
Abstract
In their natural environment, animals face a variety of ecological and social challenges, which might be linked to the emergence of different cognitive skills. To assess inter-specific variation in cognitive skills, we used ungulates as a study model, testing a total of 26 captive individuals across 5 different species (i.e., dwarf goats, Capra aegagrus hircus, llamas, Lama glama, guanacos, Lama guanicoe, zebras, Equus grevyi, and rhinos, Diceros bicornis michaeli). Across species, we used the same well-established experimental procedures to test individuals’ performance in naïve physics tasks, i.e. object permanence, short-term spatial memory, causality, understanding of object properties, and gravity. Our results revealed that study subjects showed object permanence, were able to remember the position of hidden food after up to 60 s, and inferred the position of hidden food from the sound produced or not produced when shaking containers. Moreover, they showed an understanding of basic object properties, being able to locate objects hidden behind occluders based on their size and inclination, and could reliably follow the trajectory of falling objects across different conditions. Finally, inter-specific differences were limited to the understanding of object properties, and suggest that domesticated species as goats might perform better than non-domesticated ones in tasks requiring these skills. These results provide new information on the cognitive skills of a still understudied taxon and confirm ungulates as a promising taxon for the comparative study of cognitive evolution.
Similar content being viewed by others


Introduction
In their natural environment, animals face a variety of ecological and social challenges. Theories of cognitive evolution suggest that these challenges have favoured the emergence of cognitive skills that allow individuals to better cope with the problems they encounter in their ecological niches1,2. One of the most basic cognitive skills is object permanence, which is the ability to know that objects continuously exist through space and time, even when they are hidden3. In humans, object permanence develops through six main stages: in the first three stages (i.e., stage 1: development of reflexes, stage 2: development of habits, stage 3: development of coordination between vision and prehension), infants show no object permanence3. Before approaching the first year of age, however, they understand objects as separate entities existing even when they are not visible (stage 4) and can locate objects after visible (stage 5) and invisible displacements (stage 6)3,4,5,6. Object permanence is also widespread in species other than humans7, for example, it has been shown in primates8,9,10,11,12,13,14,15,16, birds17,18,19,20,21,22,23,24, dogs (Canis familiaris;25,26,27), cats (Felis catus;27,28), goats (C. a. hircus;29,30,31), sheep (Ovis orientalis aries;31,32), giraffes (Giraffa carmelopardalis;33) and dolphins (Tursiops truncatus;34), just to name a few.
Another crucial cognitive skill is the ability to recall the position of objects or other animals after different delays of time. Short-term spatial memory, for instance, is very common in different taxa7, and has been reported in primates8,12,35, birds36,37,38, dogs25,39, cats25,27,39, goats29, sheep40, giraffes33 and horses (Equus caballus;41) among others. Studies in ungulates, a less studied taxon in this regard, have shown that giraffes can successfully recall the position of hidden food after delays of up to 30 s33, whereas horses can store information about hidden food for at least 20 s41.
Causal understanding, defined as the understanding that one event is the consequence of another, might also be important to deal with socio-ecological challenges42. Causal understanding, for instance, might facilitate the retrieval of embedded food (e.g. trap tube task:43,44; e.g., tool-use in crows:45) and allow individuals to better predict where and when food will be available46. From 3 years of age, human children are able to solve causality tasks in which they are presented with two opaque containers, only one being baited, and they receive either acoustic or visual cues about the location of the reward, by for instance shaking either the baited or the non-baited container47. Species other than humans can also use acoustic cues to infer the location of food, including primates48, corvids (Garrulus glandarious;49), pigs (Sus scrofa domestica), and wild boars (Sus scrofa scrofa;50). Pigs and wild boars, for instance, were able to locate food in one out of two containers, if the baited one provided an acoustic cue when being shaken. However, when the empty container was shaken, they failed to infer that the food was in the other container50. When using visual cues (i.e., lifting the baited or the non-baited container), also goats and sheep showed an understanding of causal relationships31.
The ability to understand object properties is also crucial for several species. In humans, infants from 5 months of age understand object properties like solidity, and at 9 months they preferentially search for objects where a protuberance marks a hidden object under a cloth lying flat on a table, suggesting that these skills may be part of our innate core knowledge5,6,51,52,53,54,55,56,57,but see58. Moreover, when seeing one object disappear behind one out of two occluders of different size and/or shape, children from 3.5 months of age preferentially search for the object behind the occluder having the proper size and/or shape to hide the object57. These skills might be very useful also for species other than humans. By understanding which objects can visually occlude others, for instance, animals might make predictions about where predators might be hiding22,59,60. Newborn domestic chicks (Gallus gallus), indeed, can successfully locate an object behind the only occluder compatible with the object’s shape, and they do it without any previous experience with objects, suggesting that these skills might be part of their innate core knowledge22. However, experience might also be important to acquire a better understanding of object properties, as has been shown in horses61 and pigs50.
Finally, animals can also rely on other object properties, like gravity, to effectively solve socio-ecological challenges. Humans, for instance, show the first evidence of gravity understanding from 7 months of age, looking longer at a test event with inappropriate acceleration where a ball moved up-/downward while speeding up/slowing down62,63,64,65. However, also other species can use gravity as a cue to locate food in different experimental contexts. Several species, for instance, can successfully locate falling objects, including great apes (Gorilla gorilla, Pongo pygmaeus, Pan troglodytes, Pan paniscus;66), cotton-top tamarins (Saguinus oedipus oedipus;67), and dogs68. However, when the trajectory of the falling object gets redirected (e.g. by letting objects fall through crossed tubes), children show a gravity bias until around 3 years of age, failing to account for the presence of the tubes and still searching below the releasing point66,69. This gravity bias is present in several other species, including cotton-top tamarins70, macaques (Macaca mulatta, Macaca arctoides71), and dogs68, whereas great apes can successfully locate food falling through crossed tubes66.
Although these naïve physical cognitive skills (i.e. object permanence, short-term spatial memory, causality, understanding of object properties, and understanding of gravity) are likely crucial to face a variety of socio-ecological challenges, it is currently unclear how these skills are distributed across species, and which factors best predict this distribution. Some of these skills, for instance, object permanence and understanding of object properties, might be part of the innate core knowledge of several taxa22, although experience might also be important to acquire a better understanding of object properties50,61. Other skills, however, might have emerged in different species as a response to the specific socio-ecological challenges faced during evolution and might be largely independent of the living conditions experienced by single individuals. Researchers have proposed different evolutionary hypotheses on the distribution of cognitive skills, which are not mutually exclusive. Here, we will focus on the three hypotheses that have been widely explored in other studies.
