
Abstract
Respiratory sensitivity and pneumonia are possible outcomes of the coronavirus (COVID-19). Surface characteristics like temperature and sunshine affect how long the virus survives. This research article analyzes COVID-19 mathematical model behavior based on symptomatic and non-symptomatic individuals. In the reproductive model, the best result indicates the intensity of the epidemic. Our model remained stable at a certain point under controlled conditions after we evaluated a specific element. This approach is in place of traditional approaches such as Euler’s and Runge–Kutta’s. An unusual numerical approach known as the non-standard finite difference (NSFD) scheme is used in this article. This numerical approach gives us positivity. A dependable numerical analysis allowed us to evaluate different approaches and verify our theoretical results. Unlike the widely used Euler and RK4 approaches, we investigated the benefits of implementing NSFD schemes. By numerically simulating COVID-19 in a variety of scenarios, we demonstrated how our theoretical concepts work. The simulation findings support the usefulness of both approaches.
Similar content being viewed by others

Introduction
As humans, we are born with some active viruses and dormant microorganisms on Earth. Infectious diseases can be caused by viruses, bacteria, fungus, and arthropods. Currently, we are facing pandemic diseases such as HIV, COVID-19, Malaria, Influenza, Tuberculosis, Zika virus infection, Smallpox, measles, yellow fever, Cholera, and Leprosy all around the world1,2,3,4. Through history, humanity has faced numerous obstacles and problems, including world wars, infectious diseases, earthquakes, catastrophic floods, and climate change The effects of these incidents are gravely detrimental to the lives of individuals and civilizations alike. In addition to these challenges, infectious diseases continue to pose a significant threat to humanity, negatively affecting several countries' economies, education systems, and tourism industries. Among the deadly diseases that have affected humans are HIV, plague, and most recently, COVID-195,6,7,8.
The first case of COVID-19 was detected on 19-12-2019 in Wuhan, China—a highly risky situation9. The COVID-19 infection rapidly spread worldwide, being more infectious and pandemic-prone than SARS10,11,12. Due to the rapid increase in cases, the World Health Organization declared COVID-19 a global pandemic on March 11th. Common symptoms of COVID-19 include fever, cough, congestion, fatigue, headaches, vomiting, diarrhea, shortness of breath, and a decrease in lymphocyte count13,14. To minimize human loss, crowds were restricted, and city lockdowns were implemented. In this situation, researchers and policymakers are working on finding a cure or vaccine for the aforementioned disease to stabilize and control it in the coming days. Some countries have successfully developed vaccines, and they are currently available15,16,17,18. The incubation period for COVID-19 typically spans five days, but it can extend up to fourteen days.
It has been noted that individuals differ in their susceptibility and ability to tolerate COVID-19. The fact that elderly individuals typically have worse clinical results than younger ones is also widely acknowledged19,20,21,22,23 According to earlier studies, COVID-19 patients who are older are more likely to pass away. The Susceptible-Infected-Recovered (SIR) epidemic model, developed by Chikina et al., simulates the effects of age-targeted mitigation activities for a COVID-19-like outbreak in the US by accounting for established age-contact patterns. Mortality and intensive care unit utilization can be considerably decreased by applying stringent age-targeted mitigation strategies24,25,26,27,28. An additional investigation verified that distinct dynamic patterns are displayed by COVID-19 epidemic processes across age and gender categories. In physics, chemistry, electromagnetics, and mechanics, fractional-order differential equations are commonly used. Fractional differential equations (FDEs) are widely used to identify various physical systems, control theory, simulate viscoelastic materials, and model numerous complex processes.
The propagation and dynamic behavior of COVID-19 have been analyzed using various mathematical models. These models can aid in comprehending the transmission of infectious diseases and developing preventative measures29,30,31,32. Peter et al.33 used real-world data to evaluate how various management strategies affect the transmission of COVID-19 among humans. The authors in34,35,36,37 investigated a mathematical model of COVID-19 that incorporates both the resistant compartment and a quarantine category. This model is different from earlier models discussed in the literature because of the resistive and quarantine classes. By improving the sources of control activities using mathematical models, we can successfully curb the spread of the disease. Furthermore, mathematical models have been employed by researchers to extensively investigate the novel coronavirus from different perspectives38,39,40,41,42.
