
Abstract
In symmetric teleparallel gravities, where the independent connection is characterized by nonmetricity while curvature and torsion are zero, it is possible to find a coordinate system whereby the connection vanishes globally and covariant derivatives reduce to partial derivatives – the coincident gauge. In this paper we derive general transformation rules into the coincident gauge for spacetime configurations where the both the metric and connection are static and spherically symmetric, and write out the respective form of the coincident gauge metrics. Taking different options in fixing the freedom in the connection allowed by the symmetry and the field equations, the Schwarzschild metric in the coincident gauge can take for instance the Cartesian, Kerr–Schild, and diagonal (isotropic-like) forms, while the BBMB black hole metric in symmetric teleparallel scalar–tensor theory a certain diagonal form fits the coincident gauge requirements but the Cartesian and Kerr–Schild forms do not. Different connections imply different value for the boundary term which could in principle be physically relevant, but simple arguments about the coincident gauge do not seem to be sufficient to fix the connection uniquely. As a byproduct of the investigation we also point out that only a particular subset of static spherically symmetric connections has vanishing nonmetricity in the Minkowski limit.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
It is an elementary textbook maxim that when going from the special relativity formulae in Cartesian coordinates of Minkowski space into the general relativity (GR) expressions in the language of Riemannian geometry, the partial derivatives shall be promoted to covariant derivatives. The procedure introduces Levi-Civita affine connection given as Christoffel symbols, which are mathematically defined as the derivatives of the basis vectors, and physically represent the inertial and gravitational forces experienced by a particle (indistinguishable by the virtue of the equivalence principle). On a Riemannian manifold it is always possible to make a transformation into the normal coordinates, where the affine connection vanishes at a single point. At this point the covariant derivatives reduce to the partial derivatives and the geodesic motion of a particle exhibits no acceleration. Despite the economy achieved by the vanishing connection, practical computations in the normal coordinates are not necessarily simpler, since the metric could obtain a rather cumbersome form instead. These properties are inherited by the extended theories like \(f({\mathop {R}\limits ^{\circ }})\) and scalar–tensor gravity as well, as ingrained in the Riemannian geometry.
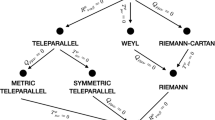
The state of affairs gets more interesting, however, in the non-Riemannian framework where the affine connection is taken to be independent of the metric, and thus besides curvature can be characterized by torsion and nonmetricity as well. Assuming flatness, i.e., that the curvature vanishes, i.e., the geometry is teleparallel (as the orientation of parallel transported vectors does not change), poses no obstacle for a meaningful theory of gravity. In the contrary, since the Levi-Civita curvature scalar \({\mathop {R}\limits ^{\circ }}\) of the Einstein–Hilbert action can be rewritten in terms of the torsion scalar T and a boundary term \(B_T\), or the nonmetricity scalar Q and a boundary term \(B_Q\), the dynamical content of GR can be transplanted into the setting of metric teleparallelism (with zero curvature and zero nonmetricity) or symmetric teleparallelism (with zero curvature and zero torsion). The respective theories are known as the teleparallel equivalent of general relativity (TEGR) [1, 2] and symmetric teleparallel equivalent of general relativity (STEGR) [3, 4], which together with GR form a “geometrical trinity of gravity” [5, 6], or rather inhabit a full circle of equivalent theories [7]. Analogously to the Riemannian case, the teleparallel theories can be extended by considering a gravitational action depending on a general function of the ruling geometric quantity like f(T) [8,9,10,11] or f(Q) [4, 12] gravity, or by introducing a nonminimal coupling between a scalar field and this quantity, thus yielding the scalar–tensor versions of teleparallel gravity [13, 14] and symmetric teleparallel gravity [15]. More elaborate extensions have been considered as well (see Ref. [16] for a comprehensive review). In general the field equations of these extended theories are different from their counterparts in the extensions of the original formulation of GR, thus providing an entirely new landscape for study and investigation. In this paper, we will be focused on studying the symmetric teleparallel framework where only non-metricity is present.
The extra non-Riemannian freedom in connection leads to a theorem that in the case of zero curvature and zero nonmetricity, the connection can be made to vanish globally in a set of anholonomic (local Lorentz) frames, while in the case of zero curvature and zero torsion in a set of holonomic frames [17]. In other words, metric teleparallelism allows a global tetrad field whereby the associated spin connection vanishes, and symmetric teleparallelism allows a coordinate system whereby the affine connection vanishes everywhere on a manifold, not just at a point. In the literature the former is often called a “Weitzenböck gauge”, while following Ref. [4] the latter is known as a “coincident gauge”, since the vanishing of the connection makes the covariant and partial derivatives to coincide.
In the metric (torsional) version of teleparallelism, the Weitzenböck gauge tetrad ansatz for a static spherically symmetric spacetime was first found by carefully solving the field equations in extended f(T) gravity [18, 19], and only later it was realized that in this form the tetrad, and consequently the independent connection obeys the same symmetry as the metric [20]. Similarly, the initially found Weitzenböck gauge solutions of rotating tetrads [21, 22] were later seen to belong to the two axially symmetric branches of connections [20], out of which only one branch has a proper spherically symmetric limit [23]. Thus the assumption of the connection being endowed with the same symmetry as the metric seems a useful premise in approaching the field configurations.
The torsional version of teleparallel gravity has been studied in different physical situations but the family of symmetric (nonmetricity) teleparallel gravities is less explored, and only a few examples of the coincident gauge have been explicitly written down. It was noticed from early on that besides the obvious Minkowski case the spatially flat Friedmann–Lemaître–Robertson–Walker metric in Cartesian coordinates is compatible with vanishing connection [4]. Actually, asking the connection to obey the cosmological symmetry of isotropy and homogeneity yields three different sets of connections for the spatially flat case and one set for the spatially hyperbolic and spherical geometries [24, 25] (all showing different phenomenology [26]), while only for one of the spatially flat sets going to the coincident gauge reduces to the reparametrization of the time coordinate, i.e. is congruent with the Cartesian coordinates [24]. These results also hold in the reverse order, i.e. first assuming a coincident gauge and then imposing the symmetry of the connection [27]. For static spherically symmetric spacetime the usual spherical coordinates are not consistent with the coincident gauge [28, 29], while the Cartesian [28, 29] and Kerr–Schild [30, 31] coordinates can be compatible with the vanishing connection.
In this paper we aim to further the understanding of the coincident gauge and derive the corresponding general transformation rules as well as the respective metrics for static spherically symmetric field configurations. We assume that both the metric and connection obey the same symmetry, and start from the two sets of curvature and torsion-free connections worked out recently [32]. In Sect. 2 we give a brief introduction to symmetric teleparallel gravity and also provide the action and field equations for a class of scalar–tensor theory based on a non-minimal coupling between a scalar field and the nonmetricity scalar. We elaborate the implications of the coincident gauge as well. Section 3 is devoted to explain static spherical symmetry for any generic theory based in symmetric teleparallel gravity by assuming that the connection is also spherically symmetric. The most central part of the paper is presented in Sect. 4 where we solve the coincident gauge transformations for the different sets and give the general form of the respective coincident gauge metrics. In Sect. 5 we point out that only a specific branch of the spherical static connections has vanishing nonmetricity in the Minkowski limit, and focus on this branch in the subsequent explicit examples. To illustrate the results we consider the Schwarzschild solution in Sect. 6 and show that Cartesian, Kerr–Schild, as well as isotropic-like coordinates can fit coincident gauge, but each of these choices fixes the original freedom in the connection differently. As the second example we take the so-called BBMB solution in symmetric teleparallel scalar–tensor theory, and find that neither Cartesian nor Kerr–Schild coordinates can provide the coincident gauge, but certain isotropic coordinates do. Finally, we give a brief conclusion about our main findings in Sect. 8.
Our convention is the following: we use units where \(c=1\) and the metric signature \((-,+,+,+)\). We denote Levi-Civita quantities (Riemannian) with a circle on top \(\circ \) and quantities without any symbol would be refer to be symmetric teleparallel gravity.
