett. B 791, 314–318 (2019). arXiv:1809.05507
M. Raveri, W. Hu, S. Sethi, Swampland conjectures and late-time cosmology. Phys. Rev. D 99(8), 083518 (2019). arXiv:1812.10448
K. Dasgupta, M. Emelin, E. McDonough, R. Tatar, Quantum corrections and the de Sitter swampland conjecture. JHEP 01, 145 (2019). arXiv:1808.07498
U. Danielsson, The quantum swampland. JHEP 04, 095 (2019). arXiv:1809.04512
S. Andriolo, G. Shiu, H. Triendl, T. Van Riet, G. Venken, G. Zoccarato, Compact G2 holonomy spaces from SU(3) structures. JHEP 03, 059 (2019). arXiv:1811.00063
K. Dasgupta, M. Emelin, M.M. Faruk, R. Tatar, de Sitter Vacua in the string landscape. arXiv:1908.05288
D. Andriot, Open problems on classical de Sitter solutions. Fortsch. Phys. 67(7), 1900026 (2019). arXiv:1902.10093
E. Palti, The swampland: introduction and review. Fortsch. Phys. 67(6), 1900037 (2019). arXiv:1903.06239
M. Cicoli, F.G. Pedro, G. Tasinato, Natural quintessence in string theory. JCAP 07, 044 (2012). arXiv:1203.6655
D. Junghans, LVS de Sitter Vacua are probably in the swampland. arXiv:2201.03572
A. Banerjee, H. Cai, L. Heisenberg, E.O. Colgáin, M.M. Sheikh-Jabbari, T. Yang, Hubble sinks in the low-redshift swampland. Phys. Rev. D 103(8), L081305 (2021). arXiv:2006.00244
B.-H. Lee, W. Lee, E.O. Colgáin, M.M. Sheikh-Jabbari, S. Thakur, Is local \(H_0\) at odds with dark energy EFT? arXiv:2202.03906
R. Blumenhagen, I. Valenzuela, F. Wolf, The swampland conjecture and F-term axion monodromy inflation. JHEP 07, 145 (2017). arXiv:1703.05776
R. Blumenhagen, D. Kläwer, L. Schlechter, F. Wolf, The refined swampland distance conjecture in Calabi–Yau moduli spaces. JHEP 06, 052 (2018). arXiv:1803.04989
R. Blumenhagen, Large field inflation/quintessence and the refined swampland distance conjecture. PoS CORFU2017, 175 (2018). arXiv:1804.10504
E. Palti, The weak gravity conjecture and scalar fields. JHEP 08, 034 (2017). arXiv:1705.04328
J.P. Conlon, S. Krippendorf, Axion decay constants away from the lamppost. JHEP 04, 085 (2016). arXiv:1601.00647
A. Hebecker, P. Henkenjohann, L.T. Witkowski, Flat monodromies and a moduli space size conjecture. JHEP 12, 033 (2017). arXiv:1708.06761
D. Klaewer, E. Palti, Super-Planckian spatial field variations and quantum gravity. JHEP 01, 088 (2017). arXiv:1610.00010
F. Baume, E. Palti, Backreacted axion field ranges in string theory. JHEP 08, 043 (2016). arXiv:1602.06517
A. Landete, G. Shiu, Mass hierarchies and dynamical field range. Phys. Rev. D 98(6), 066012 (2018). arXiv:1806.01874
M. Cicoli, D. Ciupke, C. Mayrhofer, P. Shukla, A geometrical upper bound on the inflaton range. JHEP 05, 001 (2018). arXiv:1801.05434
A. Font, A. Herráez, L.E. Ibáñez, The swampland distance conjecture and towers of tensionless branes. JHEP 08, 044 (2019). arXiv:1904.05379
T.W. Grimm, C. Li, E. Palti, Infinite distance networks in field space and charge orbits. JHEP 03, 016 (2019). arXiv:1811.02571
A. Hebecker, D. Junghans, A. Schachner, Large field ranges from aligned and misaligned winding. JHEP 03, 192 (2019). arXiv:1812.05626
A. Banlaki, A. Chowdhury, C. Roupec, T. Wrase, Scaling limits of dS vacua and the swampland. JHEP 03, 065 (2019). arXiv:1811.07880
D. Junghans, Weakly coupled de Sitter Vacua with fluxes and the swampland. JHEP 03, 150 (2019). arXiv:1811.06990
D. Junghans, O-Plane backreaction and scale separation in Type IIA flux vacua. Fortsch. Phys. 68(6), 2000040 (2020). arXiv:2003.06274