First, some authors have proposed that species with larger dietary breadth (i.e. consuming a higher number of dietary categories) may more likely exploit novel food sources and might have thus evolved enhanced cognitive skills to better cope with this variation72. In primates, there is indeed evidence that larger dietary breadth is linked to enhanced cognitive skills such as inhibition, but it is still unclear whether dietary breadth also has the same explanatory power in other taxa73. Second, species with high levels of fission–fusion dynamics (i.e. experiencing frequent changes in subgroup size and composition; high level meaning highly fluid with either relatively stable or flexible subgroup membership;74) might show an increase in some cognitive skills, like memory to remember the identity and social relationships of other group members that are often in other subgroups, and inferential skills to effectively deal with fragmentary information about absent group members74,75. Third, domesticated species have been selected for skills and traits that facilitate their interaction with humans and are usually considered to be more playful and explorative than their wild counterparts76,77. Therefore, domesticated species may be more interested in anthropogenic objects and more likely to explore them, and thus might have a higher chance to acquire important information on their properties during their lives29,50,78.
In this study, we aimed to assess how different cognitive skills are distributed across captive individuals belonging to different ungulate species. We selected ungulates as a study model for two main reasons. Firstly, despite being economically crucial for humans, ungulates are a still largely under-studied taxon30,79,80. Secondly, ungulate species show an impressive variety of socio-ecological characteristics81 and thus constitute an ideal model to contrast different evolutionary hypotheses on the emergence of cognitive skills. In this study, we compared the performance of dwarf goats (C. a. hircus), llamas (L. glama), guanacos (Lama guanicoe), Grevy´s zebras (E. grevyi) and rhinos (D. b. michaeli) in a series of tasks testing their naïve physics, i.e. object permanence, short-term spatial memory, causality, understanding of object properties and understanding of gravity. We used the same controlled experimental procedures for all study subjects to allow more accurate comparisons8,31,66,82.
Based on existing literature (e.g.,83,84,85,86,87,88,89,90), we predicted that all species would show object permanence (Prediction 1), as this is part of their core knowledge, but that there would be inter-specific variation in the other tasks. In particular, if dietary breadth explained the distribution of cognitive skills across taxa, we would predict that species consuming a higher number of dietary categories (i.e., goats) would perform better than the others (i.e., llamas, guanacos, Grevy´s zebras and rhinos) in the other tasks (Prediction 2a). If fission–fusion levels explained the distribution of cognitive skills, we would instead predict that species with higher levels of fission–fusion dynamics (i.e., goats, Grevyi’s zebras) would perform better than species with lower levels of fission–fusion dynamics (i.e., llamas, guanacos, rhinos), especially in tasks requiring memory and inferential skills (i.e., the short-term-spatial-memory and the causality tasks, see below; Prediction 2b). If domestication explained the distribution of cognitive skills across taxa, we would predict that domesticated species (i.e., goats, llamas) would perform better than non-domesticated species (i.e., guanacos, Grevy’s zebras, rhinos; Prediction 2c).
Methods
Ethics. Informed consent was obtained from welfare managers at the zoo of Leipzig, who controlled and approved all the procedures. All the animals participated on a completely voluntary basis and no invasive procedures were used. During the task, individuals were never water or food deprived, and motivation to participate was ensured exclusively by the use of highly preferred food belonging to their natural diets. The experiments thus provided a form of enrichment for the subjects and did not present any risks or adverse effect. The study was carried out in accordance with the national regulations of Germany and ARRIVE guidelines. The Office of the Ethics Advisory Board at the University of Leipzig confirmed that formal ethical approval was not required.
Subjects. We tested 26 subjects belonging to 5 ungulate species, including 7 dwarf goats (C. a. hircus), 3 llamas (L. glama), 5 guanacos (L. guanicoe), 8 Grevyi zebras (E. grevyi) and 3 rhinos (D. b. michaeli). For each species, we tested all individuals that were housed in the Leipzig Zoo (Germany) and that interacted with the experimenter and the setup on a voluntary basis. All subjects were housed with conspecifics in enclosures with inner and outer areas and were all individually recognizable thanks to their distinctive morphological features. For more information about the study subjects, see Table 1. All study subjects received a daily diet consisting of hay and were able to eat grass or leaves ad libitum when they were in their outside enclosures. They were also provided daily with pellets, carrots, and, for the rhinos, apples, which keepers brought to the enclosure within plastic buckets and then spread on the ground.
Experimental procedure. We conducted three different tasks, whose procedures were largely based on previous studies conducted in other species9,48,91,92,93,94. Individuals were tested in their social groups, so a trial was only started when the subject was not interacting with other group members and was observing the experimenter. During all trials, the experimenter wore sunglasses to avoid providing subjects with unconscious cues about the location of food. All trials were video-recorded and scored online, and videos were later used to assess inter-observer reliability, which was very good (object permanence k = 0.994, object properties k = 0.936, object gravity k = 1.000). To avoid learning effects, we used up to 12 trials per individual and condition.
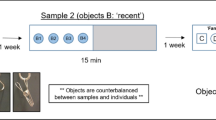
The first task aimed to assess object permanence, short-term spatial memory and causality (see Fig. 1). It consisted of a habituation phase (to habituate subjects to the set-up and procedures) and an experimental phase (which included 6 conditions, for a total of 72 experimental trials per subject). In the habituation phase, we first baited one out-of-reach opaque container in full view of the subject, after 5 s we closed it and pushed it closer to the subject. If within 30 s the subject approached the container (i.e., came with its muzzle or tongue within at least 20 cm from it), the experimenter opened it and let the subject eat the food. After four successful trials (out of five consecutive ones), we repeated this procedure, with the following exceptions: (i) we used two identical containers instead of one; (ii) only one container was baited, in full view of the subject; (iii) both containers remained open, so the subject could choose the container while the food was visible. If the subject approached the baited container within 30 s, it was allowed to eat the food; if the subject approached the empty container, the content of the other container was shown and then the food and containers were removed. After four successful trials (out of five consecutive ones), the subject proceeded to the experimental phase.

Setup for the object permanence, short-term spatial memory and causality tasks, consisting of two identical containers.
