
Abstract
Under the scenario of generalized measurements, it can be questioned how much of quantum uncertainty can be attributed to measuring device, independent of the uncertainty in the measured system. On the course to answer the question, we suggest a new class of entropic uncertainty relation that differentiates quantum uncertainty from device imperfection due to the unsharpness of measurement. In order to quantify the unsharpness, we suggest and analyze the quantity that characterizes the uncertainty in the measuring device, based on Shannon entropy. Using the quantity, we obtain a new lower bound of entropic uncertainty with unsharpness and it has been shown that the relation can also be obtained under the scenario that sharp observables are affected by the white noise and amplitude damping.
Similar content being viewed by others

Introduction
After Heisenberg introduced the uncertainty relation1, it has become the central principle in quantum physics and it still gives rise to subsequent debates in the clarification of its underlying meaning todate2. It is well-known that the early formulation of the uncertainty relations have been based upon the statistical quantification as like standard deviation. The uncertainty relation (UR) has been widely expressed in the form of Robertson’s UR3 as

for two self-adjoint operators  and  which apply to a quantum state
which apply to a quantum state  . The notations are
. The notations are  and (ΔA)2 = 〈Â2〉−〈Â〉2. Standard deviation, however, is not the ultimate measure of uncertainty, in the sense that well-defined measure need to be invariant under the relabeling of measurement outcomes as discussed4. Moreover, the lower bound in (1) is not only state-dependent, but also vanishes for states
and (ΔA)2 = 〈Â2〉−〈Â〉2. Standard deviation, however, is not the ultimate measure of uncertainty, in the sense that well-defined measure need to be invariant under the relabeling of measurement outcomes as discussed4. Moreover, the lower bound in (1) is not only state-dependent, but also vanishes for states  which are not common eigenstates of non-commuting operators5. Overcoming the incompleteness, Shannon entropy was to be used in order to formulate UR which generates so-called entropic UR. As a result, it is found that entropic UR is stronger than that of Robertson’s UR (1) for the case of continuous variables systems6. On the other hand, for discrete variables, the entropic UR comes to have a state-independent bound7 and it is shown that the entropic UR is neither stronger nor weaker than (1) in general8.
which are not common eigenstates of non-commuting operators5. Overcoming the incompleteness, Shannon entropy was to be used in order to formulate UR which generates so-called entropic UR. As a result, it is found that entropic UR is stronger than that of Robertson’s UR (1) for the case of continuous variables systems6. On the other hand, for discrete variables, the entropic UR comes to have a state-independent bound7 and it is shown that the entropic UR is neither stronger nor weaker than (1) in general8.
Here, we would like to point out that all the previous discussions are under the assumption of projection-valued measure (PVM) in their measurements. They do not encompass the general circumstance of quantum measurements. The generalized measurements are represented by positive-operator-valued measures (POVMs) which are set of positive operators, satisfying the completeness but not orthogonality necessarily. To specify the orthogonality, we shall call an observable sharp if it can be described by PVM, otherwise we call it unsharp. Concept of unsharp observables plays important roles in quantum information as they can be used to extract more information from a quantum system than measurements described by PVM9.
The entropic UR for POVMs has been formulated by Krishna et al.10 for the first time. Later, alternative form of the formula has been proposed11 and it is proved that the lower bound is to be stronger than the one in ref. 10, as following12. Consider two observables A and B described by POVMs {Âi} and  , respectively. Then, Shannon entropy is defined as
, respectively. Then, Shannon entropy is defined as  associated with probability distributions
associated with probability distributions  where
where  (similarly for Hρ(B)). As a matter of brevity, base of log will be omitted through this work. Using the operator norm
(similarly for Hρ(B)). As a matter of brevity, base of log will be omitted through this work. Using the operator norm  , i.e. maximal singular value of Â, the entropic UR is of the form11,12
, i.e. maximal singular value of Â, the entropic UR is of the form11,12

for a quantum state  , where the lower bound is defined as
, where the lower bound is defined as

From its definition, the bound C is given independent to the state and the relation (2) is reduced to the Massen and Uffink UR7 for projective measurements. For the properties, one can refer the work in ref. 13 for further details. In the similar vein, the entropic uncertainty relations have been studied with use of generalized entropies in Rastegin14. The effects of entanglement and mixedness on the lower bounds of entropic UR have been discovered15 and discussed extensively12,16. Although generalized entropic UR for POVMs has been derived and discussed before, the general operational meaning of the bound is not very clear in the literatures. When the measurements are projective, uncertainty relations impose the trade-off constraint of two ideal measurements. In comparison, when the measurement is POVM, the relationship includes the additional uncertainties coming from the unsharpness of measuring devices in its lower bound. In the inequality, thus, uncertainties either from quantum system or unsharpness of measuring devices should be identified in principle. Here, we provide the quantification that the different source of “uncertainties” can be discriminated in general.
In the preliminary works, quantifications of intrinsic unsharpness of measuring device described by POVM have been formulated using operator norm and the role of unsharpness on joint measurability has been investigated17,18. Especially in the work by Busch18, axioms that a measure of unsharpness should obey has been proposed. From a different angle, Massar has also defined additional uncertainty coming from the intrinsic unsharpness in terms of statistical variance19. In the same vein, here, we try to quantify the measure of unsharpness in a measuring device based on entropy. Our quantification averages the entropic uncertainties in the measuring process and is called device uncertainty. From the definition, one can naturally discriminate the device uncertainty from the uncertainty in the original state and we attribute the latter to quantum uncertainty. Furthermore, we provide a way to quantify the device uncertainty under POVM and differentiate it from the quantum uncertainty in the measured system. With the quantifications, we investigate the explicit effects of unsharpness of POVM on entropic URs.
This paper is organized as following. Device uncertainty is defined as a measure of unsharpness based on entropy, and its appropriate properties is provided. Physical meaning of the device uncertainty, then, is clarified as we analyze two-level systems. Using the definition of device uncertainty, we introduce quantum uncertainty and show that it satisfies relevant properties. Based on quantifications of unsharpness, effects of unsharpness on entropic uncertainty is considered for specific noise models such as white noise and amplitude damping.
Known lower bound of entropy for a single observable.
Before we quantify unavoidable uncertainty originating from unsharpness of measuring device, let us consider the entropic lower bound for single observable A. It is described by set of operators {Âi} which are positive definite satisfying  . Here, n is the number of outcomes and
. Here, n is the number of outcomes and  denotes the identity matrix for d-dimensional system. With the POVM, one cannot predict measurement outcomes deterministically over all the prepared states in general. The situation can be described by entropic bound as follows
denotes the identity matrix for d-dimensional system. With the POVM, one cannot predict measurement outcomes deterministically over all the prepared states in general. The situation can be described by entropic bound as follows

