
Abstract
Meeting the power demand from the transmission system operator is an important objective for power dispatch, which introduces a power supply-demand equality constraint coupling all the wind turbines among the wind farm into the optimization problem. For a large-scale wind farm, processing the global equality constraint in a centralized or distributed framework is time-consuming and computationally complex. Here we considered the fast and localized execution issue of the power optimal dispatch problems. A completely decentralized dynamic system was designed to optimize power flow while satisfying the electricity supply constraints. A voltage optimization problem with the global power constraints was decoupled into local wind turbine controllers based on the node-dependence nature, which is an inherent characteristic of wind farms and was fitted to the power sensitivity matrix in this paper. The local optimization problem was solved iteratively using the gradient projection method, and the system converged linearly to the equilibrium point. The simulations for the case studies performed in Simulink demonstrate that the proposed method achieves a near-global optimal performance using only local measurements.
Similar content being viewed by others


Introduction
Wind power has recently emerged as one of the most popular renewable energy sources. Wind power has recently emerged as one of the most popular renewable energy sources. However, as the capacity and scale of wind farms (WFs) increase, the power dispatch problem in large-scale WFs is computationally complex and time-consuming, leading to the fact that conventional control methods may not perform well in real-time applications1. Therefore, further research should focus on improving the operational performance of the WF power control methods, including optimality, computational cost, and response speed2.
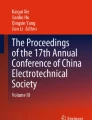
Power dispatch in WFs is a source allocation problem that requires the consideration of multiple objectives, such as node voltage security3, grid commands4, and so on. Among them, voltage control is the main challenge of WF operation. The fluctuating wind power (active power) injection poses a risk of overvoltage at the wind turbine (WT) terminal3. Extensive studies have been conducted to address this problem3,4,5,6. For example, a proportion distribution control method was proposed to maintain the voltage stability of the point of common coupling1. In this classical control method, a WF controller calculates the total reactive power required by the point of common coupling, proportionally distributed to each WT. A model predictive control (MPC)-based active and reactive power management method was established to suppress voltage deviations and power losses in WFs3,4. Furthermore, MPC and droop control were combined to establish an optimal voltage control method5, and a sensitivity-based coherence analysis method has been proposed for voltage control in WFs6. However, as shown in Fig. 1a, these centralized methods require a central controller to collect and store global information and formulate and send control strategies to all local agents. Large-scale WFs may not perform well because of the computational complexity. Longer computation times and poorer robustness have been demonstrated in large-scale WFs7. In addition, the centralized control strategies suffer from high data storage and communication requirements1,5. In a practical scenario, in February 2022 in Europe, more than 6000 WTs lost remote control due to satellite communication failures.

a Centralized framework and its computing task allocation. b Distributed framework and its computing task allocation. The computational tasks are assigned to sub-controllers and local wind turbine (WT) controllers in a hierarchical manner. And there is data sharing between these sub-controllers. c Decentralized framework and its computational task allocation. The computing tasks are directly assigned to the local WT controllers, and there is no communication between these controllers. d The drawbacks of the decentralized methods described in (c). Incomplete information may cause loss of optimality or even instability. \({P}_{i}\) and \({Q}_{i}\) are the active and reactive power measurements at the \({i}^{{{\rm{th}}}}\) WT.
Distributed methods have been proposed in the last decade to address the limitations of conventional centralized methods8,9. In this way, the total computational task is assigned to several sub-controllers, and these sub-controllers are each responsible for a collection of WTs. As shown in Fig. 1b, the WF cooperative control can be realized through data sharing between sub-controllers. For example, an active and reactive power control method based on the alternating direction method of multipliers was proposed to reduce the communication and computational burden of the systems10,11. Furthermore, a multisource cooperative control method was proposed for the optimal control of modern power systems12. However, the control performance of these methods is limited by communication failures (e.g., time delays12 and packet losses13) and asynchronous implementations14.
In recent years, to further reduce the communication pressure, decentralized control techniques have been proposed and applied in many fields15,16. As shown in Fig. 1c, decentralized methods typically eliminate communication links and information sharing, and instead prefer to recognize the global state from local measurements17,18. For WF power control, decentralized control has emerged as a promising solution for source allocation problems in complex systems owing to its stability and optimality19,20. Droop control is a classical decentralized control method used in WFs without pursuing specific optimality21. At present, these control methods without optimization can no longer meet WF operational requirements22. A local optimal Var/Volt control method with fast convergence was also proposed23. Recent studies employed online control based on the gradient projection (GP) method to achieve decentralized optimal Var/Volt control24. The control performance of this method has also been demonstrated in asynchronous applications25. However, in most cases, decentralized control will still result in a partial loss of optimization performance. This is because globally coupled constraints are usually difficult to handle in the existing decentralized optimization control methods26. However, they are inevitably introduced in some practical operational scenarios4,27,28. For example, responding to grid power commands is a key objective of power dispatch in WFs and involves introducing a coupled power supply-demand equation constraint to the optimization problem. As shown in Fig. 1c, although the optimization problem can be easily solved in a centralized or distributed framework, handling the coupled power constraint is challenging in a decentralized system with incomplete information because of a lack of external prompts29.
To improve the practicality of the decentralized optimal control, this paper considers the localized execution issue of the coupled power constraints. The premise for achieving this goal is that even in the case of communication isolation, there are still potential opportunities to achieve coordinated control between WTs due to consistency objectives and electrical connections. Due to the physical connection through the power feeder, power (voltage) variations of the local WTs will cause voltage (power) fluctuations at other nodes9. A power flow relationship exists in the WF, as shown in Eq. (1).
with
where \(\Delta {{\bf{U}}}\) and \(\Delta {{\boldsymbol{\theta }}}\) are the increments of voltage magnitude and phase angle, respectively. \(\Delta {{\bf{P}}}\) and \(\Delta {{\bf{Q}}}\) are power increments. \(\left[\frac{\partial U}{\partial P}\right],\left[\frac{\partial U}{\partial Q}\right],\left[\frac{\partial \theta }{\partial P}\right],\left[\frac{\partial \theta }{\partial Q}\right]\) are the voltage sensitivity matrices, which depend on the connection relations and impedance characteristics between the nodes in the network4. It can be found that each node voltage is a function involving the injected power of all WTs among the WF, which characterizes the inherent coupling between WTs.