In the experimental phase, we administered all the conditions in a pseudo-randomized order, and counterbalanced the position of food across trials and conditions, without locating food more than three times on the same side. In the object permanence condition (12 trials), we tested whether individuals understood that objects continued to exist even when out of view. We used two identical opaque containers and only baited one, as in the second part of the habituation phase. The experimenter simultaneously closed the containers and pushed them closer to the subject, who could make a choice. In the short-term memory condition, we tested whether individuals could retain information about the location of food after a delay of 30 or 60 s. We used the same procedure as in the object permanence task, but before pushing the containers closer to the subject the experimenter, we waited either 30 s (12 trials) or 60 s (12 trials), while staring at the floor to provide no inadvertent cues to the subject. In the shake full condition (12 trials), we tested individuals’ understanding of causality and, in particular, whether they could use the sound produced by non-visible food to infer its position. We baited one of the two containers out of the subject’s view and shook the baited container three times (thus producing a clear rattling sound) before pushing the containers closer to the subject. No visual cue was provided to the subject as to the position of food. The shake empty condition (12 trials) was identical, except that the experimenter shook the empty container instead of the baited one. This condition allowed ruling out that successful subjects in the shake full condition were not simply selecting the shaken cup because of stimulus enhancement. Finally, we included an olfactory control condition (12 trials), to control whether individuals could rely on olfactory cues to locate non-visible food. We used the same procedure as in the object permanence condition, except that the container was baited out of the subject’s view, so that the subject had no cues other than olfactory ones to locate the food. For goats, llamas and guanacos, we used pellets, while for zebras and rhinos we used small pieces of carrots (approx. 1 × 2 cm for zebras and 3 × 3 cm for rhinos).The second task aimed to assess individuals’ understanding of object properties, and it consisted of 4 conditions, for a total of 24 experimental trials per subject (see Fig. 2). We administered all conditions in a pseudo-randomized order, and counterbalanced the position of food across trials and conditions, as above. The three panel conditions—horizontal, vertical, and flat (6 + 6 + 6 trials) tested whether individuals could infer the panel that could occlude a food reward, based on the relative shape and position of the food and the occluder. Food could only fit behind one of the two panels, even if rotated. In the panel horizontal condition (6 trials), the experimenter placed two different opaque panels (one squared 8 × 8 cm and one horizontal 4 × 16 cm) perpendicular to the ground, one on the right and one on the left side, and hid them to the subject’s view with a vertical occluder. Then the experimenter showed a piece of food to the subject, above and in the middle of the two panels, holding it with both hands. Both hands were lowered behind the occluder and simultaneously moved behind the two panels, baiting one of the two. Then the experimenter removed the occluder and pushed the panels closer to the subject, which could make a choice. In these three conditions, we used the same procedure, except that the two panels differed from each other in shape or position. We used the following pairs of panels, respectively: (i) one horizontal 4 × 16 cm panel and one 8 × 8 cm panel, both perpendicular to the ground; (ii) one vertical 16 × 4 cm panel and one 8 × 8 cm panel, both perpendicular to the ground; and (iii) one 8 × 8 cm panel, perpendicular to the ground, and one 8 × 8 cm panel, lying flat on the ground. We also added the panel control condition, where two identical opaque panels (each 8 × 8 cm) were used, to test whether the experimenter inadvertently provided cues to the subjects during the experimental procedure. We used carrots for all species, adapting their size to the panel size (sticks that were approximately 6 cm long were hidden behind 8 × 8 cm panels and those that were 12 cm long were hidden behind 16 × 4 cm or 4 × 16 cm panels).The third task aimed to assess individuals’ understanding of gravity, and it consisted of 4 conditions, for a total of 48 experimental trials per subject (see Fig. 3). Administered all conditions in a pseudo-randomized order, and counterbalanced the position of food across trials and conditions. In all conditions, the experimenter used two identical opaque containers, showed the subject that they were empty by inclining them towards the individual, and placed them on a board. In the containers condition (12 trials), we assessed whether individuals searched for a falling object in the container below the releasing point. In this condition, the experimenter covered the upper part of the containers with an occluder, simultaneously raised both hands (i.e., on top of each container), showed the content of the hands (i.e. one with food, one empty) on the tips of the fingers, and then simultaneously opened the hands to let the food fall into the container below. The experimenter removed the occluder and pushed the board closer to the subject, who could choose one container, as above. In the vertical tubes condition (12 trials), we assessed whether individuals searched for an object falling inside a tube, in the container below the releasing point. In this condition, the two containers were connected to two vertical opaque tubes. The procedure was identical to the previous condition, except that no occluder was used and the food fell inside the tubes. In the crossed tubes condition (12 trials), we assessed whether individuals showed a gravity bias, and in particular, whether they searched for a falling object below the releasing point, even in the presence of crossed tubes. The procedure was identical to the previous condition, except that we used two crossed tubes instead of two vertical ones. Finally, we included a gravity control condition (12 trials), to control whether the experimenter inadvertently provided cues to the subjects (including acoustic cues) during the experimental procedure. The procedure was identical to the container condition, except that the experimenter’s hands were maintained below and behind the occluder during the baiting procedure, thus providing no visual cue to the subject about the position of the food. For all species, we used pieces of carrots (approximately 2 × 2 cm, except for rhinos, where we used 3 × 3 cm pieces).

Setup for the object properties task, consisting of a board with attached panels, an occluder (left) and different panels (right).

Setup for the gravity task, as seen by the study animals, including the container condition (left), the vertical tubes condition (middle) and the crossed tubes condition (right).
Statistical analyses. We used the package glmmTMB95 in R (R Core Team 2020) to run three generalized linear mixed models96, one for each of the tasks we conducted (i.e. object permanence, object understanding, gravity). We prepared three different datasets, entering one line for each subject and trial (object permanence: N = 1704; object understanding: N = 1040; gravity: N = 1014). The number of data points in each dataset was not identical, because the number of trials and conditions differed across tasks (see Methods), and because few individuals stopped participating in the tasks before they were over (see Table 1). In all the models, our binomial response was whether the subject made the correct choice (i.e. choosing the baited side) or not. In all models, we included as test predictors the 2-way interaction of species and condition (to assess whether performance differed across species depending on the condition). We further included trial number (z-transformed), food position (right or left), and subject’s sex (female or male) as controls, and the subject’s identity as a random factor. We then used likelihood ratio tests (LRT) to compare each of the full models described above to a null model that was identical but excluded test predictors97. If the full model significantly differed from the null model, we used the drop1 function to assess whether the interaction included was significant, and in case it was not, we re-ran the model after removing the interaction, while keeping the main terms. In case of significant test predictors, we used the emmeans package to assess estimates for the single levels of the predictors98. We checked model assumptions with the “DHARMa” package99 and the “performance” package100. We detected no problems of convergence, overdispersion, or multicollinearity (maximum variance inflation factors across models = 2.52)101.
To assess whether subjects performed above chance (0.50) in the different conditions, we also conducted a Wilcoxon test. To this end, we prepared three further datasets, one for each of the three tasks we conducted, entering one line for each subject, with the average of correct responses in each condition (object permanence task: N = 25; object understanding task: N = 22; gravity task: N = 22). Below, we only report the p values of significant (i.e. p ≤ 0.05) tests.