2 Symmetric teleparallel gravities
Symmetric teleparallel gravity assumes a geometric setup where the connection is characterized by identically vanishing curvature and torsion, while only nonmetricity is left to carry nontrivial information. The action can be constructed from the nonmetricity scalar which is equivalent to the Levi-Civita Ricci scalar up to a boundary term, thus providing a link to GR. It is a special property of these geometries that there exists a system of coordinates where the connection can be made to vanish globally, a so-called coincident gauge.
2.1 Geometric preliminaries
A generic connection \({\tilde{\Gamma }}{}^{\lambda }_{\mu \nu }\) with 64 independent components can be decomposed into three parts, [33, 34]
namely the Levi-Civita connection of the metric \(g_{\mu \nu }\),
contortion tensor
and disformation tensor
Here contortion is built from torsion tensors
while disformation is constructed from nonmetricity tensors
The latter two along with curvature tensor
are the three key properties that characterize a connection. When curvature is zero, the orientation of vectors does not change under parallel transport along a curve. When torsion is zero, the connection is symmetric in the lower indices. Hence the imposition of vanishing curvature and torsion warrants the name “symmetric teleparallel”, and we denote it by \({\Gamma }{}^{\lambda }_{\mu \nu }\).
It is an interesting property of the connection \({\Gamma }{}^{\lambda }_{\mu \nu }\) that the scalar curvature of the Levi-Civita part of the connection, \({\mathop {R}\limits ^{\circ }}\), can be expressed as the sum of a nonmetricity scalar and a Levi-Civita divergence acting over the two independent traces of the nonmetricity tensor,
where the nonmetricity scalar and traces are defined as
It is also significant that the total divergence part in (8),
becomes a boundary term under a spacetime integral.
2.2 Action and field equations
As the Einstein–Hilbert action of GR is given by the Levi-Civita curvature scalar \({\mathop {R}\limits ^{\circ }}\), we can rewrite that action using the nonmetricity scalar Q instead, and expect to keep the same dynamical content since the boundary term does not affect the field equations. This is the idea behind symmetric teleparallel equivalent of general relatvity. Various extensions of the symmetric teleparallel theory like substituting Q in the action by f(Q) or introducing a nonminimal coupling between Q and a scalar field \(\Phi \), however, lead to theories that are different from their counterparts \(f({\mathop {R}\limits ^{\circ }})\) and scalar–tensor gravity originally formulated in the Riemannian geometry.
A relatively simple, but still versatile extended symmetric teleparallel action can be written as [15]
where \(\kappa ^2=8\pi G\) and \(S_{\textrm{m}}\) denotes the action of matter (which we assume to be the same as in GR, i.e. depending on the metric alone). Like in the usual Riemannian scalar–tensor theory the nonminimal coupling function \({\mathcal {A}}\) sets the strength of the effective gravitational constant, \({\mathcal {B}}\) is the kinetic coupling function, and \({\mathcal {V}}\) is the scalar potential. If the nonminimal coupling function is fixed to unity, \({\mathcal {A}}(\Phi )\equiv 1\), and the kinetic and potential terms of the scalar field vanish, \({\mathcal {B}}(\Phi )\equiv {\mathcal {V}}(\Phi )\equiv 0\), the theory is reduced to a STEGR. If the nonminimal coupling function is unity, but and the kinetic term of the scalar field is nontrivial, then we have a theory that is equivalent to a minimally coupled scalar field in GR. In fact, also the better known f(Q) gravity can be viewed as a special subcase of the scalar–tensor action (12), as it can be obtained by setting [15]
where \(f_Q=df/dQ\).
With the help of introducing the so-called superpotential (or conjugate) tensor
as well as some geometric indentities the field equations arising from the variation of the action (12) with respect to the metric, symmetric teleparallel connection, and scalar field are [15, 35]
Here \({\mathop {G}\limits ^{\circ }}_{\mu \nu }\) is the Einstein tensor and \({\mathop {\square }\limits ^{\circ }}\) the d’Alembert operator computed of the Levi-Civita part of the connection, while \({\mathcal {T}}_{\mu \nu }\) is the usual matter energy–momentum tensor. When the scalar field is globally constant, the Eq. (15a) reduces to the Einstein’s equation in GR with the value of the potential playing the role of the cosmological constant, while (15b) and (15c) immediately vanish. Therefore, the solutions of GR are trivially also the solutions of these scalar–tensor theories with the scalar field being constant.
One can also notice that if the nonminimal coupling function \({\mathcal {A}}(\Phi )\) is constant, the connection field equation (15b) is identically satisfied and all contributions of the nonmetricity drop out in the remaining equations as well. Thus in the case of STEGR, the non-Riemannian part of the symmetric teleparallel connection is left completely undetermined by the field equations. This feature can be traced back to the identity (8), which implies that the difference between GR and STEGR is at most in the boundary term only. The boundary term does not concern the field equations, and thus the STEGR field equations can not contain anything extra to the GR field equations. As the GR field equations know only about the Riemannian part of the connection, the non-Riemannian part of the symmetric teleparallel connection can not emerge in the STEGR field equations either. However, it might still be possible to entertain some heuristic arguments that could be used in fixing the non-Riemannian part of the connection nevertheless, relevant in modified theories of gravity or in physical situations when the value of the action plays a role (such as in black hole entropy [31]).
2.3 Coincident gauge
The action (12) and the ensuing field equations are manifestly covariant, in the sense that under a general coordinate transformation from \(\xi ^\lambda \) into \(x^\lambda \) the metric and connection transform as usual
In particular, the quantities \({\mathop {R}\limits ^{\circ }}\), Q, and \(B_Q\) transform as scalars and retain their relationship (8).
A very interesting mathematical fact in the case of symmetric teleparallel geometry is that there exists a coordinate system where the connection vanishes globally on the manifold [17]. The authors of Ref. [4] have dubbed this system of coordinates a “coincident gauge”, since the vanishing of the connection makes the covariant and partial derivatives to coincide. Also then the nonmetricity tensor (6) reduces to the simple form of partial derivatives of the metric only. When the coordinate system corresponding to the coincident gauge is known, the transformation (16b) of the connection into any other coordinate system \(x^\alpha \) reduces to
where \(\xi ^\lambda \) are the coordinates of the coincident gauge with \(\Gamma ^\gamma {}_{\alpha \beta }(\xi ^\lambda )=0\). Similarly, by an inverse transformation of (16) it is possible from any other coordinate system to transform back into the coincident gauge (provided the determinant of the Jacobian is not zero).
The combined property that the non-Riemannian part of the connection is not determined by the STEGR field equations and that there exists a system of coordinates where the teleparallel connection vanishes may tempt one to entertain a noncovariant approach to STEGR by just imposing vanishing teleparallel connection in association with any metric. In this approach under the coordinate transformations one would only transform the metric (16a) while instead of (16b) the connection is kept always zero. (In analogy with the metric teleparallel case [36] one may speak of a “pure metric” approach to symmetric teleparallel gravity and call this a coordinate transformation of the 2nd kind). Transforming only the metric is equivalent to making a combined transformation (16) and on top of that only the connection transformation (inverse of (17)) to make the connection to vanish. While such transformations are consistent with the STEGR field equations, it is rather questionable whether they provide a true physical symmetry of the theory which relates physically equivalent configurations (as the usual coordinate transformations (16) do). Under the pure metric transformation (16a) the nonmetricity tensor would transform noncovariantly (since \(\partial _\rho g_{\mu \nu }\) is not a tensor), and the nonmetricity scalar would not remain at the same value but pick up an extra contribution in the form of an additional boundary term. Thus the relation (8) would be altered in the sense that \({\mathop {R}\limits ^{\circ }}\) and Q would be related to each other by a different boundary term before and after the transformation. The field equations would still assume the same covariant form, but any quantity that relies on the boundary term (like the black hole entropy) would report altered physics.