which is originally provided by Krishna el al.10. The lower bound for single observable reflects the imperfection of the measuring device A. It means that, when the outcomes are obtained from a measuring device with imperfect resolution, uncertainty of the original system in terms of entropy is lower-bounded by the most accurate resolution scale among the outcomes.
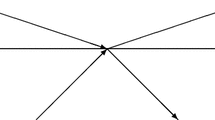
The lower bound of (4) can vanish when one of the elements of POVM is a projector even if the other POVM elements are not full projective. The situation is depicted in Fig. 1. It is when the partial sectors of a measuring device are projective while the rest are fuzzy as it is delineated in Fig. 1. Thus, the lower bound of entropy can disappear even though the measuring device is not perfect. It implies that the lower bound does not appropriately quantify the extent of device uncertainty coming from measurement unsharpness. In order to quantify and distinguish device uncertainty in terms of entropy, we need to identify more proper quantification of genuine lower bound of entropy in the measuring device. Here, we suggest a new measure of device imperfection and examine its properties in the following.

This figure illustrates a nontrivial case of unsharp measurement A that is partially sharp, where input state  is expressed as the linear superposition of orthonormal states {|ai〉} with complex numbers ci obeying
is expressed as the linear superposition of orthonormal states {|ai〉} with complex numbers ci obeying  . The input state, then, can be sharply measured if c3 = c4 = 0. Otherwise, we can not sharply measure it, since we can not distinguish |a3〉 and |a4〉.
. The input state, then, can be sharply measured if c3 = c4 = 0. Otherwise, we can not sharply measure it, since we can not distinguish |a3〉 and |a4〉.
Results
Device uncertainty for general POVM
Let us derive a stronger lower bound of entropy than the one in (4). We show that it is well-formulated as a measure of unsharpness at the same time. As a first step, let us assume that a POVM of an observable A is described in  of which the number of outcomes is n. Each element of A, then, can be written as
of which the number of outcomes is n. Each element of A, then, can be written as

where  ’s are eigenvalues of i-th element of POVM.
’s are eigenvalues of i-th element of POVM.  is an eigenstate corresponding to
is an eigenstate corresponding to  satisfying
satisfying  due to the positivity and completeness relation. Unsharpness of Âi disappears only when they are written as projectors. By means of the expression (5), the projective condition is equivalent to the statement that all eigenvalues of Âi are unity as they are given by
due to the positivity and completeness relation. Unsharpness of Âi disappears only when they are written as projectors. By means of the expression (5), the projective condition is equivalent to the statement that all eigenvalues of Âi are unity as they are given by  18. From the fact, it can be argued that
18. From the fact, it can be argued that  solely cannot be an appropriate measure of unsharpness. It is because
solely cannot be an appropriate measure of unsharpness. It is because  = 0 does not mean that Âi for
= 0 does not mean that Âi for  are projectors. To overcome this, one can identify that an unsharpness measure should be defined as a function of eigenvalues
are projectors. To overcome this, one can identify that an unsharpness measure should be defined as a function of eigenvalues  vanishing when
vanishing when  are given by 0 or 1. Additionally, in order to capture nontrivial cases that an unsharp measurement is partially sharp as depicted in Fig. 1, it is necessary to take into account how much overlap exists between a given state
are given by 0 or 1. Additionally, in order to capture nontrivial cases that an unsharp measurement is partially sharp as depicted in Fig. 1, it is necessary to take into account how much overlap exists between a given state  and
and  . As a specific function reflecting these features, let us take
. As a specific function reflecting these features, let us take  and take the average such that
and take the average such that  . Finally, summing over all the POVM elements, we obtain
. Finally, summing over all the POVM elements, we obtain

which is called as device uncertainty. It can be proved that the entropy of probability distribution A is lower bounded by the quantity, Dρ(A), due to the concavity of the log function h(x)20 applied to  . Furthermore, the device uncertainty can be proved to be a stronger lower bound than the one in (4). Namely, their relationship is written as
. Furthermore, the device uncertainty can be proved to be a stronger lower bound than the one in (4). Namely, their relationship is written as

where the minimal device uncertainty over states is obtained by diagonalizing  and taking the lowest eigenvalue of it. Thus, the device uncertainty defined as an unsharpness measure gives us not only lower bound of the entropy by itself, but also improved state-independent lower bound. Detailed proof of third inequality can be found in Method section.
and taking the lowest eigenvalue of it. Thus, the device uncertainty defined as an unsharpness measure gives us not only lower bound of the entropy by itself, but also improved state-independent lower bound. Detailed proof of third inequality can be found in Method section.
Now, let us show that the device uncertainty is appropriate measure for the unsharpness of POVM. In the previous work, Massar has defined a quantity to characterize an additional uncertainty coming from intrinsic unsharpness of POVM based on statistical variance19. Subsequently, he has proposed a list of criteria to show the quantity is appropriately defined as a measure of unsharpness. In accordance with the approach, we prove the validity of the device uncertainty as follows.
(D-i)  , which can be found due to the concavity of entropy20.
, which can be found due to the concavity of entropy20.
(D-ii)  for all states if and only if
for all states if and only if  with 0 ≤ λ ≤ 1 satisfying
with 0 ≤ λ ≤ 1 satisfying  . Namely, the entropic uncertainty of measurement outcomes distribution only comes from the device uncertainty, Dρ(A).
. Namely, the entropic uncertainty of measurement outcomes distribution only comes from the device uncertainty, Dρ(A).
(D-iii) Dρ (A) = 0 for all states if and only if A is PVM.
(D-iv) A convex combination of two POVMs cannot be sharper than these two POVMs themselves. For example, let us consider two observables A, B acting on same quantum system described by |ψ〉 with probability p and q satisfying p + q = 1, respectively. We construct the convex combination of two POVMs  , then the device uncertainty becomes larger than the convex combination of device uncertainty such as
, then the device uncertainty becomes larger than the convex combination of device uncertainty such as