F. Apers, M. Montero, T. Van Riet, T. Wrase, Comments on classical AdS flux vacua with scale separation. arXiv:2202.00682
I. Bena, J. Blåbäck, M. Graña, S. Lüst, The tadpole problem. JHEP 11, 223 (2021). arXiv:2010.10519
E. Plauschinn, The tadpole conjecture at large complex-structure. arXiv:2109.00029
E. Plauschinn, Moduli stabilization with non-geometric fluxes: comments on tadpole contributions and de-Sitter vacua. Fortsch. Phys. 69(3), 2100003 (2021). arXiv:2011.08227
F. Marchesano, D. Prieto, M. Wiesner, F-theory flux vacua at large complex structure. JHEP 08, 077 (2021). arXiv:2105.09326
G. Aldazabal, P.G. Camara, A. Font, L. Ibanez, More dual fluxes and moduli fixing. JHEP 0605, 070 (2006). arXiv:hep-th/0602089
B. de Carlos, A. Guarino, J.M. Moreno, Complete classification of Minkowski vacua in generalised flux models. JHEP 1002, 076 (2010). arXiv:0911.2876
G. Aldazabal, E. Andres, P.G. Camara, M. Grana, U-dual fluxes and generalized geometry. JHEP 11, 083 (2010). arXiv:1007.5509
D.M. Lombardo, F. Riccioni, S. Risoli, \(P\) fluxes and exotic branes. JHEP 12, 114 (2016). arXiv:1610.07975
D.M. Lombardo, F. Riccioni, S. Risoli, Non-geometric fluxes & tadpole conditions for exotic branes. JHEP 10, 134 (2017). arXiv:1704.08566
M. Grana, J. Louis, D. Waldram, SU(3) x SU(3) compactification and mirror duals of magnetic fluxes. JHEP 04, 101 (2007). arXiv:hep-th/0612237
I. Benmachiche, T.W. Grimm, Generalized N = 1 orientifold compactifications and the Hitchin functionals. Nucl. Phys. B 748, 200–252 (2006). arXiv:hep-th/0602241
P. Shukla, Dictionary for the type II nongeometric flux compactifications. Phys. Rev. D 103(8), 086009 (2021). arXiv:1909.07391
J. Shelton, W. Taylor, B. Wecht, Nongeometric flux compactifications. JHEP 0510, 085 (2005). arXiv:hep-th/0508133
M. Ihl, D. Robbins, T. Wrase, Toroidal orientifolds in IIA with general NS-NS fluxes. JHEP 0708, 043 (2007). arXiv:0705.3410
G. Aldazabal, P.G. Camara, J. Rosabal, Flux algebra, Bianchi identities and Freed–Witten anomalies in F-theory compactifications. Nucl. Phys. B 814, 21–52 (2009). arXiv:0811.2900
D. Robbins, T. Wrase, D-terms from generalized NS-NS fluxes in type II. JHEP 0712, 058 (2007). arXiv:0709.2186
P. Shukla, Revisiting the two formulations of Bianchi identities and their implications on moduli stabilization. JHEP 08, 146 (2016). arXiv:1603.08545
X. Gao, P. Shukla, R. Sun, On missing Bianchi identities in cohomology formulation. Eur. Phys. J. C 79(9), 781 (2019). arXiv:1805.05748
R. Blumenhagen, A. Font, M. Fuchs, D. Herschmann, E. Plauschinn, Towards axionic starobinsky-like inflation in string theory. Phys. Lett. B 746, 217–222 (2015). arXiv:1503.01607
R. Blumenhagen, A. Font, M. Fuchs, D. Herschmann, E. Plauschinn, Y. Sekiguchi, F. Wolf, A flux-scaling scenario for high-scale moduli stabilization in string theory. Nucl. Phys. B 897, 500–554 (2015). arXiv:1503.07634
R. Blumenhagen, A. Font, M. Fuchs, D. Herschmann, E. Plauschinn, Large field inflation and string moduli stabilization. PoS PLANCK2015, 021 (2015). arXiv:1510.04059
R. Blumenhagen, C. Damian, A. Font, D. Herschmann, R. Sun, The flux-scaling scenario: De Sitter uplift and axion inflation. Fortsch. Phys. 64(6–7), 536–550 (2016). arXiv:1510.01522
T. Li, Z. Li, D.V. Nanopoulos, Helical phase inflation via non-geometric flux compactifications: from natural to starobinsky-like inflation. JHEP 10, 138 (2015). arXiv:1507.04687
P. Betzler, E. Plauschinn, Type IIB flux vacua and tadpole cancellation. arXiv:1905.08823
