
Abstract
In this paper, two problems involving nonlinear time fractional hyperbolic partial differential equations (PDEs) and time fractional pseudo hyperbolic PDEs with nonlocal conditions are presented. Collocation technique for shifted Chebyshev of the second kind with residual power series algorithm (CTSCSK-RPSA) is the main method for solving these problems. Moreover, error analysis theory is provided in detail. Numerical solutions provided using CTSCSK-RPSA are compared with existing techniques in literature. CTSCSK-RPSA is accurate, simple and convenient method for obtaining solutions of linear and nonlinear physical and engineering problems.
Similar content being viewed by others
Introduction
Mathematical modeling of various nonlinear phenomena, which can be expressed using nonlinear differential equations (DEs) is more complex and difficult than modeling linear phenomena. Such phenomena have an important role in the study of many scientific fields and often described by ordinary differential equations (ODEs) and PDEs. Although solving PDEs is more difficult than solving ODEs, these equations are widely used in physics and mathematical problems. The fractional arrangement has been used to generalize these equations by researchers in recent decades, and these equations have been known as fractional partial differential equations (FPDEs). It is difficult to obtain accurate solutions to such equations in their nonlinear state. In the literature, several mathematical methods are presented for solving these equations as Adomian decomposition method (ADM)1,2, variational iteration method (VIM)3, Iterative Laplace transform method4, Sumudu transform method5, finite difference method6, Tau method7, homotopy perturbation method (HPM)8, wavelet methods9, homotopy analysis method10, variational homotopy perturbation iteration method (VHPIM)11, finite element method12, modified HPM13 and Jacobi collocation14.
RPSA is an efficient, powerful and simple technique to create a power series solution that can be handled without discretization, linearization, and perturbation for linear and nonlinear equations. RPSA does not need any changes while transforming from lower to higher order. Hence, the technique can be utilized directly for problem by choosing suitable preliminary guess approximation. Researchers have used RPSA for solving different types of models, such as fuzzy differential equations15, fractional Burger types equations16, fractional gas dynamic equations17, KdV-Burgers equation18, Whitham–Broer–Kaup equations19, fractional time Cahn–Hilliard, Gardner equations20,21, Swift–Hohenberg equation22, fractional diffusion equation23, Burgers–Huxley equations24, Navier–Stokes equations25 and Lane–Emden equations26.
Hyperbolic PDEs is a type of more significance nonlinear models in physics of mathematical. In the last few years, there exist analytical and numerical methods to solve these problems27,28. In Ref.8 Odibat and Momani obtained the analytic and approximate solution for hyperbolic PDEs by using VIM and ADM. Khalid et al.29 constructed an efficient schemes called Perturbation iteration algorithm (PIA) to get approximate solutions for hyperbolic PDEs. Das and Gupta30 employed HAM for obtaining the approximate solution for nonlinear hyperbolic PDEs of fractional order. Pseudo-hyperbolic equations is type of high order PDEs with combination of partial derivatives concerning space and time, which describes various phenomena of physical including, diffusion of reaction, vibrations of longitudinal and physics of plasma31,32. In recent years, researchers and scientists have presented the numerical and analytical methods to solve the pseudo hyperbolic equation33,34,35. In Refs.32,36, the authors studied uniqueness, existence and stability analysis of numerical solutions for pseudo hyperbolic PDES.
The fundamental target of this study is to employ an approximate solution for time fractional hyperbolic PDEs and time fractional pseudo hyperbolic PDEs with nonlocal conditions. The method of solution is to apply properties of shifted Chebyshev polynomials of second kind (SCPSK) to reduce space hyperbolic PDEs and pseudo hyperbolic PDEs with nonlocal conditions into system of fractional ODEs, these FODEs system have been solved by employing RPSA.
The outline work is prepared as: The main definitions of Caputo fractional derivative (CFD) and fractional power series (FPS) are given in Section “Preliminaries”. Some characteristics for Chebyshev polynomials of the second kind (CPSK) are presented in Section “General characteristics of spectral Chebyshev polynomials”. The theorem utilized to discuss the method’s error analysis is presented in Section “Error analysis”. The methodology has been applied to two applications in Section “Applications of methodology”. Numerical solutions and simulations to show CTSCSK-RPSA efficiency are presented in Section “Numerical simulation”. In Section “Conclusion”, a final conclusion is drawn.
Preliminaries
In this section, we give some essential definitions of CFD and FPS.
Definition 1
37,38,39 The CFD of order \(\beta\) for a function \(\varTheta (t)\in \texttt{C}_{q}\), \(q \geq -1\) is defined as belows:
Definition 2
37,38,39 The Caputo fractional partial derivative (CFPD) of order \(\beta\) for a function \(\varTheta (x,t)\in \texttt{C}_{q}\), \(q \geq -1\) is given by:
The CFD satisfies linear property similar to integer order differentiation:
where \(\lambda _1, \lambda _2, \ldots , \lambda _m\) are constants.
The major properties for the Caputo derivative are:
where \(\lceil \beta \rceil\) denote to the smallest integer greater than or equal to \(\beta\), where \({\mathcal {N}}_{0}= \{0,1,2, \ldots \}\).
Definition 3
40,41 The power series which has the formula
is called FPS about \(\tau _0\).
There exist the three possibilities for convergence of the FPS \(\sum _{l=0}^\infty \ \vartheta _{ l}(\tau -\tau _0) ^{l\beta }\), which are:
-
The series converges only for \(\tau = \tau _0\), that is, the radius of convergence equal zero.
-
The series converges for all \(\tau \ge \tau _0\), that is, the radius of convergence equal \(\infty\).
-
The series converges for \(\tau _0\le \tau <\tau _0+{\mathcal {R}}\), for some positive real number \({\mathcal {R}}\) and diverges for \(\tau >\tau _0 +{\mathcal {R}}\) , where \({\mathcal {R}}\) is the radius of convergence for the FPS.
Definition 4
40 The multiple FPS at \(\tau =\tau _0\) is defined as:
General characteristics of spectral Chebyshev polynomials
We recall some main expressions of spectral SCPSK that are utilized in this paper.