where the binary entropy is defined by 
We have shown that Dρ (A) satisfies the criteria for unsharpness. there are a couple of comments that can be made on the criteria. Firstly, the upper bound of the device uncertainty is given by Hρ (A) and the gap quantifies how much entropic uncertainty originates from the state. Secondly, an important point of the quantity is that the device uncertainty is state-dependent. In our case, we consider the additional uncertainty from unsharpness that is state-dependent as depicted in Fig. 1. It is the case when the device imperfection is differently responding to the measured state as the degree of unsharpness can be varied depending upon the state. For instance, when  for the state
for the state  in Fig. 1, entropy of the outcome probabilities is given as log 2 as the state is corresponding to the sector of sharp measurements. In the case, due to the projective property of the corresponding sector, we have Dρ (A) = 0. On the other hand, when c1 = c2 = 0,
in Fig. 1, entropy of the outcome probabilities is given as log 2 as the state is corresponding to the sector of sharp measurements. In the case, due to the projective property of the corresponding sector, we have Dρ (A) = 0. On the other hand, when c1 = c2 = 0,  , entropy is also given as log 2 and the uncertainty originate from unsharpness of measurement as to give Dρ (A) = log 2. As a way to quantify state-independent unsharpness in terms of device uncertainty, the maximally mixed state can be considered as a measured state, covering all degrees of freedom.
, entropy is also given as log 2 and the uncertainty originate from unsharpness of measurement as to give Dρ (A) = log 2. As a way to quantify state-independent unsharpness in terms of device uncertainty, the maximally mixed state can be considered as a measured state, covering all degrees of freedom.
Device uncertainty for two-level system
In order to clarify the meaning of the device uncertainty, let us consider a POVM Â in two-level quantum system which is described in two dimensional Hilbert space,  . We define their elements as
. We define their elements as

where  . In this case, the operators, Â↑,↓, are decomposed into bases |a±〉 which are the eigenstates of
. In this case, the operators, Â↑,↓, are decomposed into bases |a±〉 which are the eigenstates of  and their corresponding eigenvalues are denoted by
and their corresponding eigenvalues are denoted by

where p(↑,↓|±) are the conditional probabilities of the measurement outcomes, ↑,↓, for the input states |a±〉, respectively. The notations are sketched in Fig. 2. For the case of an ideal measurement, i.e.  , which results p(↑|+) = 1 and p(↓|+) = 0. In general, the conditional probabilities take arbitrary values between 0 and 1. It follows that, among the conditional probabilities and the parameters, there are relationships such as
, which results p(↑|+) = 1 and p(↓|+) = 0. In general, the conditional probabilities take arbitrary values between 0 and 1. It follows that, among the conditional probabilities and the parameters, there are relationships such as  . Then, it is trivial to identify
. Then, it is trivial to identify

In this case, the probabilities to obtain ↑ and ↓ are denoted by the conditional probability p(↑|+) or p(↓|+). Then, in this case, the probability for bit flip error corresponds to p(↓|+) and the uncertainty emerged by the bit flip error is quantified by Hbin(p(↑|+)). In the same way, a situation that |a_〉 is injected can be considered.

where Hbin is binary entropy defined as  . Using the relation, according to (6), we can evaluate the device uncertainty of A for a input state
. Using the relation, according to (6), we can evaluate the device uncertainty of A for a input state  as follows,
as follows,

Only when the measurement is sharp, this value vanishes for all states, so thus there is no uncertainty from the imperfection of measuring device. Physically, the device uncertainty can be interpreted as the averaged quantification of the bit flip error in the measuring device. It is because the probability for the bit flip error is given by p(↓|+) implying that the measuring device misjudge the state when the input state is the eigenstate |a+〉. It can be evaluated that Hbin(p(↓|+)) is maximized when p(↓|+) = 1/2. In the same way, we can obtain the device uncertainty for the orthogonal state |a−〉 whose value can be different from the state |a+〉 in general. Thus, the device uncertainty in (9) is interpreted as the averaged value of the device imperfection with respect to arbitrary state  . Even though it is averaged quantity, Dψ(A) is sensitive to the measured state. It is because the measuring device can be responded differently for different input states in the most general scenario.
. Even though it is averaged quantity, Dψ(A) is sensitive to the measured state. It is because the measuring device can be responded differently for different input states in the most general scenario.
Differentiated entropy for the uncertainty in measured state
Once we have full characterization of the uncertainty in the measuring devices, it is possible to extrapolate the amount of uncertainty in the original quantum system. Due to the additive nature of entropy, the uncertainty in the original system can be characterized by subtraction of device uncertainty from entropy of the final outcomes, as follows.