In our view Eq. (17) is rather a generating rule of a set of all possible symmetric teleparallel connections, where the connection corresponding to a particular physical configuration is one member. Indeed, for a given metric \(g_{\mu \nu }(x^\lambda )\) picking a set of all possible four functions \(\xi ^\alpha (x^\lambda )\) generates a set of all connections that have the property of being curvature and torsion-free. Connection components which are solutions of symmetric teleparallel field equations necessarily belong to this set. In STEGR this whole set is consistent with the field equations since the STEGR field equations leave the non-Riemannian part of the connection undetermined, while for the extended theories like scalar–tensor the field equations will in general fix the connection or at least constrain it to a particular subset of the curvature and torsion-free set. An obvious question remains how to fix the connection for a physical configuration when the field equations are not able to fully settle it? In the next section we are are going to see how the demand that the connection obeys the same symmetry as the metric which constrains the set a bit further. This provides the stage for a transformation into the coincident gauge, where different heuristic considerations can be tried out.
3 Static spherically symmetric metric and connection
In the spherical coordinates \(x^\mu =(t,r,\theta ,\phi )\) static and spherically symmetric spacetimes are characterized by the Killing vectors \(Z_\zeta \)
Imposing the symmetry means that the Lie derivatives of the metric and affine connection along these vectors vanish,
Note that we have extra imposed that the general affine connection respects the same symmetries as the metric tensor. For the metric this gives the well known result
where \(g_{tt}\), \(g_{rr}\) are two arbitrary functions of the radial coordinate and must be determined by the field equations of the theory at hand. General affine connection that obeys this symmetry, however, is parameterized by twenty functions \({\mathcal {C}}_n(r)\) in the form [37]
Here the notation should be understood as \({{\tilde{\Gamma }}}{}^{\rho }{}_{\mu \nu } = \left[ \begin{array}{cccc} {{\tilde{\Gamma }}}{}^{0}{}_{\mu \nu }&{{\tilde{\Gamma }}}{}^{1}{}_{\mu \nu }&{{\tilde{\Gamma }}}{}^{2}{}_{\mu \nu }&{{\tilde{\Gamma }}}{}^{3}{}_{\mu \nu } \end{array} \right] \) where in the four blocks the \(\mu \) and \(\nu \) indices label the rows and columns, respectively. Demading that the affine connection is curvature and torsion-free reduces the number of free functions considerably. It turns out there are two solutions, both having two independent functional freedoms left [32].
3.1 Connection set 1
The set 1 of static and spherically symmetric curvature and torsion-free connections is given by [32]
where the functions \(\Gamma ^{\phi }{}_{r \phi }\), \(\Gamma ^{t}{}_{rr}\), \(\Gamma ^{r}{}_{rr}\) depend on r, while c is a nonzero constant. The functions have to obey the relation
to satisfy vanishing curvature and torsion, hence overall there are two functional degrees of freedom.
3.2 Connection set 2
The set 2 of static and spherically symmetric curvature and torsion-free connections is given by [32]
where the functions \(\Gamma ^{t}{}_{\theta \theta }\), \(\Gamma ^{t}{}_{rr}\), \(\Gamma ^{r}{}_{\theta \theta }\), \(\Gamma ^{r}{}_{rr}\) also depend on r, while c and k are some constant parameters. The functions have to obey the relations
for vanishing curvature and torsion, hence again there are two functional degrees of freedom remaining in the game.
4 Coincident gauge transformations
If the coordinates of the coincident gauge \(\xi ^\lambda \) are known, it is possible to make a transformation (16) into any other coordinates \(x^\lambda \), while the connection transforms as (17). However, if we do not know the coincident gauge, we may rewrite Eq. (17) as
and use the known affine connection components in the other coordinates to solve the partial differential equations for the unknown functions \(\xi ^\rho (x^\lambda )\) which give the coincident gauge coordinates in terms of the known coordinates. As the requirement of static and spherical symmetry yielded two sets of connections we shall treat both of them separately. Unlinke the investigation in the cosmolgical case [24] we do not impose any particular ansatz to solve these equations. Note that to invert (17) we assumed that the transformation between the coordinate systems have the property that the determinant of the Jacobian is not zero or singular. Also it is worth to emphasise again that the coordinate transformations are independent of the action, therefore, the following computations are valid for any symmetric teleparallel theory.
4.1 Connection set 1
For the connection set 1 given by (22), the nontrivial equations (26) turn out to be
They are identical for each \(\xi ^\lambda (t,r,\theta ,\phi )\). The general solution of this system of partial differential equations can be written as
where \(\alpha ^\lambda , \beta ^\lambda , \gamma ^\lambda , \sigma ^\lambda \) are the integration constants. We have kept the indefinite integrals explicitly in the expression (28), so it is straightforward to take the derivatives and check that Eq. (26) is indeed satisfied for the affine connection components (22) and taking into account the relation (23). The solution (28) contains only two functions \(\Gamma ^{\phi }{}_{r \phi }\), \(\Gamma ^{r}{}_{rr}\), but the third function \(\Gamma ^{t}{}_{rr}\) would be generated into (22) via the condition (23).
The determinant of the Jacobian matrix is given by
where \(|| \alpha ^\lambda , \beta ^\lambda , \gamma ^\lambda , \sigma ^\lambda ||\) stands for a matrix composed of the columns of the integration constants. We see that the coincident gauge coordinates \(\xi ^\lambda \) are not determined uniquely, but any combination of the integration constants that does not make the Jacobian determinant zero or singular is a possible solution. All these possibilities are of course equivalent to each other in the sense that they are related to each other by some coordinate transformations, as they are all related to the spherical coordinates. Another interesting point is that the coincident coordinates in the static spherical symmetry case depend on the two independent affine connection components allowed by the assumption of zero curvature and torsion. These components remain completely undetermined in STEGR where the connection field equations vanish identically, but could get fixed or partially fixed by the nontrivial connection field equations in extended symmetric teleparallel theories. However the connection contributions appear as exponentiated integrals and are thus guaranteed not to alter the overall sign of the Jacobian determinant and reverse the orientation of the system of coordinates.
A minimal, and reasonable looking choice of integration constants could be \(\sigma ^0=\alpha ^1=\beta ^2=\gamma ^3=1\) and all the other zero, giving
We may immediately notice that the angular part of this coordinate transformation reminds the relationship between the Cartesian and spherical coordinates, while the time and radial coordinates do not exactly map to their expected Cartesian counterparts. To find that the coincident gauge coordinates resemble the Cartesian system should perhaps not come as a surprise, since in order to make the affine connection to vanish certain “straightening out” of the curvilinear nature of the original spherical coordinate system is probably unavoidable. We can invert the expressions (30) to get
where we have denoted
The function \(r(\xi _w)\) is the inverse of Eq. (30a) and thus inherits the properties like
etc., which must be remembered in the calculations. It is interesting that the time direction t in the spherical coordinates gets mixed into all four coordinates of the coincident gauge, since (31a) depends not only on \(\xi _w\) via \(\Gamma ^\phi {}_{r \phi }(r(\xi _w))\), but also on the “spatial” \(\xi _x, \xi _y, \xi _z\) via R.
To transform the metric and other tensors into the coincident gauge coordinates it is convenient to have the Jacobian matrices written out in these coordinates. Taking the derivatives, keeping in mind the properties (23) and (33), and inverting the matrix, we get
where \(\Gamma ^{\phi }{}_{r \phi }(r(\xi _w))\), \(r=r(\xi _w)\) and \(r'=\frac{dr}{d\xi _w}\). With these expressions it is easy to transform (16) the metric into the coincident gauge, resulting in
Similarly, the affine connection components (22) can be transformed (16) into the coincident gauge, giving the expected result
Note that the transformed metric in the coincident gauge contains now four independent functions, namely \(g_{tt}(r(\xi _w))\) and \(g_{rr}(r(\xi _w))\) which were in the metric before, as well as \(\Gamma ^{\phi }{}_{r \phi }(r(\xi _w))\) and \(r(\xi _w)\) which previously characterised the connection (the latter via the inverse of (30a)). Thus although the coordinate transformation into the coincident gauge cleared the affine connection components of all content, the same information got packed into the components of the metric tensor which took a much more complicated form as the result.
Although vanishing connection makes the covariant derivatives to reduce to the partial derivatives and certain simplifications take place, there seems to be no overall economic effect in using the coincident gauge expressions for practical computations. Actually the situation is quite the opposite. Despite zero connection, the nonmetricity tensor is full of nonvanishing components, and thus computing the nonmetricity trances and any further quantities present in the field equations becomes more involved. The reason is not that the all the free functions got packed into the metric, but that the main price of making the connection to vanish was to switch away from the coordinates that were adapted to the symmetry of the configuration, i.e. from the spherical coordinates to a sort of deformed Cartesian coordinates.