Researchers focused on studying stability, numerical techniques, and local/global dynamics. In a related study, Lu, H43, and colleagues examined the impact of different COVID-19 management strategies using real-world data and a mathematical model. They used scaled conjugate gradient neural networks to analyze a nonlinear mathematical model for COVID-19. In this article the author's discussed the different scheme like Euler, RK-4 and a discrete NSFD scheme. The NSFD scheme was developed to study biological sustainability and other model features. The goal of using strategies like Euler, RK-4, and advanced NSFD was to control COVID-19 spread and assess threats to public health but the NSFD scheme gave us a positive result for all step size. We also discussed the local and global stability of endemic and disease-free equilibria for NSFD Scheme which were examined and showed to be suitable and unconditionally stable for the continuous model, providing precise and effective results.
The paper is structured in the following way: Sect. 1 introduces the mathematical model and comprehensively investigates its parameters. In Sect. 2, the model equilibria and the primary fundamental reproduction number are explained. Section 3, we discussed the comparative analysis of numerical scheme, in the subsections of this we create the Euler, Rk-4 and discrete NSFD scheme, and in the Subsections explores certain fundamental features, such as positivity and boundedness. Our study demonstrates that the NSFD scheme is a potent and efficient technique that accurately depicts the continuous model. We evaluate the local stability of both equilibria by employing the Schur-Cohn criterion in Subsection 3.4. In Subsection 3.5, we utilize the Lyapunov function theory to cover the global stability. Our theoretical findings are strengthened by numerical simulations. A conclusion section is included at the end of the manuscript that summarizes everything.
Parameter explanation of the model
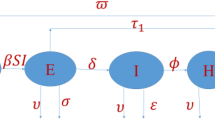
The system which we discussed43 consists of four differential equations. These equations represent the population \(N\left(t\right)\), which is divided into four categories: susceptible \(S(t)\), Infected \(I(t)\), quarantined \(Q(t)\), recovered \(R(t)\) where \(N\left(t\right)\)= \(S\left(t\right)+I\left(t\right)+Q\left(t\right)+R(t)\).
From the Fig. 1, we can derive a mathematical model for COVID-19.
where \(N\) is total population, so we reduced the \(N\) from the above equation for simplified the model. Hence our system now becomes,

The flowchart of our model.
Parameters and their explanations
The following are some important concepts related to COVID-19:
\(\vartheta\) | Natural population growth: This refers to the increase in population due to births and immigration, minus the decrease in population caused by deaths and emigration |
\(\beta\) | Transition rate from I to R: This refers to the rate at which infected individuals recover from COVID-19 and become immune |
\(d\) | Cure rate for quarantined individuals: This is the rate at which individuals who are quarantined due to COVID-19 recover and become immune |
\({\gamma }_{3}\) | COVID-19 infection-related death rate: This is the rate of deaths caused by COVID-19 among infected individuals |
\({\alpha }_{1}\) | Rate of COVID-19 death among those under quarantine: This is the rate of deaths caused by COVID-19 among individuals who are under quarantine |
\({\mu }_{3}\) | Natural population decline: This refers to the decrease in population due to deaths and emigration, minus the increase in population caused by births and immigration |
\({\psi }_{1}\) | Interval between infection and healing: This is the time it takes for an infected individual to recover from COVID-19 and become immune |
The equilibrium and the basic reproduction number (\({{\varvec{R}}}_{0})\)
Modelling the equilibrium state
In order to find the disease-free equilibrium point (DFE), we can equate the model (2) to zero. It becomes easy to calculate DFE for model (2) when the DFE is represented by \({E}_{0}=\left(\frac{\vartheta }{{\mu }_{3}},\text{0,0},0\right)\). The given model (2) is instantaneously cracked for the state-run variables \(S\),\(I,Q,R,\) to invention the disease endemic equilibrium (DEE) point. If the DEE point is mentioned as \({E}^{*}\left({S}^{*},{I}^{*},{Q}^{*},{R}^{*}\right)\), then model (2) yields \({S}^{*}=\frac{\left(\vartheta -\beta {S}^{*}{I}^{*}\right)}{{\mu }_{3}}\), \({I}^{*}=\frac{\beta {S}^{*}{I}^{*}}{\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}\) , \({Q}^{*}=\frac{d{I}^{*}}{\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}\) , and \({R}^{*}=\frac{{\gamma }_{3}{I}^{*}+{\psi }_{1}{Q}^{*}}{{\mu }_{3}}\)
Basic reproduction number \({({\varvec{R}}}_{0})\)
It's difficult to determine the exact number of secondary infections, as it depends on factors like the spread of the disease, population size, and duration of illness. However, epidemiological studies can provide a rough estimate called the basic reproduction number44. To calculate \({R}_{0}\), we operate Model (2), which includes the translation matrix V(x) and the transmission matrix F(x).