Related with the properties, one can find that the quantum uncertainty is equal to entropy when device uncertainty becomes trivial, i.e. D = 0. As the unsharpness of the measuring devices increases, the information that we can extract from the original system decreases so that Q becomes smaller. Thus, the quantity Q characterizes the amount of uncertainty in the measured system whose properties can be summarized as follows.
(Q-i) 0 ≤ Qρ(A) ≤ Hρ(A), which can be found due to the condition (D-i).
(Q-ii) Qρ(A) = Hρ(A) for all states if and only if A is PVM due to the condition (D-ii).
(Q-iii) Qρ(A) = 0 for all states if and only if  with 0 ≤ λ ≤ 1 satisfying
with 0 ≤ λ ≤ 1 satisfying  due to the condition (D-iii).
due to the condition (D-iii).
(Q-iv) A convex combination of two POVMs cannot increase the quantum uncertainty. This is also trivial by using the condition (D-iv). An increase of entropy is same with an increase of the device uncertainty by Hbin(p) for the convex combination of two POVMs. Thus, as they are canceled each other, the quantum uncertainty is invariant.
Thus, using the quantities, we can divide the total uncertainty characterized by entropy into device and quantum uncertainties as depicted in Fig. 3.

Sum of the device and the quantum uncertainties are the same with entropy. Thus, we distinguish the uncertainty according to where it comes from.
Device uncertainty and entropic UR under white noise
Entropic UR (2) tells us that there is a fundamental limit to prepare a state providing definitive outcomes of two incompatible observables simultaneously. Under the consideration of POVM, however, unsharpness of measuring devices affects lower bounds of the entropic UR as the device uncertainty becomes the lower bound of entropy for single observable. Due to the additive nature of entropy, summation of device uncertainties for more than two observable can also be taken as a lower bound of the composite entropies. In other words, unsharpness affects on lower bounds of entropic UR in an additive way. In order to investigate the effects of unsharpness on lower bound of entropic URs, we will consider an observable with an addition white noise, as follows.
Let us consider unsharp measurements Aα constructed by adding white noise on sharp measurements in d-dimensional quantum system. Thus each positive operator corresponding to i-th outcome of measurement A is defined in the form of

with a mixedness parameter 0 ≤ α ≤ 1. The white noise has been taken into account as a representative noise model, especially when we discuss joint measurability21,22,23. In this case, device uncertainty has a value as follows,

where  . The white noise acts equally on measurements regardless of states, so that the device uncertainty is only determined by α, i.e. state-independent. It can be found that the device uncertainty is monotonically decreasing function of α and the behavior is homogenous for different dimensions d. In the following, we will derive lower bounds of entropic URs for these unsharp measurements.
. The white noise acts equally on measurements regardless of states, so that the device uncertainty is only determined by α, i.e. state-independent. It can be found that the device uncertainty is monotonically decreasing function of α and the behavior is homogenous for different dimensions d. In the following, we will derive lower bounds of entropic URs for these unsharp measurements.
Let us consider two unsharp measurements Aα and Bβ constructed under the model of white noise that acts on arbitrary orthonormal bases {|ai〉} and {|bj〉} as in (11) respectively. Relation between them is characterized by the inner product of the bases Uij = 〈ai|bj〉. In that case, the composite entropies Hρ(A) + Hρ(B) is bounded by the constraint of quantum incompatibility in addition to the device uncertainties. The lower bound can be obtained by straightforward induction

with Massen-Uffink(MU) bound7  determined by the inner product between the maximal orthonormal bases {|ai〉} and {|bi〉}, of which proof is provided at the Method section.
determined by the inner product between the maximal orthonormal bases {|ai〉} and {|bi〉}, of which proof is provided at the Method section.
The bound  in (18) is given by the addition of the smaller device uncertainty to MU bound. The bound
in (18) is given by the addition of the smaller device uncertainty to MU bound. The bound  , therefore, is written by the decomposition of two terms. The first term stands for incompatibility of two observables and the second term is to represent the device uncertainty from unsharpness. Additionally, the bound
, therefore, is written by the decomposition of two terms. The first term stands for incompatibility of two observables and the second term is to represent the device uncertainty from unsharpness. Additionally, the bound  is optimized for mutually unbiased bases as it is saturated by eigenstates of an observable to have bigger unsharpness. However,
is optimized for mutually unbiased bases as it is saturated by eigenstates of an observable to have bigger unsharpness. However,  does not take the optimal value at the other extreme. The bound does not saturate the lower bound in the limit of two identity POVMs, α = β = 0, having the identical bases
does not take the optimal value at the other extreme. The bound does not saturate the lower bound in the limit of two identity POVMs, α = β = 0, having the identical bases  . It is because the bound have smaller values than the sum of entropies, H(Aα) + H(Bβ) whose lower bound is given by device uncertainties,
. It is because the bound have smaller values than the sum of entropies, H(Aα) + H(Bβ) whose lower bound is given by device uncertainties,

as to be consistent with (7). The bound  is, therefore, not well-saturated since device uncertainties give us a stronger bound itself even for incompatible orthonormal bases. In order to inspect the differences in detail, we consider more general bound of entropic UR using majorization relation in the following.
is, therefore, not well-saturated since device uncertainties give us a stronger bound itself even for incompatible orthonormal bases. In order to inspect the differences in detail, we consider more general bound of entropic UR using majorization relation in the following.
Entropic uncertainty relation under majorization relation
We now show how to obtain an improved bound of entropic UR which is derived from the majorization relation of two incompaitible measurements. The bound is new characterization of entropic UR which factors out the contribution of device uncertainty and it provides the stronger quantification of entropic UR than the most recent one24. The majorization approach has been also extended to the cases with the generalized entropies recently25 For the characterization, let us first introduce the recent entropic uncertainty based upon the majorization relation as

which is proposed for arbitrary orthonormal bases A and B described by  and
and  , respectively. The lower bound H(W) is Shonnon entropy of the majorized probability distribution
, respectively. The lower bound H(W) is Shonnon entropy of the majorized probability distribution  whose elements are defined as
whose elements are defined as