Definition 5
42 The spectral CPSK \({\mathfrak {T}} _m({\textbf{s}})\) over the interval \([-1,1]\) can be defined as:
where \({\textbf{s}}=cos(\xi ),\) \(\xi \in [0,\pi ].\)
The orthogonality formula of CPSK with respect to weight function \(\omega ({\textbf{s}})=\sqrt{1-{\textbf{s}}^2}\) as:
The recurrence form of polynomials \({\mathfrak {T}} _m({\textbf{s}})\) can be written as:
where
The explicit formula of \({\mathfrak {T}} _m({\textbf{s}})\) as:
where \(\lceil \frac{m}{2}\rceil\) denotes the integral part of \(\frac{m}{2}\).
Definition 6
42 The SCPSK \({\mathfrak {T}}^{*} _m(x)\) is defined on [0, 1] as:
The orthogonal property of SCPSK with respect to weight function \(\omega ^{*}(x)=\sqrt{x-x^2}\) is given as below:
The recurrence relation of SCPSK:
where
The analytical expressions of SCPSK \({\mathfrak {T}}^{*}_m(x)\) of degree m can be given as:
The function \(u(x)\in {\mathfrak {L}}_{2}[0,1]\) can be defined by SCPSK \({\mathfrak {T}}^{*}_i(x)\) as follows:
where the coefficients \(\vartheta _{i}\) are given by:
In practice, we truncate the infinite series up to \((n+1)\) terms of SCPSK as follows:
Theorem 1
Assume that \(u_n(x)\) be series approximation of spectral SCPSK defined by Eq. (9), then \({\mathfrak {D}}^{\beta }u_n (x)\) is given as:
where \(\varOmega _{i,k} ^{(\beta )}\) is defined as:
Proof
(see Ref.42). \(\square\)
Error analysis
In this section, the following theorem proves an error analysis of the method.
Theorem 2
Suppose a function \(\varPhi (x) \in [0,1]\) which is continuous and differentiable up to \((n + 1)\) times. Let \(u_n(x) =\displaystyle \sum _{i=0}^n \vartheta _{i}{\mathfrak {T}}^{*}_i(x)\) be the best square approximation function of \(\varPhi (x)\), then
where \({\mathbb {M}}=\max _{x\in [0,1]}\ \varPhi ^{(n+1)}(x)\) and \({\mathcal {K}}= \max \{x_0,x-x_0\}\).
Proof
We approximate function \(\varPhi (x)\) by Taylor series as:
where \(x_0\in [0,1]\) and \(\zeta \in [x_0,x]\).
Let
then
Since \(u_n(x) = {\mathop {\sum }\limits _{i=0}^n} {{\vartheta _{i}}^{*}_{i(x)}}\), is the best square approximation function of \(\varPhi (x)\), we have
Hence \({\mathcal {K}}=\max \{x_0,x-x_0\}\), we get
By taking square root of both sides for Eq. (15), we get
\(\square\)
Applications of methodology
The principal objective of this section is to obtain an approximate solution for time fractional hyperbolic PDEs and time fractional pseudo hyperbolic PDEs with nonlocal conditions.
-
Time fractional hyperbolic PDEs29
$$\begin{aligned} {\mathfrak {D}}^{\beta }_{t} \varTheta (x,t)-\mu \ {\mathfrak {D}}^{2}_{x} \varTheta (x,t)- {\mathbb {L}}\left( \varTheta (x,t)\right) =0, \ 1<\beta \le 2,\ x\in [0,X],\ t >0, \end{aligned}$$(17)with subject to initial conditions (ICs) and boundary conditions (BCs):
$$\begin{aligned} {\left\{ \begin{array}{ll} \varTheta (x,0)=f_1(x), &{} {\mathfrak {D}}_{t} \varTheta (x,0)=f_2(x),\\ \varTheta (0,t)= A_1(t), &{} \varTheta (X,t)=A_2(t), \\ \end{array}\right. } \end{aligned}$$(18)where \(\mu \in {\mathbb {R}}\) and \({\mathbb {L}}\) is non linear operator. Assume \(\varTheta _n(x,t)\) is approximated as:
$$\begin{aligned} \varTheta _n(x,t)=\sum _{i=0}^n \vartheta _{i}(t){\mathfrak {T}}^{*}_i(x). \end{aligned}$$(19)Let us to utilize the approximation of \(\varTheta _n(x,t)\) which is defined in Eq. (19) as following steps:
-
Step (I)
By applying Theorem (1) and Eqs. (17) and (19), we have
$$\begin{aligned} \sum _{i=0}^n {\mathfrak {D}}^{\beta }_{t} \vartheta _{i}(t){\mathfrak {T}}^{*}_i(x)-\mu \sum _{i=\lceil \beta \rceil }^n \sum _{k=0}^{i-\lceil \beta \rceil } \vartheta _{i}(t) \varOmega _{i,k} ^{(\beta )} x^{i-k-\beta }-{\mathbb {L}}\left( \sum _{i=0}^n \vartheta _{i}(t){\mathfrak {T}}^{*}_i(x)\right) =0. \end{aligned}$$(20) -
Step (II)
Now we collocate Eq. (20) at \(x_p,\) \(p = 0,1,2, ldots n-\lceil \beta \rceil\) and the collocation point of SCPSK \({\mathfrak {T}}^{*}_{n+1-\lceil \beta \rceil } (x)\), we have a system of fractional order differential equations (FODEs) as:
$$\begin{aligned} \sum _{i=0}^n {\mathfrak {D}}^{\beta }_{t} \vartheta _{i}(t){\mathfrak {T}}^{*}_i(x_p)-\mu \sum _{i=\lceil \beta \rceil }^n \sum _{k=0}^{i-\lceil \beta \rceil } \vartheta _{i}(t) \varOmega _{i,k} ^{(\beta )} x_p^{i-k-\beta }-{\mathbb {L}}\bigg (\sum _{i=0}^n \vartheta _{i}(t){\mathfrak {T}}^{*}_i(x_p)\bigg )=0. \end{aligned}$$(21) -
Step (III)
Substituting Eq. (19) into Eqs. (18), we can obtain \((\lceil \beta \rceil +1)\) algebraic equations as:
$$\left\{ {\begin{array}{*{20}l} {{\text{ }}\sum\limits_{{i = 0}}^{n} {\vartheta _{i} } (0){\mathfrak{T}}_{i}^{*} (x) = f_{1} (x),} \hfill \\ {\sum\limits_{{i = 0}}^{n} {{\mathfrak{D}}_{t} } \vartheta _{i} (0){\mathfrak{T}}_{i}^{*} (x) = f_{2} (x),} \hfill \\ \end{array} } \right.$$(22)where BCs
$$\left\{ {\begin{array}{*{20}l} {{\text{ }}\sum\limits_{{i = 0}}^{n} {\vartheta _{i} } (t){\mathfrak{T}}_{i}^{*} (0) = A_{1} (t),} \hfill \\ {\sum\limits_{{i = 0}}^{n} {\vartheta _{i} } (t){\mathfrak{T}}_{i}^{*} (X) = A_{2} (t).} \hfill \\ \end{array} } \right.$$(23)
To obtain the unknown coefficients \(\vartheta _0(t),\vartheta _1(t),\vartheta _2(t), \ldots ,\vartheta _n(t)\), combing Eqs. (21)–(23), we have system of FODEs, which can be solved by utilizing RPSA. To determine the unknown coefficients of \(\vartheta _0(t),\vartheta _1(t),\vartheta _2(t), \ldots ,\vartheta _n(t)\), we take \(n=2\) and \(n=3\) in Eq. (21), respectively:
$$\begin{aligned} {\left\{ \begin{array}{ll} {\mathfrak {D}}^{\beta }_{t} \vartheta _{0}(t)- {\mathfrak {D}}^{\beta }_{t} \vartheta _{2}(t)-32\mu \vartheta _{2}(t)-{\mathbb {L}}\bigg (\vartheta _{0}(t)-\vartheta _{2}(t)\bigg )=0. \end{array}\right. } \end{aligned}$$(24)$$\begin{aligned} {\left\{ \begin{array}{ll} \begin{aligned} {\mathfrak {D}}^{\beta }_{t} \vartheta _{0}(t)-{\mathfrak {D}}^{\beta }_{t} \vartheta _{1}(t)+ {\mathfrak {D}}^{\beta }_{t} \vartheta _{3}(t)-\mu \big (32\vartheta _{2}(t)-96\vartheta _{3}(t)\big )-{\mathbb {L}}\bigg (\vartheta _{0}(t) -\vartheta _{1}(t)+\vartheta _{3}(t)\bigg )=0,\\ {\mathfrak {D}}^{\beta }_{t} \vartheta _{0}(t)+{\mathfrak {D}}^{\beta }_{t} \vartheta _{1}(t)- {\mathfrak {D}}^{\beta }_{t} \vartheta _{3}(t)-\mu \big (32\vartheta _{2}(t)+96\vartheta _{3}(t)\big )-{\mathbb {L}}\bigg (\vartheta _{0}(t) +\vartheta _{1}(t)-\vartheta _{3}(t)\bigg )=0 \end{aligned} \end{array}\right. } \end{aligned}$$(25)By solving Eq. (25), we get
$$\left\{ {\begin{array}{*{20}l} {{\text{ }}{\mathfrak{D}}_{t}^{\beta } \vartheta _{0} (t) - 32\mu \vartheta _{2} (t) - \frac{1}{2}[{\mathbb{L}}(\vartheta _{0} (t) - \vartheta _{1} (t) + \vartheta _{3} (t)) + {\mathbb{L}}(\vartheta _{0} (t) + \vartheta _{1} (t) - \vartheta _{3} (t))] = 0,} \hfill \\ {{\mathfrak{D}}_{t}^{\beta } \vartheta _{1} (t) - {\mathfrak{D}}_{t}^{\beta } \vartheta _{3} (t) - 96\mu \vartheta _{3} (t) + \frac{1}{2}[{\mathbb{L}}(\vartheta _{0} (t) - \vartheta _{1} (t) + \vartheta _{3} (t)) - {\mathbb{L}}(\vartheta _{0} (t) + \vartheta _{1} (t) - \vartheta _{3} (t))] = 0.} \hfill \\ \end{array} } \right.$$(26)By solving Eq. (23) at \(n=2\) and \(n=3\), respectively. Then we get
$$\left\{ {\begin{array}{*{20}l} {\vartheta _{1} (t) = \frac{1}{4}(A_{2} (t) - A_{1} (t)),} \hfill \\ {\vartheta _{2} (t) = \frac{1}{6}(A_{1} (t) + A_{2} (t)) - \frac{1}{3}\vartheta _{0} (t).} \hfill \\ \end{array} } \right.$$(27)$$\left\{ {\begin{array}{*{20}l} {{\text{ }}\vartheta _{2} (t) = \frac{1}{6}(A_{1} (t) + A_{2} (t)) - \frac{1}{3}\vartheta _{0} (t),} \hfill \\ {\vartheta _{3} (t) = \frac{1}{8}(A_{2} (t) - A_{1} (t)) - \frac{1}{2}\vartheta _{1} (t).} \hfill \\ \end{array} } \right.$$(28)By substituting Eqs. (27) and (28) into Eqs. (24) and (26), then