Results
In Model 1, we tested whether the probability of making the correct choice in the object permanence task varied depending on the interaction of species and conditions. The full model significantly differed from the null model (GLMM: LRT χ2 = 60.68, df = 24, p < 0.001)), with condition (but not species) having a significant effect (Table 2). In particular, the probability of making the correct choice was lowest in the olfactory control condition (mean ± SD: 0.46 ± 0.03), and higher in all the other conditions (object permanence: 0.66 ± 0.03; short-term spatial memory: 0.59 ± 0.02; shake empty: 0.63 ± 0.03; shake full: 0.68 ± 0.03; see Fig. 4). In contrast, species had no significant effect (Table 2). Wilcoxon tests further showed that, except for the control condition, subjects performed above chance levels in all the other conditions (object permanence: p < 0.001; short-term spatial memory: p < 0.001; shake empty: p = 0.002; shake full: p < 0.001).

Proportion of correct choices in each condition of the object permanence task. Light grey dots represent average values for each individual goat, light grey pluses for each guanaco, dark grey triangles for each llama, dark grey crosses for each rhino, and black circles for each zebra. Thick lines represent the median of the individual values for each condition, the horizontal ends of the box represent the 25% and 75% quartiles, and the ends of the whiskers represent the 2.5% and 97.5% quartiles. The grey dotted line represents chance level.
In Model 2, we assessed whether the probability of making the correct choice in the object property task varied as a function of the interaction between species and condition. The full model differed from the null model (GLMM: LRT χ2 = 35.55, df = 19, p = 0.012). Here, both species and condition showed a significant effect on the probability of making the correct choice (Table 2). In particular, goats (0.69 ± 0.04) and llamas (0.67 ± 0.05) performed the best, followed by rhinos (0.57 ± 0.04), zebras (0.57 ± 0.03) and guanacos (0.55 ± 0.04; see Fig. 5). Moreover, the probability of making the correct choice was highest in the flat condition (0.71 ± 0.03), and lower in the others (4 × 16: 0.59 ± 0.03; 16 × 4: 0.57 ± 0.03; panel control: 0.56 ± 0.03; see Fig. 6). Wilcoxon tests showed that, except for the control condition, subjects performed above chance levels in all the other conditions (flat: p < 0.001; 4 × 16: p = 0.006; 16 × 4: p = 0.046).

Proportion of correct choices for each species in the object properties task. Light grey dots represent average values for the flat condition, light grey pluses for the 4 × 16 condition, dark grey triangles for the 16 × 4 condition, and dark grey crosses for the control condition. Thick lines represent the median of the individual values for each condition, the horizontal ends of the box represent the 25% and 75% quartiles, and the ends of the whiskers represent the 2.5% and 97.5% quartiles. The grey dotted line represents chance level.

Proportion of correct choices in each condition of the object properties task. Light grey dots represent average values for each individual goat, light grey pluses for each guanaco, dark grey triangles for each llama, dark grey crosses for each rhino, and black circles for each zebra. Thick lines represent the median of the individual values for each condition, the horizontal ends of the box represent the 25% and 75% quartiles, and the ends of the whiskers represent the 2.5% and 97.5% quartiles. The grey dotted line represents chance level.
Finally, in Model 3, we tested whether the probability of making the correct choice in the gravity task varied depending on the interaction of species and conditions. We found a significant difference between the full and the null model (GLMM: LRT χ2 = 34.37, df = 19, p = 0.017), with a significant effect of condition (Table 2). In particular, the probability of making the correct choice was lowest in the gravity control condition (0.51 ± 0.03), and higher in the other conditions (crossed tubes; 0.60 ± 0.03; vertical tubes: 0.64 ± 0.03; containers: 0.67 ± 0.03). In contrast, species had no significant effect (Table 2). Wilcoxon tests further showed that, except for the control condition, subjects performed above chance levels in all the other conditions (containers: p = 0.002; vertical tubes: p < 0.001; crossed tubes: p = 0.011).
Discussion
In this study, we aimed to assess how different naïve physical cognitive skills were distributed across captive groups of different ungulate species, with a special focus on object permanence, short-term spatial memory, causality, and understanding of object properties and gravity. We showed that study subjects were able to understand that objects continue to exist even when they are out of sight, remember the location of objects after delays of up to 60 s (short-term spatial memory), and infer the location of the food from the presence or lack of sound produced when shaking containers. Furthermore, we showed that study subjects had some understanding of object properties and gravity, being able to locate food behind one of the two occluders based on their shape and inclination, and searching for falling food in the correct location. Our study also showed little variation across species, except for the object property task, where the performance by goats and llamas was better than the one by guanacos, zebras, and rhinos. Importantly, study subjects performed at chance levels in all the control conditions, showing that they did not rely on olfactory cues or other inadvertent cues provided by the experimenter to solve these tasks.
As predicted (Prediction 1), individuals across species performed above chance in the object permanence condition (see Fig. 4), which is a widespread ability in vertebrates 7 and is thought to be part of individuals’ core knowledge5,51,54. This ability seems indeed crucial not only to locate objects (e.g., food or predators) that remain temporarily out of view but also to locate other group members that may not always be visible in the group32. In line with this, study subjects were also successful in the short-term spatial memory task, as they could remember the spatial position of a hidden object in one of the two containers after delays of up to 60 s (see Fig. 4). This is in line with other studies in ungulates, showing that horses are able to remember the position of hidden food for at least 20 s41, while giraffes can remember the correct position for up to 30 s33. In the future, it would be especially interesting to assess subjects’ performance after longer delays, as many species have exceptionally long-term memory that can span from days to months102. Large herbivores, in particular, like zebras, also rely on long-term memory skills during migrations103,104, and might have evolved specialized memory systems to store biologically relevant information for long periods102. In this study, however, we did not evidence any differences across species in their short-term spatial memory skills, in contrast to our predictions (Predictions 2a, 2b, 2c).
In the causality task, study subjects could infer the position of food, not only based on the presence of sound when shaking the baited container but also on the absence of acoustic cues when shaking the empty container (i.e., inference by exclusion; see Fig. 4). These results suggest that animals did not simply rely on stimulus enhancement to make their choice (i.e., choosing the box that was more salient because it was shaken). Our results are in line with performance in great apes48, but see105, tufted capuchin monkeys (Cebus apella;106), and grey parrots (Psittacus erithacus;107), who were also able to locate food when the experimenter shook the non-baited box. However, other species have failed to show inference by exclusion in the auditory modality, including olive baboons (Papio hamadryas anubis;108) and dogs (C. familiaris;93). The fact that ungulates might perform better than some primate species in the same task may be surprising. There are at least two possible explanations for these results. First, causal understanding might not only be important during foraging or to predict conspecifics’ behaviour in specific situations46 but also to predict the behavior of heterospecific competitors, especially predators109. Ungulates, as compared to many other species, experience an extremely high predation pressure110,111,112,113, and might as a taxon have evolved a series of cognitive skills that are especially useful to deal with this challenge. Second, although we administered very few trials to avoid learning effects during our study, it is still possible that study subjects solved the task thanks to the knowledge they had gained through experience on containers and acoustic cues, rather than due to their inference skills. In particular, although none of the study subjects received any training or test providing relevant information to solve the causality task, it is true that the zoo keepers in Leipzig may bring food to ungulates in plastic buckets, which may produce sound when keepers walk through the enclosures with full buckets, but not when the buckets are empty. Regular exposure to these feeding practices might have provided our study subjects with experience useful to successfully solve the causality task, including the harder condition implying inference by exclusion. This seems to be indeed the case, as we did not find any differences across species suggestive of evolutionary pressures linked to an increase in inference skills (in contrast to Predictions 2a, 2b, 2c). Nonetheless, even if our study subjects had learned to associate the presence/absence of food with the presence/absence of sound during their feeding routine at the zoo, it is remarkable that they promptly extended this association to the novel experimental context we used. In the future, it would be important to include other study groups that are not exposed to similar feeding practices, and further test our study subjects in other tasks requiring inference skills but using a different experimental setting.