where  and
and  are subsets of
are subsets of  and
and  denotes the number of components of
denotes the number of components of  similarly for
similarly for  (see ref. 26,27 for detailed descriptions). Using these coefficients, the direct-sum majorization relation is written as
(see ref. 26,27 for detailed descriptions). Using these coefficients, the direct-sum majorization relation is written as

with the definition  , where
, where  means that a m-dimensional vector
means that a m-dimensional vector  is majorized by a vector
is majorized by a vector  , i.e.
, i.e.  for 1≤ k≤ m − 1 with
for 1≤ k≤ m − 1 with  . The downarrow denotes the vector elements that are sorted in decreasing order, i.e.
. The downarrow denotes the vector elements that are sorted in decreasing order, i.e.  .
.
Let us take into account the differentiated entropy of unsharp measurement Aα for the quantum uncertainty in (10). Under the consideration of the measurement with white noise in (11), the uncertainty in a quantum state can take the form,

where each probability is denoted by  , and the function f is concave for 0 ≤ p ≤ 1 and 0 ≤ α ≤ 1. Explicit form of the function can be found as
, and the function f is concave for 0 ≤ p ≤ 1 and 0 ≤ α ≤ 1. Explicit form of the function can be found as

For another measurement, saying Bβ, the quantum uncertainty Qρ(Bβ) can also be obtained in a similar manner. In the case, it can be found that the quantum uncertainties Qρ(Aα) and Qρ(Bβ) are Schur-concave functions with respect to probability distributions  and
and  , respectively. Subsequently, it is also possible to prove that they satisfy the following inequalities,
, respectively. Subsequently, it is also possible to prove that they satisfy the following inequalities,



where the second line is obtained from a property f(p, α) ≥ f(p, β) for α ≥ β and the third line follows since Schur-concave functions preserve the partial order induced by majorization relation (17) together with the fact that f(1, α) = f(0, α) = 0. From the relations, an entropic URs is derived in the form of

where  gives stronger characterization than H(W) that becomes equal to
gives stronger characterization than H(W) that becomes equal to  only when α = β = 1, i.e. both measurements are sharp. This bound depends on larger unsharpness, so that whenever at least one of measurements is extremely unsharp, i.e. min[α, β] = 0, the bound
only when α = β = 1, i.e. both measurements are sharp. This bound depends on larger unsharpness, so that whenever at least one of measurements is extremely unsharp, i.e. min[α, β] = 0, the bound  is reduced to
is reduced to  . Nevertheless, important point is that the bound
. Nevertheless, important point is that the bound  is always bigger than total device uncertainty
is always bigger than total device uncertainty  for incompatible orthonormal bases, while
for incompatible orthonormal bases, while  may not.
may not.
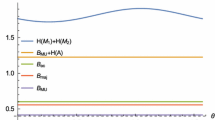
In order to clearly see the effect of unsharpness on lower bounds  ,
,  ,
,  and −logC in (2), let us take into account a pair of unsharp measurements Xη, Zζ for spin systems described by
and −logC in (2), let us take into account a pair of unsharp measurements Xη, Zζ for spin systems described by

with 0 ≤ η, ζ ≤ 1, respectively, where θ is polar angle between directions of measurements. In this simple example, the incompatibility is determined by the angle θ, and, on the other hand, the unsharpness is by η, ζ. When both measurements are sharp, i.e. η = ζ = 1, the bounds  and
and  are reduced to the original MU bound and the bound in (15), respectively, as depicted in Fig. 4(a). For mutually unbiased bases, i.e. θ = π/2,
are reduced to the original MU bound and the bound in (15), respectively, as depicted in Fig. 4(a). For mutually unbiased bases, i.e. θ = π/2,  is optimized to be log 2, whereas
is optimized to be log 2, whereas  is not. However, for |π/2−θ| > 0.15,
is not. However, for |π/2−θ| > 0.15,  becomes stronger than
becomes stronger than  . Comparing Fig. 4(b) to Fig. 4(a), we can find out that the measurements Zζ becomes unsharp, so that total device uncertainty
. Comparing Fig. 4(b) to Fig. 4(a), we can find out that the measurements Zζ becomes unsharp, so that total device uncertainty  increases and surpasses −logC and
increases and surpasses −logC and  for |π/2−θ| > 0.47 and |π/2−θ| > 0.33, respectively. Only
for |π/2−θ| > 0.47 and |π/2−θ| > 0.33, respectively. Only  gives us stronger one than
gives us stronger one than  . Subsequently, Fig. 4(c) shows that as unsharpness increases, −logC becomes smaller than
. Subsequently, Fig. 4(c) shows that as unsharpness increases, −logC becomes smaller than  over the entire range of θ. With increasing the unsharpness, the gap between −logC and
over the entire range of θ. With increasing the unsharpness, the gap between −logC and  is being large as shown in Fig. 4(d). Therefore, we identify that the effect of unsharpness should be considered for nontrivial unsharp measurements, and, in particular, at sufficiently large unsharpness it becomes a dominant factor in entropic URs.
is being large as shown in Fig. 4(d). Therefore, we identify that the effect of unsharpness should be considered for nontrivial unsharp measurements, and, in particular, at sufficiently large unsharpness it becomes a dominant factor in entropic URs.
 (orange dot-dashed lines),
(orange dot-dashed lines),  (blue dashed lines), −logC (purple dotted lines), and
(blue dashed lines), −logC (purple dotted lines), and  (red solid lines) for spin observables Xη and Zζ with respect to angle θ.
(red solid lines) for spin observables Xη and Zζ with respect to angle θ.
In Figure (a), we denote −logC and  together by orange dot-dashed lines. And four the other graphs are sequentially presented for different unsharpnesses, and accordingly it is observed that the bounds become larger as unsharpness increases. We can analyze their behaviors as comparing the bounds to device uncertainty, and it is identified that −logC is strictly lower than device uncertainty at large unsharpness.
together by orange dot-dashed lines. And four the other graphs are sequentially presented for different unsharpnesses, and accordingly it is observed that the bounds become larger as unsharpness increases. We can analyze their behaviors as comparing the bounds to device uncertainty, and it is identified that −logC is strictly lower than device uncertainty at large unsharpness.
Entropic uncertainty relation from device uncertainty
In the above, we have seen that the unsharpness can give rise to the nontrivial lower bound  under white noise model. Generalizing this approach, in this section, let us show that nontrivial lower bounds can be obtained for unsharp measurements by using the property of device uncertainty as following. First of all, let us consider a pair of unsharp measurements A and B in
under white noise model. Generalizing this approach, in this section, let us show that nontrivial lower bounds can be obtained for unsharp measurements by using the property of device uncertainty as following. First of all, let us consider a pair of unsharp measurements A and B in  , of which the numbers of outcomes are denoted by n and m, respectively. Then the inequalities in (7) is directly applicable in this way,
, of which the numbers of outcomes are denoted by n and m, respectively. Then the inequalities in (7) is directly applicable in this way,