$$\left\{ {\begin{array}{*{20}l} {{\mathfrak{D}}_{t}^{\beta } \vartheta _{0} (t) - \frac{1}{8}{\mathfrak{D}}_{t}^{\beta } (A_{1} (t) + A_{2} (t)) - 4\mu (A_{1} (t) + A_{2} (t))} \hfill \\ {\quad + 8\mu \vartheta _{0} (t) - \frac{3}{4}{\mathbb{L}}\left( {\frac{4}{3}\;\vartheta _{0} (t) - \frac{1}{6}[A_{1} (t) + A_{2} (t)]} \right),} \hfill \\ \end{array} } \right.$$(29)$$\left\{ {\begin{array}{*{20}l} {{\mathfrak{D}}_{t}^{\beta } \vartheta _{0} (t) - \frac{{16\mu }}{3}[A_{1} (t) + A_{2} (t)] + \frac{{32\mu }}{3}\vartheta _{0} (t)} \hfill \\ {\quad - \frac{1}{2}[{\mathbb{L}}(\vartheta _{0} (t) - \frac{3}{2}\vartheta _{1} (t) + \frac{1}{8}[A_{2} (t) - A_{1} (t)])} \hfill \\ {\quad + {\mathbb{L}}(\vartheta _{0} (t) + \frac{3}{2}\vartheta _{1} (t) - \frac{1}{8}[A_{2} (t) - A_{1} (t)])],} \hfill \\ \end{array} } \right.$$(30)$$\left\{ {\begin{array}{*{20}l} {{\mathfrak{D}}_{t}^{\beta } \vartheta _{1} (t) - \frac{1}{{12}}{\mathfrak{D}}_{t}^{\beta } (A_{2} (t) - A_{1} (t)) - 8\mu [A_{2} (t) - A_{1} (t)]} \hfill \\ {\quad + 32\mu \vartheta _{1} (t) + \frac{1}{3}[{\mathbb{L}}(\vartheta _{0} (t) - \frac{3}{2}\vartheta _{1} (t) + \frac{1}{8}[A_{2} (t) - A_{1} (t)])} \hfill \\ {\quad - {\mathbb{L}}(\vartheta _{0} (t) + \frac{3}{2}\vartheta _{1} (t) - \frac{1}{8}[A_{2} (t) - A_{1} (t)])] = 0.} \hfill \\ \end{array} } \right.$$(31)RPSA assumes the solution of Eq. (29) using FPS at \(t_0=0\) as:
$$\begin{aligned} \vartheta _{0}(t)=\varUpsilon _{0}+\varUpsilon _{1}t +\sum _{r=1}^\infty \sum _{j=0}^l h_{rj}\dfrac{t^{r\beta +j}}{\varGamma (r\beta +j+1)}. \end{aligned}$$(32)Next, let \(\vartheta _{0(s,l)}(t)\) denote the sth truncated series of \(\vartheta _{0}(t)\) which take the form:
$$\begin{aligned} \vartheta _{0(s,l)}(t)=\varUpsilon _{0}+\varUpsilon _{1}t +\sum _{r=1}^s\sum _{j=0}^l h_{rj}\dfrac{t^{r\beta +j}}{\varGamma (r\beta +j+1)}, \forall s=1,2,... \ and\ l=0,1, \end{aligned}$$(33)where \(\varUpsilon _{0}\) and \(\varUpsilon _{1}\) can be obtained by solving Eqs. (22) and (27). The RPSA assumes the solution of Eqs. (30) and (31) using FPS at \(t_0=0\) as:
$$\begin{aligned} {\left\{ \begin{array}{ll} \begin{aligned} \vartheta _{0}(t)=\varPsi _{0}+\varPsi _{1}t +\sum _{r=1}^\infty \sum _{j=0}^l f_{rj}\dfrac{t^{r\beta +j}}{\varGamma (r\beta +j+1)},\\ \vartheta _{1}(t)=\eta _{0}+\eta _{1}t +\sum _{r=1}^\infty \sum _{j=0}^l d_{rj}\dfrac{t^{r\beta +j}}{\varGamma (r\beta +j+1)}. \end{aligned} \end{array}\right. } \end{aligned}$$(34)Let \(\vartheta _{0(s,l)}(t)\) and \(\vartheta _{1(s,l)}(t)\) denote the sth truncated series of \(\vartheta _{0}(t)\) and \(\vartheta _{1}(t)\) which take the form:
$$\begin{aligned} {\left\{ \begin{array}{ll} \begin{aligned} \vartheta _{0(s,l)}(t)=\varPsi _{0}+\varPsi _{1}t +\sum _{r=1}^s\sum _{j=0}^l f_{rj}\dfrac{t^{r\beta +j}}{\varGamma (r\beta +j+1)},\\ \vartheta _{1(s,l)}(t)=\eta _{0}+\eta _{1}t +\sum _{r=1}^s\sum _{j=0}^l d_{rj}\dfrac{t^{r\beta +j}}{\varGamma (r\beta +j+1)},\\ \forall s=1,2,\ldots \ and\ l=0,1, \end{aligned} \end{array}\right. } \end{aligned}$$(35)where \(\varPsi _{0},\) \(\varPsi _{1},\) \(\eta _{0}\) and \(\eta _{1}\) can be obtained by solving Eqs. (28) and (22). We can write the residual functions of Eqs. (29)–(31) as:
$$\left\{ {\begin{array}{*{20}l} {\Re {\mathfrak{e}\mathfrak{s}}_{{(s,l)}} (t) = {\mathfrak{D}}_{t}^{\beta } \vartheta _{{0(s,l)}} (t) - \frac{1}{8}{\mathfrak{D}}_{t}^{\beta } (A_{1} (t) + A_{2} (t)) - 4\mu (A_{1} (t) + A_{2} (t))} \hfill \\ {\quad + 8\mu \vartheta _{{0(s,l)}} (t) - \frac{3}{4}{\mathbb{L}}(\frac{4}{3}\;\vartheta _{{0(s,l)}} - \frac{1}{6}[A_{1} (t) + A_{2} (t)]),} \hfill \\ \end{array} } \right.$$(36)$$\left\{ {\begin{array}{*{20}l} {\Re {\mathfrak{e}\mathfrak{s}1}_{{(s,l)}} (t) = {\mathfrak{D}}_{t}^{\beta } \vartheta _{{0(s,l)}} (t) - \frac{{16\mu }}{3}[A_{1} (t) + A_{2} (t)] + \frac{{32\mu }}{3}\vartheta _{{0(s,l)}} (t)} \hfill \\ {\quad - \frac{1}{2}[{\mathbb{L}}(\vartheta _{{0(s,l)}} (t) - \frac{3}{2}\vartheta _{{1(s,l)}} (t) + \frac{1}{8}[A_{2} (t) - A_{1} (t)])} \hfill \\ {\quad + {\mathbb{L}}(\vartheta _{{0(s,l)}} (t) + \frac{3}{2}\vartheta _{{1(s,l)}} (t) - \frac{1}{8}[A_{2} (t) - A_{1} (t)])],} \hfill \\ \end{array} } \right.$$(37)$$\left\{ {\begin{array}{*{20}l} {\Re {\mathfrak{e}\mathfrak{s}2}_{{(s,l)}} (t) = {\mathfrak{D}}_{t}^{\beta } \vartheta _{{1(s,l)}} (t) - \frac{1}{{12}}{\mathfrak{D}}_{t}^{\beta } (A_{2} (t) - A_{1} (t)) - 8\mu [A_{2} (t) - A_{1} (t)]} \hfill \\ {\quad + 32\mu \vartheta _{{1(s,l)}} (t) + \frac{1}{3}[{\mathbb{L}}(\vartheta _{{0(s,l)}} (t) - \frac{3}{2}\vartheta _{{1(s,l)}} (t) + \frac{1}{8}[A_{2} (t) - A_{1} (t)])} \hfill \\ {\quad - {\mathbb{L}}(\vartheta _{{0(s,l)}} (t) + \frac{3}{2}\vartheta _{{1(s,l)}} (t) - \frac{1}{8}[A_{2} (t) - A_{1} (t)])],} \hfill \\ \end{array} } \right.$$(38)and