In the object property task, study subjects were able to locate hidden objects based on the size and inclination of two different occluders, suggesting that they understood that objects occupy space and have specific dimensions (see Fig. 6). In humans, this is thought to be an innate ability belonging to our core knowledge5,51,54,55,56,58, and some authors have also suggested this for other species, as it may have crucial adaptive value (e.g., to allow predictions about where possible predators might hide22,60. In our study, this task was the only one suggesting differences between species. In particular, goats and llamas performed better than guanacos, zebras and rhinos (see Fig. 5), suggesting that, largely in line with our Prediction 2c, domesticated species might perform better than non-domesticated ones in some tasks. Through domestication, there has been a selection for skills and traits that facilitate interaction with humans and exploration, so that domesticated species might be more interested in anthropogenic objects and more likely to interact with them22,50,77,93. Therefore, although domestication might not be directly linked to the evolution of higher cognitive skills in the physical domain, as foraging challenges decreased during the domestication process, it might be linked to an increase in motivation and interest in human artifacts, which increase individuals’ chances of acquiring relevant information about object properties during their lifetime29,39,50,77. Indeed, our results are in line with other studies on ungulates, suggesting that domesticated species like horses61 and pigs50 understand basic object properties. The fact that neither dietary breadth nor fission–fusion dynamics explained performance in any of our tasks might not necessarily mean that these factors are not linked to the enhancement of specific cognitive skills. For instance, it is possible that high fission–fusion dynamics pose social challenges and are therefore only linked to an increase of certain skills in the social domain, which cannot be detected when using physical stimuli, as in our study. This explanation, however, is unlikely, as shown by other comparative studies that have found a clear link between fission–fusion dynamics and the increase of specific cognitive skills also in the physical domain35,74,114. Moreover, even though cognitive skills are likely partially modular and can independently emerge in response to specific social and ecological domains, it is likely that, once they have emerged, these skills are used to deal both with objects and social partners, as this is more effective115. Furthermore, it is interesting to note that, as for the other tasks, performance did not vary across species depending on the condition (i.e. species had an effect on performance, but not the interaction of species and condition). These results are unlikely to depend on the low power we had in our analyses: in the model for the object permanence task, for instance, the interaction between species and condition did not reach significance, but had the rhinos failed in two further trials of the shake empty condition (i.e. with a further 6% decrease in their performance in this condition), the interaction would have become significant (p = 0.037), suggesting that low power was not an issue in this study.
In the object gravity task, study subjects were able to follow the trajectory of falling objects across different conditions (see Fig. 7). Although the performance was above chance in all the conditions, there was a slight decrease in performance from the easier to the harder conditions (containers: 67% of correct choices; vertical tubes: 64%; crossed tubes: 60%), suggesting that in the crossed tubes condition subjects had difficulties overcoming their gravity bias to correctly locate the food, as also found in other species (e.g., great apes:66; dogs:68; rhesus (M. mulatta) and stump-tailed macaques71).

Proportion of correct choices in each condition of the object gravity task. Light grey dots represent average values for each individual goat, light grey pluses for each guanaco, dark grey triangles for each llama, dark grey crosses for each rhino, and black circles for each zebra. Thick lines represent the median of the individual values for each condition, the horizontal ends of the box represent the 25% and 75% quartiles, and the ends of the whiskers represent the 2.5% and 97.5% quartiles. The grey dotted line represents chance level.
Finally, it is important to note that, in this study, animals were rewarded for making a correct choice in the experimental trials. This procedure is extremely common in studies of animal cognition, as rewarding individuals for their correct choice is usually necessary not only to motivate animals to make choices in experimental set-ups, but also to test their understanding of different conditions. However, rewarding individuals for their correct choices might also lead them to master conditions through learning processes. In this study, in order to reduce the risk of learning effects and assess their impact on individuals’ performance, we took two different measures. First, we minimized individuals’ chances of learning by running a limited number of trials for each experimental condition (i.e., 12), as often done in literature. Second, we used a statistical approach that specifically allowed us to test for learning effects (i.e. for the effect of trial number) on individuals’ performance. In our case, all the models clearly showed that individuals’ performance did not increase through time, and that success in this study could not be explained by learning processes.
Overall, our study subjects performed quite well in the tasks and conditions we administered, showing a variety of cognitive skills in the physical domain. These results are in line with several studies that show evidence of different cognitive skills across ungulate species, including horses, goats, pigs, cows, and several non-domesticated species. Across species, we found relatively little variation, which might however also depend on the small sample sizes we used. In the future, it will be especially important to include more subjects and species to confirm our preliminary findings, test other hypotheses of cognitive evolution, and better understand the limits and generalizability of these hypotheses. In this regard, ungulates appear to be a highly valuable model for the study of comparative cognition, given that the large variety of socio-ecological characteristics (e.g. dietary breadth, domestication, social structure) shown by these species can allow to reliable contrast different evolutionary hypotheses and detect cases of convergent evolution.
Data availability
Data are made available at figshare, https://doi.org/10.6084/m9.figshare.25101848.
References
Holekamp, K. E. Questioning the social intelligence hypothesis. Trends Cogn. Sci. 11, 65–69 (2007).
Ashton, B. J., Thornton, A. & Ridley, A. R. An intraspecific appraisal of the social intelligence hypothesis. Philos. Trans. R. Soc. B: Biol. Sci. 373, 20170288 (2018).
Piaget, J. The Child's Construction of Reality, Philosophy, Psychiatry and Neuroscience: Three Approaches to the Mind. a Synthetic Analysis of the Varieties of Human Experience 93, (1989).
Aguiar, A. & Baillargeon, R. Perseveration and problem solving in infancy. Adv. child Develop. Behav. 27, 135–180. (1999).