T.R. Taylor, C. Vafa, R R flux on Calabi–Yau and partial supersymmetry breaking. Phys. Lett. B 474, 130–137 (2000). arXiv:hep-th/9912152
R. Blumenhagen, D. Lust, T.R. Taylor, Moduli stabilization in chiral type IIB orientifold models with fluxes. Nucl. Phys. B 663, 319–342 (2003). arXiv:hep-th/0303016
T.W. Grimm, J. Louis, The effective action of type IIA Calabi–Yau orientifolds. Nucl. Phys. B 718, 153–202 (2005). arXiv:hep-th/0412277
T.W. Grimm, J. Louis, The effective action of N = 1 Calabi–Yau orientifolds. Nucl. Phys. B 699, 387–426 (2004). arXiv:hep-th/0403067
F. Denef, M.R. Douglas, B. Florea, A. Grassi, S. Kachru, Fixing all moduli in a simple f-theory compactification. Adv. Theor. Math. Phys. 9, 861–929 (2005). arXiv:hep-th/0503124
M. Grana, Flux compactifications in string theory: a comprehensive review. Phys. Rep. 423, 91–158 (2006). arXiv:hep-th/0509003
V. Balasubramanian, P. Berglund, J.P. Conlon, F. Quevedo, Systematics of moduli stabilisation in Calabi–Yau flux compactifications. JHEP 03, 007 (2005). arXiv:hep-th/0502058
R. Blumenhagen, B. Kors, D. Lust, S. Stieberger, Four-dimensional string compactifications with D-Branes, orientifolds and fluxes. Phys. Rep. 445, 1–193 (2007). arXiv:hep-th/0610327
M.R. Douglas, S. Kachru, Flux compactification. Rev. Mod. Phys. 79, 733–796 (2007). arXiv:hep-th/0610102
R. Blumenhagen, S. Moster, E. Plauschinn, Moduli stabilisation versus chirality for MSSM like type IIB orientifolds. JHEP 01, 058 (2008). arXiv:0711.3389
M. Ihl, T. Wrase, Towards a realistic type IIA T**6/Z(4) orientifold model with background fluxes. Part 1. Moduli stabilization. JHEP 07, 027 (2006). arXiv:hep-th/0604087
A. Font, A. Guarino, J.M. Moreno, Algebras and non-geometric flux vacua. JHEP 0812, 050 (2008). arXiv:0809.3748
A. Guarino, G.J. Weatherill, Non-geometric flux vacua, S-duality and algebraic geometry. JHEP 0902, 042 (2009). arXiv:0811.2190
U. Danielsson, G. Dibitetto, On the distribution of stable de Sitter vacua. JHEP 1303, 018 (2013). arXiv:1212.4984
J. Blåbäck, U. Danielsson, G. Dibitetto, Fully stable dS vacua from generalised fluxes. JHEP 1308, 054 (2013). arXiv:1301.7073
C. Damian, O. Loaiza-Brito, More stable de Sitter vacua from S-dual nongeometric fluxes. Phys. Rev. D 88(4), 046008 (2013). arXiv:1304.0792
C. Damian, L.R. Diaz-Barron, O. Loaiza-Brito, M. Sabido, Slow-roll inflation in non-geometric flux compactification. JHEP 1306, 109 (2013). arXiv:1302.0529
F. Hassler, D. Lust, S. Massai, On inflation and de Sitter in non-geometric string backgrounds. Fortsch. Phys. 65(10–11), 1700062 (2017). arXiv:1405.2325
R. Blumenhagen, E. Plauschinn, Towards universal axion inflation and reheating in string theory. Phys. Lett. B 736, 482–487 (2014). arXiv:1404.3542
J. Blåbäck, U.H. Danielsson, G. Dibitetto, S.C. Vargas, Universal dS vacua in STU-models. JHEP 10, 069 (2015). arXiv:1505.04283
J.-P. Derendinger, C. Kounnas, P.M. Petropoulos, F. Zwirner, Superpotentials in IIA compactifications with general fluxes. Nucl. Phys. B 715, 211–233 (2005). arXiv:hep-th/0411276
J.-P. Derendinger, C. Kounnas, P. Petropoulos, F. Zwirner, Fluxes and gaugings: N = 1 effective superpotentials. Fortsch. Phys. 53, 926–935 (2005). arXiv:hep-th/0503229
B. Wecht, Lectures on nongeometric flux compactifications. Class. Quantum Gravity 24, S773–S794 (2007). arXiv:0708.3984
G. Dall’Agata, G. Villadoro, F. Zwirner, Type-IIA flux compactifications and N = 4 gauged supergravities. JHEP 0908, 018 (2009). arXiv:0906.0370