$$\left\{ {\begin{array}{*{20}l} {{\mathfrak{D}}_{t}^{{(r - 1)\beta }} {\mathfrak{D}}_{t}^{j} \;\Re {\mathfrak{e}\mathfrak{s}}_{{(s,l)}} (t_{0} ) = 0,} \hfill \\ {{\mathfrak{D}}_{t}^{{(r - 1)\beta }} {\mathfrak{D}}_{t}^{j} \;\Re {\mathfrak{e}\mathfrak{s}1}_{{(s,l)}} (t_{0} ) = 0,} \hfill \\ {{\mathfrak{D}}_{t}^{{(r - 1)\beta }} {\mathfrak{D}}_{t}^{j} \;\Re {\mathfrak{e}\mathfrak{s}2}_{{(s,l)}} (t_{0} ) = 0,} \hfill \\ {\forall r = 1,2, \ldots ,s\;and\;j = 0,1, \ldots ,l.} \hfill \\ \end{array} } \right.$$(39) -
Step (I)
-
Time fractional pseudo hyperbolic PDEs with nonlocal conditions34
$$\begin{aligned} {\mathfrak {D}}^{\beta }_{t} \varTheta (x,t)-\varepsilon \ {\mathfrak {D}}_{t} {\mathfrak {D}}^{2}_{x} \varTheta (x,t)-{\mathfrak {D}}^{2}_{x} \varTheta (x,t)-W(x,t)=0, \ 1<\beta \le 2,\ x\in [0,X],\ t \in [0,T], \end{aligned}$$(40)subject to ICs and BCs:
$$\begin{aligned} {\left\{ \begin{array}{ll} \varTheta (x,0)=V_1(x),\ \quad {\mathfrak {D}}_{t} \varTheta (x,0)=V_2(x), x \in [0,X],\\ \varTheta (0,t)= \rho _1 (t)+\displaystyle \int _{0}^{X} \varTheta (x,t)dx = B_1(t),\ t \in [0,T], &{} \\ \varTheta (X,t)=\rho _2 (t)+\displaystyle \int _{0}^{X} \varTheta (x,t)dx=B_2(t), \ t \in [0,T].\\ \end{array}\right. } \end{aligned}$$(41)Let us utilize the approximation of \(\varTheta _n(x,t)\) which defined in Eq. (19) as following steps:
-
Step (I)
By substituting Theorem (1) and Eq. (19) into Eq. (40), we obtain
$$\begin{aligned} \sum _{i=0}^n {\mathfrak {D}}^{\beta }_{t} \vartheta _{i}(t){\mathfrak {T}}^{*}_i(x)-\varepsilon \sum _{i=\lceil \beta \rceil }^n \sum _{k=0}^{i-\lceil \beta \rceil } {\mathfrak {D}}_{t}\vartheta _{i}(t) \varOmega _{i,k} ^{(\beta )} x^{i-k-\beta }-\sum _{i=\lceil \beta \rceil }^n \sum _{k=0}^{i-\lceil \beta \rceil } \vartheta _{i}(t) \varOmega _{i,k} ^{(\beta )} x^{i-k-\beta }-W(x,t)=0. \end{aligned}$$(42) -
Step (II)
By collocating Eq. (42) at the roots \(x_p,\) \(p = 0,1,2, \ldots n-\lceil \beta \rceil\) and the collocation point of SCPSK \({}^{*}_{n+1-\lceil \beta \rceil } (x)\), we get a system of FODEs as:
$$\begin{aligned} \sum _{i=0}^n {\mathfrak {D}}^{\beta }_{t} \vartheta _{i}(t){\mathfrak {T}}^{*}_i(x_p)-\varepsilon \sum _{i=\lceil \beta \rceil }^n \sum _{k=0}^{i-\lceil \beta \rceil } {\mathfrak {D}}_{t}\vartheta _{i}(t) \varOmega _{i,k} ^{(\beta )} x_p^{i-k-\beta }-\sum _{i=\lceil \beta \rceil }^n \sum _{k=0}^{i-\lceil \beta \rceil } \vartheta _{i}(t) \varOmega _{i,k} ^{(\beta )} x_p^{i-k-\beta }-W(x_p,t)=0. \end{aligned}$$(43) -
Step (III)
By substituting Eq. (19) into Eq. (41), we can obtain \((\lceil \beta \rceil +1)\) algebraic equations as:
$${\left\{ \begin{array}{ll}\sum _{i=0}^n \vartheta _{i}(0){\mathfrak {T}}^{*}_i(x)=V_1(x),\\ \sum _{i=0}^n {\mathfrak {D}}_{t}\vartheta _{i}(0){\mathfrak {T}}^{*}_i(x)=V_2(x),\end{array}\right. }$$(44)where BCs
$$\begin{aligned} {\left\{ \begin{array}{ll} \begin{aligned} \sum _{i=0}^n \vartheta _{i}(t){\mathfrak {T}}^{*}_i(0)= B_1(t),\\ \sum _{i=0}^n \vartheta _{i}(t){\mathfrak {T}}^{*}_i(X)=B_2(t). \end{aligned} \end{array}\right. } \end{aligned}$$(45)To obtain the unknown coefficients \(\vartheta _0(t),\vartheta _1(t),\vartheta _2(t), \ldots ,\vartheta _n(t)\), combing Eqs. (43)–(45), we have system of FODEs which can be solved by utilizing RPSA. To determine the unknown coefficients of \(\vartheta _0(t),\vartheta _1(t),\vartheta _2(t), \ldots ,\vartheta _n(t)\), we take \(n=3\) in Eq. (43), we have