Spelke, E. S., Breinlinger, K., Macomber, J. & Jacobson, K. Origins of knowledge. Psychol. Rev. 99, 605–632 (1992).
Wilcox, T., Nadel, L. & Rosser, R. Location memory in healthy preterm and full-term infants. Infant Behav. Dev. 19, 309–323 (1996).
Cacchione, T. & Rakoczy, H. APA handbook of comparative psychology: Perception, learning, and cognition Vol. 2, 579–599 (American Psychological Association, 2017).
Barth, J. & Call, J. Tracking the displacement of objects: A series of tasks with great apes (Pan troglodytes, Pan paniscus, Gorilla gorilla, and Pongo pygmaeus) and young children (Homo sapiens). J. Exp. Psychol. Anim. Behav. Process. 32, 239–252 (2006).
Call, J. Object permanence in orangutans (Pongo pygmaeus), chimpanzees (Pan troglodytes), and children (Homo sapiens). J. Comp. Psychol. 115, 159–171 (2001).
Herrmann, E., Call, J., Hernandez-Lloreda, M. V., Hare, B. & Tomasello, M. Humans have evolved specialized skills of social cognition: The cultural intelligence hypothesis. Science 317, 1360–1366 (2007).
Deblois, S. T., Novak, M. A. & Bond, M. Object permanence in orangutans (Pongo pygmaeus) and squirrel monkeys (Saimiri sciureus). Journal of Comparative Psychology 112, 137–152 (1998).
Neiworth, J. J. et al. A test of object permanence in a new-world monkey species, cotton top tamarins (Saguinus oedipus). Anim. Cognit. 6, 27–37 (2003).
Deblois, S. T. & Novak, M. A. Object permanence in Rhesus-monkeys (Macaca mulatta). J. Comp. Psychol. 108, 318–327 (1994).
Deppe, A. M., Wright, P. C. & Szelistowski, W. A. Object permanence in lemurs. Anim. Cognit. 12, 381–388 (2009).
Mallavarapu, S., Perdue, B. M., Stoinski, T. S. & Maple, T. L. Can black-and-white Ruffed Lemurs (Varecia variegata) solve object permanence tasks?. Am. J. Primatol. 75, 376–386 (2013).
Fedor, A., Skollar, G., Szerencsy, N. & Ujhelyi, M. Object permanence tests on Gibbons (Hylobatidae). J. Comp. Psychol. 122, 403–417 (2008).
Salwiczek, L. H., Emery, N. J., Schlinger, B. & Clayton, N. S. The development of caching and object permanence in Western Scrub-Jays (Aphelocoma californica): Which emerges first?. J. Comp. Psychol. 123, 295–303 (2009).
Pollok, B., Prior, H. & Gunturkun, O. Development of object permanence in food-storing magpies (Pica pica). J. Comp. Psychol. 114, 148–157 (2000).
Zucca, P., Milos, N. & Vallortigara, G. Piagetian object permanence and its development in Eurasian jays (Garrulus glandarius). Anim. Cognit. 10, 243–258 (2007).
Bird, C. D. & Emery, N. J. Rooks perceive support relations similar to six-month-old babies. Proc. Biol. Sci. 277, 147–151 (2010).
Regolin, L., Vallortigara, G. & Zanforlin, M. Object and spatial representations in detour problems by chicks. Anim. Behav. 49, 195–199 (1995).
Chiandetti, C. & Vallortigara, G. Intuitive physical reasoning about occluded objects by inexperienced chicks. Proc. Biol. Sci. 278, 2621–2627 (2011).
Auersperg, A. M. I., Szabo, B., von Bayern, A. M. P. & Bugnyar, T. Object permanence in the Goffin cockatoo (Cacatua goffini). J. Comp. Psychol. 128, 88 (2014).
Dumas, M. C. & Wilkie, D. M. Object permanence in ring doves (Streptopelia Risoria). J. Comp. Psychol. 109, 142–150 (1995).
Pattison, K. F., Miller, H. C., Rayburn-Reeves, R. & Zentall, T. R. The case of the disappearing bone: Dogs’ understanding of the physical properties of objects. Behav. Process. 85, 278–282 (2010).
Miller, H. C., Gipson, C. D., Vaughan, A., Rayburn-Reeves, R. & Zentall, T. R. Object permanence in dogs: Invisible displacement in a rotation task. Psychon. Bull. Rev. 16, 150–155 (2009).
Dore, F. Y., Fiset, S., Goulet, S., Dumas, M. C. & Gagnon, S. Search behavior in cats and dogs: Interspecific differences in working memory and spatial cognition. Anim. Learn. Behav. 24, 142–149 (1996).
Dore, F. Y. Object permanence in adult cats (Felis catus). J. Comp. Psychol. 100, 340–347 (1986).
Briefer, E. F., Haque, S., Baciadonna, L. & McElligott, A. G. Goats excel at learning and remembering a highly novel cognitive task. Front. Zool. 11, 1–12 (2014).
Nawroth, C. Halle (Saale), Universitäts-und Landesbibliothek Sachsen-Anhalt, Diss., 2015, (2015).
Nawroth, C., von Borell, E. & Langbein, J. Exclusion performance in dwarf goats (Capra aegagrus hircus) and sheep (Ovis orientalis aries). Plos One 9, e93534 (2014).
Nawroth, C., von Borell, E. & Langbein, J. Object permanence in the dwarf goat (Capra aegagrus hircus): Perseveration errors and the tracking of complex movements of hidden objects. Appl. Anim. Behav. Sci. 167, 20–26 (2015).
Caicoya, Á. L., Amici, F., Ensenyat, C. & Colell, M. Object permanence in Giraffa camelopardalis: First steps in giraffes’ physical cognition. J. Comp. Psychol. 133, 207–214 (2019).
Jaakkola, K., Guarino, E., Rodriguez, M., Erb, L. & Trone, M. What do dolphins (Tursiops truncatus) understand about hidden objects?. Anim. Cognit. 13, 103–120 (2010).
Amici, F., Aureli, F. & Call, J. Monkeys and apes: Are their cognitive skills really so different?. Am. J. Phys. Anthropol. 143, 188–197 (2010).
Pepperberg, I. M. & Funk, M. S. Object permanence in four species of psittacine birds: An African Grey parrot (Psittacus erithacus), an Illiger mini macaw (Ara maracana), a parakeet (Melopsittacus undulatus), and a cockatiel (Nymphicus hollandicus). Anim. Learn. Behav. 18, 97–108 (1990).
Kamil, A. C. & Balda, R. P. Cache recovery and spatial memory in Clark’s nutcrackers (Nucifraga columbiana). J. Exp. Psychol. Anim. Behav. Process. 11, 95 (1985).
