
Abstract
Due to the proliferation of contemporary computer-integrated systems and communication networks, there is more concern than ever regarding privacy, given the potential for sensitive data exploitation. A recent cyber-security research trend is to focus on security principles and develop the foundations for designing safety-critical systems. In this work, we investigated the problem of verifying current-state opacity in discrete event systems using labeled Petri nets. A system is current-state opaque provided that the current-state estimate cannot be revealed as a subset of secret states. We introduced a new sub-model of the system, named an observer net. The observer net have the same structure as the plant, but it is distinguished by the use of colored markers as well as simultaneous and recursive transition enabling and firing, which offer an efficient state estimation. We considered two settings of the proposed approach: an on-line setting, in which a current-state opacity algorithm is proposed. The algorithm waits for the occurrence of an observable event and determines if the current observation of a plant reveals the secret behaviour, as well as, an off-line setting, where the verification problem is solved based on a state estimator called a colored estimator. In this context, necessary and sufficient conditions for verifying opacity are developed with illustrative examples to demonstrate the presented approach.
Similar content being viewed by others

Introduction
Cybersecurity is needed as an extension of reliability to protect systems from errors or damage caused by cyberattacks. Nowadays, ensuring the privacy of information flows1,2 has become an increasingly significant concern3,4,5,6,7. Formalizing security principles and developing theoretical basics for secure systems design is a current cybersecurity research trend. Specifically, in discrete event systems (DESs), the problem of whether privacy is disclosed in information flows can be addressed in terms of a confidentiality property called opacity. Opacity characterizes whether the secret behaviour of a considered system is revealed to an external observer or intruder. The term opacity is first used to describe cryptographic protocols in8 and then expanded to the DES domain through the work of Bryans et al.9, where it formally expresses the absence of information flow, i.e., the intruder’s inability to make any useful inference about the secret information in systems modeled as Petri nets (PNs). In DESs, the secret can be represented by the states or language of a system. Accordingly, opacity properties are generally classified into two types: state-based opacity (SBO)9,10,11 and language-based opacity (LBO)12,13.
The computer security community has recently looked into several aspects of opacity. A brief overview of some of the recent studies is provided in what follows. In14, Yang et al. propose new types of opacity in networked DESs that are modeled as finite state automata (FSA) by taking into account the communication delays and losses in the observation channel. Opacity was also investigated in stochastic DESs modeled as probabilistic automata15 and for fuzzy DESs modeled as fuzzy automata16,17, which extends the relevant findings of the opacity theory for classical DESs. It should be noted that when a system is evaluated to be non-opaque, opacity enforcement becomes crucial. In this context, opacity enforcement has been considered either by restricting the system behavior using supervisory control18,19 or by changing the information flow using insertion function20,21.
This paper aims to verify the property of current-state-based opacity (CSO) for DESs that can be described by bounded PNs. It is assumed that an intruder completely knows the system structure, but can partially observe the occurrence of some events only. Therefore, he/she tries to estimate the system states based on its observations to infer the secret behaviour. The system considered in this work is represented by labeled PNs (LPNs) with a static observation function22,23. A subset of the reachable markings represents the secret. A system is CSO if an intruder cannot unambiguously discover the secret states from its observations.
The problem of CSO verification is shown to be decidable for bounded labeled Petri nets24,25. However, Tong et al.26 recently demonstrate that, in general, the opacity verification problem is undecidable if the PN system is unbounded. For this reason, our work concentrates on bounded LPN by proposing an efficient approach that provides definite answers to the CSO problem.
Many of the existing studies on DESs pay particular attention to the opacity problem. Various methods have investigated the issue of state-based opacity verification in DESs27,28. In10, the authors report a necessary and sufficient criterion using a non-deterministic finite automaton (NFA) by building an observer, i.e., transforming an NFA into a deterministic finite automaton (DFA) with a complexity of \({\mathcal {O}}(2^n)\)29, where n is the number of states in the NFA. However, the verification of CSO is proved to be PSPACE-complete with respect to n30,31,32. By using a compact representation of a reachability graph (RG) called a basis RG (BRG), the work in27 presents a necessary and sufficient condition for CSO. Note that the concept of BRGs have been proposed in33,34,35,36. The benefit of this method consists in avoiding the exhaustive enumeration of all reachable markings. However, the computational effort is still considerably heavy, and a large amount of memory is required.
Another interesting work is recently presented in28, where the authors discuss CSO modeling and verification in DESs modeled by partially observed PNs (POPNs)37. They propose a discernible reachability graph (DRG) to compute the state estimation of a POPN system and check if the opacity condition holds. Its limitation lies in the fact that the DRG alone does not provide a necessary and sufficient CSO verification condition. Consequently, the authors resort to integer linear programming (ILP) to solve this problem. In the same context, online verification algorithms for current38 and initial39 state opacity have been proposed by Cong et al. in LPNs by assuming the acyclicity of the observable and unobservable subnets. These algorithms detect the occurrence of events and decide whether the transition (event) sequence observed so far is opaque or not. This decision is based on solving a group of ILPs. The works in38,39 are restricted to secret markings defined by generalized mutual exclusion constraints (GMECs)40.
On the other hand, LBO has been formalized in the existing studies in various ways. It is first proposed in the framework of NFA41,42. The secret for the LBO problem is described by a sub-language of the DES. A system is said to be of LBO with respect to a secret language if an intruder cannot reveal that any generated event sequence is entirely within the secret. In43, the authors characterize and introduce two types of opacity on the basis of languages, namely strong opacity and weak opacity. In12, the authors propose approaches to ensure language-based opacity for bounded LPNs based on finite-time automata, called a verifier, by assuming that an intruder captures observable transitions only. For LBO verification using ILP, the work in44 formulates a necessary and sufficient condition. Jacob et al. provide a thorough overview of opacity for DESs31. A historical perspective on the development of the opacity theory (and diagnosability theory) in DESs can be found in45.
This work investigates CSO using a new model called observer net. The main contributions of this work can be summarized below:
-
1.
A new sub-model of the system called an observer net is developed based on the plant structure. It is characterised by the new concepts of simultaneous and recursive transition enabling and firing allowing a rapid computation of the reachable markings.
-
2.
We proposed an on-line algorithm for CSO verification in an LPN system. It provides the state estimation and the opacity decision of the word observed so far by waiting the occurrence of an event and then determines if the last observed event reveals the secret behaviour or not.
-
3.
The proposed observer net model provides efficient usage of space, while improving runtime performance. We managed to lower the space complexity by avoiding the exhaustive computation of all reachable markings, and also lower the time complexity by merging the computation phases using the new concepts of simultaneous and recursive transition enabling and firing.
-
4.
When an off-line opacity verification is desired, we constructed a state estimator called a colored estimator, where each of its states corresponds to a set of the consistent markings.
The remainder of this paper is structured as follows. In section “Current-state opacity”, we state the problem of CSO and present its definitions. Section “Observer net” introduces the concept of the observer net and specifies its dynamics. In section “Verification of current-state opacity”, we verify current-state opacity using on-line and off-line algorithms. Section “Computational complexity and comparison” investigates the proposed approach’s effectiveness by giving a comparative study with related works. In section “Conclusions”, concluding remarks and possible future directions are discussed.
Current-state opacity
We intend to define the notion of opacity in a DES modeled as a PN. In a system modeled with an LPN \(G=(N, M_{0}, E, \ell )\), a secret S is a subset of the reachability set composed of some particular markings, called secret markings. Current-state opacity claims that, for every secret state reachable from the initial state by firing a transition sequence, a non-secret state reachable by firing another transition sequence must exist, and both sequences have the same observation from the intruder perspective. Moreover, it is assumed that an intruder knows the system’s structure, but he/she can get a partial observation of the event occurrences only. Necessary preliminaries are provided in the appendix of this study46.
Definition 1
27 Given an LPN \(G=(N, M_{0}, E, \ell )\) and a secret \(S \subseteq R(N,M_{0})\), we say that observation \(w \in {\mathcal {L}}(N,M_{0})\) is \(\text {current-state opaque}\) wrt S if \({\mathcal {C}}(w) \nsubseteq S\) holds.
Definition 2
27 We say that \(G = (N,M_{0}, E, \ell )\) is \(\text {current-state opaque}\) wrt \(S \subseteq R(N,M_{0})\) if for any \(w \in {\mathcal {L}}(N,M_{0})\), we have \({\mathcal {C}}(w) \nsubseteq S\).
Namely, for any possible \(w \in {\mathcal {L}}(N, M_0)\), an intruder is unable to determine if the current state lies within S. Now, we define the non-current-state opaque observation and system as follows.
Definition 3
39 Given \(G = (N,M_{0}, E, \ell )\) as an LPN system and \(S \subseteq R(N,M_{0})\) as a secret, if \({\mathcal {C}}(w) \subseteq S\) holds, then \(w \in {\mathcal {L}}(N, M_{0})\) is non-current-state opaque wrt S.
For a non-CSO observation w, an intruder can deduce that any marking consistent with w is within S, i.e., for any \(M \in {\mathcal {C}}(w)\), \(M \in S\). Accordingly, a non-current-state opaque system is defined as follows.
Definition 4
39 We say that an LPN \(G = (N, M_{0}, E, \ell )\) is \(\text { non- current-state}\) \(\text {opaque}\) wrt a secret \(S \subseteq R(N,M_{0})\) if there is at least an observation \(w \in {\mathcal {L}}(N, M_{0})\) with \({\mathcal {C}}(w) \subseteq S\).
Based on Definition 4, to ensure the CSO of a bounded LPN system, we need to check whether there is at least a \(w \in {\mathcal {L}}(N,M_0)\) such that \({\mathcal {C}}(w) \subseteq S\). To answer this question, one must perform an exhaustive enumeration of all reachable markings, i.e., computing \({\mathcal {C}}(w)\) for all \(w \in {\mathcal {L}}(N,M_0)\), and then build a reachability graph observer, i.e., a DFA equivalent to the RG, using the standard determinization procedure47, whose computational complexity is \({\mathcal {O}}(2^{|X|})\) with X being the set of states in the RG31,47,48. The reachability graph observer provides the state estimation after the occurrence of an observation sequence as shown in the following example.