The nature of the coincident coordinates (30) can be illuminated further by transforming the Killing vectors (18) into the coincident gauge, which yields
In the form of the vectors \(R^\mu \), \(S^\mu \), \(T^\mu \) we can exactly recognize the Killing vectors of spherical symmetry as expressed in the Cartesian coordinates, but the vector \(K^\mu \) representing static time translation symmetry is quite unexpectedly orthogonal to the \(\xi _w\) direction. Therefore we can not entertain \(\xi _w\) as a coincident gauge analogue of time, rather the time is “smeared” among all the coordinates. Hence one should be alert that in general the physical interpretation of solutions in the coincident gauge can be tricky and problematic. However, one can still check explicitly that the the Lie derivatives (19) of the metric (36) in the directions specified by the Killing vectors (38) vanish, hence the transformed metric (36) possesses the same symmetry as the original metric (20) and connection (22). In a similar vein, the Lie derivatives of the transformed connection components (37) in the directions specified by the Killing vectors (38) vanish as well.
Taking the Minkowski limit of the original metric by letting \(g_{tt}\rightarrow 1\) and \(g_{rr}\rightarrow 1\) simplifies the form of of the coincident gauge metric (36). However, by closer inspection we may notice that no possible choice of the remaining functions \(\Gamma ^{\phi }{}_{r \phi }\) and \(\Gamma ^{r}{}_{rr}\) (the latter determines r) can take the Minkowski limit of (36) into the familiar form in the Cartesian coordinates \(\eta _{\mu \nu }=\text {diag}(-1,1,1,1)\). At this point it is not obvious that the Minkowski limit of the coincident gauge metric should reduce to the Cartesian coordinates, but on the other hand the Minkowski spacetime in the Cartesian coordinates is already trivially in the coincident gauge, and it feels unsettling that the set 1 connection does not possess a direct link to that.
4.2 Connection set 2 general case (branch 1)
For the connection set 2 expressed by (24), the nontrivial equations (26) turn out to be
where again, the remaining equations are identical for each \(\xi ^\lambda (t,r,\theta ,\phi )\). Assuming \(c \ne k \ne 0\), the general solution of the system is
Thus the coordinate system of the coincident gauge can take various forms depending on the choice of the integration constants \(\alpha ^\lambda , \beta ^\lambda , \gamma ^\lambda , \sigma ^\lambda \). All these possibilities are permissible, provided that the Jacobian determinant
is regular. The expression (40) contains only the functions \(\Gamma ^{t}{}_{\theta \theta }\) and \(\Gamma ^{r}{}_{\theta \theta }\) while the other two functions \(\Gamma ^{t}{}_{rr}\) and \(\Gamma ^{r}{}_{rr}\) in the connection (24) are generated by the conditions (25).
A minimalistic choice would be to take \(\sigma ^0=\alpha ^1=\beta ^2=\gamma ^3=1\) and let the remaining constants to vanish. This gives
We can invert the expressions (42) to get
where we have denoted
The function \(r(\xi _w,\xi _x,\xi _y,\xi _z)\) is not arbitrary, but is obtained by inverting Eq. (42) and thus inherits several relations for its derivatives.
To proceed with transformations into the coincident gauge coordinates it is again convenient to have the Jacobian matrices written out in these coordinates. Taking the derivatives, we get
where \(\Gamma ^{t}{}_{\theta \theta }\), and \(\Gamma ^{r}{}_{\theta \theta }\) are functions of \(r(\xi _w,\xi _x,\xi _y,\xi _z)\). With these expressions it is straightforward to transform (16) the metric (20) into the coincident gauge as
Similarly, the affine connection components (24) can be transformed into the coincident gauge, resulting in the desired expression
The nature of the coincident coordinates is quite similar to the case of connection set 1, namely the angular variables map into the typical Cartesian equivalents, but the time and radial coordinate get mixed among all the directions. This property is illustrated by the Killing vectors (18) transformed into the coincident gauge as
The form of the vectors \(R^\mu \), \(S^\mu \), \(T^\mu \) corresponds exactly to the Killing vectors of spherical symmetry as expressed in the Cartesian coordinates, but the vector \(K^\mu \) representing static time translation symmetry has strangely nonzero compinents in all directions \(\xi ^\lambda \). Similarly to the set 1 case, in the Minkowski limit the metric (47) can not be reduced to the Cartesian form.
4.3 Connection set 2 special case (branch 2)
When the parameters c and k are zero, the qualitative features of the system (39) change and the solution (40) does not give a correct coordinate transformation since the Jacobian determinant (41) vanishes. However, the case \(c=k=0\) is important as it leads to nontrivial balck hole solutions in f(Q) [32] and scalar–tensor [35] symmetric teleparallel gravity. Therefore we need to tackle the equations (26) for the connection set 2 (see Eq. (24)) with \(c=k=0\) separately. The system of nontrivial equations turns out to be
The general solution is given by
Note that there are some qualitative differences with the previous case expression (40), and the latter does not reduce to the solution (51) above by setting \(c=k=0\) in (40). Nevertheless the overall structure of the present solutions is similar with four integration constants and integrals of the free functions. By taking the derivatives one can check explicitly that the connection (24) and (51) satisfy (26). The two other functions \(\Gamma ^{t}{}_{rr}\) and \(\Gamma ^{r}{}_{rr}\) are taken care of by the relations (25)
Again by picking different nonzero values of the integration constants the coincident gauge coordinate system will take different forms. All these are valid solutions as long as the Jacobian determinant
is regular and non-zero. As we did in the previous sections, a simple choice would be to take \(\sigma ^0=\alpha ^1=\beta ^2=\gamma ^3=1\) and let the remaining constants to vanish. This gives
We can invert these expressions (54) to get
where we have denoted
The function \(r(R(\xi _x, \xi _y, \xi _z))\) is the inverse of the last three equations of (54) and thus inherits the properties like
and chain rule must be taken into account in the calculations.
The Jacobian matrix and its inverse in the coincident coordinates (54) are
This helps us to transform (16) the metric (20) into the coincident gauge as
while the transformed (16) connection components (24) with \(c=k=0\) are of course
The nature of the coincident gauge coordinates is clarified by the Killing vectors (18) which get transformed into
Here we see that not only do the Killing vectors of the spherical symmetry exactly take the form as in the Cartesian coordinates, but also the time translation vector \(K^\mu \) responsible for staticity appears in the form as in the Cartesian coordinates. This lands us on a more familiar ground when the interpretation of some field configuration in the coincident gauge is needed. Furthermore, in the Minkowski limit \(g_{tt} \rightarrow 1\), \(g_{rr} \rightarrow 1\) this metric reduces to the familiar \(\eta _{\mu \nu }\) of Cartesian coordinates if \(\Gamma ^{t}{}_{\theta \theta } \rightarrow 0\), \(\Gamma ^{r}{}_{\theta \theta } \rightarrow \pm r\).
5 Minkowski limit
Noticing the issues arising with the Minkowski limit in the coincident gauge motivates us to check how do the connections (22) and (24) behave in the Minkowski limit
already in the spherical coordinates. In this limit all effects of gravity and inertia should vanish. One would expect that as this happens the nonmetricity tensor and nonmetricity scalar should also vanish identically, as there should be no residual nontrivial geometry left. As reasonable as this assumption sounds, it might not immediately meet an unanimous approval. The reason is that as matter is introduced into the theory by a minimal or metric coupling principle [38], it follows the Levi-Civita geodesics in symmetric teleparallel gravity. In other words, the particles only get to feel the properties of the metric, and as long as the metric is Minkowski, nontrivial nonmetricity in the background is impossible to detect directly. We will elaborate on this point some more in the discussion Sect. 8, and proceed here by calculating the nonmetricity tensor and scalar in the different sets.
5.1 Connection set 1
In spherical coordinates, taking the metric (20) to be Minkowski (63), and the connection to be given by Eq. (22), the nonmetricity tensor (6) is given by

while the nonmetricity scalar (9) is
It is apparent that there is no choice of the free functions \(\Gamma ^{\phi }{}_{r \phi }\), \(\Gamma ^{t}{}_{rr}\), \(\Gamma ^{r}{}_{rr}\) that could make the nonmetricity tensor and nonmetricity scalar to vanish in the Minkowski metric case.