On the other hand, with the deployment of global optimization-based controllers and algorithms in WFs in recent years, the low-level WT controllers have been required to produce electricity in a somewhat collaborative and consistent manner to achieve a specific overall optimal performance, which has further strengthened the degree of physical and informational interconnection among the local WTs1. For example, in the voltage control systems, the WTs located at the root nodes could appropriately reduce the voltage reference to ensure the voltage security of WTs located at the leaf nodes6. Additionally, for power production, the front WTs could curtail the captured wind energy to boost the rotor speed of the rear WTs10. Thus, the WF is a node-dependent network in which the physical connection and the consistent strategy simultaneously determine its interdependence properties (i.e., the directed graphs and the amplitude of the acting force).
Extensive literature illustrates the interconnection relationship between distributed generators as the basis for achieving cooperative optimization30,31,32. This study aims to establish an explicit expression to describe the internal node-dependence nature and utilize it to address the localized execution issue of the coupled power constraints in a completely decentralized framework.
Results
Initial centralized optimization problem
As mentioned earlier, node dependence is related to the consistent optimization objectives. In this section, a WF power optimal dispatch problem is formulated to meet the practical operational requirements. For the WFs with larger scale and more complex coupling characteristics located on the generation source side, the voltage control problem is crucial for stable operation. The node voltage of the WF is sensitive and vulnerable to random wind energy because of long transmission lines and a small X/R ratio. Another practical operational issue is that the total active/reactive power output of the WF needs to track the commands of the transmission system operator. \({P}_{{{\rm{wf}}}}^{{{\rm{req}}}}\) and \({Q}_{{{\rm{wf}}}}^{{{\rm{req}}}}\) represent the total active/reactive power commands, which are usually set according to the voltage at the point of connection of the WF and the power balance of the regional grid33,34. However, they do not necessarily satisfy the need for voltage control at the internal nodes of the WF35. The conventional methods of average or proportional distribution may lead to overvoltage or even WT power outages36. Therefore, this study aims to achieve an optimal power dispatch in the source-side large-scale WFs to ensure node voltage security while tracking and responding to power commands from the transmission system operator.
with
where \({P}_{i}\left(k\right)\) and \({Q}_{i}\left(k\right)\) are the active and reactive power output of the WTs. \({P}_{0,i}\) and \({Q}_{0,i}\) are the active and reactive power output at current time \({t}_{0}\). \({P}_{i}\left(k\right)={P}_{0,i}+\Delta {P}_{i}\left(k\right)\) and \({Q}_{i}\left(k\right)={Q}_{0,i}+\Delta {Q}_{i}\left(k\right)\), where \(\Delta {P}_{i}\) and \(\Delta {Q}_{i}\) are the active and reactive power increments of the \({i}^{{{\rm{th}}}}\) WT. Eq. (2b) is the power flow constraint of the WF system, which describes the correlation between the node voltage and the injected power. \({{{\bf{S}}}}_{P}^{V}=\left[\frac{\partial U}{\partial P}\right]\in {{\mathbb{R}}}^{{N}_{{{\rm{w}}}}\times {N}_{{{\rm{w}}}}}\) and \({{{\bf{S}}}}_{Q}^{V}=\left[\frac{\partial U}{\partial Q}\right]\in {{\mathbb{R}}}^{{N}_{{{\rm{w}}}}\times {N}_{{{\rm{w}}}}}\) denote the sensitivities of the active and reactive power, respectively, to node voltage amplitude, which is an intrinsic property of the WF that depends on the system topology knowledge (the detailed calculations are shown in the “Methods” section). Eqs. (2c) and (2d) are the power tracking constraints, where \({\sum }_{i=1}^{{N}_{{{\rm{w}}}}}{P}_{i}={P}_{{{\rm{wf}}}}\) and \({\sum }_{i=1}^{{N}_{{{\rm{w}}}}}{Q}_{i}={Q}_{{{\rm{wf}}}}\). Eqs. (2e) and (2f) are the capacity constraints of active and reactive power with \({\bar{P}}_{i}\) being proportional to the third power of wind speed. The values of \({\underline{Q}}_{i}\) and \({\bar{Q}}_{i}\) can be calculated using the following formulas37:
where \({S}_{{{\rm{g}}}}\) denotes the capacity of the WT generator. Eqs. (2c) and (2d) are global equations coupling the power information of all WTs among the WF, which leads to the fact that the original optimization problem cannot be decomposed to be executed in the local controllers. When the total power demands \({P}_{{{\rm{wf}}}}^{{{\rm{req}}}}\) and \({Q}_{{{\rm{wf}}}}^{{{\rm{req}}}}\) are predetermined by the day-ahead planning, the main challenge is to calculate the total power increments \({{{\boldsymbol{\Delta }}}P}_{{{\rm{wf}}}}={\sum }_{i=1}^{{N}_{{{\rm{w}}}}}{{{\boldsymbol{\Delta }}}P}_{i}\) and \({{{\boldsymbol{\Delta }}}Q}_{{{\rm{wf}}}}={\sum }_{i=1}^{{N}_{{{\rm{w}}}}}{{{\boldsymbol{\Delta }}}Q}_{i}\), locally. To overcome this difficulty, node-dependence matrices are introduced to examine the mapping relationship between local variables and the global objective function.
