
Abstract
We propose a mechanisms-based viscoplasticity approach for metals and alloys. First, we derive a stochastic model for thermally-activated motion of dislocations and, then, introduce power-law flow rules. The overall plastic deformation includes local plastic slip events taken with an appropriate weight assigned to each angle of the plane misorientation from the direction of maximum shear stress. As deformation progresses, the material experiences successive reorganizations of the slip systems. The microstructural evolution causes that a portion of energy expended on plastic deformation is dissipated and the rest is stored in the defect structures. We show that the reorganizations are stable in a homogeneously deformed material. The concept is tested for steel 304L, where we reproduce experimentally obtained stress-strain responses, we construct the Frost-Ashby deformation map and predict the rate of the energy storage. The storage is assessed in terms of synchronized measurements of temperature and displacement distributions on the specimen surface during tensile loading.
Similar content being viewed by others

Introduction
Despite significant advances in modeling the inelastic behavior of polycrystalline materials, our understanding of the deformation mechanisms is still incomplete. Temperature, strain rate and strain range alter mechanical properties of the materials, shift the source of the material’s nonlinearity within different levels of the internal structure, thus making the behavior hierarchical in nature1. At early stages of plastic deformation, dislocations nucleate, multiply and move freely within grains. As the deformation process continues, grain boundaries and other defects obstruct the dislocation mobility. We know that plastic work is not fully dissipated and a measurable portion of it adds to internal energy of the deformed materials. This energy has been discovered in calorimetric tests performed by Taylor and Quinney2. For many years, based on their work, the part of the work converted to internal energy and stored in the metallic material has been considered to be a constant value of about ten percent of the entire plastic work. Further experimental studies have shown that this estimation is wrong3,4,5,6,7 and, in fact, the ratio of the energy is not constant and depends on the deformation level of the tested material. Consequently, a concept of the energy storage rate is proposed8,9,10,11. The stored energy results from the evolution of the microstructure and is an essential measure of its cold work state12. Consequently, the microstructural reorganizations increase internal energy of the material. The energy storage is often mitigated by a partial restoration of the grain shape due to the relaxation of dislocation pileups, dynamic recrystallization and/or grain boundary sliding.
Since seventies, constitutive modeling is steadily migrating from purely phenomenological descriptions toward the approaches which are based on micromechanics considerations. The phenomenology means that the models offer reliable responses but only within the domain already verified by experiment. Often, extrapolation of the behavior to the regimes not tested can be troublesome. The introduction of crystal plasticity approaches13,14,15 significantly improves the predictability by correctly specifying the mechanisms of plastic slip. In our approach, we attempt to bridge the benefits of the phenomenology with the advantages of the micromechanics based descriptions. The study consist of four sections. First, we develop a generalized concept of the thermally activated motion of dislocation. Next, we propose a Tresca-type stochastic concept, where the dominant plastic deformation is collected from slip systems placed on the plane defined by the maximum and minimum principal stresses. As a result, we introduce an average Schmid factor. The factor encapsulates the relevant information about the evolving configuration of the active systems. Also, we provide a micromechanisms-based interpretation of the energy storage rate. We point into the conditions, at which the microstructural evolution may become unstable. Lastly, we introduce a visco-plasticity model capable of capturing metal responses within a broad range of strain rates and temperatures.
Results
Notation
Dyadic product: n n corresponds to ninj, where in Cartesian coordinate system i, j = 1, 3
Inner product of second order tensors:  is
is 
Product of tensors:  is
is 
Thermally activated motion of dislocations
The thermally activated motion of dislocations and subsequent dislocation interactions are reflected in activation free energy  , where Ea and Sa are the activation energy and activation entropy16. We introduce the non-dimensional function
, where Ea and Sa are the activation energy and activation entropy16. We introduce the non-dimensional function  , where kb is Boltzmann constant and T is temperature. The processes are stochastic with respect to
, where kb is Boltzmann constant and T is temperature. The processes are stochastic with respect to  and, therefore, frequency of the dislocation-triggered events follows a statistical distribution and is assumed here to be the Weibull distribution
and, therefore, frequency of the dislocation-triggered events follows a statistical distribution and is assumed here to be the Weibull distribution  . An increase in the entropic contribution SaT makes the material softer and strength is reduced. The material is expected to experience the events with a frequency fD(T) and with the rate defined by the exponent ka. In a collective sense, the dislocation activities at temperature T include all the events available up to this temperature with the appropriate frequencies. These events effectively reduce the material’s resistance to plastic flow. Therefore, the actual resistance AD is integrated over the frequencies in the domain taken between Tc/Tm and Tc/T and, then, we have
. An increase in the entropic contribution SaT makes the material softer and strength is reduced. The material is expected to experience the events with a frequency fD(T) and with the rate defined by the exponent ka. In a collective sense, the dislocation activities at temperature T include all the events available up to this temperature with the appropriate frequencies. These events effectively reduce the material’s resistance to plastic flow. Therefore, the actual resistance AD is integrated over the frequencies in the domain taken between Tc/Tm and Tc/T and, then, we have  . The variable s defines the pathway of temperature Tc/T. The activation factor AD is a measure of thermal softening. At temperatures higher from the transition temperature Tc the material becomes increasingly softer and its strain rate sensitivity increases. Often, the transition occurs at temperature close to Tm/3, where Tm is melting temperature. In here, the activation energy is expressed in terms of kbTc such that
. The variable s defines the pathway of temperature Tc/T. The activation factor AD is a measure of thermal softening. At temperatures higher from the transition temperature Tc the material becomes increasingly softer and its strain rate sensitivity increases. Often, the transition occurs at temperature close to Tm/3, where Tm is melting temperature. In here, the activation energy is expressed in terms of kbTc such that  . When entropy is assumed to be weakly dependent on temperature, then at melting point Fa(Tm) = 0 we have Sa = Ea/Tm. Consequently, the activation factor becomes
. When entropy is assumed to be weakly dependent on temperature, then at melting point Fa(Tm) = 0 we have Sa = Ea/Tm. Consequently, the activation factor becomes