5.2 Connection set 2 branch 1
In spherical coordinates, taking the metric (20) to be Minkowski (63), and the connection to be given by Eq. (24), the nonmetricity tensor (6) is given by

while the nonmetricity scalar (9) is another long expression (can be found explicitly in Refs. [32, 35]). Again, for arbitrary c, k there is no choice of the free functions \(\Gamma ^{t}{}_{\theta \theta }\), \(\Gamma ^{t}{}_{rr}\), \(\Gamma ^{r}{}_{\theta \theta }\), \(\Gamma ^{r}{}_{rr}\) that could make the nonmetricity tensor and nonmetricity scalar to vanish in the Minkowski metric case.
5.3 Connection set 2 branch 2
The only way to make the nonmetricity tensor (66) to vanish is to set \(c=k=0\) (connection set 2 branch 2) which yields
and the nonmetricity scalar
Thus when in addition to the metric condition (63) we also set
the nonmetricity tensor and scalar vanish in the Minkowski metric case. Note that the functions (69) are in accord with the condition (52), so everything is consistent.
What we see in this brief interlude, is that only in the connection set 2 branch 2 case the configuration is endowed with a direct Minkowski limit whereby nonmetricity can vanish. In this light perhaps it was not just a coincidence that only for set 2 branch 2 the black hole solutions were found in Refs. [32, 35], while set 2 branch 1 runs into troubles with asymptotic flatness [35]. Although further detailed investigation is welcome, it is plausible that only set 2 branch 2 connection is a physically meaningful choice. Thus perhaps we should not be surprised that only for this branch the coincident gauge metric in the Minkowski limit turned out to be just the Minkowski metric in Cartesian coordinates. These statements, however, must be taken as conjectures and not as definite proofs stating that the other sets are not physically interesting. There are some nontrivial exact black hole solutions in other teleparallel theories where in the Minkowski limit the torsion scalar is nonvanishing but still, the configuration seems to be physically acceptable [39, 40].
6 Schwarzschild solution
To illustrate the general results of Sect. 4 let us consider a simple example. When the static spherically symmetric metric (20) takes the Schwarzschild form
the field equations of the particular class of theories presented in (15) are satisfied for a constant scalar field that efffectively reduces the theory to STEGR,
In particular, the connection field equations are identically satisfied and any combination of the connection components is a solution, provided the curvature and torsion vanish. If we restrict to the connection that also exhibits static spherical symmetry, then we are left with to functional freedoms encoded in set 1 (22), (23), or set 2 (24), (25). Still, in the context of STEGR these two functional freedoms in the connection are left completely free by the field equations. All the same applies when we transform to the coincident gauge, as the field equations with the metric functions (70) do not impose any further constraints to the connection functions in any coordinate system. However we may attempt to fix the freedom in connection by demanding that in the coincident gauge the Schwarzschild metric should take some prescribed form. Since we assume a reasonable Minkowski limit to hold we only consider the connection set 2 branch 2 here (Eq. (24) with \(c=k=0\)).
6.1 Cartesian form
The first option one may naturally think of is that in the coincident gauge the the metric (20), (70) should assume the same form as in the Cartesian coordinates, i.e. the one which is obtained by the well known definitions
in the transformation (16a), yielding
where \(r^2=x^2+y^2+z^2\). The desired result is actually rather easy to obtain. The general coincident gauge metric (60) reduces to (73) if the connection of set 2 (24) with \(c=k=0\) is specified by
which is exactly the same as in the Minkowski limit (69), and matches the example proposed in Refs. [28, 29]. The connection functions (74) reduce the coordinate transformation (54) to (72), hence obtaining the Schwarzschild metric in the Cartesian coordinates is completely anticipated. The expressions of \(\Gamma ^{t}{}_{rr}\) and \(\Gamma ^{r}{}_{rr}\) in (74) follow from Eq. (52).
Thus although the connection components are not determined by the field equations, they still seem to have certain “natural” values if the Cartesian form for the coincident gauge can be considered as such. For this particular set of connection components (74) it turns out that the boundary term \(B_Q\) (11) vanishes, and the GR and STEGR actions have the same value, i.e.
While it is well known that for vacuum solutions like Scwarzschild the Levi-Civita curvature scalar \({\mathop {R}\limits ^{\circ }}\) is zero, for some other completely arbitrary forms of \(\Gamma ^r{}_{\theta \theta }\) the nonmetricity scalar Q (9) and the boundary term \(B_Q\) would not be zero, although they would still compensate each other to satisfy the relation (8).
The full affine connection in symmetric teleparallelism (1) is composed of the Levi-Civita part (2) and the extra part called disformation tensor (4). The latter is related to the nonmetricity tensor (6) and supplies the extra bits that make the curvature (7) and torsion (5) of the symmetric teleparallel connection to vanish. It is instructive to compare the full symmetric teleparallel connection \(\Gamma ^\lambda {}_{\mu \nu }\) to the disformation \(L^\lambda {}_{\mu \nu }\) in the spherical coordinates for the connection (24), (74):
We see that only the disformation part (77) carries information about the Schwarzschild mass. It may be interpreted as related to the gravitational force, as in the Minkowski limit where the source of gravity disappears the disformation tensor vanishes. At the same time the full connection (76) is independent of the M and has the same form also in the Minkowski case. It is tempting to interpret that as representing “inertia” which is present due to the curvilinear nature of the spherical coordinate system. The same features would of course carry over to the coincident gauge, i.e. the Cartesian coordinates, where disformation transforming as a tensor would still be proportional to M (now appearing in many nonzero x, y, z components), while the symmetric teleparallel connection will be zero as the curviliearity of the coordinates is “straightened out” removing the need to give account of the inertial effects. The Levi-Civita connection which is given by the difference of the full connection and disformation contains information about both the “gravity” and “inertia” aspect of the geometry. In GR, only the Levi-Civita connection is present which makes gravity and inertia inseparable. In STEGR these two aspects can in principle be distinguished, at least on the formal mathematical level.
Following a similar treatment as in TEGR [1, 2], the last point can be illustrated by rewriting the geodesic equation
which desribes the motion of a unit mass particle, using the decomposition of the Levi-Civita connection into symmetric teleparallel connection and disformation (1),
In this form it is indieed physically suggestive to interpret the LHS as describing the free particle inertial motion in curvilinear coordinates, while the RHS could be seen as representing the gravitational force, proportional to the mass of the source. In this reasoning the split of the particle equation of motion into the inertial and force parts is not arbitrary, but the the freedom in the symmetric teleparallel connection was fixed (74) by the heuristic argument that the coincident gauge should correspond to the Cartesian coordinates. The main issue with this argument is that the Cartesian form is not the only one compatible with the coincident gauge, as becomes apparent below.
6.2 Kerr–Schild form
An alternative option also worth to entertain would be to ask whether in the coincident gauge the metric (20), (70) could assume the same form as in the Kerr–Schild coordinates [41],
where f is a function and the vector \(k_\mu \) is by construction lightlike with respect to both \(\eta _{\mu \nu }\) and \(g_{\mu \nu }\) (80). In the case of the Schwarzschild solution \(f=\frac{2M}{r}\) and \(k_i= \begin{pmatrix} \frac{x}{r}&\frac{y}{r}&\frac{z}{r} \end{pmatrix}\), and thus the metric (80) written out explicitly has the form
where \(r^2=x^2+y^2+z^2\). Surprisingly or not, but this result is also relatively easy to obtain. The general coincident gauge metric (60) reduces to (81) if the connection of set 2 (24) with \(c=k=0\) is specified by
Here the components \(\Gamma ^{t}{}_{rr}\), \(\Gamma ^{r}{}_{rr}\) were derived from the condition (52). This connection reduces to the Minkowski limit (69) when the parameter M vanishes, as it should. The connection functions (82) give the coordinate transformation (54) the following form
valid outside of the black hole horizon \(r>2M\).