G. Aldazabal, D. Marques, C. Nunez, J.A. Rosabal, On type IIB moduli stabilization and N = 4, 8 supergravities. Nucl. Phys. B 849, 80–111 (2011). arXiv:1101.5954
G. Aldazabal, W. Baron, D. Marques, C. Nunez, The effective action of double field theory. JHEP 1111, 052 (2011). arXiv:1109.0290
D. Geissbuhler, Double field theory and N = 4 gauged supergravity. JHEP 1111, 116 (2011). arXiv:1109.4280
M. Graña, D. Marques, Gauged double field theory. JHEP 1204, 020 (2012). arXiv:1201.2924
G. Dibitetto, J. Fernandez-Melgarejo, D. Marques, D. Roest, Duality orbits of non-geometric fluxes. Fortsch. Phys. 60, 1123–1149 (2012). arXiv:1203.6562
D. Andriot, A. Betz, \(\beta \)-supergravity: a ten-dimensional theory with non-geometric fluxes, and its geometric framework. JHEP 1312, 083 (2013). arXiv:1306.4381
D. Andriot, A. Betz, Supersymmetry with non-geometric fluxes, or a \(\beta \)-twist in generalized geometry and Dirac operator. JHEP 04, 006 (2015). arXiv:1411.6640
C.D.A. Blair, E. Malek, Geometry and fluxes of SL(5) exceptional field theory. JHEP 03, 144 (2015). arXiv:1412.0635
D. Andriot, O. Hohm, M. Larfors, D. Lust, P. Patalong, Non-geometric fluxes in supergravity and double field theory. Fortsch. Phys. 60, 1150–1186 (2012). arXiv:1204.1979
D. Geissbuhler, D. Marques, C. Nunez, V. Penas, Exploring double field theory. JHEP 06, 101 (2013). arXiv:1304.1472
R. Blumenhagen, X. Gao, D. Herschmann, P. Shukla, Dimensional oxidation of non-geometric fluxes in type II orientifolds. JHEP 1310, 201 (2013). arXiv:1306.2761
G. Villadoro, F. Zwirner, N = 1 effective potential from dual type-IIA D6/O6 orientifolds with general fluxes. JHEP 0506, 047 (2005). arXiv:hep-th/0503169
A. Ceresole, R. D’Auria, S. Ferrara, The symplectic structure of N = 2 supergravity and its central extension. Nucl. Phys. Proc. Suppl. 46, 67–74 (1996). arXiv:hep-th/9509160
R. D’Auria, S. Ferrara, M. Trigiante, On the supergravity formulation of mirror symmetry in generalized Calabi–Yau manifolds. Nucl. Phys. B 780, 28–39 (2007). arXiv:hep-th/0701247
P. Shukla, A symplectic rearrangement of the four dimensional non-geometric scalar potential. JHEP 11, 162 (2015). arXiv:1508.01197
X. Gao, P. Shukla, R. Sun, Symplectic formulation of the type IIA nongeometric scalar potential. Phys. Rev. D 98(4), 046009 (2018). arXiv:1712.07310
P. Shukla, Reading off the nongeometric scalar potentials via the topological data of the compactifying Calabi–Yau manifolds. Phys. Rev. D 94(8), 086003 (2016). arXiv:1603.01290
X. Gao, P. Shukla, Dimensional oxidation and modular completion of non-geometric type IIB action. JHEP 1505, 018 (2015). arXiv:1501.07248
P. Shukla, On modular completion of generalized flux orbits. JHEP 11, 075 (2015). arXiv:1505.00544
P. Shukla, Implementing odd-axions in dimensional oxidation of 4D non-geometric type IIB scalar potential. Nucl. Phys. B 902, 458-482 (2016). arXiv:1507.01612
D. Andriot, O. Hohm, M. Larfors, D. Lust, P. Patalong, A geometric action for non-geometric fluxes. Phys. Rev. Lett. 108, 261602 (2012). arXiv:1202.3060
D. Andriot, M. Larfors, D. Lust, P. Patalong, A ten-dimensional action for non-geometric fluxes. JHEP 1109, 134 (2011). arXiv:1106.4015
R. Blumenhagen, A. Font, E. Plauschinn, Relating double field theory to the scalar potential of N = 2 gauged supergravity. JHEP 12, 122 (2015). arXiv:1507.08059
E. Plauschinn, Non-geometric backgrounds in string theory. Phys. Rep. 798, 1–122 (2019). arXiv:1811.11203