As \({R}_{0}=\rho (F{V}^{-1})\), therefore simple calculation employs.
Comparative analysis of schemes
In this article, our goal is to illustrate the superior performance of the NSFD scheme compared to other numerical schemes such as Euler Rk4. It has been noted that the Euler and Rk4 schemes exhibit divergence as the time step size increases. Conversely, the NSFD scheme maintains non-divergence even with considerably larger time step sizes. Consequently, we can assert that the NSFD scheme stands out as the optimal choice among numerical schemes. In the ensuing discussion, we will thoroughly examine all three schemes Euler, Rk4, and NSFD and provide both numerical data and graphical representations to showcase their respective performances.
The Euler scheme
The Euler scheme can be developed for the system (2) as shown below
Similarly,
and
and
The RK-4 scheme
Our challenges often use the RK-4 scheme unless otherwise noted. The RK-4 scheme was developed for system (2).we take \(S={A}_{1}, I={B}_{1}, Q={C}_{1} {\text{and}} R={D}_{1}\), then.
Itération 1
Itération 2
Itération 3
Itération 4
The final stage is
Where \(\Delta {z}_{1},\Delta {z}_{2},\Delta {z}_{3}{\text{and}} \Delta {z}_{4}\) are the weighted of \({A}_{1},{A}_{2}{,A}_{3}{,A}_{4}{,B}_{1},{B}_{2 },{B}_{3},{B}_{4},{C}_{1},{C}_{2}, {C}_{3},{C}_{4}{,D}_{1}\), \({D}_{2},{D}_{3 }\text{and }{D}_{4}\).
The general form is.
Finally, we get
The NSFD scheme
The value of h (time step size) represents the numerical approximations of \(S\left(t\right)\),\(I\left(t\right)\),\(Q(t)\), \({\text{and}} R\left(t\right)\) at \(t=mh\) as per model (2). To denote these numerical estimates, we use the notation \({S}_{n}, {I}_{n},{Q}_{n}, {R}_{n}\), where \(n\) is a non-negative integer45,46. Subsequently, model (2) enables us to express.
The explicit form of the NSFD scheme (3) becomes after simplification.
Positivity and boundedness of NSFD scheme
We suppose that \({S}_{0}\ge 0,{I}_{0}\ge 0,{Q}_{0}\ge 0,{R}_{0}\ge 0,\)., which are the starting values that constitute the discrete scheme (4), are all non-negative. According to the underlying assumptions, these variables also have nonnegative estimated amounts \({S}_{m}\ge 0{, I}_{m}\ge 0,{Q}_{m}\ge 0,{R}_{m}\ge 0\) Hence, explanations of NSFD scheme (4) suggest the positivity of scheme (4), i.e. \({S}_{m+1}\ge 0,{I}_{m+1}\ge 0,{Q}_{m+1}\ge 0,{R}_{m+1}\ge 0\). In deliberate the boundedness of results of the NSFD arrangement (4), we consider \({W}_{n}={S}_{m}+{I}_{m}+{Q}_{m}+{R}_{m}\). Then.
I.e.