An LPN with \(M_{0}=2p_1\).

RG of the LPN in Fig. 1.

Observer of the RG in Fig. 2.
Example 1
We consider the plant G in Fig. 1 with initial marking \(M_0 = 2p_1\) and \(E = \{a, b\}\). The sets of unobservable and observable transitions are \(T_{uo}=\{t_{2},t_{3},t_{4},t_{7}\}\) and \(T_{o}=\{t_{1},t_{5},t_{6},t_{8}\}\), respectively. The RG and its corresponding observer are given in Figs. 2 and 3, respectively. Let \(S = \{M_{8},M_{13},M_{14},M_{18},M_{20}\}\) be a secret. For observation \(w=aba\), we have \({\mathcal {C}}(w) =\{ M_8,M_{13},M_{14}, M_{18},M_{20}\} \subseteq S\). Then, based on Definition 4, the LPN system G is non-CSO with respect to S.
Observer net
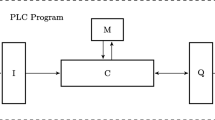
This section defines the concept of an observer net. For a plant G, an observer net is a labeled Petri net that has the same structure of G (in terms of places, transitions, and arcs) but has a different behaviour. Specifically, an observer net allows the simultaneous presence of several markings, characterised with distinct colors, in order to determine the states the plant can be in upon observation of an event. In Fig. 4, we summarize the interaction between a plant G and its associated observer net \(\Phi\). Upon the occurrence of an event, the observer net \(\Phi\) determines the system state estimation. Specifically, it finds the possible marking at which a plant may lies, i.e., all the states consistent with the sequence of events observed thus far.