Construction of the power sensitivity matrices
The analysis of node-dependence nature reveals the potential interaction among local WTs. As shown in Fig. 2a, due to the consistent objectives and electrical connections, power collaboration exists between WTs even if they do not share any information. Specifically, in pursuit of the convergence of the optimization problem and system stability, other WTs tend to compensate for the impact of the local WT’s power output on the voltage/power balance state (global optimization objective). This implicit characteristic provides the possibility of local prediction and decoupled control, and we formulate an explicit model called power sensitivity in this paper to fit this potential internal dependence. We propose the power sensitivity model to estimate the real-time power trajectory of the WF using only local information. For the \({i}^{{th}}\) WT,
where \(\Delta {\hat{P}}_{{{\rm{wf}}},{{i}}}\left(k\right)\) and \(\Delta {\hat{Q}}_{{{\rm{wf}}},{{i}}}\left(k\right)\) represent the increments of the total active and reactive power of the WF estimated at the \({i}^{{{\rm{th}}}}\) local controller at the sampling moment \(k\). \({{\boldsymbol{E}}}{\,{=}\,}{N}_{{{\rm{w}}}}\times {\left[1\right]}_{{N}_{{{\rm{w}}}}\times 1}\) represents the vector with the element \({N}_{{{\rm{w}}}}\). \({{{\bf{S}}}}_{{P}_{i}}^{{P}_{{{\rm{wf}}}}}\), \({{{\bf{S}}}}_{{Q}_{i}}^{{P}_{{{\rm{wf}}}}}\), \({{{\bf{S}}}}_{{Q}_{i}}^{{Q}_{{{\rm{wf}}}}}\), and \({{{\bf{S}}}}_{{P}_{i}}^{{Q}_{{{\rm{wf}}}}}\) represent the \({i}^{{{\rm{th}}}}\) row of the power sensitivity matrices \({{{\bf{S}}}}_{P}^{{P}_{{{\rm{wf}}}}}\), \({{{\bf{S}}}}_{Q}^{{P}_{{{\rm{wf}}}}}\), \({{{\bf{S}}}}_{Q}^{{Q}_{{{\rm{wf}}}}}\), and \({{{\bf{S}}}}_{P}^{{Q}_{{{\rm{wf}}}}}\), respectively.

a The node-dependence nature expressed in the power response: the consistency objective indicates that all wind turbines (WTs) in the whole wind farm (WF) have the same control objective, and these control algorithms may be deployed in the energy management system as well as in the WT controller. The electrical connection is related to the network layout and line parameters. b Construction rule of the power sensitivity matrices. The ‘paths’ describe the effect of each WT’s behavior on the power output of the other WTs, which is related to the control schemes. c Control rules of the proposed decentralized method. The external power information can be estimated locally based on the power response principle in (b), and thus the original centralized optimization problem can be reconstructed in local controllers. \({P}_{i}\) and \({Q}_{i}\) are the active and reactive power measurements at the \({i}^{{{\rm{th}}}}\) WT. \({\hat{P}}_{i}(k)\) and \({\hat{Q}}_{i}(k)\) are the estimated active and reactive power in the \({i}^{{{\rm{th}}}}\) local controller at time k. \({S}_{{P}_{i}}^{{P}_{j}}\), \({S}_{{Q}_{i}}^{{P}_{j}}\), \({S}_{{Q}_{i}}^{{Q}_{j}}\), and \({S}_{{P}_{i}}^{{Q}_{j}}\) are the power sensitivity parameters proposed in this paper.
Furthermore, based on (4), \({P}_{{{\rm{wf}}}0}\) and \({Q}_{{{\rm{wf}}}0}\) can be calculated cumulatively at the local controller,
where \({P}_{{{\rm{wf}}}}^{{{\rm{ini}}}}\) and \({Q}_{{{\rm{wf}}}}^{{{\rm{ini}}}}\) represent the initial power states, and \({\hat{P}}_{{{\rm{wf}}},i}\) and \({\hat{Q}}_{{{\rm{wf}}},i}\) represent the total active and reactive power of the WF estimated for the \({i}^{{{\rm{th}}}}\) local controller.
Based on (4) and (5), we can rewrite the original optimization objective can be expressed in a local form by calculating the power sensitivity.
The matrix \({{{\bf{S}}}}_{P}^{{P}_{{{\rm{wf}}}}}\) describes the effects of the active power output of the local WTs on active power of other WTs, with entries being:
where \(\{{S}_{{P}_{i}}^{{P}_{j}}=\frac{\partial {{{\rm{P}}}}_{{{\rm{G}}},j}}{\partial {{{\rm{P}}}}_{{{\rm{G}}},i}}\in {\mathbb{R}}|\,i,j=1,2,\ldots ,{N}_{{{\rm{w}}}}\,\}\) represents the sensitivity of the active power of the \({i}^{{{\rm{th}}}}\) WT to the active power of the \({j}^{{{\rm{th}}}}\) WT and can be used to analyze the active power sensitivity calculation method.
According to Eq. (2), the proposed control system has three control objectives: suppressing voltage deviation, tracking active power demand, and tracking reactive power demand. \({P}_{j}\) is simultaneously affected by all three control objectives/paths due to internal dependence. Figure 2b1 demonstrates the construction rule of \({S}_{{P}_{i}}^{{P}_{j}}\).
In Path 1, the \({j}^{{{\rm{th}}}}\) WT is required to compensate for the node voltage deviation caused by the active power output of the \({i}^{{{\rm{th}}}}\) WT. This can be fitted using the following expression:
where \({{{\bf{S}}}}_{{P}_{j}}^{V}\) represents the \({i}^{{{\rm{th}}}}\) column of the active power–voltage sensitivity matrix \({{{\bf{S}}}}_{P}^{V}\). \({{{\bf{S}}}}_{V}^{{P}_{j}}\) can be obtained by inverting the elements of \({{{\bf{S}}}}_{{P}_{j}}^{V}\).
Path 2 involves modifying the active power supply-demand relationship by increasing the active power of the \({i}^{{{\rm{th}}}}\) WT, consequently impacting the active power output of the \({j}^{{{\rm{th}}}}\) WT. This relationship can be fitted using the following expression:
where \({k}_{1}\) is a positive constant. \(\mu\) denotes the direction factor defined as follows and can help prevent mutual inhibition between WTs:
In Path 3, the incremental active power of the \({i}^{{{\rm{th}}}}\) WT results in a change in the reactive power output. This change in the reactive power supply-demand relationship affects the reactive power output of the \({j}^{{{\rm{th}}}}\) WT, followed by a change in the active power output. This relationship can be expressed as follows:
where \({S}_{{Q}_{j}}^{{P}_{j}}\) represents the \({j}^{{{\rm{th}}}}\) diagonal element of \({{{\bf{S}}}}_{Q}^{P}\). \({k}_{2}\) is a positive constant. \(\tau\) denotes a direction factor defined as follows:
In summary, the uniform expression for \({S}_{{P}_{i}}^{{P}_{j}}\) can be written as
where \({w}_{V,{jj}}\) represents the \({j}^{{{\rm{th}}}}\) diagonal element of the weight matrix of the voltage control \({{{\bf{w}}}}_{V}\). \({w}_{P}\) and \({w}_{Q}\) denote the weight coefficients of the active and reactive power supply-demand control.