Therefore, we get
If \(0<W\left(0\right)<\frac{\vartheta }{{\mu }_{3}}\), then by Gromwell’s inequality is used to produce.
Since \({\left(\frac{1}{(1+h{\mu }_{3}}\right)}^{p}<1\), so we gain \(W_{n} \to \frac{\vartheta }{{\mu_{3} }}\) as \(m \to \infty\). This indicates that the feasible region becomes and the solutions of system (4) are bounded.
We evaluate the local stability of both equilibria in the NSFD scheme (4).
Local stability of equilibria
Lemma 1 follows. We will apply the Schur-Cohn criterion47,48 to demonstrate that the DFE point is LAS.
Lemma 1
The roots of \({\mathcal{L}}^{2}-B\mathcal{L}+C=0\) assurance \(\left|{\mathcal{L}}_{p}\right|<1 \text{for } p=\text{1,2}\), \(\Leftrightarrow\) the necessities assumed in the succeeding remain satisfied.
-
1.
\(C<1\),
-
2.
\(1+B+C>0\),
-
3.
\(1-B+C>0\),
anywhere \(B\) represents trace and \(C\) shows determinant of the Jacobian matrix.
Theorem 1
\(\forall\) \(h>0\), the DFE point is LAS for NSFD model (4) whenever \({R}_{0}<1\).
Proof On
The information, we can express the Jacobian matrix in the following manner:
In (5), \({f}_{1}\), \({f}_{2}\), \({f}_{3}\), and \({f}_{4}\) (4) are provided. As you can see, every derivative used in (6) is noted here.
When all of the aforementioned derivatives are entered into Eq. (6), we get
By putting the \({E}_{0}=\left(\frac{\vartheta }{{\mu }_{3}},\text{0,0},0\right)\), the matrix (7).
To explain the eigenvalues, we rely on the following assumptions:
i.e.
After the simplify, (8) yields
The Eq. (9) provides \({\mathcal{L}}_{1}=\frac{1}{1+h{\mu }_{3}}<1,{\mathcal{L}}_{2}=\frac{1}{\left(1+h{\mu }_{3}\right)}<1.\)
The other eigenvalues, we take
i.e.
Comparing Eq. (10) with \({\mathcal{L}}^{2}-B\mathcal{L}+C=0\), we get \(B=\left(\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}+\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}\right)\) and \(C=\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}\).
If \({R}_{0}<1,\)
-
1.
\(C=\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}<1\).
-
2.
\(1+B+C=1+\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}+\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}+\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}>0\).
-
3.
\(1-B+C=1-\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}-\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}+\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}>0\).
The Schur-Cohn criterion is therefore satisfied whenever \({R}_{0}<1\). As a result, NSFD scheme (4) DFE point \({E}_{0}\) is LAS if \({R}_{0}<1\).
Theorem 2
\(h>0\), the DEE point is LAS for NSFD model (4) whenever \({R}_{0}>1\).
Proof
We develop it as follows, following a similar procedure to that by which we acquired the Jacobian matrix in Theorem 1
By placing DEE point \({E}^{*}\), Eq. (11)
To discuss the eigenvalues, we take
i.e.
After simplification, (12) yields
It has two roots (13) are \({\mathcal{L}}_{1}=\frac{1}{1+h\left(\beta {I}_{m}^{*}+{\mu }_{3}\right)}<1\), and \({\mathcal{L}}_{2}=\frac{1}{\left(1+h{\mu }_{3}\right)}<1\). To find other eigenvalues, we take
Comparing (14) with (10), we get \(B=\left(\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}+\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}\right)\) and \(=\) \(\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}\). If \({R}_{0}>1,\) then.
-
1.
\(C=\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}<1.\)
-
2.
\(1+B+C=1+\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}+\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}+\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}>0.\)
-
3.
\(1-B+C=1-\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}-\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}+\frac{1}{1+h\left({\mu }_{3}+{\gamma }_{3}+{\alpha }_{1}+d\right)}\frac{1}{1+h\left({\mu }_{3}+{\psi }_{1}+{\alpha }_{1}\right)}>0.\)
Accordingly, when \({R}_{0}>1\), all of the longings of Schur-Cohn criterion quantified in Lemma 1 are pleased. So, on condition that that \({R}_{0}>1\), the DEE point \({E}^{*}\) of the NSFD scheme (4) is LAS.