where ga determines the magnitude of the activation energy. At the solidus temperature, where  , the dislocation activities are replaced by diffusional flow. At very low temperature, the factor AD is only slightly smaller from one and the material exhibits high resistance to plastic deformation.
, the dislocation activities are replaced by diffusional flow. At very low temperature, the factor AD is only slightly smaller from one and the material exhibits high resistance to plastic deformation.
Deformation-induced slip reorganization
In the Tresca-like material, the macroscopically observed plastic strain rate  follows the direction of maximum shear stress and is
follows the direction of maximum shear stress and is

The magnitude of the plastic strain rate  is affected not only by shear stress and temperature but also is sensitive to the evolving slip configuration. Components of the strain rate
is affected not only by shear stress and temperature but also is sensitive to the evolving slip configuration. Components of the strain rate  are defined in terms of the dyadic product
are defined in terms of the dyadic product  . The unite vectors
. The unite vectors  and
and  are orthogonal and are determined by the current stress σ. We construct the stress representation
are orthogonal and are determined by the current stress σ. We construct the stress representation  , which must retain the properties of the dyadic product
, which must retain the properties of the dyadic product  , thus
, thus  ,
,  and
and  . This expression has already been derived17 and is
. This expression has already been derived17 and is

where the angle is  . The second and third invariants of stress deviator
. The second and third invariants of stress deviator  are J2 and J3. Note that the expression produces singular responses when the angle φ approaches the values ±π/2. These points correspond to the corners on the Tresca stress envelop.
are J2 and J3. Note that the expression produces singular responses when the angle φ approaches the values ±π/2. These points correspond to the corners on the Tresca stress envelop.
Plastic deformation is collected from many slip planes with orientations distributed around the plane of maximum shear stress. Each such θ-active plane is defined in terms of orthogonal triad  , where identity tensor is
, where identity tensor is  and slip occurs on the planes defined by the unite vectors
and slip occurs on the planes defined by the unite vectors  and
and  . Plastic deformation in each grain is sensitive to the grain orientation and is dependent on the grain size and shape. Incoherencies of the deformation at grain boundaries and in the presence of other defects permanently distort the lattice and are responsible for an increase of internal energy. Consequently, these incoherencies in a plastically deformed material broaden the angular spectrum of the active slip systems. It is worth noting that at large plastic deformation the spectrum tightens again18 and the material may experience localized plastic deformation. In here, we narrow the study to the conditions, where the localized shear bands are not present. Further discussion on the conditions, which lead to the formation of shear bands, is presented in the next section. The vectors
. Plastic deformation in each grain is sensitive to the grain orientation and is dependent on the grain size and shape. Incoherencies of the deformation at grain boundaries and in the presence of other defects permanently distort the lattice and are responsible for an increase of internal energy. Consequently, these incoherencies in a plastically deformed material broaden the angular spectrum of the active slip systems. It is worth noting that at large plastic deformation the spectrum tightens again18 and the material may experience localized plastic deformation. In here, we narrow the study to the conditions, where the localized shear bands are not present. Further discussion on the conditions, which lead to the formation of shear bands, is presented in the next section. The vectors  and
and  and their rotations occur on the plane defined by the maximum and minimum principal stresses. The
and their rotations occur on the plane defined by the maximum and minimum principal stresses. The  -planes undergo rotations such that
-planes undergo rotations such that