Observer net.
The primary challenges in this work lie in defining how the observer net is modeled, graphically represented, and how it operates. Although the observer net is modeled as a labeled Petri net graphically, its state transition function and states differ from regular Petri nets. In what follows, a formal definition of the observer net, and its construction algorithm, as well as its dynamics, are presented.
Note that, in the following, the word “marking” refers to a marking of the plant and the word “state” refers to a marking of the observer net.
Definition 5
For an LPN \(G = (N, M_{0}, E, \ell )\), we define its associated observer net as a six-tuple \(\Phi =(N, M_{\Phi ,0}\), E, \(\ell\), \({\mathcal {C}}_c\), \({\mathcal {C}}_M)\), where
-
1.
\({\mathcal {C}}_c\) is a non-empty and finite set of colors.
-
2.
\({\mathcal {C}}_M:\) \(R(N,M_{0}) \rightarrow {\mathcal {C}}_c\) is a function for associating each marking \(M \in R(N,M_{0})\) with a color \(c \in {\mathcal {C}}_c\).
-
3.
\(M_{\Phi ,0}=\{(M,c)| M \in {\mathcal {U}}(M_0) \text { and } {\mathcal {C}}_M(M)=c\in {\mathcal {C}}_c\}\) gives the initial state of the observer net.
The structure of \(\Phi\) is same as that of the plant G. Its initial state \(M_{\Phi ,0}\) consists of colored markings (M, c), where \(M \in {\mathcal {U}}(M_{0})\) and c is generated by the function \({\mathcal {C}}_M\). A state in \(\Phi\) is a set of colored markings (M, c), denoted as \(M_{\Phi }\), specifying the system state estimation after observing an event. We need to make sure that \({\mathcal {C}}_M\) associates distinct colors to the markings belonging to \(M_{\Phi }\) to tell the distinction between them (due to the simultaneous presence of different colored markings in the observer net, it can be thought of as being a special class of colored Petri net).

Algorithm 1 takes an LPN \(G = (N,M_{0}, E, \ell )\) as input and outputs its associated observer net \(\Phi = (N,\) \(M_{\Phi ,0},\) \(E, \ell ,\) \({\mathcal {C}}_c, {\mathcal {C}}_M)\). In the first step, we build the structure of the observer net \(\Phi\) by cloning the plant G, i.e., G and \(\Phi\) have the same structure \(N=(P, T, Pre, Post)\), and the same labeling function \(\ell\). Then step 2 defines the initial state \(M_{\Phi ,0}\) of \(\Phi\) by calculating the unobservable reach of the initial marking \(M_0\) of G, and assigns a distinct color \(c \in {\mathcal {C}}_c\) to each marking using the color function \({\mathcal {C}}_M\). This step runs iteratively until all the unobservable reaches of \(M_0\) are colored. The computational complexity of Algorithm 1 is mainly dependent on the number of markings in the unobservable reach of \(M_0\).

Observer net \(\Phi\) with an initial state \(M_{\Phi ,0}\).
Example 2
Let us consider the LPN system G in Fig. 1. According to Algorithm 1, the observer net \(\Phi\) is shown in Fig. 5 it has the same structure (states and transitions) as plant G. The initial state of \(\Phi\) is retrieved from the initial marking of G. We have \(M_0 = 2p_1\) and \({\mathcal {U}}(M_0) = \{ M_0,M_2,M_5,M_7,M_{12},M_{17}\}\); based on Definition 5. the initial state of the observer net is given by:
The initial state of the observer net is composed of six colored markings as shown in Fig. 6.

The initial state \(M_{\Phi ,0}\) of the observer net.
The dynamic behaviour of a PN is characterized by the transition firing rules together with the distribution of tokens in places. In the following, we introduce the rules that govern the flows of tokens in the observer net.
Given an observer net \(\Phi =(N,M_{\Phi ,0},\) E, \(\ell\), \({\mathcal {C}}_c\), \({\mathcal {C}}_M)\) and a state \(M_{\Phi }\), a transition \(t \in T_{o}\) is enabled at \(M_{\Phi }\) if there exists \((M, c)\in M_\Phi\) such that \(M\ge Pre(t,\cdot )\) holds, and we denote it by \((M, c)[t\rangle\). The set of enabled transitions at (M, c) with label e is defined as
and the set of all the enabled transitions at \(M_{\Phi }\) with label e is defined as
Example 3
Consider the LPN G in Fig. 1, its corresponding observer net \(\Phi\) is visualized in Fig. 5 with initial state is \(M_{\Phi ,0}\) \(= \{(M_0,\bullet ),\) \((M_2,\blacksquare ),\) \((M_5,\bigstar ),\) \((M_7,\triangle ),\) \((M_{12},\diamond ),\) \((M_{17},\square )\}\). Based on Equation (1), we have:
\(\Sigma ((M_0,\bullet ), a) =\{t_1\},\) \(\Sigma ((M_2,\blacksquare ),a) =\{t_1\},\) \(\Sigma ((M_5,\bigstar ), a) =\{t_1,t_6\},\) \(\Sigma ((M_7,\triangle ), a) =\emptyset ,\) \(\Sigma ((M_{12},\diamond ), a) =\{t_6\},\) and \(\Sigma ((M_{17},\square ), a) =\{t_6\}\).
Based on Equation (2), the set of enabled transitions at \(M_{\Phi ,0}\) with label a is given by:
Firing a transition \(t \in \Sigma ((M,c), e)\) at \((M,c)\in M_\Phi\) yields a new colored marking \((M',c')\), denoted as \((M, c)[t\rangle (M',c')\). We define by
the set of reachable colored markings if all enabled transitions in \(\Sigma ((M,c), e)\) are fired, and by
the set of all reachable colored markings if the enabled transitions at state \(M_{\Phi }\) with label e are fired.
Note that, if a transition with label e fires at a colored marking (M, c), all the enabled transitions with label e at (M, c) fire concurrently. Thus, the semantics of an observer net is different from the classical Petri nets.
The following rules define the dynamics of an observer net.
-
Rule 1: Simultaneous enabling A set of k transitions \(\{t\in T_{o}\mid \ell (t)=e\}\) are simultaneously enabled at a colored marking (M, c) if any \(t\in {T_{o}}\) with \(\ell (t)=e\) is enabled at (M, c).
-
Rule 2: Simultaneous firing Simultaneously firing k enabled transitions \(t_1\), \(t_2\), \(\ldots\), \(t_k \in {T_{o}}\) with label e at (M, c) yields k colored markings, as defined by \(\eta ((M,c),e)\) in (3).
-
Rule 3: Recursive enabling A \(t\in {T_{o}}\) with \(\ell (t)=e\) is said to be recursively enabled at a state \(M_\Phi\) if there exist k colored markings \(\{(M_1,c_1),\) \((M_2,c_2)\), \(\ldots , (M_k,c_k)\}\) in \(M_\Phi\), for all \(i\in \{1,2,\ldots ,k\}\), \((M_i,c_i)\) enables t.
-
Rule 4: Recursive firing The firing of a recursively enabled transition \(t \in {T_{o}}\) with label e at \(M_\Phi\) is defined by firing t at \((M_1,c_1)\), \((M_2,c_2)\), \(\ldots , (M_k,c_k)\), respectively. Equivalently, t fires k times, yielding k colored markings as defined by \(\eta (M_{\Phi },e)\) in (4).
-
Rule 5: Irrelevant markings elimination If a colored marking \((M,c) \in M_\Phi\) does not enable any transition \(t \in {T_{o}}\) with label e, i.e., \(\Sigma ((M,c),e)=\emptyset\), then, for (M, c), let \(M(p)=0\) for all \(p\in P\).
The observer net dynamic rules allow us to benefit from the simultaneous and recursive firing mechanism, which ensures a rapid computation of markings and guarantees a significant decrease in the time complexity of the proposed method, as shown in the following sections.
Examine the LPN systems shown in Fig. 7 that illustrates the dynamics of the observer net by two different scenarios. In Fig. 7a, the initial state is given as \(M_{\Phi ,0}=\{(p_1, \bullet )\}\), where \(E=\{a\}\). Transitions \(t_1\) and \(t_2\) have the same label a.