\({{{\bf{S}}}}_{Q}^{{P}_{{{\rm{wf}}}}}\) accounts for the effects of the reactive power of the local WTs on the total active power of the WF:
where \(\{{S}_{{Q}_{i}}^{{P}_{j}}\in {\mathbb{R}}|\,i,j=1,2,\ldots ,{N}_{{{\rm{w}}}}\,\}\) represents the sensitivity of the reactive power of the \({i}^{{{\rm{th}}}}\) WT to the active power of the \({j}^{{{\rm{th}}}}\) WT. Figure 2b2 illustrates the construction rule.
Since the impact of the power tracking control has already been taken into account in \({S}_{{P}_{i}}^{{P}_{j}}\), only one influence path involving the voltage control objective is included in \({S}_{{Q}_{i}}^{{P}_{j}}\).
Similar to Eq. (7), \({S}_{{Q}_{i}}^{{P}_{j}}\) can be expressed as follows:
where \({{{\bf{S}}}}_{{Q}_{i}}^{V}\) is the \({i}^{{{\rm{th}}}}\) column of the reactive power–voltage sensitivity matrix \({{{\bf{S}}}}_{Q}^{V}\).
\({{{\bf{S}}}}_{Q}^{{Q}_{{{\rm{wf}}}}}\) describes the effects of the reactive power output of the local WTs on the reactive power of other WTs, with entries being:
where \(\big\{{S}_{{Q}_{i}}^{{Q}_{j}}{\mathbb{\in }}{\mathbb{R}}i,j={1,2},\ldots ,{N}_{{{\rm{w}}}}\big\}\) represents the sensitivity of the reactive power of the \({i}^{{{\rm{th}}}}\) WT to the reactive power of the \({j}^{{{\rm{th}}}}\) WT, and its construction rule is similar to that of \({S}_{{P}_{i}}^{{P}_{j}}\), as illustrated in Fig. 2b3.
According to the construction rule, a unified expression can be obtained as follows:
where \({{{\bf{S}}}}_{V}^{{Q}_{j}}\) can be obtained by inverting the elements of \({{{\bf{S}}}}_{{Q}_{j}}^{V}\). \({S}_{{P}_{j}}^{{Q}_{j}}\) represents the \({j}^{{{\rm{th}}}}\) diagonal element of \({{{\bf{S}}}}_{P}^{Q}\). \({k}_{3}\) and \({k}_{4}\) are two positive constants.
\({{{\bf{S}}}}_{P}^{{Q}_{{{\rm{wf}}}}}\) accounts for the effects of the active power output of the local WTs on the total reactive power of the WF:
The construction rule of \(\{{S}_{{P}_{i}}^{{Q}_{j}}\in {\mathbb{R}}|\,i,j=1,2,\ldots ,{N}_{{{\rm{w}}}}\}\) is illustrated in Fig. 2b4, and the corresponding uniform expression is as follows:
The last two terms of Eqs. (12) and (16) can be corrected dynamically. Therefore, these power sensitivity parameters are not static but can be adaptively updated according to the current operating state.
Decentralized power optimal control
So far, the node dependence of the WF can be explicitly expressed as power sensitivity. As shown in Fig. 2c, once the initial power flow state is known, the power sensitivity can be used to characterize the impact of local power changes on the output state of other WTs, thus using only local measurements to predict the power trajectory of the whole WF at each subsequent moment. The original centralized optimization problem can be reconstructed at the local controllers by replacing hard-to-access global information with local estimates. Eq. (2) can be rewritten in the following subproblem form (\(i={1,2}\ldots {N}_{{{\rm{w}}}}\))
To facilitate the solution, we incorporate the relatively complex constraints Eqs. (19c) and (19d) into the cost function based on the Lagrangian relaxation method. Assuming that the voltage reference takes the rated voltage (1.0 p.u.) and that the initial voltage measurement coincides with the rated voltage, then Eq. (19) can be rewritten as:
s. t. (19e) and (19f), \(i={1,2}\ldots {N}_{{{\rm{w}}}}\)
Up to this point, the original optimization problem has been transformed into a subproblem with only simple constraints. The GP method is a generalization of the conventional gradient descent method and is an effective means of dealing with the problems with constraints. Extensive studies have proved that the GP method is suitable for solving optimization problems of the form Eq. (20)24,26. In addition, with the iterative update method, online feedback and continuous correction can ensure that this dynamic system always runs along the optimization path. According to the principle of the GP method, the sequence of active and reactive power outputs can be iteratively updated until the optimal problem solution (20) is achieved.
where \(\alpha\) and \(\gamma\) are the step size coefficients; \(\frac{\partial {F}_{i}}{\partial {P}_{i}}\) and \(\frac{\partial {F}_{i}}{\partial {Q}_{i}}\) are the partial derivatives of the objective function \({F}_{i}\) with respect to the active and reactive power, respectively, and can be calculated as follows:
here \({\left(\cdot \right)}^{+}\) represents the projection operation to project a polynomial into a feasible domain. For the box constraint problem in this study, we obtained
and the feasible domains of active and reactive power output are mentioned in Eqs. (19e) and (19f).
An iterative update-based decentralized dynamic control system for optimal power dispatch is presented in Eq. (21). As shown in Fig. 2c, the continuous power iterative updates lead the local observer to approximate the real operating state, thus realizing the optimal power allocation under the global power constraints. This method enables implicit multi-turbine collaboration without the physical communication facilities. Supplementary Fig. 1 shows the flowchart of the proposed method. The main steps of this power optimal dispatch method can be described as follows:
-
1.
Input initial information.
-
2.
Formulate a centralized power optimal dispatch problem for voltage control and power tracking.
-
3.
Analyze the node dependence, including calculating voltage sensitivity and power sensitivity, estimating the power response of other WTs using local measurements, and replacing the global information in the power matrix.
-
4.
Decompose the initial problem to the local controllers.
-
5.
Solve the optimization problem using the GP method.
Simulation part
Figure 3 displays the typical configuration of a radial WF comprising 16 × 5 MW WTs connected to a medium voltage collector bus through four feeders. The WF is connected to an external grid through a 33/155 kV transformer with a rated capacity of 120 MVA. A completely decentralized control framework was executed in this WF, where optimal power dispatch did not require any mutual information sharing. The system parameters are listed in Supplementary Table 1. Additionally, the WTs on each feeder were operated with different wind speeds to respond to the actual operating state, considering the geographical location and wake effects. Supplementary Fig. 2 displays the wind speed curves in the WF.