The plastic strain rate  incorporates slip rates from the entire spectrum of the slip orientations, where the slip contributions vary and depend on the current angle
incorporates slip rates from the entire spectrum of the slip orientations, where the slip contributions vary and depend on the current angle  . In the representative volume of the materials, we have a large number of such systems and, therefore, we assume that the orientations are continuously distributed about the plane of maximum shear stress. The distribution
. In the representative volume of the materials, we have a large number of such systems and, therefore, we assume that the orientations are continuously distributed about the plane of maximum shear stress. The distribution  of the slip contributions is taken for angles between ±π/4. The form of the distribution is sufficiently general when constructed as follows
of the slip contributions is taken for angles between ±π/4. The form of the distribution is sufficiently general when constructed as follows

where we assure that  and
and  is gamma function. The exponent r determines the shape of the distribution. We note that the larger the exponent is the broader the distribution becomes, Fig. 1. At advanced deformation, the slip systems sense each other, interact with grain boundaries and other defects. Consequently, the interactions widen the distribution and create the conditions for plastic hardening. At the microscale, the rate of plastic strain
is gamma function. The exponent r determines the shape of the distribution. We note that the larger the exponent is the broader the distribution becomes, Fig. 1. At advanced deformation, the slip systems sense each other, interact with grain boundaries and other defects. Consequently, the interactions widen the distribution and create the conditions for plastic hardening. At the microscale, the rate of plastic strain  is defined as
is defined as

The average Schmid factor M specifies flow constraints, which result from the current orientation of slip systems Ms and is sensitive to the reorientations Mr.
The factor is plotted as a function of the exponent r and is shown for three rates of slip reconfigurations  . Three shapes of the distribution
. Three shapes of the distribution  are presented for exponents r = 0.1, 0.5 and 2.
are presented for exponents r = 0.1, 0.5 and 2.

The equivalent microscopic plastic strain  specifies the slip contribution from each orientation
specifies the slip contribution from each orientation  . Note that the rate of plastic strain
. Note that the rate of plastic strain  is sensitive to the rates of slip
is sensitive to the rates of slip  and rotations
and rotations  ; these two mechanisms occur in a plastically deformed material. The reorientations include grain rotations, result from the lattice distortions between closely spaced slip bands, are caused by the activation of secondary slip systems and there is a possibility that some of the plane become curved19. These rotations reflect the material’s ability for overcoming energy barriers, which are caused by the pre-existing and deformation induced defects. In this manner, the rotations are responsible for the plasticity-induced lattice distortions and cause the storage of energy. The rate of the
; these two mechanisms occur in a plastically deformed material. The reorientations include grain rotations, result from the lattice distortions between closely spaced slip bands, are caused by the activation of secondary slip systems and there is a possibility that some of the plane become curved19. These rotations reflect the material’s ability for overcoming energy barriers, which are caused by the pre-existing and deformation induced defects. In this manner, the rotations are responsible for the plasticity-induced lattice distortions and cause the storage of energy. The rate of the  -strain is weighted with
-strain is weighted with  , hence
, hence  . The subscript “m” in
. The subscript “m” in  indicates that the equivalent strain rate is taken at the microscale. The reorientations (4) are caused by plastic slip and, therefore, we have
indicates that the equivalent strain rate is taken at the microscale. The reorientations (4) are caused by plastic slip and, therefore, we have  , hence
, hence

We multiply Eq. 7 by the flow tensor Nσ. Also, we note that Nσ:Nσ = 2 and, therefore, we compare (2) and (7) and conclude that

Next, we express  and
and  in reference to
in reference to  and
and  , where
, where  and
and  and, then
and, then

The first term in (9) is the rate of plastic strain collected from the current slip systems. The second term represents the contribution of the slip reorientations. The reorientations broaden the distribution  of the available slip systems and, effectively, slow down the flow process. Slip systems that are closely aligned with the direction of maximum shear stress
of the available slip systems and, effectively, slow down the flow process. Slip systems that are closely aligned with the direction of maximum shear stress  do not rotate19,20, while systems at the angles
do not rotate19,20, while systems at the angles  are inactive. As shown20, the slip reorganizations are maximized somewhere between
are inactive. As shown20, the slip reorganizations are maximized somewhere between  and
and  . For this reason, we propose expression
. For this reason, we propose expression  . Consequently, the strain-induced reorientations become
. Consequently, the strain-induced reorientations become  , where the initial slip orientation is
, where the initial slip orientation is  and the reference plastic strain is
and the reference plastic strain is  . When such a plane is perfectly aligned with the direction of maximum shear stress
. When such a plane is perfectly aligned with the direction of maximum shear stress  , then the plane does not rotate. In the case of the misaligned planes
, then the plane does not rotate. In the case of the misaligned planes  , the formula reproduces the experimentally observed trends20. The rotations increase misalignment of the planes from the direction of maximum shear stress. We realize that an advanced plastic deformation promotes the conditions for the formation of shear bands. Hence, the active planes become realigned with the band’s orientations. Accordingly, this realignment is responsible for directional plastic flow. We focus the study on the behavior, where the spectrum of the plane distribution experiences broadening and the plastic flow is isotropic. Consequently, the expression (9) becomes
, the formula reproduces the experimentally observed trends20. The rotations increase misalignment of the planes from the direction of maximum shear stress. We realize that an advanced plastic deformation promotes the conditions for the formation of shear bands. Hence, the active planes become realigned with the band’s orientations. Accordingly, this realignment is responsible for directional plastic flow. We focus the study on the behavior, where the spectrum of the plane distribution experiences broadening and the plastic flow is isotropic. Consequently, the expression (9) becomes