Although the connection components for the Cartesian form (74) and Kerr–Schild form (82) are different, also in the latter case it turns out that the boundary term \(B_Q\) (11) vanishes, and the GR and STEGR actions have the same value, i.e.
At the same time the split of the Levi-Civita connection into the teleparallel connection and disformation tensor for (82 yields a somewhat different result from the previous case, namely
It is not immediately clear what conclusion can be drawn from here. While the disformation tensor is still proportional to the mass M, there are also components containing M in the teleparallel connection. On the one hand one may think that this feature is unnatural, and the Cartesian form is more true to physical intuition. On the other hand the metric contains the parameter M as well, and it is perhaps a bit premature to claim that M in the connection (86) can not measure any inertial effects, especially as they all get eliminated in the coincident gauge, i.e. in the Kerr–Schild coordinates where the symmetric teleparallel connection vanishes. It goes without saying that in the Minkowski limit (63) both connections (74) and (82) reduce to the same (69).
6.3 Diagonal form
After seeing the Cartesian and Kerr–Schild forms of the coincident gauge metric, an obvious question arises whether a diagonal form of the coincident gauge metric is also possible. That would require taking
to make the off-diagonal components of (60) to vanish and satisfy the condition (52). The integral in (54) that relates the radial coordinate r to the coincident spatial coordinates,
is valid only for \(\frac{r}{2M} >1\), i.e. outside of the horizon (at \(R=1\)). With this restriction the coordinate transformation (54) acquires the following form
and the metric turns out to be
The structure of this form reminds the Schawarzchild metric in isotropic coordinates, however the multiplicative position of the parameter M is different. Despite this, when the relation between R and M (88) is properly taken into account the metric (90) reduces to the Cartesian form \(\eta _{\mu \nu }\) in the Minkowski limit \(M \rightarrow 0\), as expected.
In contrast to the two previous cases the nonmetricity scalar Q given by Eq. (9) (and correspondingly also the boundary term \(B_Q\) given by (11)) computed in spherical coordinates for the metric (70) and connection (87) is nontrivial, namely,
In other words, the choice of the connection (87) means the GR action of \({\mathop {R}\limits ^{\circ }}\) and the STEGR action of Q differ numerically (by the boundary term), although their differential structure is equivalent in the sense that its variation gives the same field equations.
Just for reference and comparison, let us also give here the teleparallel connection and disformation tensor that arise from the connection (88) in spherical coordinates:


The result looks more messy than in the two previous cases, as can be expected from the more elaborate form of the connection functions (87). There is no clear separation between the inertial connection without M and gravity represented by the disformation proportional to M. However, like in the Kerr–Schild case, it may be argued that since the parameter M appears in the metric (70), the inertial effects should depend on M too. In the Minkowski limit \(M \rightarrow 0\) the disformation tensor (86) vanishes, while the teleparallel connection (92) reduces to the same form as in the Cartesian case (76).
In summary, we saw how the coincident gauge for the Schwarzschild solution was not unique, and different choices of the coincident gauge coordinates are possible. Prescribing certain form for the coincident gauge metric fixed the functional freedom in the teleparallel connection, that was otherwise left undetermined by the field equations. Yet, without some extra input or argument is is hard to decide which form of the teleparallel connection could be considered truly physical (either (74), (82), (87), or some other). As different choices for the connection lead to different forms of the boundary term \(B_Q\), one should probably consider quantities depending on the boundary term to properly address this issue. Such investigation, however, remains beyond the scope of the present paper.
Finally let us also note that while in the coincident gauge the teleparallel connection vanishes, the resulting metrics (73), (81), and (90) have many nontrivial components or at least a nontrivial coordinate dependence, and thus do not lead to easier computations in practice. The spherical coordinates which are well adapted to the symmetry of the configuration are more economical for practical purposes, despite being associated with a few nonzero connection components.
7 BBMB solution
As shown in [35] the equations (15) for the theory
and in the case of set 2 branch 2 connection are solved by a Bocharova–Bronnikov–Melnikov–Bekenstein (BBMB) asymptotically flat black hole metric [42,43,44] along with the scalar field profile
and connection components
(the latter component is fixed by the condition (25)). In contrast to the Schwarszschild solution in STEGR discussed in the previous section, only the components \(\Gamma ^t{}_{\theta \theta }\) and \(\Gamma ^t{}_{rr}\) are left undetermined in the field equations. The coincident gauge metric (60) thus has one functional freedom \(\Gamma ^t{}_{\theta \theta }\), and fixing it in any way gives a valid metric in the coordinate system where the teleparallel connection vanishes everywhere in spacetime. In the next section we will give a simple example.
7.1 Diagonal form
A fairly easy choice would be to ask that the time coordinate does not get mixed with the rest, i.e. \(\xi _w=t\), and accordingly
This simplifies the transformation (54) a lot, giving
where \(R=r-M\) measures the radial distance from the black hole horizon. After transforming to the coincident coordinates (98) the metric (95) takes a bit surprisingly a diagonal form
which reminds of isotropic coordinates.
For the record, let us note that the Levi-Civita Ricci scalar, nonmetricity scalar (9), and the boundary term (11) are
The BBMB metric was originally found as a solution in the usual metric and torsion free scalar–tensor theory with a vanishing potential but a different form of the coupling function \({\mathcal {A}}(\Phi )\) to the curvature scalar \({\mathop {R}\limits ^{\circ }}\). Deeper reasons why this solution exists in the scalar–tensor versions of symmetric teleparallelism based on nonmetricity [35] as well as metric teleparallelism based on torsion [40] remain to be understood.
We may also substitute the functions (96) and (97) into the full connection (24) and compare it with the disformation,


Here the teleparallel connection can be understood as representing “inertia”, while the disformation part of the connection represents “gravity”, since taking M to zero makes it to vanish completely. Note that the connection (101) is in an analogous form to the Schwarzschild connection in the Cartesian case (76), but the respective expressions (77) and (102) for the disformation tensor have some differences. Otherwise, the coordinate transformation (98) and the diagonal metric (99) are more similar to the transformation (89) and the diagonal metric (90) of the Schwarzschild solution, but the BBMB connection (96), (97) is rather different from the corresponding Schwarzschild one (92).
7.2 Cartesian and Kerr–Schild forms are not compatible with the coincident gauge
While in the case of the Schwarzschild solution the static spherically symmetric connection was endowed with two functional freedoms which could be used to give the coincident gauge metric a specific form, in the BBMB case one of those functional freedoms is fixed by the connection field equation and thus the options to give the coincident gauge metric an arbitrary form are more limited. The reason for this is the fact that the BBMB solution exists in the symmetric teleparallel scalar–tensor gravity theory (see the action (12)) and then, the role of the extra components of the connection play a dynamical role in the field equations. Due to this, some connection components are directly set by the solving the field equations (15)–(15c), while in the Schwarzschild case, the theory is just reduced to STEGR and the extra components of the connection do not enter into the field equations (so that they are free functions).
One conclusion that can be obtained is that it turns out the Cartesian and Kerr–Schild forms of the metric are not consistent with the coincident gauge in the BBMB case. It is rather straightforward to check this claim for the Cartesian form. One would take the metric (60) with \(\Gamma ^{r}{}_{\theta \theta }\) expressed by (96). In order to make the components \(g_{it}\) to vanish, it is necessary to require that \(\Gamma ^{t}{}_{\theta \theta } =0\). But this immediately brings the metric into the isotropic-like form (99), not the Cartesian form. To check the incompatibility of the Kerr–Schild form, one can again begin with the coincident gauge metric (60) with \(\Gamma ^{r}{}_{\theta \theta }\) given by (96). Equating the components of this metric with the general Kerr–Schild form (80) yields an overdetermined system of equations which has no real solutions for the remaining functions f, \(k_i\), and \(\Gamma ^{t}{}_{\theta \theta }\). For example, the 0i-components give \(\Gamma ^t{}_{\theta \theta } =\frac{2 M r^2}{\left( r-M\right) ^2}\) which in turn is incompatible with the ij-components. Thus for the BBMB solution of the symmetric teleparallel scalar–tensor theory considered in the coincident gauge metric can not be put into the Kerr–Schild form either. Of course, it is possible to transform the BBMB solution into the Cartesian or Kerr–Schild coordinates, just the teleparallel connection is not zero in those coordinates.