$$\begin{aligned} {\left\{ \begin{array}{ll} \begin{aligned} {\mathfrak {D}}^{\beta }_{t} \vartheta _{0}(t)-{\mathfrak {D}}^{\beta }_{t} \vartheta _{1}(t)+ {\mathfrak {D}}^{\beta }_{t} \vartheta _{3}(t)-\varepsilon {\mathfrak {D}}_{t}\big (32\vartheta _{2}(t)-96\vartheta _{3}(t)\big )-\big (32\vartheta _{2}(t) -96\vartheta _{3}(t)\big )-W\left(\dfrac{1}{4},t\right)=0,\\ {\mathfrak {D}}^{\beta }_{t} \vartheta _{0}(t)+{\mathfrak {D}}^{\beta }_{t} \vartheta _{1}(t)- {\mathfrak {D}}^{\beta }_{t} \vartheta _{3}(t)-\varepsilon {\mathfrak {D}}_{t}\big (32\vartheta _{2}(t)+96\vartheta _{3}(t)\big )-\big (32\vartheta _{2}(t) +96\vartheta _{3}(t)\big )-W\left(\dfrac{3}{4},t\right)=0. \end{aligned} \end{array}\right. } \end{aligned}$$(46)By solving Eq. (45), we get
$$\begin{aligned} {\left\{ \begin{array}{ll} \begin{aligned} \vartheta _{2}(t)=\dfrac{1}{6}\bigg (B_1(t)+B_2(t)\bigg )-\dfrac{1}{3}\vartheta _{0}(t),\\ \vartheta _{3}(t)= \dfrac{1}{8}\bigg (B_2(t)-B_1(t)\bigg )-\dfrac{1}{2}\vartheta _{1}(t).\\ \end{aligned} \end{array}\right. } \end{aligned}$$(47)By solving Eq. (46), we obtain
$${\left\{ \begin{array}{ll} {\mathfrak {D}}^{\beta }_{t} \vartheta _{0}(t)-32\varepsilon {\mathfrak {D}}_{t}\vartheta _{2}(t)-32\varepsilon \vartheta _{2}(t)-\dfrac{1}{2}\bigg (W(\dfrac{1}{4},t)+W(\dfrac{3}{4},t)\bigg )=0,\\ {\mathfrak {D}}^{\beta }_{t} \vartheta _{1}(t)- {\mathfrak {D}}^{\beta }_{t} \vartheta _{3}(t)-96\varepsilon {\mathfrak {D}}_{t}\vartheta _{3}(t)-96 \vartheta _{3}(t)+\dfrac{1}{2}\bigg (W(\dfrac{1}{4},t)-W(\dfrac{3}{4},t)\bigg )=0.\end{array}\right. }$$(48)By substituting Eq. (47) into Eq. (48), then
$${\left\{ \begin{array}{ll} {\mathfrak {D}}^{\beta }_{t} \vartheta _{0}(t)-\dfrac{16\epsilon }{3}\ {\mathfrak {D}}_{t}\bigg (B_1(t)+B_2(t)\bigg )+\dfrac{32\epsilon }{3}{\mathfrak {D}}_{t}\vartheta _{0}(t)\\ -\dfrac{16}{3}\ \bigg (B_1(t)+B_2(t)\bigg )+\dfrac{32}{3}\vartheta _{0}(t)-\dfrac{1}{2}\bigg (W(\dfrac{1}{4},t) +W(\dfrac{3}{4},t)\bigg )=0,\\\end{array}\right. }$$(49)$$\begin{aligned} {\left\{ \begin{array}{ll} \begin{aligned} {\mathfrak {D}}^{\beta }_{t} \vartheta _{1}(t)- \dfrac{1}{12}{\mathfrak {D}}^{\beta }_{t} \bigg (B_2(t)-B_1(t)\bigg )-8\varepsilon {\mathfrak {D}}_{t}\bigg (B_2(t)-B_1(t)\bigg )+32\varepsilon {\mathfrak {D}}_{t}\vartheta _{1}(t)\\ -8\bigg (B_2(t)-B_1(t)\bigg )+32\vartheta _{1}(t) +\dfrac{1}{3}\bigg (W(\dfrac{1}{4},t)-W(\dfrac{3}{4},t)\bigg )=0. \end{aligned} \end{array}\right. } \end{aligned}$$(50)Let \(\vartheta _{0(s,l)}(t)\) and \(\vartheta _{1(s,l)}(t)\) denote the sth truncated series of \(\vartheta _{0}(t)\) and \(\vartheta _{1}(t)\) which defined in Eq. (35), then the residual functions of Eqs. (49) and (50) take the form:
$$\begin{aligned} {\left\{ \begin{array}{ll} \begin{aligned} \mathfrak {Res1}_{(s,l)}(t)={\mathfrak {D}}^{\beta }_{t} \vartheta _{0(s,l)}(t)-\dfrac{16\epsilon }{3}\ {\mathfrak {D}}_{t}\bigg (B_1(t)+B_2(t)\bigg )+\dfrac{32\epsilon }{3}{\mathfrak {D}}_{t}\vartheta _{0(s,l)}(t)\\ -\dfrac{16}{3}\ \bigg (B_1(t)+B_2(t)\bigg )+\dfrac{32}{3}\vartheta _{0(s,l)}(t)-\dfrac{1}{2}\bigg (W(\dfrac{1}{4},t) +W(\dfrac{3}{4},t)\bigg ), \end{aligned} \end{array}\right. } \end{aligned}$$(51)$${\left\{ \begin{array}{ll}\mathfrak {Res2}_{(s,l)}(t)={\mathfrak {D}}^{\beta }_{t} \vartheta _{1(s,l)}(t)- \dfrac{1}{12} {\mathfrak {D}}^{\beta }_{t} \bigg (B_2(t)-B_1(t)\bigg )-8\varepsilon {\mathfrak {D}}_{t}\bigg (B_2(t)-B_1(t)\bigg )\\ +32\varepsilon \ {\mathfrak {D}}_{t}\vartheta _{1(s,l)}(t)-8\bigg (B_2(t)-B_1(t)\bigg )+32\vartheta _{1(s,l)}(t) +\dfrac{1}{3}\bigg (W(\dfrac{1}{4},t)-W(\dfrac{3}{4},t)\bigg ),\end{array}\right. }$$(52)and
$${\left\{ \begin{array}{ll} {\mathfrak {D}}^{(r-1)\beta }_{t}{\mathfrak {D}}^{j}_{t}\ \mathfrak {Res1}_{(s,l)}(t_0)=0,\\ {\mathfrak {D}}^{(r-1)\beta }_{t}{\mathfrak {D}}^{j}_{t}\ \mathfrak {Res2}_{(s,l)}(t_0)=0, \\ \forall r=1,2, \ldots ,s \ and\ j=0,1, \ldots ,l.\end{array}\right. }$$(53)
-
Step (I)
Numerical simulation
Two problems are established in this section to demonstrate the effectiveness and applicability of the CTSCSK-RPSA.