Global stability of equilibria
The process by which we obtained the Jacobian matrix in Theorem 1 is analogous to the one we use to derive it.
Theorem 3
\(h>0\), the DFE point is GAS for NSFD model (4) \({R}_{0}\le 1\).
Proof
Construct a Lyapunov function.
where \({\Psi }_{i}>0\) for all \(i=\text{1,2},\text{3,4}\). Hence, \({P}_{n}>0\) for all \({S}_{n}>0, {I}_{n}>0, {Q}_{n}>0, {\text{and}} {R}_{n}\) In addition, \({P}_{n}=0,\) if and only if \({S}_{n}={S}^{0},{I}_{n}={I}^{0}, {Q}_{n}={Q}^{0}, {\text{and}}{R}_{n}={R}^{0}\).
We take
i.e.
Using the inequality \({\text{ln}}x\le x-1\), (15) becomes
The value of (16) can be expressed by making use of system (3).
Let \({\Psi }_{i}\) for \(i=\text{1,2},\text{3,4}\) be selected so that
By putting the above values, from (17) we get
Simple calculations yields
As \({S}^{0}=\frac{\vartheta }{{\mu }_{3}}\) which implies \({S}^{0}{\mu }_{3}=\vartheta\). By substituting \(\vartheta\) in (18), we obtain
Hence, if \({R}_{0}\le 1\) then from (19) employs \(\Delta {P}_{m}\le 0\) \(\forall\) \(m\ge 0\). Consequently, \({P}_{m}\) is a \({a}_{n}\ge {a}_{n+1}\). Therefore, \(\exists\) constant \(P\) such that \({{\text{lim}}}_{n\to \infty }{P}_{m}=P\) which recommends that \({{\text{lim}}}_{n\to \infty }\left({P}_{m+1}-{P}_{n}\right)=0\). From system (3) and \({{\text{lim}}}_{m\to \infty }\Delta {P}_{m}=0\) we have \({{\text{lim}}}_{n\to \infty }{S}_{m}={S}^{0}\). For the case \({R}_{0}<1,\) we have \({{\text{lim}}}_{m\to \infty }{S}_{m+1}={S}^{0}\) and \({{\text{lim}}}_{n\to \infty }{I}_{m}=0,{{\text{lim}}}_{m\to \infty }{Q}_{n}=0.\) Since scheme (3), we succeed \({{\text{lim}}}_{n\to \infty }{I}_{m}=0,{{\text{lim}}}_{n\to \infty }R=0\) and \({{\text{lim}}}_{n\to \infty }{Q}_{m}=0.\) For the situation \({R}_{0}=1,\) we have \({{\text{lim}}}_{n\to \infty }{S}_{m+1}={S}^{0}.\) Thus, from system (3), we obtain \({{\text{lim}}}_{n\to \infty }{R}_{m}=0,{{\text{lim}}}_{m\to \infty }{Q}_{m}=0,{{\text{lim}}}_{m\to \infty }{I}_{m}=0\) and \({{\text{lim}}}_{n\to \infty }{R}_{m}=0\). Hence, \({E}_{0}\) is GAS.
Conclusions
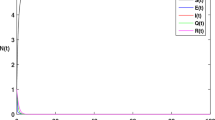
In this study, we used a math model to analyze COVID-19, considering both symptomatic and asymptomatic conditions. We set a critical threshold value to explore the stability of key points in the continuous model. For this model, we developed algorithms like Euler, RK-4, and NSFD. Euler and RK-4's reliability depends on step size, with larger steps leading to more unpredictable results. In contrast, NSFD consistently converges regardless of step size. We examined the stability of key points for the NSFD scheme, considering both local and global aspects. By taking monotonic sequences into account, we assessed global stability. The NSFD scheme highlighted similarities between discrete and continuous models, offering advantages for society and medicine. Which we showed in the Figs. 2, 3 and 4. These findings can aid in predicting the course of the COVID-19 pandemic. Numerical simulations were incorporated at each step to support our theoretical framework.