8 Conclusions and discussion
In this paper we studied how the two different sets describing static spherically symmetric spacetime configurations in symmetric teleparallel gravities appear in the coincident gauge. By doing this, instead of having a metric and a nonzero affine connection, one chooses a specific coordinate system (coincident gauge) such that the connection vanishes but all the extra information coming from the connection is encoded in the metric. We have found that this method does not give a unique coordinate system, instead, there are infinite coordinate systems satisfying this condition. We solved the transformation for those coordinate systems in a generic way and then provided different particular coordinate systems as examples. In principle, this can be considered as an algorithm that one can use to derive coincident gauge coordinates. It applies not only for STEGR, but also in any modified version of symmetric teleparallel gravity as well.
As a byproduct of the investigations, we noticed that only the connection of set 2 branch 2 can provide a vanishing nonmetricity tensor and nonmetricity scalar in the Minkowski limit. For all the other branches, it is not possible to find any suitable value for the connection components such that these quantites vanish. To unpack the context, recall that in the Riemannian case, if the metric is the Minkowski one, all curvature quantities are trivially zero. However, in symmetric teleparallel gravity, since the metric and the connection are independent (or not directly related), one can have the situation that even if the metric is Minkowski, still, the nonmetricity tensor (and its scalars) could be nonvanishing. This is related to the fact that we only imposed that the connection and the metric are spherically symmetric, but it does not imply that in the Minkowski limit both quantities would still respect the same symmetries (Minkowski symmetries). It is kind of expected to have the property that all gravitational scalars should vanish in Minkowski, and one might think that due to this, one might need to discard the other branches as unphysical. However, since matter is only coupled to the metric (and at most to the Levi-Civita connection), a priori, there is nothing unphysical to consider that even in Minkowski, those scalars (and tensors) are nonvanishing. Further, several solutions have been recently found in torsional teleparallel gravity whose scalars are nonvanishing in the Minkowski limit, and still those solutions represent physically realistic black hole configurations [39, 40, 45]. In some ways the situation is analogous to how only one branch of the axially symmetric torsional connections has a proper spherically symmetric limit [23].
We also studied the case of the Schwarzschild and the BBMB metrics for several coordinate systems compatible with the coincident gauge. By fixing the freedom in the connection allowed by the symmetry and the field equations, the Schwarzshild metric in the coincident gauge can take for example the Cartesian, Kerr–Schild and diagonal (isotropic-like) forms, while the BBMB metric can be put only in the diagonal but not in the Cartesian or Kerr–Schild forms. In principle, different connections imply different values for the boundary term, but there is no known well defined way to fix the undetermined connection components in those solutions. Going to the coincident gauge does not seem to provide a clear way to fix them either. We considered several arguments about trying to fix those components, ranging from the form of the coincident gauge metric to asking the teleparallel connection to be purely “inertial”, but it feels some extra input or argument is necessary. Thus, further studies about different physical implications of those components need to be conducted. A possible way ahead could be related to choosing the so-called canonical frame of symmetric teleparallel gravity [30, 31], defined as an inertial frame.
We also noticed that even though the connection vanishes in the coincident gauge, in spherical symmetry, computations do not become simpler since the metric becomes more complicated. However, it could be that one might still find some particular coordinate systems compatible with the coincident gauge where the metric becomes or remains simple. We have noticed that this can happen for certain coordinate system such as the one used in the BBMB section (see Sect. 7) which resembles some notions from isotropic coordinates. Remarkably, this coordinate choice makes the metric diagonal and very simple while the connection is vanishing. Even though the solution and its physical interpretation will not change by making those coordinate transformations, the role of the connection might be different in each of them and it could be important for studies concerning the entropy of black holes. Further investigations regarding those topics could be considered in the future.
Data Availability statement
This manuscript has no associated data or the data will not be deposited. [Authors’ comment: The work is purely mathematical in nature, all results can be reproduced from the formulae given in the paper.]
References
R. Aldrovandi, J.G. Pereira, Teleparallel Gravity, vol. 173 (Springer, Dordrecht, 2013). https://doi.org/10.1007/978-94-007-5143-9
M. Krssak, R.J. van den Hoogen, J.G. Pereira, C.G. Böhmer, A.A. Coley, Teleparallel theories of gravity: illuminating a fully invariant approach. Class. Quantum Gravity 36(18), 183001 (2019). https://doi.org/10.1088/1361-6382/ab2e1f. arXiv:1810.12932 [gr-qc]
J.M. Nester, H.-J. Yo, Symmetric teleparallel general relativity. Chin. J. Phys. 37, 113 (1999). arXiv:gr-qc/9809049
J.B. Jiménez, L. Heisenberg, T. Koivisto, Coincident general relativity. Phys. Rev. D 98(4), 044048 (2018). https://doi.org/10.1103/PhysRevD.98.044048. arXiv:1710.03116 [gr-qc]
J.B. Jiménez, L. Heisenberg, T.S. Koivisto, Teleparallel Palatini theories. JCAP 08, 039 (2018). https://doi.org/10.1088/1475-7516/2018/08/039. arXiv:1803.10185 [gr-qc]
J.B. Jiménez, L. Heisenberg, T.S. Koivisto, The geometrical trinity of gravity. Universe 5(7), 173 (2019). https://doi.org/10.3390/universe5070173. arXiv:1903.06830 [hep-th]
J.B. Jiménez, L. Heisenberg, D. Iosifidis, A. Jiménez-Cano, T.S. Koivisto, General teleparallel quadratic gravity. Phys. Lett. B 805, 135422 (2020). https://doi.org/10.1016/j.physletb.2020.135422. arXiv:1909.09045 [gr-qc]
G.R. Bengochea, R. Ferraro, Dark torsion as the cosmic speed-up. Phys. Rev. D 79, 124019 (2009). https://doi.org/10.1103/PhysRevD.79.124019. arXiv:0812.1205 [astro-ph]
E.V. Linder, Einstein’s other gravity and the acceleration of the universe. Phys. Rev. D 81, 127301 (2010). (Erratum: Phys. Rev. D82,109902(2010)). https://doi.org/10.1103/PhysRevD.82.109902. arXiv:1005.3039 [astro-ph.CO]
A. Golovnev, T. Koivisto, M. Sandstad, On the covariance of teleparallel gravity theories. Class. Quantum Gravity 34(14), 145013 (2017). https://doi.org/10.1088/1361-6382/aa7830. arXiv:1701.06271 [gr-qc]
M. Hohmann, L. Järv, M. Krššák, C. Pfeifer, Teleparallel theories of gravity as analogue of nonlinear electrodynamics. Phys. Rev. D 97(10), 104042 (2018). https://doi.org/10.1103/PhysRevD.97.104042. arXiv:1711.09930 [gr-qc]