The test WF consists of 16 × 5 MW wind turbines (WTs) which are connected to a medium voltage bus via four power cables. The power is transmitted to the external grid after passing through a 33/155 kV booster station. This test network is performed in a decentralized control framework, in which there is no communication between these local WTs. Although there is no physical data sharing, there are still potential interconnections between these local controllers, resulting in an implicit node-dependence graph.
Optimized power dispatch
Figure 4 illustrates the total active and reactive power output profiles of the WF. The active power supply-demand curve was divided into three periods, as shown in Fig. 4a, i.e., constant control (t = 0–100 s), load shedding control (t = 100–250 s), and maximum power point tracking (MPPT) control (t = 250–500 s). The reactive power demand curve was also divided into three periods according to power commands, as shown in Fig. 4b. It can be found from Fig. 4 that the proposed decentralized dynamic control system can respond to the grid power demand with small errors only through local measurements, even under time-varying operating conditions.

a Active power. \({P}_{{{\rm{wf}}}}^{{{\rm{req}}}}\) is the total active power command. \({P}_{{{\rm{wf}}}}^{{{\rm{total}}}}\) is the total active power output. According to the instructions of the dispatch center, the active power output is divided into constant control period, load shedding control period, and maximum power point tracking (MPPT) period. b Reactive power. \({Q}_{{{\rm{wf}}}}^{{{\rm{req}}}}\) is the total reactive power command. \({Q}_{{{\rm{wf}}}}^{{{\rm{total}}}}\) is the total reactive power output.
Figure 5 illustrates the total active and reactive power output estimated by each local WT among the WF. Initially, all WTs had the same estimated power output due to the common starting point of the iteration, but they gradually became different. The individualized estimated power profiles indicated that each WT identified the system state differentially, caused by the communication isolation in the decentralized control framework. However, the proposed decentralized control system can address this issue by designing a trajectory for each local WT based on node dependence to achieve global optimization. Thus, the differentiation in the estimated power profiles can be accepted and utilized for decentralized applications.

a Active power profiles of all wind turbines (WTs). b Reactive power profiles of all WTs.
We selected two cross-section conditions, A: t = 110 s and B: t = 400 s, to demonstrate the dynamic characteristics of the proposed system. The power sensitivity matrices at these sampling moments are presented as a heat map in Fig. 6. The power sensitivity is updated in real time according to the power states, and the matrices exhibit feeder characteristics. The power correlation characteristics within a cluster (multiple WTs connected to the same substation) are similar, even among several WTs on a single feeder. This is due to shorter electrical distances and similar operating conditions, which guide the equivalent modeling of distributed generators.

Power sensitivity matrices of the proposed decentralized system under two cross-section conditions (i.e., A: t = 110 s and B: t = 400 s) presented in the form of a heat map. a Active power sensitivity \({{{\bf{S}}}}_{P}^{{P}_{{{\rm{wf}}}}}\) at time A. b Active power sensitivity \({{{\bf{S}}}}_{Q}^{{P}_{{{\rm{wf}}}}}\) at time A. c Reactive power sensitivity \({{{\bf{S}}}}_{Q}^{{Q}_{{{\rm{wf}}}}}\) at time A. d Reactive power sensitivity \({{{\bf{S}}}}_{P}^{{Q}_{{{\rm{wf}}}}}\) at time A. e Active power sensitivity \({{{\bf{S}}}}_{P}^{{P}_{{{\rm{wf}}}}}\) at time B. f Active power sensitivity \({{{\bf{S}}}}_{Q}^{{P}_{{{\rm{wf}}}}}\) at time B. g Reactive power sensitivity \({{{\bf{S}}}}_{Q}^{{Q}_{{{\rm{wf}}}}}\) at time B. h Reactive power sensitivity \({{{\bf{S}}}}_{P}^{{Q}_{{{\rm{wf}}}}}\) at time B.
In addition to power supply-demand constraints, minimizing node voltage deviation is a crucial control objective for safe operation. Figure 7 presents the node voltage profiles for all WTs, with the highest voltage at approximately 1.023 p.u. and the lowest voltage at 0.995 p.u. The proposed decentralized dynamic control system can control node voltages within feasible ranges through only local measurements.

The measurement nodes are located at the WT output terminals. The base voltage is 0.69 kV.
Comparison test
The proposed method was compared with two previously reported control methods, namely the centralized model predictive control (CMPC) method4 and the droop-based Var/Volt control method. MPC is a widely used control method. In MPC, the control input is obtained by solving a discrete-time optimal control problem over a given horizon. In this paper, the MPC method has the same control objectives (i.e., voltage control and power tracking) as the proposed method, with the difference that it can accept and process complete network information in a centralized manner. Moreover, the droop-based Var/Volt control method is a classical local control technique that uses the following equation21
where α is the step size coefficient.
Figure 8 displays the key node voltage profiles and power output of the WF with the three methods. Droop control can regulate the node voltage around the rated value, but the profiles exhibit a large jitter. Besides, in droop control, the WTs are completely independent of each other, so the global control objective is difficult to achieve. In Fig. 8a, the total active and reactive power output of the WF cannot respond to power commands. In the CMPC method, a central controller formulates an optimized generation plan based on global information to achieve global optimal control performance while responding to active/reactive power demand. However, the centralized method may not perform well in larger systems due to computational complexity and time consumption4. Through the proposed control method, near-global optimal active and reactive power dispatch can be achieved with satisfactory voltage control performance.

From left to right, the root node voltage, end node voltage, active power tracking and reactive power tracking. \({V}_{{{\rm{wt}}}1}\) is the terminal voltage of the wind turbine (WT) located at the root node. \({V}_{{{\rm{wt}}}\_{{\rm{end}}}}\) is the terminal voltage of the end WT. The base voltage is 0.69 kV. \({P}_{{{\rm{wf}}}}^{{{\rm{total}}}}\) is the total active power output. \({P}_{{{\rm{wf}}}}^{{{\rm{req}}}}\) is the total active power command. \({P}_{{{\rm{wf}}}}^{{{\rm{total}}}}\) is the total active power output. \({Q}_{{{\rm{wf}}}}^{{{\rm{req}}}}\) is the total reactive power command. \({Q}_{{{\rm{wf}}}}^{{{\rm{total}}}}\) is the total reactive power output. a The control performance of the droop method. b The control performance of the centralized model predictive control method. c The control performance of the proposed method.