O. DeWolfe, A. Giryavets, S. Kachru, W. Taylor, Type IIA moduli stabilization. JHEP 07, 066 (2005). arXiv:hep-th/0505160
P. Narayan, S.P. Trivedi, On the stability of non-supersymmetric AdS Vacua. JHEP 07, 089 (2010). arXiv:1002.4498
Acknowledgements
I would like to thank Fernando Marchesano, David Prieto and Joan Quirant for useful discussions, and collaboration at the initial stage of this project. In addition, I am thankful to Paolo Creminelli, Atish Dabholkar and Fernando Quevedo for their support.
Author information
Authors and Affiliations
Corresponding author
Appendix A: Type IIA scalar potential with geometric flux
Appendix A: Type IIA scalar potential with geometric flux
In the absence of any non-geometric fluxes, the geometric type IIA scalar potential can be encoded in a set of terms given as below [22, 105],
where
where the various non-zero “axionic flux orbits” can be written in the following form,
This scalar potential can be studied for the searching the stable vacua through minimization of the moduli/axions, however one can consider the two-field volume/dilaton analysis to rule out certain scenarios [2, 5]. In a more general analysis, one can also include the complex structure moduli in order to further check the de-Sitter solutions allowed by the volume/dilaton analysis. Let us also note that the fluxes allowed by the orientifold projection will be further constrained by the following Bianchi identities,
We consider the type IIA setup with geometric flux such that fluxes with k-indices are absent. This is equivalent to not having any odd-moduli \(G^a\) in the dual type IIB theory [21, 105].
For that purpose, we further introduce two new moduli, namely \(\rho \) and \(\sigma \) via a redefinition in the overall volume (\({{\mathcal {V}}}\)) of the Calabi Yau threefold and its mirror volume \({{\mathcal {U}}}\) by considering the two-cycle volume moduli \(\mathrm t^a\) and \(\mathrm z^i\) as
where \(\gamma ^a\)’s denote the angular Kähler moduli while \(\theta ^\lambda \)’s corresponds to the angular Kähler moduli on the mirror Calabi Yau threefold. Now we can extract the volume factor \(\rho \) from the Kähler moduli space metric and its inverse in the following way,
Here the matrix \(\tilde{g}_{ab}\) and its inverse \(\tilde{g}^{ab}\) do not depend on \(\rho \) modulus. Similarly, the matrices \(\tilde{g}_{\lambda \rho }, \, \tilde{g}^{\lambda \rho },\, \tilde{g}_{ij}\) and \(\tilde{g}^{ij}\) do not depend on the analogous complex structure modulus \(\sigma \). Using these new redefinitions the explicit dependence of the \(\rho \) and \(\sigma \) moduli can be extracted out from the generic type IIA scalar potential pieces given in Eq. (A.2) takes the form given in Eq. (2.2), where \(A_i\)’s are some functions of fluxes and moduli other than volume modulus \(\rho \), the complex structure modulus \(\sigma \) and the 4-dimensional dilaton D. For completeness, the explicit expressions of \(A_i\)’s are given below,
This shows that all the \(A_i\)’s except \(A_9,\, A_{10}, \, A_{12}\) and \(A_{13}\) are positive semi-definite.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
Funded by SCOAP3. SCOAP3 supports the goals of the International Year of Basic Sciences for Sustainable Development.
About this article

Cite this article
Shukla, P. On stable type IIA de-Sitter vacua with geometric flux. Eur. Phys. J. C 83, 196 (2023). https://doi.org/10.1140/epjc/s10052-023-11361-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjc/s10052-023-11361-w