where the second inequality is obtained by diagonalizing  and taking the lowest eigenvalue. Even though the bound
and taking the lowest eigenvalue. Even though the bound  vanishes for sharp measurements due to the property (D-iii), it is considerable at sufficiently large unsharpness.
vanishes for sharp measurements due to the property (D-iii), it is considerable at sufficiently large unsharpness.
As an example of nontrivial noise models, let us take into account unsharp measurements XAD and ZAD constructed in  by adding amplitude damping noise on the measurement of mutually unbiased bases
by adding amplitude damping noise on the measurement of mutually unbiased bases  ,
,  such that
such that

where ex is transition probability (similarly for ZAD). This amplitude damping model imposes distinct noise effects with respect to states, which means that device uncertainty coming from the amplitude damping is state-dependent such that

where  for given states
for given states  . The device uncertainty, thus, vanishes for a given state |x0〉. In the same manner, device uncertainty of ZAD vanishes for |z0〉. That means each device uncertainty can vanish for specific states. Under consideration of Dρ(XAD) and Dρ(ZAD) together, however, they do not vanish simultaneously. This behavior is charactrized by means of the bound
. The device uncertainty, thus, vanishes for a given state |x0〉. In the same manner, device uncertainty of ZAD vanishes for |z0〉. That means each device uncertainty can vanish for specific states. Under consideration of Dρ(XAD) and Dρ(ZAD) together, however, they do not vanish simultaneously. This behavior is charactrized by means of the bound  , which is given in this case by
, which is given in this case by

with the condition ex = ez = e for simplicity. Therefore, it is found that minimizing total device uncertainty over states can give rise to nontrivial bound, even though each device uncertainty vanishes. Furthermore, comparing it to −logC in (2) obtained as  , it is observed that
, it is observed that  becomes stronger than −logC when e > 0.564…, as depicted in Fig. 5.
becomes stronger than −logC when e > 0.564…, as depicted in Fig. 5.
 (solid red line) according to the transition probability e for XAD and ZAD in 3-dimensional system.
(solid red line) according to the transition probability e for XAD and ZAD in 3-dimensional system.
Shape of  is given symmetrically with respect to e, while −logC decreases. At large e,
is given symmetrically with respect to e, while −logC decreases. At large e,  becomes bigger than −logC.
becomes bigger than −logC.
Discussion
We have studied the effects of unsharpness on entropic uncertainty. As the first step, we have formulated the device uncertainty (6) as a measure of unsharpness, and investigated its properties in line with previous works19. The most important property among them is that the device uncertainty gives us a lower bound of the entropy by itself and also can be minimized over states as shown in (7).
Using the device uncertainty, we have investigated the effect of unsharp measurements in entropic URs and observed the behavior for the lower bound to become larger by increasing the unsharpness in specific noise models such as white noise and amplitude damping. Under the white noise, device uncertainty is given as state-independent values (12). In that case, we have obtained two forms of lower bounds in entropic URs denoted by  and
and  . Distinct feature they share is that they are written in the decomposed forms by discriminating the unsharpness in measuring devices. From this fact, it becomes possible to clearly observe the effect of unsharp measurement. Also, comparing these bounds to −logC in two-dimensional system, it is identified that the bounds
. Distinct feature they share is that they are written in the decomposed forms by discriminating the unsharpness in measuring devices. From this fact, it becomes possible to clearly observe the effect of unsharp measurement. Also, comparing these bounds to −logC in two-dimensional system, it is identified that the bounds  and
and  can be stronger than −logC, and furthermore −logC becomes strictly weaker than the device uncertainty
can be stronger than −logC, and furthermore −logC becomes strictly weaker than the device uncertainty  at large unsharpness as shown in Fig. 4.
at large unsharpness as shown in Fig. 4.
In order to see the effect of unsharpness, we have derived the entropic UR in (24) for a pair of unsharp measurements by using the property of the device uncertainty. As a result, the lower bound  originating from the unsharpness has been obtained and compared to −logC in a specific example to show its validity as a nontrivial bound. As one of noise models, we take into account the amplitude damping model in three-dimensional system. In this case, each device uncertainty of the unsharp measurement is state-dependent and vanishes for specific states. A notable point, nevertheless, is that the nonzero bound
originating from the unsharpness has been obtained and compared to −logC in a specific example to show its validity as a nontrivial bound. As one of noise models, we take into account the amplitude damping model in three-dimensional system. In this case, each device uncertainty of the unsharp measurement is state-dependent and vanishes for specific states. A notable point, nevertheless, is that the nonzero bound  in (26) has been obtained from the relation in (24). Furthermore, it is observed that −logC in (2) becomes smaller than
in (26) has been obtained from the relation in (24). Furthermore, it is observed that −logC in (2) becomes smaller than  at sufficiently large unsharpness as shown in Fig. 5. Conclusively, the results so far consistently show that the effect of the unsharpness in the entropic UR is considerably large, and thus should be taken into account to develop the entropic UR for unsharp measurements. More generalization of the uncertainty relation can be studied when we consider more than two measurements for a single system. We leave them to a future investigation.
at sufficiently large unsharpness as shown in Fig. 5. Conclusively, the results so far consistently show that the effect of the unsharpness in the entropic UR is considerably large, and thus should be taken into account to develop the entropic UR for unsharp measurements. More generalization of the uncertainty relation can be studied when we consider more than two measurements for a single system. We leave them to a future investigation.
Methods
The proof of the second relation in (7)
The second relation in (7)
The device uncertainty is larger than the lower bound of (4),

for all states ρ.
Proof. The device uncertainty can be written as for any POVM

where d is the dimension of Hilbert space, and n is the number of elements of POVM. Due to −logx is decreasing function for positive x, we can find out