Now, we can write  , where the average Schmid factor is
, where the average Schmid factor is  . From (10), we have
. From (10), we have  and
and  . After integrating we obtain
. After integrating we obtain

As plastic deformation advances, less favorably oriented systems are activated. The factor Ms quantifies these contributions. The reorientations Mr results from direct interactions of the active systems. The reconfigurations reduce the average Schmid factor and further broaden the spectrum of the plane orientations. When slip is perfectly aligned with the direction of maximum shear stress (r → 0), then the average Schmid factor M is equal to one and  , Fig. 1. On the other hand, a uniform distribution of slip contributions
, Fig. 1. On the other hand, a uniform distribution of slip contributions  maximizes the flow constraints. The exponent r evolves as microscopic plastic strain increases
maximizes the flow constraints. The exponent r evolves as microscopic plastic strain increases  . In the simplest scenario, we make the shape of the distribution dependent on temperature and plastic strain and, therefore, we write
. In the simplest scenario, we make the shape of the distribution dependent on temperature and plastic strain and, therefore, we write  and
and  while
while  is a material constant. At high temperatures, the activation factor AD is a small number and, then, the materials exhibits low resistance plastic flow.
is a material constant. At high temperatures, the activation factor AD is a small number and, then, the materials exhibits low resistance plastic flow.
Stability of microstructural evolution
From the requirement of measure invariance (independence from the frame of description) we write  , where the equivalent stress
, where the equivalent stress  is maximum shear stress. From (10), the rate of plastic work becomes
is maximum shear stress. From (10), the rate of plastic work becomes  . The rate of total plastic work is
. The rate of total plastic work is  and the portion
and the portion  is retained as internal energy. This mechanism is traditionally known as the stored energy of cold work. The capacity for storing this energy is evolving in the plastically deformed material. In terms of Helmholtz energy, the first order energy perturbation around equilibrium is
is retained as internal energy. This mechanism is traditionally known as the stored energy of cold work. The capacity for storing this energy is evolving in the plastically deformed material. In terms of Helmholtz energy, the first order energy perturbation around equilibrium is  , where
, where  is the change of internal energy calculated in the reference configuration of the slip systems. We narrow down the analysis to conditions, where heat flux can be neglected. Hence, the perturbation becomes
is the change of internal energy calculated in the reference configuration of the slip systems. We narrow down the analysis to conditions, where heat flux can be neglected. Hence, the perturbation becomes

The material exhibits stable microstructural reconfigurations when  . This condition is satisfied as long as
. This condition is satisfied as long as

where the variable  is
is  . Now, we are ready to introduce the variable
. Now, we are ready to introduce the variable  , which quantifies the rate of plastic work that is stored in the evolving ensemble of slip systems. The available experimental data suggests that plastic deformation slows down the storage11. The condition (13) suggests that a homogeneous deformation produces stable microstructural reconfigurations. The homogeneity can be violated when localized shear bands are formed
, which quantifies the rate of plastic work that is stored in the evolving ensemble of slip systems. The available experimental data suggests that plastic deformation slows down the storage11. The condition (13) suggests that a homogeneous deformation produces stable microstructural reconfigurations. The homogeneity can be violated when localized shear bands are formed  , or the material experiences other damages. The formation of localized shear bands promotes realignment of slip systems. In such a case, the parameter
, or the material experiences other damages. The formation of localized shear bands promotes realignment of slip systems. In such a case, the parameter  should take negative values. This condition can be constructed by assuming that the parameter
should take negative values. This condition can be constructed by assuming that the parameter  is a function of plastic strain and it takes negative values at a critical state of plastic deformation. Also, a strong dynamic excitation may trigger unstable microstructural evolution. We paraphrase the argument by Prigogine21 and state that the instability results from the interplay of three aspects which are always linked in a dissipative material: there is the mechanism of inelastic flow, there are the microstructural reconfigurations and there are the flow fluctuations, which trigger the instability. The role of such fluctuations in a plastically deformed material has been discussed in ref. 22.
is a function of plastic strain and it takes negative values at a critical state of plastic deformation. Also, a strong dynamic excitation may trigger unstable microstructural evolution. We paraphrase the argument by Prigogine21 and state that the instability results from the interplay of three aspects which are always linked in a dissipative material: there is the mechanism of inelastic flow, there are the microstructural reconfigurations and there are the flow fluctuations, which trigger the instability. The role of such fluctuations in a plastically deformed material has been discussed in ref. 22.
Power-law viscoplasticity
In our approach, the rate of the microscopic plastic strain is expressed in terms of the current stress. We propose a power-law constitutive relation, which couples the rate of the micro-plastic equivalent strain with the equivalent stress