Numerical simulation for model (1) of30 by using Euler scheme with \(\left(\mathbf{a}\right) h = 0.01,\left(\mathbf{b}\right) h = 0.1,\left(\mathbf{c}\right) h=1,\left(\mathbf{d}\right) h=2\). (a–d) Stable CFE point \(\vartheta =10.48,\beta =0.00714, {\mu }_{3}=0.0004,{\alpha }_{1}=0.42386, d=0.7 , {\psi }_{1}=0.475,{\gamma }_{3}=0.0135\).

Numerical simulation for model (2) of30 by using RK4 scheme with \(\left(\mathbf{a}\right) h = 0.01,\left(\mathbf{b}\right) h = 0.1,\left(\mathbf{c}\right) h=1,\left(\mathbf{d}\right) h=2\). (a–c) Stable CFE point \(\vartheta =10.48,\beta =0.00714, {\mu }_{3}=0.0004,{\alpha }_{1}=0.42386, d=0.7 , {\psi }_{1}=0.475,{\gamma }_{3}=0.0135\).

Numerical simulation for model (1) of40 by using NSFD scheme with \(\left(\mathbf{a}\right) h =1,\left(\mathbf{b}\right) h = 10,\left(\mathbf{c}\right) h=100,\left(\mathbf{d}\right) h=1000\). (a–d) Stable CFE point \(\vartheta =10.48,\beta =0.00714, {\mu }_{3}=0.0004,{\alpha }_{1}=0.42386, d=0.7 , {\psi }_{1}=0.475,{\gamma }_{3}=0.0135\).
We're studying different ways diseases spread to understand them better. In the future, we plan to improve our model by using sensitivity methods along with the NSFD technique to find the best dynamics behavior for the system.
Data availability
The data used to support the finding of this study are included within the article.
References
Khan, A., Alshehri, H. M., Abdeljawad, T., Al-Mdallal, Q. M. & Khan, H. Stability analysis of fractional nabla difference COVID-19 model. Results Phys. 22, 103888 (2021).
Begum, R., Tunç, O., Khan, H., Gulzar, H. & Khan, A. A fractional order Zika virus model with Mittag-Leffler kernel. Chaos, Solitons Fractals 146, 110898 (2021).
Shah, K. et al. Haar wavelet collocation approach for the solution of fractional order COVID-19 model using Caputo derivative. Alex. Eng. J. 59(5), 3221–3231 (2020).
Bedi, P., Kumar, A., Abdeljawad, T., Khan, Z. A. & Khan, A. Existence and approximate controllability of Hilfer fractional evolution equations with almost sectorial operators. Adv. Difference Equ. 2020(1), 1–15 (2020).
Soresina, A. et al. Two X-linked agammaglobulinemia patients develop pneumonia as COVID-19 manifestation but recover. Pediatr. Allergy Immunol. 31(5), 565–569 (2020).
Liu, C., Zhou, Q., Li, Y., Garner, L. V., Watkins, S. P., Carter, L. J., & Albaiu, D. Research and development on therapeutic agents and vaccines for COVID-19 and related human coronavirus diseases (2020).
Bootsma, M. C. & Ferguson, N. M. The effect of public health measures on the 1918 influenza pandemic in US cities. Proc. Natl. Acad. Sci. 104(18), 7588–7593 (2007).
Ferguson, N. M., Laydon, D., Nedjati-Gilani, G., Imai, N., Ainslie, K., Baguelin, M. and Ghani, A. C. Impact of non-pharmaceutical interventions (NPIs) to reduce COVID-19 mortality and healthcare demand (2020).
Van Doremalen, N., Letko, M., Fischer, R. J., Bushmaker, T. Yinda, C. K., Schulz, J. and Munster, V. J. Surface-aerosol stability and pathogenicity of diverse MERS-CoV strains from 2012–2018 (2021).
Xu, R. et al. Saliva: potential diagnostic value and transmission of 2019-n CoV. Int. J. Oral Sci. 12(1), 1–6 (2020).