The last line comes from the completeness relation satisfied by POVM.
Proofs of the conditions (D-i)-(D-iv)
We will show the proof of the conditions (D-i)-(D-v) for the general device uncertainty (6) in consecutive order.
Condition (D-i)
0 ≤ Dρ(A) ≤ Hρ(A).
Proof. Entropy of probability distribution {pi} of outcomes of measurement A described by POVM {Âi} is written by

where the probability of i th outcome is given by

with decomposed form of positive operator  . Since eigenvectors
. Since eigenvectors  of Âi satisfy the completeness relation, pi is written as the convex combination of eigenvalues
of Âi satisfy the completeness relation, pi is written as the convex combination of eigenvalues  's. Therefore, using the concavity of −xlog x20,
's. Therefore, using the concavity of −xlog x20,

In addition, according to the restriction of POVM, i.e. completeness and positivity, the device uncertainty should be positive. As a result, it is proved

QED.
Condition(D-ii)
Dρ(A) = Hρ(A) for all states if and only if all positive operators of A is in the form of  with 0 ≤ λi ≤ 1 satisfying
with 0 ≤ λi ≤ 1 satisfying  .
.
Proof. The left direction of proof is trivial. Thus let us prove the right direction. If Dρ(A) = Hρ(A) for all states, then we can obtain the following equation

for all sates. Then each i th term in the bracket is always positive due to the concavity of the function, −xlog x. Thus all i th term should be zero. Then we can choose the input state to be a superposition of two eigenstates of  , since it should be satisfied for all states. For example, in a case we take it as
, since it should be satisfied for all states. For example, in a case we take it as  , where
, where  , i the term becomes simple form and it should be zero such as
, i the term becomes simple form and it should be zero such as

As taking partial derivartive of  , we can obtain the minimum value of the left hand side at
, we can obtain the minimum value of the left hand side at  , and its value is given by 0. Otherwise, it is always strictly positive. Thus for (32) to vanish,
, and its value is given by 0. Otherwise, it is always strictly positive. Thus for (32) to vanish,  and
and  should be same. Then as taking the input state to be superposition of all combination of eigenstates, it can be shown that all eigenvalues
should be same. Then as taking the input state to be superposition of all combination of eigenstates, it can be shown that all eigenvalues  's must be same, which means
's must be same, which means  is in the form of
is in the form of  . QED
. QED
Condition(D-iii)
Dρ(A) = 0 for all states if and only if A is PVM.
Proof. The observable A is PVM if and only if eigenvalues of all operators,  , should be given by 0 or 1, i.e.
, should be given by 0 or 1, i.e.  . And Dρ(A) = 0 for all states is also equivalent with the condition all
. And Dρ(A) = 0 for all states is also equivalent with the condition all  , since the device uncertainty vanish for all states means
, since the device uncertainty vanish for all states means  for all i, k. QED
for all i, k. QED
Condition(D-iv)
A convex combination of two POVMs cannot be sharper than these two POVMs themselves.
Proof. A convex combination of two POVMs A and B, acting on same quantum system described by  with probabilities p and 1−p satisfying 0 ≤ p ≤ 1 respectively, is denoted by
with probabilities p and 1−p satisfying 0 ≤ p ≤ 1 respectively, is denoted by

The decomposed form of the convex combination of A and B is written by

Thus eigenvalues of each element of A and B are multiplied by p and (1−p), respectively. That means the device uncertainty of combined POVM is given by


As a result, the convex combination of two POVMs increases by Hbin(p).QED
Proof of (18)
Let us consider sharp observables A and B in  associated with the orthonormal bases
associated with the orthonormal bases  and
and  , respectively. And we assume that white noise acts on
, respectively. And we assume that white noise acts on  such as (11) and similarly for B. Consequently, A and B become unsharp observables Aα and Bβ, respectively.
such as (11) and similarly for B. Consequently, A and B become unsharp observables Aα and Bβ, respectively.
Before proving (18), we define entropic URs for sharp measurements in mixed states  as
as

with the von Neumann entropy S(ρ) = −Tr(ρlogρ), which is the reduced form of the entropic UR derived for bipartite system15. According to dual map, we have a relation such that

with definitions  and
and  . In this case, device uncertainty of Aα have the same value with von Neumann entropy of ρα, i.e. S(ρα) = D(Aα). Using these relations, the relation (37) is rewritten in the from of
. In this case, device uncertainty of Aα have the same value with von Neumann entropy of ρα, i.e. S(ρα) = D(Aα). Using these relations, the relation (37) is rewritten in the from of

for the case of white noise. With the fact that H(Aα) ≥ H(Aβ) if α ≤ β, we have following result