Strength  is a temperature sensitive quantity and, therefore, the actual strength is
is a temperature sensitive quantity and, therefore, the actual strength is  , while the athermal strength
, while the athermal strength  is a material constant. We correct the power-law rate relation in (14) and introduce a rate-sensitive factor
is a material constant. We correct the power-law rate relation in (14) and introduce a rate-sensitive factor  , where
, where  , the parameter
, the parameter  is the reference rate and
is the reference rate and  is the rate of total strain. The term
is the rate of total strain. The term  describes the contribution of diffusional flow, where the parameter
describes the contribution of diffusional flow, where the parameter  is a constant and is in the order of
is a constant and is in the order of  . The function AD has already been derived (Eqn. 1) and the exponent ωp is a constant slightly smaller from one. At high temperatures and/or very low strain rates, the term
. The function AD has already been derived (Eqn. 1) and the exponent ωp is a constant slightly smaller from one. At high temperatures and/or very low strain rates, the term  affects the flow process defined in (14). At the initial stage of plastic deformation, the rate of elastic strain dominates
affects the flow process defined in (14). At the initial stage of plastic deformation, the rate of elastic strain dominates  and, therefore, we have
and, therefore, we have  . When the rate of plastic strain controls the deformation process
. When the rate of plastic strain controls the deformation process  , the strain rate sensitivity is
, the strain rate sensitivity is  . Consequently, the material experiences a smooth strain rate transition from
. Consequently, the material experiences a smooth strain rate transition from  to a nearly strain rate insensitive plastic flow
to a nearly strain rate insensitive plastic flow  . In this construction, the model captures diffusional flow, power-law creep and plasticity. It is worth mentioning that similar power-law expressions have already been used for metals23,24 and frictional materials25. Elastic material properties complete the constitutive description. We use the rule of the strain rate additivity
. In this construction, the model captures diffusional flow, power-law creep and plasticity. It is worth mentioning that similar power-law expressions have already been used for metals23,24 and frictional materials25. Elastic material properties complete the constitutive description. We use the rule of the strain rate additivity  and, then, the rate of stress is
and, then, the rate of stress is  , where the fourth order elastic tensor is C.
, where the fourth order elastic tensor is C.
Discussion
Model validation
We have four groups of independently verifiable parameters. First group constitutes elastic properties  . The second describes the thermally activated processes
. The second describes the thermally activated processes  . The average Schmid factor is defined in terms of two parameters
. The average Schmid factor is defined in terms of two parameters  and, then, the rate of slip reconfigurations is controlled by the parameter
and, then, the rate of slip reconfigurations is controlled by the parameter  . Lastly, the power-law flow rules are determined in terms of four parameters
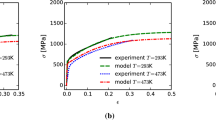
. Lastly, the power-law flow rules are determined in terms of four parameters  . The thermally activated processes are calibrated against experimental data, where yield stress is plotted as a function of temperature. The average Schmid factor controls the rate of plastic hardening and the rate of the energy storage. The flow rules determine the stress-strain rate sensitivity. We calibrate the model for stainless steel 304L and the parameters are listed in the Table 1. The model is coded and figures are constructed using the Wolfram software Mathematica. First, we compare the predicted and experimentally obtained stress-strain responses at strain rate 0.66/s and room temperature, Fig. 2. Red dots in the plot represent the experimental data. We also show the material’s sensitivity to strain rates ranging from 6.610−5/s to 66.0/s. On the same plot, we include the normalized yield stress plotted as a function of temperature. Yield stress is normalized with respect to yield at room temperature. Again, the dots represent published experimental data26,27,28. Both the predictions in Fig. 2 are matching the experimental data, though it is understandable that the data gathered from multiple sources exhibits some scatter. Next, we compare the experimentally measured rate of the energy storage and compare it with our predictions
. The thermally activated processes are calibrated against experimental data, where yield stress is plotted as a function of temperature. The average Schmid factor controls the rate of plastic hardening and the rate of the energy storage. The flow rules determine the stress-strain rate sensitivity. We calibrate the model for stainless steel 304L and the parameters are listed in the Table 1. The model is coded and figures are constructed using the Wolfram software Mathematica. First, we compare the predicted and experimentally obtained stress-strain responses at strain rate 0.66/s and room temperature, Fig. 2. Red dots in the plot represent the experimental data. We also show the material’s sensitivity to strain rates ranging from 6.610−5/s to 66.0/s. On the same plot, we include the normalized yield stress plotted as a function of temperature. Yield stress is normalized with respect to yield at room temperature. Again, the dots represent published experimental data26,27,28. Both the predictions in Fig. 2 are matching the experimental data, though it is understandable that the data gathered from multiple sources exhibits some scatter. Next, we compare the experimentally measured rate of the energy storage and compare it with our predictions  , Fig. 3. The scatter of measurements results from the heat fluctuations, which occur both in time and space. Such fluctuations are caused by stochasticity of the dislocation multiplication, motion and storage. Similar responses are obtained for 2024-T3 aluminum alloy and α-titanium; both of the materials are subjected to quasi-static and dynamic loading29. In all the cases29,30,31, the rate of storage decreases as the material is plastically deformed. Our model correctly predicts the slowdown of the storage. As we indicated earlier, the formation of shear bands should reverse the trends. The power-law viscoplasticity captures the behaviors from diffusional flow, power-law creep up to the plastic flow. We demonstrate these deformation mechanisms by constructing the Frost-Ashby deformation map32, Fig. 4. Our map captures the main features of the behavior within a broad range of strain rates and temperatures.
, Fig. 3. The scatter of measurements results from the heat fluctuations, which occur both in time and space. Such fluctuations are caused by stochasticity of the dislocation multiplication, motion and storage. Similar responses are obtained for 2024-T3 aluminum alloy and α-titanium; both of the materials are subjected to quasi-static and dynamic loading29. In all the cases29,30,31, the rate of storage decreases as the material is plastically deformed. Our model correctly predicts the slowdown of the storage. As we indicated earlier, the formation of shear bands should reverse the trends. The power-law viscoplasticity captures the behaviors from diffusional flow, power-law creep up to the plastic flow. We demonstrate these deformation mechanisms by constructing the Frost-Ashby deformation map32, Fig. 4. Our map captures the main features of the behavior within a broad range of strain rates and temperatures.