Sun, K. et al. Flexible silver nanowire/carbon fiber felt meta composites with weakly negative permittivity behavior. Phys. Chem. Chem. Phys. 22(9), 5114–5122 (2020).
Huang, C. et al. Clinical features of patients infected with 2019 novel coronavirus in Wuhan, China. The lancet 395(10223), 497–506 (2020).
Linton, N. M. et al. Incubation period and other epidemiological characteristics of 2019 novel coronavirus infections with right truncation: A statistical analysis of publicly available case data. J. Clin. Med. 9, 538 (2020).
Liu, Y. et al. Association between age and clinical characteristics and outcomes of Covid-19. Eur. Respir. J. 55, 5 (2020).
Adnan Thirthar, A. Stability and bifurcation of an sis epidemic model with saturated incidence rate and treatment function. Iran. J. Math. Sci. Inf. 15(2), 129–146 (2020).
Thirthar, A. A., Abboubakar, H., Khan, A. & Abdeljawad, T. Mathematical modeling of the COVID-19 epidemic with fear impact. AIMS Math 8(3), 6447–6465 (2023).
Arfan, M. et al. On nonlinear dynamics of COVID-19 disease model corresponding to nonsingular fractional order derivative. Med. Biol. Eng. Comput. 60(11), 3169–3185 (2022).
Thirthar, A. A., Naji, R. K., Bozkurt, F. & Yousef, A. Modeling and analysis of an SI1I2R epidemic model with nonlinear incidence and general recovery functions of I1. Chaos, Solitons & Fractals 145, 110746 (2021).
Antczak, T. & Arana-Jimenez, M. Optimality and duality results for new classes of nonconvex quasidifferentiable vector optimization problems. Appl. Comput. Math. 21(1), 21–34 (2022).
Yang, X. et al. Clinical course and outcomes of critically ill patients with sars-cov-2 pneumonia in Wuhan, China: A single-centered, retrospective, observational study. Lancet Respir. Med. 8, 475–481 (2020).
Khankishiyev, Z. F. Solution of one problem for a loaded differential equation by the method of finite differences. Appl. Comput. Math. 21(2), 147–157 (2022).
Hamidov, S. I. Optimal trajectories in reproduction models of economic dynamics. TWMS J. Pure Appl. Math. 13(1), 16–24 (2022).
Du, R.-H. et al. Predictors of mortality for patients with Covid-19 pneumonia caused by sars-cov-2: A prospective cohort study. Eur. Respir. J. 55, 6 (2020).
Chikina, M. & Pegden, W. Modeling strict age-targeted mitigation strategies for Covid-19. PLoS ONE 15, e0236237 (2020).
Yu, X., Duan, J., Jiang, Y. & Zhang, H. Distinctive trajectories of the Covid-19 epidemic by age and gender: A retrospective modeling of the epidemic in south korea. Int. J. Infect. Dis. 98, 200–205 (2020).
Srivastava, H. M. et al. Supply chain inventory model for deteriorating products with maximum lifetime under trade-credit financing. TWMS J. Pure Appl. Math. 13(1), 53–71 (2022).
Antczak, T. & Arana-Jimenez, M. Optimality and duality results for new classes of nonconvex quasidifferentiable vector optimization problems. Appl. Comput. Math. 21(1), 21–34 (2022).
Hamidoğlu A, Taghiyev M, Weber G. On construction of pursuit-evasion games in discrete control models. Appl. Comput. Math. 21(1) (2022).
He, C. H. et al. A fractal model for the internal temperature response of a porous concrete. Appl. Comput. Math. 21(1), 71–77 (2022).
Iskandarov, S. & Komartsova, E. On the influence of integral perturbations on the boundedness of solutions of a fourth-order linear differential equation. TWMS J. Pure Appl. Math. 1(13), 3–9 (2022).
Akbay, A., Turgay, N. & Ergüt, M. On space-like generalized constant ratio Hypersufaces in Minkowski spaces. Twms J. Pure Appl. Math. 13(1), 25–37 (2022).