Moreover, the proposed method does not require any external communication and centralized computation, leading to short computation times and high response rates. And its calculation time will not skyrocket with the increase of WF scale. To validate it, we tested the proposed method and the conventional methods on a network of 32, 64, 128, 256, and 400 WTs using a personal computer (Intel Core 654 i7-11700KF, 32 GB RAM). Table 1 shows the computation time and control performance of these methods. It can be found that compared to the CMPC, the droop control is computation-cheap, but it does not have power-tracking capability. With the CMPC, the average voltage deviation can be reduced to 0.0194 p.u. And the active/reactive power output can accurately track commands. However, the method suffers from heavy centralized computation and intensive communication, which leads to a computation time of 416.298 s in a WF of 400 WTs. Since centralized computation and intensive data sharing are avoided, the proposed method achieves a trade-off between computational burden and optimized performance. And its computation time does not skyrocket with the increase of the WF size. The computation time of the proposed method is shorter than the CMPC by 0.274 s, 3.83 s, 26.5 s, 109.2 s, and 416.0 s for the WF of 32, 64, 128, 256, and 400 WTs, respectively. Moreover, the global power tracking constraints can be implemented due to the local estimation of the WF power response. In Table 1, although the error of the proposed decentralized method is slightly larger than that of the centralized method, that is still satisfactory. Overall, the proposed method can achieve similar optimization performance as the centralized control method, while greatly improving the computational efficiency and response speed.
To investigate the effect of constrained communication on the power control performance, a communication fault is set at WT8 (the end of the second feeder) at 40 s. Figure 9 shows the comparison of the control performance between the CMPC method and the proposed method. In the centralized control mode, the WF central controller cannot receive the operational information of WT8 and also WT8 cannot receive the power reference from the central controller. As a result, the terminal voltage of the WT8 rises above 1.35 p.u. as shown in Fig. 9a. Moreover, as shown in Fig. 9b, c, the active/reactive power tracking performance of the whole WF becomes worse even if there is only one communication fault at WT8. With the proposed decentralized method, WT8 only needs local measurements and not global information. Therefore, as shown in Fig. 9, when a communication fault occurs, there is no fluctuation in the terminal voltage using the proposed method, and the power tracking function of the WF is not disturbed.

a Terminal voltage of WT8, and the base voltage is 0.69 kV. b Active power tracking. c Reactive power tracking. The blue dashed line, the red solid line and the black dotted line represent the centralized model predictive control (CMPC), the proposed control method and the power demand from the dispatch center, respectively.
Conclusions
This paper presented a decentralized dynamic system for power optimal dispatch in WFs, designed to suppress voltage deviations while tracking and responding to power demand from the transmission system operator. The power supply-demand introduces an equality constraint that couples all WTs into the optimization problem, which results in computational complexity and time consumption under a conventional centralized control framework. To achieve decentralized control at a faster response speed, the node-dependence nature of the WF was analyzed and modeled as the power sensitivity. This power sensitivity described the effect of local WT action on the global power trend. Based on this mechanism, hard-to-access external information can be estimated using local measurements, and thus the original optimization problem was decomposed into a sum of the local optimization problems. Case studies in MATLAB/Simulink demonstrated that the proposed method can achieve minimal power tracking errors and regulate node voltages within a feasible range. Moreover, the computation time of the controller was greatly reduced compared with the conventional centralized control.
Methods
Convergence analysis
The convergence performance of the proposed optimization algorithm is analyzed in this section. A sufficient stability condition is to ensure that the error of this system is shrinking in each iteration38,39, which leads to the following proposition.
Proposition 1: If \({C}_{2}\) holds, the system Eq. (21) linearly converges to the equilibrium point \({{{{\boldsymbol{z}}}}_{i}}^{* }\in {{\mathbb{R}}}^{2}\) with a convergence rate of β.
where \({{\boldsymbol{I}}}=[1,0;0,1]\). \({{\bf{M}}}\) represents the coefficient matrix related to the iterative update. \(\beta =1-\alpha +\alpha \parallel {{\boldsymbol{I}}}-\gamma {{\bf{M}}}\parallel\) represents convergence rate.
Proof: Assume that \({{{{\bf{z}}}}_{i}}^{* }={[{P}_{i}^{* },{Q}_{i}^{* }]}^{{{\rm{T}}}}\) is the equilibrium point of the optimization problem, the convergence condition is equivalent to making the iteration error of the proposed method converge to zero, i.e., \(\parallel \! {{{\bf{z}}}}_{i}(k)-{{{{\bf{z}}}}_{i}}^{* }\!\parallel \to 0,\,t\to \infty\). We can obtain
Because of the non-expansive property of the projection operation23, the above equation can be rewritten as follows:
Substituting \(\nabla {F}_{i}({{{\bf{z}}}}_{i}(k))={\left[\frac{\partial {F}_{i}}{\partial {P}_{i}(k)},\frac{\partial {F}_{i}}{\partial {Q}_{i}(k)}\right]}^{{{\rm{T}}}}\),
where \({{\bf{M}}} = \left[\begin{array}{cc}{{{\rm{m}}}}_{11} & {{{\rm{m}}}}_{12}\\ {{{\rm{m}}}}_{21} & {{{\rm{m}}}}_{22}\end{array}\right]\) is a coefficient matrix with the following entries:
From (28), the sufficient condition for convergence is \(\parallel {{\boldsymbol{I}}} - \gamma \, {{\bf{M}}} \parallel < 1\), which can be achieved by selecting suitable control parameters, i.e., \(\exists \gamma \in {\mathbb{R}}\), and \(\exists \{{k}_{n}\in {\mathbb{R}}|\,n=1,\,2,\,3,\,4\}\) (The proof was omitted). The linear convergence property can be expressed as follows:
where \(\beta\) denotes the convergence rate and \(\beta =1-\alpha +\alpha \parallel {{\boldsymbol{I}}}-\gamma {{\bf{M}}} \parallel\). It can be found that the proposition coincides with the classical dynamic system stability conditions on the eigenvalues of the Jacobi matrix40,41.