Observer net \(\Phi\) dynamics.
Initially, based on Rule 1, transitions \(t_1\) and \(t_2\) are simultaneously enabled wrt color \(\bullet\) at \(M_{\Phi ,0}\) since \(\Sigma ((p_1, \bullet ), a)=\{t_1,t_2\}\).
Then, based on Rule 2, the observer net simultaneously fires \(t_1\) and \(t_2\) since both are simultaneously enabled. The token of \((p_1, \bullet )\) is consumed by the execution of firing both transitions \(t_1\) and \(t_2\), which yields to a new reachable state composed of two colored markings \(M_{\Phi ,1}=\{(p_2,\blacksquare ),(p_3,\bigstar )\}\).
In Fig. 7b, the initial state is given as \(M_{\Phi ,0}=\) \(\{(2p_1+p_2, \bullet ),\) \((p_1+p_2,\blacksquare ),\) \((p_2,\bigstar )\}\), where \(E=\{a\}\).
Based on Rule 3, transition \(t_1\) is recursively enabled wrt \(\bullet\) and \(\blacksquare\) at \(M_{\Phi ,0}\) since we have \(\Sigma ((2p_1+p_2, \bullet ), a)=\{t_1\}\) and \(\Sigma ((p_1+p_2, \blacksquare ), a)=\{t_1\}\).
Then, based on Rule 4, the observer net recursively fires \(t_1\), which yields to a new reachable state composed of two colored markings \(M_{\Phi ,1}=\{(p_1+p_3+p_4,\odot ),(p_3+p_4,\boxdot )\}\).
According to Rule 5, the colored marking \((p_2,\bigstar )\) does not enable transition \(t_1\). Thus the token with color type \(\bigstar\) is removed from \(p_2\), i.e., colored marking \((p_2, \bigstar )\) is discarded.
Example 4
The observer net \(\Phi\) of the LPN G in Fig. 1, is portrayed in Fig. 5. The initial state of the observer net is \(M_{\Phi ,0} =\) \(\{(M_0,\bullet ),\) \((M_2,\blacksquare ),\) \((M_5,\bigstar ),\) \((M_7,\triangle ),\) \((M_{12},\diamond ),\) \((M_{17},\square )\}\). Figure 8 shows the set of markings reachable from \(M_{\Phi ,0}\) by firing transitions labeled with a, which is denoted as \(\eta (M_{\Phi ,0}, a)\). Based on Rules 3 and 4, transition \(t_1\) is recursively enabled at \((M_0,\bullet ), (M_2,\blacksquare )\), and \((M_5,\bigstar )\). In this case, the recursive firing of \(t_1\) yields new colored markings \((M_1, {\mathcal {C}}_M(M_1))\), \((M_6,{\mathcal {C}}_M(M_6))\), \((M_9,{\mathcal {C}}_M(M_9))\). Similarly, transition \(t_6\) is recursively enabled at \((M_5,\bigstar )\), \((M_{12},\diamond )\) and \((M_{17},\square )\). When firing, markings \((M_{10}, {\mathcal {C}}_M(M_{10}))\), \((M_{16}, {\mathcal {C}}_M(M_{16}))\), and \((M_{19}, {\mathcal {C}}_M(M_{19}))\) are reached. We can also say that \(t_1\) and \(t_6\) are enabled and fired simultaneously following Rules 1 and 2. Besides, we notice that the colored marking \((M_7, \triangle )\) does not enable any observable transition, i.e., \(\Sigma ((M_7, \triangle ),e)=\emptyset\) for all \(e \in E\), therefore tokens of \((M_7, \triangle )\) can be removed from the observer net based on Rule 5.

The set of markings reachable from \(M_{\Phi ,0}\) by firing transitions with label a.
We define the unobservable reach of a state \(M_\Phi\) as
A state transition function of \(\Phi\) is given by : \(\delta :~2^{M_{\Phi }}\times E \rightarrow 2^{M_{\Phi }}\) such that:
We call the set of states reachable from \(M_{\Phi ,0}\) the reachable state set of \((N, M_{\Phi ,0})\), denoted by \(R(N,M_{\Phi ,0})\).
Example 5
Examine the LPN G in Fig. 1 and its associated observer net \(\Phi\) in Fig. 5. The initial state of \(\Phi\) is \(M_{\Phi ,0}=\) \(\{(M_0,\bullet ),\) \((M_2,\blacksquare ),\) \((M_5,\bigstar ),\) \((M_7,\triangle ),\) \((M_{12},\diamond ),\) \((M_{17},\square )\}\). The state estimation after observing event a from \(M_{\Phi ,0}\) is given by the state transition function \(\delta\) as follows:
The transition firing steps from \(M_{\Phi ,0}\) that enable the occurrence of event a are illustrated in Fig. 9.