Kalsoom, H. U. M. A. I. R. A., Ali, M. A., Abbas, M. U. J. A. H. I. D., Budak, H. Ü. S. E. Y. I. N. & Murtaza, G. H. U. L. A. M. Generalized quantum Montgomery identity and Ostrowski type inequalities for preinvex functions. TWMS J. Pure Appl. Math. 13(1), 72–90 (2022).
Peter, O. J., Qureshi, S., Yusuf, A., Al-Shomrani, M. & Idowu, A. A. A new mathematical model of COVID-19 using real data from Pakistan. Results Phys. 24, 104098 (2021).
Li, S., Hussain, A., Khan, I. U., El Koufi, A., and Mehmood, A. The continuous and discrete stability characterization of Hepatitis B deterministic model. Math. Probl. Eng. (2022).
Chen, S., Small, M. & Fu, X. Global stability of epidemic models with imperfect vaccination and quarantine on scale-free networks. IEEE Trans. Network Sci. Eng. 7(3), 1583–1596 (2019).
Jamal, A., Ullah, A., Ahmad, S., Sarwar, S. & Shokri, A. A survey of (2+ 1)-dimensional KdV–mKdV equation using nonlocal Caputo fractal–fractional operator. Results Phys. 46, 106294 (2023).
Li, F., Meng, X., and Wang, X. Analysis and numerical simulations of a stochastic SEIQR epidemic system with quarantine-adjusted incidence and imperfect vaccination. Comput. Math. Methods Med. (2018).
Xu, H. Y., Liu, X. L. & Xu, Y. H. On solutions for several systems of complex nonlinear partial differential equations with two variables. Anal. Math. Phys. 13(47), 1–24 (2023).
Xu, H. Y. & Xu, L. Transcendental entire solutions for several quadratic binomial and trinomial PDEs with constant coefficients. Anal. Math. Phys. 12, 64 (2022).
Qi, F. Necessary and sufficient conditions for a difference defined by four derivatives of a function containing trigamma function to be completely monotonic. Appl. Comput. Math. 21(1), 61–70 (2022).
Akram, G., Elahi, Z. & Siddiqi, S. S. Use of Laguerre polynomials for solving system of linear differential equations. Appl. Comput. Math. 21(2), 137–146 (2022).
Juraev, D. A., Shokri, A. & Marian, D. Solution of the ill-posed Cauchy problem for systems of elliptic type of the first order. Fract. Fract. 6(7), 358 (2022).
Lu, H., Ding, Y., Gong, S. & Wang, S. Mathematical modeling and dynamic analysis of SIQR model with delay for pandemic COVID-19. Math. Biosci. Eng 18(4), 3197–3214 (2021).
Arino, J., & Driessche, P. V. D. The basic reproduction number in a multi-city compartmental epidemic model. In Positive Systems (pp. 135–142). Springer, Berlin, Heidelberg (2003).
Mickens, R. E. Nonstandard finite difference models of differential equations. World scientific (1994).
Mickens, R. E. Dynamic consistency: a fundamental principle for constructing nonstandard finite difference schemes for differential equations. J. Differ. Equ. Appl. 11(7), 645–653 (2005).
Elaydi, S. An introduction to difference Equations 3rd edition; Springer: New York, NY, USA (2005).
Brauer, F., Castillo-Chavez, C., and Castillo-Chavez, C. Mathematical models in population biology and epidemiology (Vol. 2, p. 508). New York: Springer (2012).
Acknowledgements
It is our duty to express our gratitude to the esteemed referee team who read this article patiently and carefully and helped us to complete this article with their appropriate and intelligent comments.
Author information
Authors and Affiliations
Contributions
All authors planned the scheme, developed the mathematical modeling, and examined the theory validation. The manuscript was written through the contribution by all authors. All authors discussed the results, reviewed, and approved the final version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Xiao, N., Xu, H., Morani, A.H. et al. Exploring local and global stability of COVID-19 through numerical schemes. Sci Rep 14, 7960 (2024). https://doi.org/10.1038/s41598-024-56938-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-56938-x
- Springer Nature Limited