Problem 1. Suppose the following nonlinear time fractional hyperbolic PDEs29 which are described in Eq. (17), where \(\mu =0\) and \({\mathbb {L}}\bigg ( \varTheta (x,t)\bigg )=\dfrac{\partial }{\partial x}\bigg (\varTheta (x,t) \dfrac{\partial \varTheta (x,t)}{\partial x}\bigg )\), then
with ICs and BCs:
The exact solution at \(\beta =2\) is \(\varTheta (x,t)=\dfrac{x^2}{(t+1)^2}.\)
Table 1 presents the approximate solutions obtained by CTSCSK-RPSA with VIM, ADM8, VHPIM, HPM11 and PIA29. Table 2 present the CTSCSK-RPSA approximate solutions at various values of \(\beta\). Figure 1 represents comparison between exact and approximate solutions at \(\beta =2\). Figure 2 shows the 3D graph of approximate solution at \(\beta =\{1.9,1.8,1.7\}\). Figure 3 displays the behavior of approximate solution for fractional order \(\beta\) and \(t=0.1\) in two dimensional graphs.

Exact and approximate solutions at \(\beta =2\) of Problem 1.

Behavior of approximate at different values of \(\beta\) for Problem 1.

2D graphics of exact and approximate solutions at different fractional order of \(\beta\) for Problem 1.
Problem 2. Consider time fractional pseudo hyperbolic PDEs with nonlocal conditions34
with ICs and BCs:
The exact solution at \(\beta =2\) is \(\varTheta (x,t)=x^3 e^{t}.\)
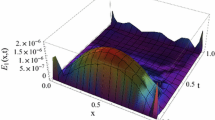
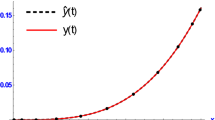
Table 3 shows the numerical solution obtained by CTSCSK-RPSA and RPSA with absolute error. Table 4 present the CTSCSK-RPSA approximate solutions at various values of \(\beta\). Figure 4 represents comparison between exact and approximate solutions at \(\beta =2\). Figure 5 shows the 3D graph of approximate solution at \(\beta = \{1.9,1.8,1.7\}\). Figure 6 displays the behavior of approximate solution for fractional order \(\beta\) and \(t=1\) in two dimensional graphs.

Exact and approximate solutions at \(\beta =2\) of Problem 2.

Behavior of approximate at different values of \(\beta\) for Problem 2.

2D graphics of exact and approximate solutions at different fractional order of \(\beta\) for Problem 2.
Conclusion
In this study, the CTSCSK-RPSA is successfully applied to solve nonlinear time fractional hyperbolic PDEs and time fractional pseudo hyperbolic PDEs with nonlocal conditions. Error analysis of the proposed problems was studied. It is clear that the numerical and simulation results obtained by CTSCSK-RPSA at \(\beta =2\) are close to the exact solutions and they are more accurate than previous methods in the literature. All results were done with MATLAB R2017b (9.3.0.713579). Finally, we point out that CTSCSK-RPSA is a convenient and efficient solutions for for various types of fractional linear and nonlinear problems that arise in engineering and applied physics.
Data availability
Data used to support the findings of this study are included in the article.
References
Arafa, A. A. M. & Rida, S. Z. Numerical solutions for some generalized coupled nonlinear evolution equations. Math. Comput. Model. 56, 268–277 (2012).
El-Sayed, A. M. A., Rida, S. Z. & Arafa, A. A. M. On the solutions of the generalized reaction-diffusion model for bacterial colony. Acta Applicandae Mathematicae. 110, 1501–1511 (2010).
Odibat, Z. M. & Momani, S. Application of variational iteration method to nonlinear differential equations of fractional order. Int. J. Nonlinear Sci. Numer. Simulat. 7, 27–34 (2006).
Turut, V. & Güzel, N. On solving partial differential equations of fractional order by using the variational iteration method and multivariate padé approximation. Eur. J. Pure Appl. Math. (2013).
Al-Khaled, K. Numerical solution of time-fractional partial differential equations using Sumudu decomposition method. Rom. J. Phys. 60, 99–110 (2015).
Sweilam, N. H., Khader, M. M. & Nagy, A. M. Numerical solution of two-sided space-fractional wave equation using finite difference method. J. Comput. Appl. Math. 235, 2832–2841 (2011).
Bhrawy, A. H., Taha, T. M. & Machado, J. A. T. A review of operational matrices and spectral techniques for fractional calculus. Nonlinear Dyn. 81, 1023–1052 (2015).
Odibat, Z. & Momani, S. Numerical methods for nonlinear partial differential equations of fractional order. Appl. Math. Model. 32, 28–39 (2008).
Saeed, A. & Saeed, U. Sine-cosine wavelet method for fractional oscillator equations. Math. Methods Appl. Sci. 42, 6960–6971 (2019).
Arafa, A. A. M., Rida, S. Z. & Mohamed, H. Approximate analytical solutions of Schnakenberg systems by homotopy analysis method. Appl. Math. Model. 36, 4789–4796 (2012).
Neamaty, A., Agheli, B. & Darzi, R. Variational iteration method and He’s polynomials for time-fractional partial differential equations. Progress Fract. Different. Appl. 1, 47–55 (2015).
Jiang, Y. & Ma, J. High-order finite element methods for time-fractional partial differential equations. J. Comput. Appl. Math. 235, 3285–3290 (2011).