State transition from \(M_{\Phi ,0}\).
We define the operator \(\llbracket . \rrbracket\) on the states of an observer net by \(\llbracket M_{\Phi } \rrbracket =\{M \in {\mathbb {N}}^m| (M,c) \in M_{\Phi }\}\). As usual, the state transition function of \(\Phi\) can be naturally extended to be \(\delta :~2^{M_{\Phi }}\times E^* \rightarrow 2^{M_{\Phi }}\).
Proposition 1
Given an LPN \(G = (N,M_{0}, E, \ell )\) and its observer net \(\Phi =(N,M_{\Phi ,0}, E, \ell , {\mathcal {C}}_c, {\mathcal {C}}_M)\), we have \({\mathcal {C}}(w)= \llbracket \delta (M_{\Phi ,0}, w) \rrbracket\) for all \(w \in {\mathcal {L}}(N,M_0)\).
Proof
We do so by mathematical induction on the length of the observation sequence w.
(Basis case) For \(w=\varepsilon\), we have \({\mathcal {C}}(\varepsilon )={\mathcal {U}}(M_0)\) and \(\delta (M_{\Phi ,0},\varepsilon )=M_{\Phi ,0}\). Since \(\llbracket M_{\Phi ,0}\rrbracket = {\mathcal {U}}(M_0)={\mathcal {C}}(\varepsilon )\), then the result is clearly true.
(Inductive case) Assume that it is true for w. Then, we prove that it also holds for \(w'= we\), where \(e\in E\).
-
1.
We have \({\mathcal {C}}(we) = \{M\in {\mathbb {N}}^m|\) \(M''\in {\mathcal {C}}(w), t \in T_o: M''[t\rangle M', M \in {\mathcal {U}}(M') \text { and } \ell (t)=e\}\).
-
2.
By \(\delta (M_{\Phi ,0}, we) = \delta (\delta (M_{\Phi ,0}, w), e)\), let \(\delta (M_{\Phi ,0}, w)=M'_{\Phi }\). Then, it holds
$$\delta (M_{\Phi ,0}, we) = \delta (M'_{\Phi }, e)$$.
-
3.
Based on (6), it holds
$$\delta (M'_{\Phi }, e) = {\mathcal {U}}(\eta (M'_{\Phi }, e))$$.
-
4.
Based on (5), we have
$$\delta (M'_{\Phi }, e) = \{(M,c)| (M',c') \in \eta (M'_{\Phi }, e): M \in {\mathcal {U}}(M') \text { and } {\mathcal {C}}_M(M')=c'\}$$.
-
5.
Based on (4), one gets
$$\begin{aligned} \delta (M'_{\Phi }, e) &=\{(M,c)| (M'',c'')\in M'_{\Phi }, (M',c')\in \eta ((M'',c''), e): M\in {\mathcal {U}}(M')\text { and }{\mathcal {C}}_M(M')=c\} {\text{ and}}\\ \delta (M'_{\Phi }, e) = \{(M,c)| (M'',c'')\in M'_{\Phi }, t \in \Sigma ((M'',c''), e): M''[t\rangle M', M \in {\mathcal {U}}(M')\text { and } {\mathcal {C}}_M(M')=c\} \end{aligned}$$.
-
6.
Based on (2), it holds
$$\delta (M'_{\Phi }, e) = \{(M,c)|(M'',c'')\in M'_{\Phi }, t\in T_o: M''[t\rangle M', M\in {\mathcal {U}}(M'), {\mathcal {C}}_M(M')=c\text { and }\ell (t)=e\}$$.
Combining (1) and (6), it holds \({\mathcal {C}}(we)= \llbracket \delta (M_{\Phi ,0}, we) \rrbracket\). \(\square\)
Proposition 2
Given an LPN \(G = (N,M_{0}, E, \ell )\), its observer net \(\Phi =(N,M_{\Phi ,0}, E, \ell , {\mathcal {C}}_c, {\mathcal {C}}_M)\) and a secret \(S\subseteq R(N,M_0)\), an observation \(w\in {\mathcal {L}}(N,M_0)\) is non-CSO with respect to S iff \(\llbracket \delta (M_{\Phi ,0}, w)\rrbracket \subseteq S.\)
Proof
(If) Suppose that \(\llbracket \delta (M_{\Phi ,0}, w)\rrbracket \subseteq S\). Based on Proposition 1, we have \(\llbracket \delta (M_{\Phi ,0}, w)\rrbracket = {\mathcal {C}}(w)\). According to Definition 3, \({\mathcal {C}}(w)\subseteq S\) holds and thus w is not-CSO.
(Only if) Let \(w \in {\mathcal {L}}(N, M_0)\) be a non-CSO observation. Based on Definition 3, \({\mathcal {C}}(w)\subseteq S\) holds. Since we have already shown that \(\llbracket \delta (M_{\Phi ,0}, w)\rrbracket = {\mathcal {C}}(w)\) in Proposition 1, then \(\llbracket \delta (M_{\Phi ,0}, w)\rrbracket \subseteq S\) holds. \(\square\)
Proposition 3
Given an LPN \(G = (N,M_{0}, E, \ell )\), its observer net \(\Phi =(N,M_{\Phi ,0}, E, \ell , {\mathcal {C}}_c, {\mathcal {C}}_M)\), and a secret \(S\subseteq R(N,M_0)\), the system G is non-CSO iff at least an observation w exists such that \(\llbracket \delta (M_{\Phi ,0}, w)\rrbracket \subseteq S.\)
Proof
It is inferred directly from Definition 4 and Proposition 2. \(\square\)
Verification of current-state opacity
Next, methods for checking CSO of a DES in on-line and off-line settings are developed using the presented observer net model.
On-line verification
This subsection presents an on-line algorithm devoted to verifying CSO for a given LPN system using an observer net. The observer net \(\Phi\) of the plant G provides a state estimation of G after an observable event occurs, and then verifies the CSO of the system. A discussion on Algorithm 2 is presented next.

Algorithm 2 takes an LPN \(G = (N,M_{0}, E, \ell )\) and a secret S as input. For any current observation w, the algorithm checks its CSO and returns “Yes” if it is opaque; otherwise it returns “No”, meaning that G is non-CSO. The first step builds the observer net \(\Phi\) for G. Then, we initialize the observed word w in the second step. Upon observing the occurrence of any event \(e\in E\), w is updated in Step 3. Then, we check its CSO with respect to S in Step 4. Specifically, when an event e occurs at \(M_{\Phi , i}\), the observer net \(\Phi\) generates a new state \(M_{\Phi ,i+1}\) by simultaneously and recursively firing the enabled transitions with label e. If the set of colored markings in \(M_{\Phi ,i+1}\) is not fully included in the secret S, then, by Proposition 1 and Definition 1, w is CSO. In this case, it executes Step 2 and waits for the occurrence of a new event; otherwise, w is non-CSO, and the opacity property is violated according to Proposition 2. Consequently, based on Proposition 3, G is non-CSO with respect to S.
Algorithm 2 employs the observer net for CSO verification. After an event occurrence, we need to compute the state estimation and then check if the opacity condition holds. Although the algorithm has the exponential space complexity in the worst case, compared with the RG-based verification approach, the main advantage of the on-line verification consists in limiting the analysis to the observed word only instead of exploring the whole language generated by the PN. Besides, the concept of simultaneous and recursive transition firing permits the concurrent execution of transition sequences and results in a significant decrease in the time complexity compared with the classical off-line opacity verification.
Example 6
Apply Algorithm 2 to LPN G shown in Fig. 1 and its associated observer net \(\Phi\) depicted in Fig. 5 whose initial state is \(M_{\Phi ,0} =\) \(\{(M_0,\bullet ),\) \((M_2,\blacksquare ),\) \((M_5,\bigstar ),\) \((M_7,\triangle ),\) \((M_{12},\diamond ),\) \((M_{17},\square )\}\). Given a secret \(S = \{M_{8},M_{13},\) \(M_{14},M_{18},\) \(M_{20}\}\), in the following, we show how Algorithm 2 operates if an observation \(w = aba\) occurs.