Voltage sensitivity calculation
The voltage/power model of a WF can be defined in the following incremental form,
where \(\Delta {{\bf{U}}}\) and \(\Delta {{\boldsymbol{\theta }}}\) are the increments of voltage and phase angle, respectively, \(\Delta {{\bf{P}}}\) and \(\Delta {{\bf{Q}}}\) are the increments of active and reactive power, respectively, and \([\frac{\partial U}{\partial P}],\,[\frac{\partial U}{\partial Q}],\,[\frac{\partial \theta }{\partial P}],\,[\frac{\partial \theta }{\partial Q}]\) denote the sensitivity coefficients.
The exact calculation of sensitivity coefficients suffers from complexity. To improve the computational performance, an offline sensitivity calculation method for WFs with fixed topologies was developed42. The relationship between voltage and power injection can be given by,
where \({{{\mathscr{N}}}}_{{{\rm{w}}}}\) is the set of power injection buses (i.e., WT nodes), \({\underline{S}}_{i}\) is the conjugate of \({\bar{S}}_{i}={P}_{i} + {{\rm{j}}}{Q}_{i}\) for \(i\in {{{\mathscr{N}}}}_{{{\rm{w}}}}\), \({\underline{U}}_{i}\) is the conjugate of \({\bar{U}}_{i} {\Delta} q {U}_{i}{e}^{j{\theta }_{i}}\) for \(i\in {{{\mathscr{N}}}}_{{{\rm{w}}}}\), \({P}_{l}\) and \({Q}_{l}\) are the active and reactive power of the \({\{l|l\in {{{\mathscr{N}}}}_{{{\rm{w}}}}\}}^{{{\rm{th}}}}\) WT, respectively, and \({\bar{Y}}_{{{\rm{bus}}}}=[{\bar{Y}}_{{{\rm{bus}}},ij}]\) denotes the admittance matrix.
\(\frac{\partial {\underline{U}}_{i}}{\partial {P}_{l}},\,\frac{\partial {\bar{U}}_{j}}{\partial {P}_{l}},\,\frac{\partial {\underline{U}}_{i}}{\partial {Q}_{l}},\) and \(\frac{\partial {\bar{U}}_{j}}{\partial {Q}_{l}}\) can be obtained by solving (31) and (32). Thus, sensitivity coefficients can be calculated as
Once the network topology and system parameters are determined, the voltage sensitivity matrices \({{{\bf{S}}}}_{P}^{V}={[\frac{\partial U}{\partial P}]}_{{N}_{{{\rm{w}}}}\times {N}_{{{\rm{w}}}}}\) and \({{{\bf{S}}}}_{Q}^{V}={[\frac{\partial U}{\partial Q}]}_{{N}_{{{\rm{w}}}}\times {N}_{{{\rm{w}}}}}\) of the WF can be computed based on (33) and (34).
Data availability
The source data underlying Fig. 4a, b are available at Figshare: https://figshare.com/articles/dataset/Source_data_fig_4_a_b/2602877243. The additional data that support the findings of this study are available from the corresponding author upon reasonable request.
Code availability
Code for this article is available from the corresponding author upon reasonable request.
References
Sun, H. et al. Review of challenges and research opportunities for voltage control in smart grids. IEEE Trans. Power Syst. 34, 2790–2801 (2019).
Jing, H., Wang, Y. & Li, Y. Data-driven quantum approximate optimization algorithm for power systems. Commun. Eng. 2, 12 (2023).
Zhao, H. et al. Coordinated voltage control of a wind farm based on model predictive control. IEEE Trans. Sustain. Energy 7, 1440–1451 (2016).
Guo, Y. et al. Enhanced voltage control of VSC-HVDC-connected offshore wind farms based on model predictive control. IEEE Trans. Sustain. Energy 9, 474–487 (2018).
Huang, S. et al. Adaptive droop-based hierarchical optimal voltage control scheme for VSC-HVdc connected offshore wind farm. IEEE Trans. Ind. Inform. 17, 8165–8176 (2021).
Liu, J.-H. & Cheng, J.-S. Online voltage security enhancement using voltage sensitivity-based coherent reactive power control in multi-area wind power generation systems. IEEE Trans. Power Syst. 36, 2729–2732 (2021).
Wei, J. et al. Hierarchical event-triggered MPC-based coordinated control for HVRT and voltage restoration of large-scale wind farm. IEEE Trans. Sustain. Energy 13, 1819–1829 (2022).
Vovos, P. N., Kiprakis, A. E., Wallace, A. R. & Harrison, G. P. Centralized and distributed voltage control: impact on distributed generation penetration. IEEE Trans. Power Syst. 22, 476–483 (2007).
Antoniadou-Plytaria, K. E., Kouveliotis-Lysikatos, I. N., Georgilakis, P. S. & Hatziargyriou, N. D. Distributed and decentralized voltage control of smart distribution networks: models, methods, and future research. IEEE Trans. Smart Grid 8, 2999–3008 (2017).
Huang, S., Wu, Q., Guo, Y. & Rong, F. Hierarchical active power control of DFIG-based wind farm with distributed energy storage systems based on ADMM. IEEE Trans. Sustain. Energy 11, 1528–1538 (2020).
Huang, S. et al. Distributed voltage control based on ADMM for large-scale wind farm cluster connected to VSC-HVDC. IEEE Trans. Sustain. Energy 11, 584–594 (2020).
Xu, D. et al. Distributed multi-energy operation of coupled electricity, heating, and natural gas networks. IEEE Trans. Sustain. Energy 11, 2457–2469 (2020).
Inaolaji, A., Savasci, A., Paudyal, S. & Kamalasadan, S. Distributed optimal power flow in unbalanced distribution grids with non-ideal communication. IEEE Trans. Ind. Appl. 59, 5385–5397 (2023).
Liu, H. J., Shi, W. & Zhu, H. Distributed voltage control in distribution networks: online and robust implementations. IEEE Trans. Smart Grid 9, 6106–6117 (2018).
He, X. et al. Nature of power electronics and integration of power conversion with communication for talkative power. Nat. Commun. 11, 2479 (2020).