Clayton, N. Lateralization and unilateral transfer of spatial memory in marsh tits. J. Comp. Physiol. A 171, 799–806 (1993).
Hare, B., Brown, M., Williamson, C. & Tomasello, M. The domestication of social cognition in dogs. Science 298, 1634–1636 (2002).
Edwards, G. R., Newman, J. A., Parsons, A. J. & Krebs, J. R. The use of spatial memory by grazing animals to locate food patches in spatially heterogeneous environments: An example with sheep. Appl. Anim. Behav. Sci. 50, 147–160 (1996).
Valenchon, M., Lévy, F., Fortin, M., Leterrier, C. & Lansade, L. Stress and temperament affect working memory performance for disappearing food in horses Equus caballus. Anim. Behav. 86, 1233–1240 (2013).
Bender, A. What is causal cognition?. Front. Psychol. 11, 3 (2020).
Visalberghi, E. & Limongelli, L. Lack of comprehension of cause effect relations in tool-using capuchin monkeys (Cebus apella). J. Comp. Psychol. 108, 15 (1994).
Fujita, K., Kuroshima, H. & Asai, S. How do tufted capuchin monkeys (Cebus apella) understand causality involved in tool use?. J. Exp. Psychol. Anim. Behav. Process. 29, 233 (2003).
Hunt, G. R. Manufacture and use of hook-tools by New Caledonian crows. Nature 379, 249–251 (1996).
Visalberghi, E. & Tomasello, M. Primate causal understanding in the physical and psychological domains. Behav. Process. 42, 189–203 (1998).
Hill, A., Collier-Baker, E. & Suddendorf, T. Inferential reasoning by exclusion in children (Homo sapiens). J. Comp. Psychol. 126, 243 (2012).
Call, J. Inferences about the location of food in the great apes (Pan paniscus, Pan troglodytes, Gorilla gorilla, and Pongo pygmaeus). J. Comp. Psychol. 118, 232 (2004).
Shaw, R. C., Plotnik, J. M. & Clayton, N. S. Exclusion in corvids: The performance of food-caching Eurasian jays (Garrulus glandarius). J. Comp. Psychol. 127, 428 (2013).
Albiach-Serrano, A., Bräuer, J., Cacchione, T., Zickert, N. & Amici, F. The effect of domestication and ontogeny in swine cognition (Sus scrofa scrofa and S. s. domestica). Appl. Anim. Behav. Sci. 141, 25–35 (2012).
Aguiar, A. & Baillargeon, R. Developments in young infants’ reasoning about occluded objects. Cognit. Psychol. 45, 267–336 (2002).
Baillargeon, R. Object permanence in 3 1/2-month-old and 4 1/2-month-old infants. Dev. Psychol. 23, 655–664 (1987).
Baillargeon, R., Spelke, E. S. & Wasserman, S. Object permanence in 5-month-old infants. Cognition 20, 191–208 (1985).
Cacchione, T. & Call, J. Do gorillas (Gorilla gorilla) and orangutans (Pongo pygmaeus) fail to represent objects in the context of cohesion violations?. Cognition 116, 193–203 (2010).
Kellman, P. J. & Spelke, E. S. Perception of partly occluded objects in infancy. Cognit. Psychol. 15, 483–524 (1983).
Spelke, E. S. Principles of object perception. Cognit. Sci. 14, 29–56 (1990).
Baillargeon, R. Physical reasoning in infancy. In M. S. Gazzaniga (Ed.-in-chief), The Cognitive Neurosciences, pp. 181–204. (Cambridge, 1995).
Baillargeon, R. & Devos, J. Object permanence in young infants—Further evidence. Child Dev. 62, 1227–1246 (1991).
Nawroth, C. et al. Farm animal cognition-linking behavior, welfare and ethics. Front. Vet. Sci. 6, 24 (2019).
Hauser, M. D. Searching for food in the wild: A nonhuman primate’s expectations about invisible displacement. Dev. Sci. 4, 84–93 (2001).
Haemmerli, S., Thill, C., Amici, F. & Cacchione, T. Domestic horses (Equus ferus caballus) fail to intuitively reason about object properties like solidity and weight. Anim. Cognit. 21, 441–446 (2018).
Hood, B. M., Santos, L. R. & Fieselman, S. Two-year-olds’ naïve predictions for horizontal trajectories. Dev. Sci. 3, 328–332 (2000).
Hood, B. M. Gravity does rule for falling events. Dev. Sci. 1, 59–63 (1998).
Kim, I. K. & Spelke, E. S. Infants’ sensitivity to effects of gravity on visible object motion. J. Exp. Psychol. Hum. Percept. Perform. 18, 385 (1992).
Kim, I. K. & Spelke, E. S. Perception and understanding of effects of gravity and inertia on object motion. Dev. Sci. 2, 339–362 (1999).
Cacchione, T., Call, J. & Zingg, R. Gravity and solidity in four great ape species (Gorilla gorilla, Pongo pygmaeus, Pan troglodytes, Pan paniscus): vertical and horizontal variations of the table task. J. Comp. Psychol. 123, 168–180 (2009).
Hood, B. M., Hauser, M. D., Anderson, L. & Santos, L. R. Gravity biases in a non-human primate?. Dev. Sci. 2, 35–41 (1999).
Osthaus, B., Slater, A. M. & Lea, S. E. G. Can dogs defy gravity? A comparison with the human infant and a non-human primate. Dev. Sci. 6, 489–497 (2003).
Hood, B. M. Gravity rules for 2-to 4-year olds?. Cognit. Dev. 10, 577–598 (1995).
Hauser, M. D., Williams, T., Kralik, J. D. & Moskovitz, D. What guides a search for food that has disappeared? Experiments on cotton-top tamarins (Saguinus oedipus). J. Comp. Psychol. 115, 140 (2001).
Southgate, V. & Gomez, J. C. Searching beneath the shelf in macaque monkeys: Evidence for a gravity bias or a foraging bias?. J. Comp. Psychol. 120, 314 (2006).
Russon, A. E. et al. Innovation and intelligence in orangutans. Orangutans: Geographic variation in behavioral ecology and conservation, 279–298 (2009).
MacLean, E. L. et al. The evolution of self-control. Proc. Natl. Acad. Sci. 111, E2140–E2148 (2014).
Aureli, F. et al. Fission-fusion dynamics: New research frameworks. Curr. Anthropol. 49, 627–654 (2008).
Grove, M. & Dunbar, R. I. Local objects, distant symbols: fission-fusion social systems and the evolution of human cognition. 11392086 (2015).
Hare, B. & Tomasello, M. Human-like social skills in dogs?. Trends Cognit. Sci. 9, 439–444 (2005).
Zeder, M. A. Central questions in the domestication of plants and animals. Evolut. Anthropol. Issues News Rev. 15, 105–117 (2006).