Uniaxial stress versus strain in tension is plotted for four different strain rates and at room temperature.
Red dots represent experimental data. The embedded plot shows yield stress constructed in terms of temperature. The prediction is compared with experimental data gathered from refs 26, 27, 28.

The rate of energy storage is plotted as a function of plastic strain.
Red dots represent our experimental data obtained from the simultaneous measurements of infrared and visible cameras.

The mechanisms-based model is used for the prediction of the Frost-Ashby deformation map for stainless steel 304L (ref. 32, p. 66).
The chemical composition of the steel is presented in Table 2. Solid lines represent the material responses at constant strain rate plotted as a function of the normalized shear stress and homologous temperature.
Our motivation has been to capture the relevant micro-mechanisms of plastic flow, while retaining the simplicity of the phenomenological material description. In this manner, we bridge the phenomenology with the relevant mechanisms of plastic deformation. We do not identify independent crystallographic orientations and, instead, apply weight to each  orientation. Thus, in our approach slip occurs along a broad spectrum of planes and, then, the plastic flow is projected onto the plane of maximum shear stress. The slip reconfigurations are detectable in our measurements of the energy storage rate. We have shown that these reconfigurations are stable in a homogeneously deformed material. However, the processes may become unstable in the presence of localized shear bands. The latter are triggered by strong spatial and temporal stress fluctuations discussed in ref. 22. We complete the approach by introducing the description for the thermally activated motion of dislocations, where two characteristic temperatures are introduced. The transition temperature Tc differentiates the behavior between the power-law creep mechanism and the low-rate sensitive dislocation glide. The melting temperature Tm is introduced for a proper description of diffusional flow. Also, we propose a generalized model for the power-law flow, where we capture the inelastic behaviors associated with diffusional flow, power-law creep and plasticity. We validate the approach by developing a constitutive model for stainless steel 304L. The material’s chemical composition is designed for impeding the deformation-induced martensitic transformation.
orientation. Thus, in our approach slip occurs along a broad spectrum of planes and, then, the plastic flow is projected onto the plane of maximum shear stress. The slip reconfigurations are detectable in our measurements of the energy storage rate. We have shown that these reconfigurations are stable in a homogeneously deformed material. However, the processes may become unstable in the presence of localized shear bands. The latter are triggered by strong spatial and temporal stress fluctuations discussed in ref. 22. We complete the approach by introducing the description for the thermally activated motion of dislocations, where two characteristic temperatures are introduced. The transition temperature Tc differentiates the behavior between the power-law creep mechanism and the low-rate sensitive dislocation glide. The melting temperature Tm is introduced for a proper description of diffusional flow. Also, we propose a generalized model for the power-law flow, where we capture the inelastic behaviors associated with diffusional flow, power-law creep and plasticity. We validate the approach by developing a constitutive model for stainless steel 304L. The material’s chemical composition is designed for impeding the deformation-induced martensitic transformation.
Methods
Experimental procedure