By applying Algorithm 2 to plant G, given \(w=a\), we obtain \(\llbracket M_{\Phi ,1} \rrbracket \nsubseteq S\). Then the observation \(w=a\) is CSO with respect to S. After that, w is updated and the observer net \(\Phi\) computes \(M_{\Phi ,2}\) and also we have \(\llbracket M_{\Phi ,2} \rrbracket \nsubseteq S\), indicating that the observation \(w = ab\) is CSO with respect to S. Finally, when event a occurs, the on-line algorithm outputs “No” since \(\llbracket M_{\Phi ,3} \rrbracket \subseteq S\) holds, implying that the observation \(w=aba\) is not opaque with respect to S. According to Proposition 3, the LPN system G is non-CSO wrt S.
If Algorithm 2 never outputs “No”, we infer that all the previously generated observations are CSO. Once Algorithm 2 returns “No”, based on Definition 4, we conclude that G is non-CSO.
Off-line verification
Next, we develop Algorithm 3 to construct the RG of an observer net, called a colored estimator, which can be used for the purpose of an off-line CSO verification.

Let us now clarify how Algorithm 3 works. It takes \(G = (N,M_{0}, E, \ell )\) as input and outputs an automaton \(EST_{\Phi }=\) \((M_{\Phi },E,\) \(\Delta ,M_{\Phi ,0})\), also called an observer or a colored estimator. Initially, we build the observer net \(\Phi\) of G. In the second step, we start constructing the colored estimator by initializing the set \(M_\Phi\) to \({M_{\Phi ,0}}\). Then, for all states \(M_{\Phi , i} \in M_{\Phi }\) that have not yet been explored (i.e., without tags) and all events \(e\in E\), we check if the set of enabled transitions \(\Sigma (M_{\Phi ,i}, e)\) is not empty. Then we move to the next state computation. This procedure runs iteratively until all states in \(M_{\Phi }\) are explored. Each state in \(M_{\Phi }\) represents set of markings consistent with observation. In the worst-case scenario, Algorithm 3 can compute the whole reachability set, suggesting that the space complexity can grow exponentially with the number of tokens at the initial marking. Algorithm 3, on the other hand, exploits the efficient mechanism of the observer net \(\Phi\), namely, simultaneous and recursive transition firing, to generate a straightforward state-estimator without constructing the reachability graph of G. The complexity analysis of the algorithm shows a reduced time complexity compared with other related works. Numerical results for approving this benefit are given in section “Computational complexity and comparison”.
Proposition 4
Given an LPN \(G = (N,M_{0}, E, \ell )\), its observer net \(\Phi =(N,M_{\Phi ,0}, E, \ell , {\mathcal {C}}_c, {\mathcal {C}}_M)\), and a secret \(S\subseteq R(N,M_0)\), iff each state \(M_{\Phi , i}\) of the colored estimator obtained by Algorithm 3 is not fully included in S, i.e., \({\llbracket M_{\Phi ,i}\rrbracket } \nsubseteq S\), then the system is current-state opaque wrt S.
Proof
From Proposition 1, we have \({\mathcal {C}}(w)= \llbracket \delta (M_{\Phi ,0}, w)\rrbracket\). According to Definition 4, if we find at least a state \(M_{\Phi ,i}\) of the colored estimator that satisfies \(\llbracket M_{\Phi ,i} \rrbracket \subseteq {\mathcal {S}}\), then the LPN is non-CSO wrt S; otherwise, the system is CSO. \(\square\)
Example 7
Consider the LPN system G shown in Fig. 1. Its observer net \(\Phi\) is depicted in Fig. 5. The colored estimator of G, generated by Algorithm 3, is shown in Fig. 10. Let \(S = \{M_{8},M_{13},M_{14},M_{18},M_{20}\}\) be a secret. We have \(\llbracket M_{\Phi ,5}\rrbracket \subseteq S\), it follows from Proposition 4 that the LPN is non-CSO with respect to S.