Caicoya, A. L. et al. Innovation across 13 ungulate species: Problem solvers are less integrated in the social group and less neophobic. Proc. R. Soc. B: Biol. Sci. 290, 20222384 (2023).
Thornton, P. K. Livestock production: Recent trends, future prospects. Philos. Trans. R. Soc. B: Biol. Sci. 365, 2853–2867 (2010).
Herrero, M. et al. The roles of livestock in developing countries. Animal 7, 3–18 (2013).
Shultz, S. & Dunbar, R. I. Both social and ecological factors predict ungulate brain size. Proc. R. Soc. B: Biol. Sci. 273, 207–215 (2006).
Fiset, S. & Plourde, V. Object permanence in domestic dogs (Canis lupus familiaris) and gray wolves (Canis lupus). J. Comp. Psychol. 127, 115 (2013).
Addison, W. E. & Baker, E. Agonistic behavior and social organization in a herd of goats as affected by the introduction of non-members. Appl. Anim. Ethol. 8, 527–535 (1982).
Baskin, L. & Danell, K. Ecology of ungulates: A handbook of species in Eastern Europe and Northern and Central Asia (Springer Science & Business Media, 2003).
Gordon, I. J. & Prins, H. H. T. The ecology of browsing and grazing (Springer, 2008).
Lu, C. D. Grazing behavior and diet selection of goats. Small Rumin. Res. 1, 205–216 (1988).
Leuthold, W. African ungulates: A comparative review of their ethology and behavioral ecology. 36428107 (2012).
Schroeder, N. M. et al. Spatial and seasonal dynamic of abundance and distribution of guanaco and livestock: Insights from using density surface and null models. Plos One 9, e85960 (2014).
Puig, S., Rosi, M. I., Videla, F. & Mendez, E. Summer and winter diet of the guanaco and food availability for a High Andean migratory population (Mendoza, Argentina). Mamm. Biol. 76, 727–734 (2011).
Wilson, D. E. & Mittermeier, R. A. Handbook of the mammals of the world, volume 2: Hoofed mammals (Lynx Ediciones Barcelona, 2011).
Call, J. Representing space and objects in monkeys and apes. Cognit. Sci. 24, 397–422 (2000).
Call, J. Apes know that hidden objects can affect the orientation of other objects. Cognition 105, 1–25 (2007).
Bräuer, J., Kaminski, J., Riedel, J., Call, J. & Tomasello, M. Making inferences about the location of hidden food: Social dog, causal ape. J. Comp. Psychol. 120, 38 (2006).
Beran, M. J., Beran, M. M. & Menzel, C. R. Spatial memory and monitoring of hidden items through spatial displacements by chimpanzees (Pan troglodytes). J. Comp. Psychol. 119, 14 (2005).
Brooks, M. E. et al. glmmTMB balances speed and flexibility among packages for zero-inflated generalized linear mixed modeling. R J 9, 378 (2017).
Baayen, R. H., Davidson, D. J. & Bates, D. M. Mixed-effects modeling with crossed random effects for subjects and items. J. Mem. Lang. 59, 390–412 (2008).
Dobson, A. J. & Barnett, A. G. An introduction to generalized linear models (CRC Press, 2018).
Lenth, R. & Lenth, M. R. Package ‘lsmeans’. Am. Stat. 34, 216–221 (2018).
Hartig, F. & Hartig, M. F. Package ‘dharma’. R package (2017).
Lüdecke, D., Ben-Shachar, M. S., Patil, I., Waggoner, P. & Makowski, D. Performance: An R package for assessment, comparison and testing of statistical models. J. Open Source Softw 6(60), 1–8 (2021).
Miles, J. R-squared, adjusted R‐squared. In: Everitt BS, Howell DC (eds) Encyclopedia of statistics in behavioral science (Wiley, 2005).
Lind, J., Enquist, M. & Ghirlanda, S. Animal memory: A review of delayed matching-to-sample data. Behav. Process. 117, 52–58 (2015).
Bracis, C. & Mueller, T. Memory, not just perception, plays an important role in terrestrial mammalian migration. Proc. R. Soc. B: Biol. Sci. 284, 20170449 (2017).
Merkle, J. A. et al. Spatial memory shapes migration and its benefits: Evidence from a large herbivore. Ecol. Lett. 22, 1797–1805 (2019).
Hill, A., Collier-Baker, E. & Suddendorf, T. Inferential reasoning by exclusion in great apes, lesser apes, and spider monkeys. J. Comp. Psychol. 125, 91 (2011).
Sabbatini, G. & Visalberghi, E. Inferences about the location of food in capuchin monkeys (Cebus apella) in two sensory modalities. J. Comp. Psychol. 122, 156 (2008).
Schloegl, C., Schmidt, J., Boeckle, M., Weiß, B. M. & Kotrschal, K. Grey parrots use inferential reasoning based on acoustic cues alone. Proc. R. Soc. B: Biol. Sci. 279, 4135–4142 (2012).
Schmitt, V. & Fischer, J. Inferential reasoning and modality dependent discrimination learning in olive baboons (Papio hamadryas anubis). J. Comp. Psychol. 123, 316 (2009).
Zuberbühler, K. Causal knowledge of predators’ behaviour in wild Diana monkeys. Anim. Behav. 59, 209–220 (2000).
Sinclair, A. R., Mduma, S. & Brashares, J. S. Patterns of predation in a diverse predator–prey system. Nature 425, 288–290 (2003).
Barber-Meyer, S. M. & Mech, L. D. Factors influencing predation on juvenile ungulates and natural selection implications (2008).
Sinclair, A. R. E. Does interspecific competition or predation shape the African ungulate community?. J. Anim. Ecol. 54, 899–918 (1985).
Crosmary, W.-G., Valeix, M., Fritz, H., Madzikanda, H. & Côté, S. D. African ungulates and their drinking problems: Hunting and predation risks constrain access to water. Anim. Behav. 83, 145–153 (2012).
Amici, F., Aureli, F. & Call, J. Fission-fusion dynamics, behavioral flexibility, and inhibitory control in primates. Curr. Biol. 18, 1415–1419 (2008).
Shettleworth, S. in The evolution of cognition, edited by C. Heyes & L. Huber (MIT Press, 2000), pp. 43–60.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
A.S. and F.A. conceptualized the study; A.W., R.H. and F.A. coordinated and supervised data collection; A.S. collected the data; A.S. and F.A. analysed the data and drafed the M.S., with strong feedback from the other co-authors.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Schaffer, A., Widdig, A., Holland, R. et al. Evidence of object permanence, short-term spatial memory, causality, understanding of object properties and gravity across five different ungulate species. Sci Rep 14, 13718 (2024). https://doi.org/10.1038/s41598-024-64396-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-64396-8
- Springer Nature Limited