Odibat, Z. & Momani, S. Modified homotopy perturbation method: application to quadratic Riccati differential equation of fractional order. Chaos Solitons Fractals. 36, 167–174 (2008).
Bhrawy, A. H. A Jacobi spectral collocation method for solving multi-dimensional nonlinear fractional sub-diffusion equations. Numer. Algorithms. 73, 91–113 (2016).
Arqub, O. A. Series solution of fuzzy differential equations under strongly generalized differentiability. J. Adv. Res. Appl. Math. 5, 31–52 (2013).
Kumar, A. & Kumar, S. Residual power series method for fractional Burger types equations. Nonlinear Eng. 5, 235–244 (2016).
Abuteen, E. & Freihet, A. Analytical and numerical solution for fractional gas dynamic equations using residual power series method. in Proceedings of International Conference on Fractional Differentiation and its Applications (ICFDA). (2018).
El-Ajou, A., Arqub, O. A. & Momani, S. Approximate analytical solution of the nonlinear fractional KdV-Burgers equation: A new iterative algorithm. J. Comput. Phys. 293, 81–95 (2015).
Wang, L. & Chen, X. Approximate analytical solutions of time fractional Whitham-Broer-Kaup equations by a residual power series method. Entropy. 17, 6519–6533 (2015).
Arafa, A. & Elmahdy, G. Application of residual power series method to fractional coupled physical equations arising in fluids flow. Int. J. Differential Equations. 2018, (2018).
Al-Smadi, M., Al-Omari, S., Karaca, Y. & Momani, S. Effective analytical computational technique for conformable time-fractional nonlinear gardner equation and Cahn-Hilliard equations of fourth and sixth order emerging in dispersive media. J. Function Spaces. 2022, (2022).
Prakasha, D. G., Veeresha, P. & Baskonus, H. M. Residual power series method for fractional Swift-Hohenberg equation. Fractal Fractional. 3, 9 (2019).
Bayrak, M. A., Demir, A. & Ozbilge, E. Numerical solution of fractional diffusion equation by Chebyshev collocation method and residual power series method. Alexandria Eng. J. 59, 4709–4717 (2020).
Freihet, A. A. & Zuriqat, M. Analytical solution of fractional Burgers-Huxley equations via residual power series method. Lobachevskii J. Math. 40, 174–182 (2019).
Khan, H. et al. The fractional view analysis of the Navier-Stokes equations within Caputo operator. Chaos Solitons Fractals X. 8, 100076 (2022).
Saadeh, R., Burqan, A. & El-Ajou, A. Reliable solutions to fractional Lane-Emden equations via Laplace transform and residual error function. Alexandria Eng. J. 61, 10551–10562 (2022).
Bahia, G., Ouannas, A., Batiha, I. M. & Odibat, Z. The optimal homotopy analysis method applied on nonlinear time-fractional hyperbolic partial differential equations. Numer. Methods Partial Different. Equations. 37, 2008–2022 (2021).
Arshed, S. Numerical study of time-fractional hyperbolic partial differential equations. J. Math. Comput. Sci. 17, 53–65 (2017).
Khalid, M., Khan, F. S., Zehra, H. & Shoaib, M. A highly accurate numerical method for solving time-fractional partial differential equation. Progress Fractional Differentiation Appl. Int. J. 2, 227–232 (2016).
Das, S. & Gupta, P. K. Homotopy analysis method for solving fractional hyperbolic partial differential equations. Int. J. Comput. Math. 88, 578–588 (2011).
Fedotov, I., Shatalov, M. & Marais, J. Hyperbolic and pseudo-hyperbolic equations in the theory of vibration. Acta Mechanica. 227, 3315–3324 (2016).
Zhao, Z. & Li, H. A continuous Galerkin method for pseudo-hyperbolic equations with variable coefficients. J. Math. Anal. Appl. 473, 1053–1072 (2019).
Modanli, M. Comparison of Caputo and Atangana-Baleanu fractional derivatives for the pseudohyperbolic telegraph differential equations. Pramana. 96, 7 (2022).
Modanli, M., Abdulazeez, S. T. & Husien, A. M. A residual power series method for solving pseudo hyperbolic partial differential equations with nonlocal conditions. Numer. Methods Partial Differential Equations. 37, 2235–2243 (2021).
Zhang, Y., Niu, Y. & Shi, D. Nonconforming \(H^{1}\)Galerkin mixed finite element method for pseudo-hyperbolic equations. Am. J. Comput. Math. 2, 269–273 (2012).
Mesloub, S., Aboelrish, M. R. & Obaidat, S. Well posedness and numerical solution for a non-local pseudohyperbolic initial boundary value problem. Int. J. Comput. Math. 96, 2533–2547 (2019).
Kilbas, A. A., Srivastava, H. M. & Trujillo, J. J. Theory and applications of fractional differential equations. Elsevier. 204 (2006).
Kilbas, A. A., Marichev, O. I. & Samko, S. G.: Fractional integrals and derivatives (theory and applications). (1993).
Podlubny, I. Fractional differential equations, mathematics in science and engineering. (1999).
El-Ajou, A., Abu, O., Al Zhour, Z. A. & Momani, S. New results on fractional power series: Theories and applications. Entropy. 15, 5305–5323 (2013).
El-Ajou, A., Abu Arqub, O. & Al-Smadi, M. A general form of the generalized Taylor’s formula with some applications. Appl. Math. Comput. 256, 851-859 (2015).
Sweilam, N. H., Nagy, A. M. & El-Sayed, A. A. Second kind shifted Chebyshev polynomials for solving space fractional order diffusion equation. Chaos Solitons Fractals. 73, 141–147 (2015).
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB).
Author information
Authors and Affiliations
Contributions
Saad. Z. Rida jointly supervised this study. Anas. A. M. Arafa conceived the study. Hussein. S. Hussein and I. Ameen revised the manuscript. Marwa. M. M. Mostafaconducted the analyses and wrote the manuscript. All authors agree to submit the manuscript in its current form.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Rida, S.Z., Arafa, A.A.M., Hussein, H.S. et al. Spectral shifted Chebyshev collocation technique with residual power series algorithm for time fractional problems. Sci Rep 14, 8683 (2024). https://doi.org/10.1038/s41598-024-58493-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-58493-x
- Springer Nature Limited