The colored estimator of the observer net.
Computational complexity and comparison
The effectiveness of the approach developed in section “Verification of current-state opacity” is investigated in this section by comparing it with the opacity verification methods recently proposed in the literature to demonstrate their advantages and limitations. It is based on the CPU time in seconds of a desktop computer running under the operating system Windows 10 with I7.4 CPU 3.40 GHz, 32 GB memory.
To do so, we apply the proposed on-line algorithm to a larger version of the LPN in Fig. 1, where the initial marking is \(M_0=15p_1\). Let \(S=\{(4p_3+11p_5), (5p_1+10p_5), (8p_1+3p_5+4p_6), (11p_1+2p_2+2p_3), (13p_1+2p_5), (14p_1+p_5), (15p_1)\}\) be a secret. We use the standard opacity verification approach, which consists of computing the RG and converting the obtained RG into its equivalent DFA. After that, for each state of the observer (i.e., \({\mathcal {C}}(w)\)), we check whether it is fully included in the secret or not. This method takes more than \(1.9 \times 10^4\) seconds and shows that the considered LPN system is non-CSO. This computational overhead is mainly caused by the RG construction and conversion from an NFA to a DFA.
Now, let us implement the on-line algorithm to the same example. Table 1 shows the performance of Algorithm 2. The first column represents the occurrence of an event. The second indicates the time (CPU seconds) required to run an observer net when an event occurs. The third column shows the algorithm’s outputs when an event occurs: “Y” if the observation is CSO and “N” otherwise. From Table 1, it is known that the observed event sequence \(\textit{w = aabaab}\) is non-current-state opaque wrt S. Thus, by Definition 4, the LPN is non-CSO with respect to the given secret. Consequently, due to the short time taken to verify if an observation is CSO or non-CSO, we conclude that the proposed approach can be used for real-time verification. However, this process can be computationally intensive, mainly when an observed word’s length is excessively long.
Examine the LPN system G in Fig. 1 with initial marking \(M_0=kp_1\), where \(k\in {\mathbb {N}}\). Accordingly, we consider a family of nets rather than a single LPN, which is parameterized by the initial marking. Table 2 compares the colored estimator construction using the observer net, i.e., \(EST_{\Phi }\), as shown in Algorithm 3, with the standard approach for observer construction, i.e., DFA construction using the RG of an LPN. The first column shows the value of k. The number of reachable markings is represented in Column 2. Columns 3 and 4 give the number of states of the standard observer and its construction time, respectively. Finally, Columns 5 and 6, respectively, expose the number of states in the observer net and the time of its construction. We use the notation “o.t.” (out of time) to indicate that the computation takes more than three hours to complete. Both methods are computationally demanding in the worst case. However, the observer net’s advantage compared with the standard approach consists of a lower time cost and simplicity of construction.
Table 3 exposes the proposed observer net’s advantages compared with the recent works for the opacity verification problem. For this purpose, we choose three typical methods respectively presented in10,27,28. The second column indicates the application framework. The third column shows the presence of an acyclicity assumption. Column 4 indicates whether the method applies to on-line and off-line settings. Column 5 shows whether we need a conversion from an NFA to a DFA. Finally, Column 6 shows the complexity of each method. Notice that the proposed approach outperforms the related works by getting rid of the acyclicity assumption; in addition, it provides a straightforward strategy for the estimator construction by avoiding the conversion from NFA to DFA. In the worst case, it has an exponential space complexity as it is possible to compute all the reachable markings. However, the observer net has a lower practical time overhead compared with related works due to using the new concepts of simultaneous and recursive transition enabling and firing.
Conclusions
This paper proposes a new PN subclass, called an observer net, to verify the current-state opacity of a DES modeled with an LPN. We define the structure and dynamics (transition enabling and firing rules) for the observer net, which is useful in providing a rapid computation of the set of markings consistent with each observation. Then, we consider on-line and off-line settings for opacity verification. In the on-line setting, the proposed algorithm observes the event occurrence and then decides on-line if the observed word is CSO with respect to the predefined secret. In the off-line setting, we design an algorithm for constructing a colored (state) estimator used for opacity verification rather than the conventional methods based on computing the state estimate (i.e., the set of consistent markings) by constructing a DFA from the reachability graph of a plant.
In the proposed model, every node of the colored estimator corresponds to the consistent markings, making the reachability graph construction unnecessary. Finally, a comparison study is conducted to validate the effectiveness of this approach. Our future work includes exploring other security problems and potential vulnerabilities such as unauthorized access, cyberattacks, intrusion detection, prevention, etc.
Data availability
The datasets generated and analysed during the current study are available in the GitHub repository, https://github.com/LabedAJalil/Observer-net.
References
Lin, F., Wang, L. Y., Chen, W., Wang, W. & Wang, F. Information control in networked discrete event systems and its application to battery management systems. Discrete Event Dyn. Syst. 30, 243–268 (2020).
Khan, M. F., Saleem, K., Alshara, M. A. & Bashir, S. Multilevel information fusion for cryptographic substitution box construction based on inevitable random noise in medical imaging. Sci. Rep. 11, 14282 (2021).
Hadj-Alouane, N. B., Lafrance, S., Lin, F., Mullins, J. & Yeddes, M. M. On the verification of intransitive noninterference in mulitlevel security. IEEE Trans. Syst. Man Cybern. Part B (Cybernetics) 35, 948–958 (2005).
Alur, R., Černỳ, P. & Zdancewic, S. Preserving secrecy under refinement. In Proceedings of International Colloquium on Automata, Languages, and Programming, 107–118 (Springer, 2006).
Schneider, S. & Sidiropoulos, A. CSP and anonymity. In Proceedings of European Symposium on Research in Computer Security, 198–218 (Springer, 1996).
Sabelfeld, A. & Myers, A. C. Language-based information-flow security. IEEE J. Sel. Areas Commun. 21, 5–19 (2003).
Zhuo, M., Liu, L., Zhou, S. & Tian, Z. Survey on security issues of routing and anomaly detection for space information networks. Sci. Rep. 11, 22261 (2021).
Mazaré, L. Using unification for opacity properties. In Proceedings of the Fourth Workshop on Issues in the Theory of Security, 165–176 (WITS, 2004).