Kou, P., Liang, D., Gao, R., Liu, Y. & Gao, L. Decentralized model predictive control of hybrid distribution transformers for voltage regulation in active distribution networks. IEEE Trans. Sustain. Energy 11, 2189–2200 (2020).
He, X. et al. Wireless power and information dual transfer system via magnetically coupled resonators. Commun. Eng. 3, 8 (2024).
Peng, H. et al. A gradient correction-based decentralized optimal Var/Volt adaptive fault-tolerant control method for wind farms. IEEE Trans. Sustain. Energy 13, 2264–2274 (2022).
Asadollah, S., Zhu, R. & Liserre, M. Analysis of voltage control strategies for wind farms. IEEE Trans. Sustain. Energy 11, 1002–1012 (2020).
Mohammadi, A., Mehrtash, M. & Kargarian, A. Diagonal quadratic approximation for decentralized collaborative TSO+DSO optimal power flow. IEEE Trans. Smart Grid 10, 2358–2370 (2019).
Martínez, J., Kjær, P. C., Rodriguez, P. & Teodorescu, R. Design and analysis of a slope voltage control for a DFIG wind power plant. IEEE Trans. Energy Convers. 27, 11–20 (2012).
Karthikeya, B. R. & Schütt, R. J. Overview of wind park control strategies. IEEE Trans. Sustain. Energy 5, 416–422 (2014).
Zhu, H. & Liu, H. J. Fast local voltage control under limited reactive power: optimality and stability analysis. IEEE Trans. Power Syst. 31, 3794–3803 (2016).
Jiao, W. et al. Distributed coordinated voltage control for distribution networks with DG and OLTC based on MPC and gradient projection. IEEE Trans. Power Syst. 37, 680–690 (2022).
Guo, Y., Gao, H., Wang, D. & Wu, Q. Online optimal feedback voltage control of wind farms: decentralized and asynchronous implementations. IEEE Trans. Sustain. Energy 12, 1489–1492 (2021).
Peng, H. et al. Decentralized Volt/Var control based on variable gradient projection for PMSG-based wind farm. IEEE Trans. Sustain. Energy 13, 1305–1314 (2022).
Lee, J.-O., Kim, Y.-S., Kim, E.-S. & Moon, S.-I. Generation adjustment method based on bus-dependent participation factor. IEEE Trans. Power Syst. 33, 1959–1969 (2018).
Yang, Y. et al. Decentralized EV-based charging optimization with building integrated wind energy. IEEE Trans. Netw. Sci. Eng. 16, 1002–1017 (2019).
Wang, X. et al. Network system for nonsmooth coupled-constrained optimization. IEEE Trans. Netw. Sci. Eng. 9, 3691–3700 (2022).
Dong, X. et al. Power transfer limit calculation method for multi-area interconnection power networks. IEEE Trans. Power Syst. 36, 4723–4732 (2021).
Li, Q. & Zhao, N. General power flow calculation for multi-terminal HVDC system based on sensitivity analysis and extended AC grid. IEEE Trans. Sustain. Energy 13, 1886–1899 (2022).
Dong, X. et al. Power flow analysis considering automatic generation control for multi-area interconnection power networks. IEEE Trans. Ind. Appl. 53, 5200–5208 (2017).
MansourLakouraj, M., Majid, S., Shafie-khah, M. & Catalão, J. P. S. Optimal market-based operation of microgrid with the integration of wind turbines, energy storage system and demand response resources. Energy 239, 122156 (2022).
Jiao, P. H. et al. Joint active and reactive for allocation of renewable energy and energy storage under uncertain coupling. Appl. Energy 302, 117582 (2021).
Ding, T. et al. Two-level coordinated static voltage security region for centrally integrated wind farms. IEEE Trans. Smart Grid 7, 460–470 (2016).
Zhao, H. et al. Combined active and reactive power control of wind farms based on model predictive control. IEEE Trans. Energy Convers. 32, 1177–1187 (2017).
Han, T. et al. Reactive power coordinated control strategy for offshore wind farm cluster with VSC-HVDC transmission. In Proc. IEEE 2nd International Conference on Electronics Technology (ICET), 185–189 (IEEE, 2019).
Guo, Y. & Gao, H. Data-driven online system equivalent for self-adaptive droop voltage control of wind power plants. IEEE Trans. Energy Convers. 35, 302–305 (2020).
M. Farivar, L. Chen & S. Low. Equilibrium and dynamics of local voltage control in distribution systems. In Proc. IEEE Conference on Decision and Control, 4329–4334 (IEEE, 2013).
Jahangiri, P. & Aliprantis, D. C. Distributed Volt/Var control by PV inverters. IEEE Trans. Power Syst. 28, 3429–3439 (2013).
Robbins, B. A., Hadjicostis, C. N. & Domínguez-García, A. D. A two-stage distributed architecture for voltage control in power distribution systems. IEEE Trans. Power Syst. 28, 1470–1482 (2013).
Christakou, K., LeBoudec, J.-Y., Paolone, M. & Tomozei, D.-C. Efficient computation of sensitivity coefficients of node voltages and line currents in unbalanced radial electrical distribution networks. IEEE Trans. Smart Grid 4, 741–750 (2013).
Peng, H. Source_data_fig_4_a_b. figshare https://doi.org/10.6084/m9.figshare.26028772.v1 (2024).
Acknowledgements
This research is supported by the National Key Research and Development Program of China (2022YFF0608700), the National Natural Science Foundation of China (52277047), and the National Natural Science Foundation of China (52207050).
Author information
Authors and Affiliations
Contributions
Sheng Huang conceived the idea and designed the research study. Hanzhi Peng performed the simulation analysis, experimental design and paper writing. Xiaohui Huang conducted the mathematical derivation and code writing. Juan Wei and Qiuwei Wu offered ideas on the integration method, experimental prototype, and paper writing. Chao Wei, Wei Zhang and Yinpeng Qu collected/organized the simulation data and wrote the paper/revision.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Engineering thanks Linquan Bai and the other anonymous reviewer(s) for their contribution to the peer review of this work. Primary handling editors: Mengying Su and Anastasiia Vasylchenkova. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Huang, S., Peng, H., Huang, X. et al. Decentralized dynamic system for optimal power dispatch in wind farms based on node-dependence nature. Commun Eng 3, 112 (2024). https://doi.org/10.1038/s44172-024-00258-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s44172-024-00258-5
- Springer Nature Limited