T. Koivisto, M. Hohmann, L. Marzola, Axiomatic derivation of coincident general relativity and its premetric extension. Phys. Rev. D 103(6), 064041 (2021). https://doi.org/10.1103/PhysRevD.103.064041. arXiv:1909.10415 [gr-qc]
C.-Q. Geng, C.-C. Lee, E.N. Saridakis, Y.-P. Wu, “Teleparallel’’ dark energy. Phys. Lett. B 704, 384–387 (2011). https://doi.org/10.1016/j.physletb.2011.09.082. arXiv:1109.1092 [hep-th]
M. Hohmann, L. Jarv, U. Ualikhanova, Covariant formulation of scalar-torsion gravity. Phys. Rev. D 97(10), 104011 (2018). https://doi.org/10.1103/PhysRevD.97.104011. arXiv:1801.05786 [gr-qc]
L. Järv, M. Rünkla, M. Saal, O. Vilson, Nonmetricity formulation of general relativity and its scalar–tensor extension. Phys. Rev. D 97(12), 124025 (2018). https://doi.org/10.1103/PhysRevD.97.124025. arXiv:1802.00492 [gr-qc]
S. Bahamonde, K.F. Dialektopoulos, C. Escamilla-Rivera, G. Farrugia, V. Gakis, M. Hendry, M. Hohmann, J.L. Said, J. Mifsud, E. Di Valentino, Teleparallel gravity: from theory to cosmology. arXiv:2106.13793 [gr-qc]
L.P. Eisenhart, Non-Riemannian Geometry (American Mathematical Society, New York, 1927)
R. Ferraro, F. Fiorini, Spherically symmetric static spacetimes in vacuum f(T) gravity. Phys. Rev. D 84, 083518 (2011). https://doi.org/10.1103/PhysRevD.84.083518. arXiv:1109.4209 [gr-qc]
N. Tamanini, C.G. Boehmer, Good and bad tetrads in f(T) gravity. Phys. Rev. D 86, 044009 (2012). https://doi.org/10.1103/PhysRevD.86.044009. arXiv:1204.4593 [gr-qc]
M. Hohmann, L. Järv, M. Krššák, C. Pfeifer, Modified teleparallel theories of gravity in symmetric spacetimes. Phys. Rev. D 100(8), 084002 (2019). https://doi.org/10.1103/PhysRevD.100.084002. arXiv:1901.05472 [gr-qc]
C. Bejarano, R. Ferraro, M.J. Guzmán, Kerr geometry in f(T) gravity. Eur. Phys. J. C 75, 77 (2015). https://doi.org/10.1140/epjc/s10052-015-3288-x. arXiv:1412.0641 [gr-qc]
L. Järv, M. Hohmann, M. Krššák, C. Pfeifer, Flat connection for rotating spacetimes in extended teleparallel gravity theories. Universe 5, 142 (2019). https://doi.org/10.3390/universe5060142. arXiv:1905.03305 [gr-qc]
S. Bahamonde, J.G. Valcarcel, L. Järv, C. Pfeifer, Exploring axial symmetry in modified teleparallel gravity. Phys. Rev. D 103(4), 044058 (2021). https://doi.org/10.1103/PhysRevD.103.044058. arXiv:2012.09193 [gr-qc]
M. Hohmann, General covariant symmetric teleparallel cosmology. Phys. Rev. D 104(12), 124077 (2021). https://doi.org/10.1103/PhysRevD.104.124077. arXiv:2109.01525 [gr-qc]
F. D’Ambrosio, L. Heisenberg, S. Kuhn, Revisiting cosmologies in teleparallelism. Class. Quantum Gravity 39(2), 025013 (2022). https://doi.org/10.1088/1361-6382/ac3f99. arXiv:2109.04209 [gr-qc]
N. Dimakis, A. Paliathanasis, M. Roumeliotis, T. Christodoulakis, FLRW solutions in f(Q) theory: the effect of using different connections. Phys. Rev. D 106(4), 043509 (2022). https://doi.org/10.1103/PhysRevD.106.043509. arXiv:2205.04680 [gr-qc]
J.B. Jiménez, T.S. Koivisto, Lost in translation: the Abelian affine connection (in the coincident gauge). Int. J. Geom. Methods Mod. Phys. 19(07), 2250108 (2022). https://doi.org/10.1142/S0219887822501080. arXiv:2202.01701 [gr-qc]
D. Zhao, Covariant formulation of f(Q) theory. Eur. Phys. J. C 82(4), 303 (2022). https://doi.org/10.1140/epjc/s10052-022-10266-4. arXiv:2104.02483 [gr-qc]
R.-H. Lin, X.-H. Zhai, Spherically symmetric configuration in \(f(Q)\) gravity. Phys. Rev. D 103(12), 124001 (2021). https://doi.org/10.1103/PhysRevD.103.124001. arXiv:2105.01484 [gr-qc]
J.B. Jiménez, L. Heisenberg, T.S. Koivisto, The canonical frame of purified gravity. Int. J. Mod. Phys. D 28(14), 1944012 (2019). https://doi.org/10.1142/S0218271819440127. arXiv:1903.12072 [gr-qc]
D.A. Gomes, J.B. Jiménez, T.S. Koivisto, Energy and entropy in the geometrical trinity of gravity. arXiv:2205.09716 [gr-qc]
F. D’Ambrosio, S.D.B. Fell, L. Heisenberg, S. Kuhn, Black holes in f(Q) gravity. Phys. Rev. D 105(2), 024042 (2022). https://doi.org/10.1103/PhysRevD.105.024042. arXiv:2109.03174 [gr-qc]
F.W. Hehl, P. Von Der Heyde, G.D. Kerlick, J.M. Nester, General relativity with spin and torsion: foundations and prospects. Rev. Mod. Phys. 48, 393–416 (1976). https://doi.org/10.1103/RevModPhys.48.393
F.W. Hehl, J.D. McCrea, E.W. Mielke, Y. Ne’eman, Metric-affine gauge theory of gravity: Field equations, Noether identities, world spinors, and breaking of dilation invariance. Phys. Rep. 258, 1–171 (1995). https://doi.org/10.1016/0370-1573(94)00111-F. arXiv:gr-qc/9402012
S. Bahamonde, J.G. Valcarcel, L. Järv, J. Lember, Black hole solutions in scalar–tensor symmetric teleparallel gravity. JCAP 08, 082 (2022). https://doi.org/10.1088/1475-7516/2022/08/082. arXiv:2206.02725 [gr-qc]
D. Blixt, R. Ferraro, A. Golovnev, M.-J. Guzmán, Lorentz gauge-invariant variables in torsion-based theories of gravity. Phys. Rev. D 105(8), 084029 (2022). https://doi.org/10.1103/PhysRevD.105.084029. arXiv:2201.11102 [gr-qc]
M. Hohmann, Metric-affine geometries with spherical symmetry. Symmetry 12(3), 453 (2020). https://doi.org/10.3390/sym12030453. arXiv:1912.12906 [math-ph]
J.B. Jiménez, L. Heisenberg, T. Koivisto, The coupling of matter and spacetime geometry. Class. Quantum Gravity 37(19), 195013 (2020). https://doi.org/10.1088/1361-6382/aba31b. arXiv:2004.04606 [hep-th]
S. Bahamonde, A. Golovnev, M.-J. Guzmán, J.L. Said, C. Pfeifer, Black holes in f(T, B) gravity: exact and perturbed solutions. JCAP 01(01), 037 (2022). https://doi.org/10.1088/1475-7516/2022/01/037. arXiv:2110.04087 [gr-qc]
S. Bahamonde, L. Ducobu, C. Pfeifer, Scalarized black holes in teleparallel gravity. JCAP 04(04), 018 (2022). https://doi.org/10.1088/1475-7516/2022/04/018. arXiv:2201.11445 [gr-qc]
R.P. Kerr, Gravitational field of a spinning mass as an example of algebraically special metrics. Phys. Rev. Lett. 11, 237–238 (1963). https://doi.org/10.1103/PhysRevLett.11.237
N. Bocharova, K. Bronnikov, V. Melnikov, An exact solution of the system of Einstein equations and mass-free scalar field. Vestn. Mosk. Univ. Fiz. Astro 6, 706 (1970)
J.D. Bekenstein, Exact solutions of Einstein conformal scalar equations. Ann. Phys. 82, 535–547 (1974). https://doi.org/10.1016/0003-4916(74)90124-9
J.D. Bekenstein, Black holes with scalar charge. Ann. Phys. 91, 75–82 (1975). https://doi.org/10.1016/0003-4916(75)90279-1
K. Jusufi, S. Capozziello, S. Bahamonde, M. Jamil, Testing Born-Infeld \(f(T)\) teleparallel gravity through Sgr \(\text{A}^\star \) observations. arXiv:2205.07629 [gr-qc]
Acknowledgements
S.B. is supported by JSPS Postdoctoral Fellowships for Research in Japan and KAKENHI Grant-in-Aid for Scientific Research no. JP21F21789. L.J. is supported by the Estonian Research Council Grant PRG356 “Gauge Gravity”. The authors also acknowledge support by the European Regional Development Fund through the Center of Excellence TK133 “The Dark Side of the Universe”.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
Funded by SCOAP3. SCOAP3 supports the goals of the International Year of Basic Sciences for Sustainable Development.
About this article

Cite this article
Bahamonde, S., Järv, L. Coincident gauge for static spherical field configurations in symmetric teleparallel gravity. Eur. Phys. J. C 82, 963 (2022). https://doi.org/10.1140/epjc/s10052-022-10922-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjc/s10052-022-10922-9