Bryans, J. W., Koutny, M. & Ryan, P. Y. Modelling opacity using Petri nets. Electron. Notes Theor. Comput. Sci. 121, 101–115 (2005).
Saboori, A. & Hadjicostis, C. N. Notions of security and opacity in discrete event systems. In Proceedings of the 46th IEEE Conference on Decision and Control, 5056–5061 (IEEE, 2007).
Saboori, A. & Hadjicostis, C. N. Verification of infinite-step opacity and complexity considerations. IEEE Trans. Autom. Control 57, 1265–1269 (2012).
Tong, Y., Ma, Z. Y., Li, Z., Seactzu, C. & Giua, A. Verification of language-based opacity in Petri nets using verifier. In Proceedings of American Control Conference (ACC), 757–763 (IEEE, 2016).
Saadaoui, I., Li, Z., Wu, N. & Khalgui, M. Depth-first search approach for language-based opacity verification using Petri nets. IFAC-PapersOnLine 53, 378–383 (2020).
Yang, J., Deng, W., Qiu, D. & Jiang, C. Opacity of networked discrete event systems. Inf. Sci. 543, 328–344 (2021).
Yin, X., Li, Z., Wang, W. & Li, S. Infinite-step opacity and k-step opacity of stochastic discrete-event systems. Automatica 99, 266–274 (2019).
Deng, W., Qiu, D. & Yang, J. Opacity measures of fuzzy discrete event systems. IEEE Trans. Fuzzy Syst. 29, 2612–2622 (2021).
Deng, W., Qiu, D. & Yang, J. Fuzzy infinite-step opacity measure of discrete event systems and its applications. IEEE Trans. Fuzzy Syst. 30, 885–892 (2022).
Xie, Y., Yin, X. & Li, S. Optimal synthesis of opacity-enforcing supervisors for qualitative and quantitative specifications. arXiv preprint arXiv:2102.01402 (2021).
Chen, Y., Pan, L. & Li, Z. Design of optimal supervisors for the enforcement of nonlinear constraints on Petri nets. In IEEE Transactions on Automation Science and Engineering, 1–13 (2022).
Liu, R., Mei, L. & Lu, J. K-memory-embedded insertion mechanism for opacity enforcement. Syst. Control Lett. 145, 104785 (2020).
Liu, R. & Lu, J. Enforcement for infinite-step opacity and k-step opacity via insertion mechanism. Automatica 140, 110212 (2022).
Bryans, J. W., Koutny, M., Mazaré, L. & Ryan, P. Y. Opacity generalised to transition systems. Int. J. Inf. Secur. 7, 421–435 (2008).
Zhu, G., Li, Z., Wu, N. & Al-Ahmari, A. Fault identification of discrete event systems modeled by Petri nets with unobservable transitions. IEEE Trans. Syst. Man Cybern. Syst. 49, 333–345 (2017).
Dong, Y., Li, Z. & Wu, N. Symbolic verification of current-state opacity of discrete event systems using Petri nets. IEEE Trans. Syst. Man Cybern. Syst. 52, 7628–7641 (2022).
Masopust, T. & Yin, X. Complexity of detectability, opacity and A-diagnosability for modular discrete event systems. Automatica 101, 290–295 (2019).
Tong, Y., Li, Z., Seatzu, C. & Giua, A. Decidability of opacity verification problems in labeled Petri net systems. Automatica 80, 48–53 (2017).
Tong, Y., Li, Z., Seatzu, C. & Giua, A. Verification of state-based opacity using Petri nets. IEEE Trans. Autom. Control 62, 2823–2837 (2017).
Saadaoui, I., Li, Z. & Wu, N. Current-state opacity modelling and verification in partially observed Petri nets. Automatica 116, 108907 (2020).
Wu, Y.-C. & Lafortune, S. Comparative analysis of related notions of opacity in centralized and coordinated architectures. Discrete Event Dyn. Syst. 23, 307–339 (2013).
Saboori, A. & Hadjicostis, C. N. Verification of initial-state opacity in security applications of discrete event systems. Inf. Sci. 246, 115–132 (2013).
Jacob, R., Lesage, J.-J. & Faure, J.-M. Overview of discrete event systems opacity: Models, validation, and quantification. Annu. Rev. Control 41, 135–146 (2016).
Zhang, H., Feng, L., Wu, N. & Li, Z. Integration of learning-based testing and supervisory control for requirements conformance of black-box reactive systems. IEEE Trans. Autom. Sci. Eng. 15, 2–15 (2017).
Cabasino, M. P., Giua, A., Pocci, M. & Seatzu, C. Discrete event diagnosis using labeled Petri nets. An application to manufacturing systems. Control Eng. Pract. 19, 989–1001 (2011).
Cabasino, M. P., Giua, A. & Seatzu, C. Fault detection for discrete event systems using Petri nets with unobservable transitions. Automatica 46, 1531–1539 (2010).
Cabasino, M. P., Giua, A. & Seatzu, C. Diagnosability of discrete-event systems using labeled Petri nets. IEEE Trans. Autom. Sci. Eng. 11, 144–153 (2013).
Ma, Z., Tong, Y., Li, Z. & Giua, A. Basis marking representation of Petri net reachability spaces and its application to the reachability problem. IEEE Trans. Autom. Control 62, 1078–1093 (2016).
Zhu, G., Li, Z. & Wu, N. Model-based fault identification of discrete event systems using partially observed Petri nets. Automatica 96, 201–212 (2018).
Cong, X. Y., Fanti, M. P., Mangini, A. M. & Li, Z. On-line verification of current-state opacity by Petri nets and integer linear programming. Automatica 94, 205–213 (2018).
Cong, X. Y., Fanti, M. P., Mangini, A. M. & Li, Z. On-line verification of initial-state opacity by Petri nets and integer linear programming. ISA Trans. 93, 108–114 (2019).
Ma, Z., Li, Z. & Giua, A. Characterization of admissible marking sets in Petri nets with conflicts and synchronizations. IEEE Trans. Autom. Control 62, 1329–1341 (2016).
Badouel, E., Bednarczyk, M., Borzyszkowski, A., Caillaud, B. & Darondeau, P. Concurrent secrets. Discrete Event Dyn. Syst. 17, 425–446 (2007).
Dubreil, J., Darondeau, P. & Marchand, H. Opacity enforcing control synthesis. In Proceedings of the Ninth International Workshop on Discrete Event Systems, 28–35 (IEEE, 2008).
Lin, F. Opacity of discrete event systems and its applications. Automatica 47, 496–503 (2011).
Basile, F., De Tommasi, G. & Sterle, C. Non-interference enforcement in bounded Petri nets. In Proceedings of IEEE Conference on Decision and Control (CDC), 4827–4832 (IEEE, 2018).
Lafortune, S., Lin, F. & Hadjicostis, C. N. On the history of diagnosability and opacity in discrete event systems. Annu. Rev. Control 45, 257–266 (2018).
Labed, A., Saadaoui, I., Wu, N. & Li, Z. Basics of Petri nets. https://github.com/LabedAJalil/Observer-net.
Cassandras, C. G. & Lafortune, S. Introduction to Discrete Event Systems (Springer Science & Business Media, 2009).
Cassez, F., Dubreil, J. & Marchand, H. Synthesis of opaque systems with static and dynamic masks. Formal Methods Syst. Design 40, 88–115 (2012).
Acknowledgements
This work is partially supported by the Guangzhou Innovation and Entrepreneurship Leading Team Project Funding under Grant No. 202009020008.
Author information
Authors and Affiliations
Contributions
A.L., conceptualization ideas and evolution of research; S.I., algorithm design; N.W., reviewing, writing and editing; J.Y., algorithm code development; Z.L., leadership responsibility for the research activity planning and execution.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Labed, A., Saadaoui, I., Wu, N. et al. Current-state opacity verification in discrete event systems using an observer net. Sci Rep 12, 21572 (2022). https://doi.org/10.1038/s41598-022-25697-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-022-25697-y
- Springer Nature Limited