As mentioned above, a part of the plastic work is dissipated as heat and the rest of it increases internal energy. In the area of the strain localization, the distribution of the strain rates is not uniform and, therefore, a non-uniform temperature field is observed on the surface of the specimen31. Evolution of the temperature field during the deformation process is recorded by a high sensitivity IR thermography system. The average temperature of the selected section of the specimen is plotted as a function of time. Note that the section is positioned in such a manner to avoid the influence of the specimen edges on the measured temperature values. The initial volume of the section is equal to (1.3 × 1.3 × 2) mm3 and the initial cross-section is (1.3 × 2) mm2. The size of the section is changing during the tensile deformation. These changes are monitored by tracking the section’s center in the visible range by means of the CCD camera. All these data have been used to calculate heat generated during short time interval in the section. The interval is the reciprocal of the measurement frequency. The experiments are performed on austenitic stainless steel with chemical composition shown in Table 2. This composition is developed to mitigate the phase transformation during the deformation process. The strips with the cross-section 25 mm × 4 mm are initially annealed at 1,050 °C, water quenched and 50% cold rolled. Then, the specimens for tensile testing are cut to the right shape using an electro-erosion machining. Prior to testing, the specimens are annealed for 1 h at 1,100 °C and water quenched to produce a homogeneous microstructure with a mean grain size about 50 μm and are electro-polished. We use MTS 858 testing machine and apply tensile deformation with the displacement rate, which corresponds the strain rate equal to 0.66/s. In the course of the deformation process, the infrared and visible range image sequences are recorded simultaneously using the infrared Phoenix and pco. 1200 hs cameras. The measurement frequency of both cameras is equal to 538 Hz. This frequency is sufficient to avoid the contribution of heat transfer between neighboring sections. The analysis of the displacement field (based on markers tracking) and the appropriate temperature distributions is performed using MATLAB software.
Additional Information
How to cite this article: Zubelewicz, A. and Oliferuk, W. Mechanisms-based viscoplasticity: Theoretical approach and experimental validation for steel 304L. Sci. Rep. 6, 23681; doi: 10.1038/srep23681 (2016).
References
McDowell, D. L. Viscoplasticity of heterogeneous metallic materials. Mat. Sci. Eng. R 62, 67–123 (2008).
Taylor, G. & Quinney, H. The latent energy remaining in a metal after cold working. Proc R. Soc. Lond. 143, 307–326 (1934).
Wolfenden, A. The ratio of stored to expended energy during the deformation of copper and aluminium single crystals at 78 K. Acta Metall. 16, 975–980 (1968).
Chrysochoos, A. & Maisonneuve, O. Energy balance for elastic plastic deformation at finite strain. C.R. Acad. Sci. 300, 985–990 (1985).
Oliferuk, W., Świątnicki, W. & Grabski, M. W. Rate of energy storage and microstructure evolution during the tensile deformation of austenitic steel. Mater. Sci. Eng. A 161, 55–63 (1993).
Hodowany, J., Ravichandran, G., Rosakis, A. J. & Rosakis, P. Partition of plastic work into heat and stored energy in metals. Exp. Mech. 40, 113–123 (2000).
Oliferuk, W. & Maj, M. Stress–strain curve and stored energy during uniaxial deformation of polycrystals. Eur. J. Mech. A/Solids 28, 266–272 (2009).
Rönnpagel, D. & Schwink, C. H. Measurement of the stored energy of copper single crystals by means of a new deformation calorimetry method. Acta Metall. 26, 319–331 (1978).
Oliferuk, W., Gadaj, S. P. & Grabski, M. W. Energy storage during the tensile deformation of Armco iron and austenitic steel. Mater. Sci. Eng. 70, 131–141 (1984).
Rittel, D. On the conversion of plastic work to heat during high strain rate deformation of glassy polymers. Mech. Mater. 31, 131–139 (1999).
Rosakis, P., Rosakis, A. J., Ravichandran, G. & Hodowany, J. A thermodynamic internal variable model for the partition of plastic work into heat and stored energy in metals. J. Mech. Phys. Solids 48, 581–607 (2000).
Bever, M. B., Holt, D. L. & Titchener, A. L. The stored energy of cold work. Prog. Mater. Sci. 17, 23–58, Pergamon Press (1973).