where the right hand side coincides with  . QED
. QED
Additional Information
How to cite this article: Baek, K. and Son, W. Unsharpness of generalized measurement and its effects in entropic uncertainty relations. Sci. Rep. 6, 30228; doi: 10.1038/srep30228 (2016).
References
Heisenberg, W. J. Über den anschaulichen Inhalt der quantentheoretischen Kinematik und Mechanik. Zeitschrift fur Physik 43, 172 (1927).
Busch, P., Heinonen, T. & Lahti, P. Heisenberg’s uncertainty principle, Physics Reports 452, 155–176, 10.1016/j.physrep.2007.05.006 (2007).
Robertson, H. P. The uncertainty principle. Phys. Rev. 34, 163–164, 10.1103/PhysRev.34.163 (1929).
Uffink, J. B. M. Measures of Uncertainty and the Uncertainty Principle. Ph.D. thesis, University of Utrecht (1990).
Deutsch, D. Uncertainty in quantum measurements. Phys. Rev. Lett. 50, 631–633, 10.1103/PhysRevLett.50.631 (1983).
Białynicki-Birula, I. & Mycielski, J. Uncertainty relations for information entropy in wave mechanics. Communications in Mathematical Physics 44, 129–132 (1975).
Maassen, H. & Uffink, J. B. M. Generalized entropic uncertainty relations. Phys. Rev. Lett. 60, 1103–1106, 10.1103/PhysRevLett.60.1103 (1988).
Baek, K., Farrow, T. & Son, W. Optimized entropic uncertainty for successive projective measurements. Phys. Rev. A 89, 032108, 10.1103/PhysRevA.89.032108 (2014).
Peres, A. & Wootters, W. K. Optimal detection of quantum information. Phys. Rev. Lett. 66, 1119–1122, doi/10.1103/PhysRevLett.66.1119 (1991).
Krishna, M. & Parthasarathy, K. R. An entropic uncertainty principle for quantum measurements. Sankhyā: The Indian Journal of Statistics, Series A (1961–2002) 64, 842–851 (2002).
Tomamichel, M. A Framework for Non-Asymptotic Quantum Information Theory. Ph.D. thesis, ETH Zurich (2012).
Coles, P. J. & Piani, M. Improved entropic uncertainty relations and information exclusion relations. Phys. Rev. A 89, 022112, 10.1103/PhysRevA.89.022112 (2014).
Coles, P. J., Berta, M., Tomamichel, M. & Wehner, S. Entropic uncertainty relations and their applications. arXiv:1511.04857 (2015).
Rastegin, A. E. Entropic uncertainty relations for extremal unravelings of super-operators. Journal of Physics A: Mathematical and Theoretical 44, 095303, 10.1088/1751-8113/44/9/095303 (2011).
Berta, M., Christandl, M., Colbeck, R., Renes, J. M. & Renner, R. The uncertainty principle in the presence of quantum memory. Nat Phys 6, 659–662, 10.1038/nphys1734 (2010).
Coles, P. J., Yu, L., Gheorghiu, V. & Griffiths, R. B. Information-theoretic treatment of tripartite systems and quantum channels. Phys. Rev. A 83, 062338, 10.1103/PhysRevA.83.062338 (2011).
Heinosaari, T., Reitzner, D. & Stano, P. Notes on joint measurability of quantum observables. Foundations of Physics 38, 1133–1147 (2008).
Busch, P. On the sharpness and bias of quantum effects. Foundations of Physics 39, 712–730 (2009).
Massar, S. Uncertainty relations for positive-operator-valued measures. Phys. Rev. A 76, 042114, 10.1103/PhysRevA.76.042114 (2007).
Cover, T. M. & Thomas, J. A. Elements of Information Theory, Second edn (Wiley-Interscience, NY, USA, 1991).
Heinosaari, T., Kiukas, J., Reitzner, D. & Schultz, J. Incompatibility breaking quantum channels. Journal of Physics A: Mathematical and Theoretical 48, 435301, 10.1088/1751-8113/48/43/435301 (2015).
Uola, R., Moroder, T. & Gühne, O. Joint measurability of generalized measurements implies classicality. Phys. Rev. Lett. 113, 160403, 10.1103/PhysRevLett.113.160403 (2014).
Karthik, H. S., Devi, A. R. U. & Rajagopal, A. K. Joint measurability, steering, and entropic uncertainty. Phys. Rev. A 91, 012115, 10.1103/PhysRevA.91.012115 (2015).
Rudnicki, L., Puchała, Z. & Życzkowski, Z. K. Strong majorization entropic uncertainty relations. Phys. Rev. A 89, 052115, 10.1103/PhysRevA.89.052115 (2014).
Rastegin, A. E. & Życzkowski, Z. K. Majorization entropic uncertainty relations for quantum operations. arXiv:1511.07099 (2015).
Friedland, S., Gheorghiu, V. & Gour, G. Universal uncertainty relations. Phys. Rev. Lett. 111, 230401, 10.1103/PhysRevLett.111.230401 (2013).
Puchała, Z., Rudnicki, Ł. & Życzkowski, K. Majorization entropic uncertainty relations. Journal of Physics A: Mathematical and Theoretical 46, 272002, 10.1088/1751-8113/46/27/272002 (2013).
Acknowledgements
This work was done with support of ICT R&D program of MSIP/IITP (No. 2014-044-014- 002), the R&D Convergence Program of NST of Republic of Korea (Grant No. CAP-15-08-KRISS) and National Research Foundation (NRF) grant (No. NRF- 2013R1A1A2010537).
Author information
Authors and Affiliations
Contributions
W.S. suggest the major formalism and K.B. performed detailed calculation. K.B. and W.S. contribute to the manuscript preparation more or less equally.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Baek, K., Son, W. Unsharpness of generalized measurement and its effects in entropic uncertainty relations. Sci Rep 6, 30228 (2016). https://doi.org/10.1038/srep30228
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep30228
- Springer Nature Limited
This article is cited by
-
Manipulating the measured uncertainty under Lee-Yang dephasing channels through local \({\cal P}{\cal T}\)-symmetric operations
Frontiers of Physics (2023)
-
Quantifying Unsharpness of Observables in an Outcome-Independent way
International Journal of Theoretical Physics (2022)
-
Generalized entropies, density of states, and non-extensivity
Scientific Reports (2020)