Asaro, J. R. Crystal Plasticity. J. Appl. Mech. 50, 921–934 (1983).
Nemat-Nasser, S. & Okinaka, T. A new approach to crystal plasticity: fcc single crystal, Mech. Mat. 25, 43–57 (1996).
Anand, L. & Kothari, M. A computational procedure for rate-independent crystal plasticity. J. Mech. Phys. Solids 44, 525–558 (1996).
Ryu, S., Kang, K. & Cai, W. Entropic effect on the rate of dislocation nucleation. PNAS 108, 5174‐5178 (2011).
Zubelewicz, A. Micromechanical study of ductile polycrystalline materials. J. Mech. Phys. Solids 41, 1711–1722 (1993).
Borbely, A., Maurice Piot, D. & Driver, J. H. Spatial characterization of the orientation distribution in a stable plane strain-compressed Cu crystal: A statistical analysis. Acta Mat. 55, 487–496 (2007).
Di Gioacchino, F. & Quinta da Fonseca, J. An experimental study of the polycrystalline plasticity of austenitic steel. Int. J. Plast. 74, 92–109 (2015).
Pantheon, W. Distribution in dislocation structures: Formation and spatial correlation. J. Meter. Res. 17, 2433–2441 (2002).
Prigogine, I. Time, structure and fluctuations. Nobel Lecture Dec. 8, 1997.
Zubelewicz, A. Metal behavior at extreme loading rate: Thermodynamics. Phys. Rev. B 77, 214111 (2008).
Zubelewicz, A., Zurek, A. K. & Potocki, M. L. Dynamic behavior of copper under extreme loading rates. J. Phys. IV 138, 23–27 (2006).
Zubelewicz, A., Addessio, F. & Cady C. Constitutive Model for Uranium-Niobium Alloy. J. Appl. Phys. 100, 013523 (2006).
Zubelewicz, A. et al. Dynamic behavior and fracture of materials. Int. J. Rock Mech. and Mining Sci. 72, 277–282 (2014).
Towfighi, S., Romilly, D. P. & Olson, J. A. Elevated temperature material characteristics of AISI 304L stainless steel. Mat. High Temp. 30, 151–156 (2013).
Blandford, R. K., Morton, D. K., Snow, S. D. & Rahl, T. E. Tensile stress-strain results for 304L and 316L stainless steel plate at temperature. Proc. ASME 2007 Pressure Vessels and Piping Conf. 6, 617–628, San Antonio, TX, July 22-26 (2007).
Weon Kim, J. & Sang Byun, T. Analysis of tensile deformation and failure in austenitic stainless steels: Part I–Temperature dependence. J. Nucl. Mat. 396 (1–9) (2010).
Hodowany, J., Ravichandran, G., Rosakis, A. J. & Rosakis, P. Partition of plastic work into heat and stored energy in metals, Exp. Mech. 40, 113–123 (2000).
Oliferuk, W., Maj, M. & Raniecki, B. Experimental analysis of energy storage rate components during tensile deformation of polycrystals. Mat. Sci. Eng. A, 374, 77–81 (2004).
Oliferuk, W., Maj, M. & Zembrzycki, K. Determination of the energy storage rate distribution in the area of strain localization using infrared and visible imaging. Exp. Mech. 55, 753–760 (2015).
Frost, H. & Ashby, M. F. Deformation-mechanism maps: The plasticity and creep of metals and ceramics. Pergamon Press, Oxford (1982).
Acknowledgements
The authors wish to thank Dr. Z. Mroz of the Institute of Fundamental Technological Research for reading the manuscript and sharing his comments and suggestions. The study has been supported by Alek and Research Associates, LLC and Civil Engineering Department at the University of New Mexico.
Author information
Authors and Affiliations
Contributions
A.Z. developed the mechanisms-based concept and constructed constitutive model for steel 304L. W.O. provided experimental data suitable for calibration of the model. All authors reviewed the manuscript.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Zubelewicz, A., Oliferuk, W. Mechanisms-based viscoplasticity: Theoretical approach and experimental validation for steel 304L. Sci Rep 6, 23681 (2016). https://doi.org/10.1038/srep23681
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep23681
- Springer Nature Limited
This article is cited by
-
Procedure to implement shear evolution in fast rolling models with online capability on the example of an aluminum flat rolling process
Archive of Applied Mechanics (2022)
-
Metal behavior in the extremes of dynamics
Scientific Reports (2018)
-
Precursors of Dynamic Excitations and Rupture in Rocks
Rock Mechanics and Rock Engineering (2017)