
Abstract
Ruffled surfaces that appear in biological forms, such as coral and lettuce, are a great source of inspiration for architectural and furniture design. This paper proposes a mechanism based on a bending-active scissors grid that effectively reproduces the process of differential growth. The structure can deploy from a linearly folded state with rotational symmetry to a complex ruffled surface without rotational symmetry. The deployed shape further exhibits a wave-like motion similar to the swimming gait of flatworms or cuttlefish. First, we propose a design method for the mechanism computed from the surface of constant negative Gaussian curvature. We then numerically analyze the symmetry-breaking process of deployment and zero-stiffness wave-like motion after deployment. We built two demonstrators to verify the deployment and the transformation. The first demonstrator with 1.5m diameter was fabricated to verify the symmetry-breaking deployment motion. The second demonstrator with 0.9m diameter was fabricated to demonstrate the wave-like motion by controlled pulling of the group of threads.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
1.1 Background
Deployable and transformable structures are effective for architecture and products that are used flexibly according to the environment and people’s needs. Deployment motions from compact forms to spatial forms can be designed based on the geometry of origami (Ando et al. 2020; Filipov et al. 2015; Gattas & You 2015; Tachi 2019), pneumatics (KAWAGUCHI & ENGINEERS n.d.; Maaskant & Roorda 1985; Panetta et al. 2021; Riches & Gosling 1998), bending active structures (Lienhard et al. 2011; Otto et al. 1994; Schikore et al. 2021), and linkage systems (Escrig 1985; Hoberman 1991; Roovers & De Temmerman 2017). They realize temporary structures applicable to shelters for disaster relief or pavilions for various events. Transformable mechanisms further provide adaptive surfaces such as shading (Armstrong et al. 2013) and acoustic reflectors (Thün et al. 2012); they allow for the control of the environment with less energy consumption.
We aim at a space structure that can be deployed from a compact state to complex spatial forms and remains transformable after deployment to further serve adaptive functions. Such structures would consume fewer resources and produce less waste, contributing to the realization of a circular economy and environmentally friendly society. However, designing multifunctional systems that are both deployable and transformable is not straightforward and requires a complex integration of mechanics and kinematics. To this end, we seek inspiration from how living organisms change their forms and functions. In particular, we draw inspiration from the frills created by the process of growth.
Frilly ruffles such as the ones seen in coral and lettuce leaves (Fig. 1) are ubiquitous in nature (Sobota & Seffen 2018; Yamamoto et al. 2021). The frilly surfaces result from buckling induced by in-plane differential growth; that is, out-of-plane deformation is induced by the non-uniform growth that makes the surface incompatible if stayed in a planar state. Such a process of differential growth has been reproduced in simulations (Takahashi & Tachi 2015; van Rees et al. 2017) and in experiments at the microscale (Kim et al. 2012). Frilled surfaces are also used to produce wave-like dynamic motion, such as the swimming gait of aquatic animals, such as flatworms and cuttlefish (Fig. 2). Such a motion is also a great source of inspiration for kinetic artifacts such as robots using this swimming gait (Chen et al. 2021; Filardo et al. 2020). When surfaces transform in general, they either change or keep their intrinsic metric, i.e., the distances and angles along the surfaces. The latter transformation is called intrinsically isometric transformation, which consists of only bending or folding. Growth is a transformation that changes the metric, while the wave-like motion of flatworms is nearly intrinsically isometric.

Ruffled surfaces in nature

Wave-like motion of a flatworm. Photo credit: Ogasawara-Photo / PIXTA
1.2 Objective
Inspired by this growth-based approach, this paper aims to explore the potential of the concept of surface and motion induced by growth in the context of transformable architectural and structural design. In particular, we are interested in the formation of complex frills from a simple geometry and the wave-like motion realized by the structure after the deployment.
Although the form of differential growth has been the theme for architectural (Hirata 2011) and product designs (NERVOUS SYSTEM BLOG n.d.), its applications were limited to static shapes as the growth cannot be directly realized by standard building materials that do not expand or contract. To effectively reproduce the growth process with in-plane metric changes in architectural structures, we consider the use of mechanisms. Specifically, we focus on mechanisms comprising straight members connected by revolute joints, which form a motion like pantographs or scissors (Fig. 3 Top). Although the mechanisms are composed of non-stretchable elements, the pantograph transformation of grids effectively produces stretch and shrinkage in diagonal directions if viewed macroscopically.

Intrinsic metric change due to scissors transformation of the grid (left–middle) and intrinsically isometric deformation (middle-right). Top: the grid element that produces the metric change in the diagonal direction and can further allow for intrinsically isometric transformations. Bottom: the proposed structure that forms a complex frilled form by the metric change and stay transformable after deployment
Deployable structures using scissors and pantographs made of rigid bars have been extensively studied (Escrig 1985; Hoberman 1991; Roovers & De Temmerman 2017). However, the resulting surfaces are fixed shapes in 3D and do not allow for an intrinsically isometrical deformation after the deployment. We, therefore, turn our attention to elastically deformable members connected by pivot hinges, i.e., deployable grid shell structures (Otto et al. 1994; Panetta et al. 2019; Schikore et al. 2021) as they produce a metric change while it allows for the bending in the out-of-plane direction. In particular, the geodesic grid shell, in which flat members (slats) follow the geodesics of the surface (Pillwein et al. 2020), is suitable for our purpose. Since the members are flexible in the out-of-plane bending in the geodesic grid shell, the incompatibility of in-plane deformation induces the buckling into the overall curved surface. If the elements are properly connected through pivots, the members stiff in the in-plane direction form a proper one-degree-of-freedom mechanism in the sense of intrinsic deformation; this makes the geodesic grid shell suitable for the control of intrinsic metric as explored in Nishimoto and Tachi (2023).
Furthermore, even after the intrinsic deployment is fixed, the intrinsically isometric motion can be obtained using the flexibility against the out-of-plane bending. Therefore, the structure is expected to be transformable even after the deployment (Fig. 3 right) if the deployed state is designed properly. In contrast to the existing design method (Nishimoto & Tachi 2023) that generates the fixed target shape, we try to aim at controlling the intrinsic metric to induce complex and transformable forms from a simple and compact state.
1.3 Contribution
The minimum unit of the geodesic grid shell is composed of two slats connected by a pivot, i.e., bending-active scissors. In this research, we assemble bending-active scissors to build a meter-scale transformable geodesic grid shell that reproduces the process of differential growth. The structure can transform between a linearly folded state and a surface of constant negative Gaussian curvature.
Although we proposed this concept in our preceding work (Ono & Tachi 2022), the process of symmetry breaking, the form after the buckling, and their motion have not been fully investigated. In this paper, we numerically analyze such non-linear behaviors. Furthermore, we built two demonstrators to verify the growth and the motion. Demonstrator 1 reproduces growth through changes in intrinsic metric by the scissors deployment, while Demonstrator 2 verifies the intrinsic isometric deformation of the obtained surface.
In this paper, we first show the geometric composition and the design strategy for realizing a constant negative curvature surface using bending-active scissors units (Sect. 2). Then, Sect. 3 analyzes the process of symmetry breaking through simulation and the measurement of potential energy. Specifically, we show how the number of frills is affected by the balance between the in-plane and out-of-plane stiffness and identify a wave-like quasi-zero-stiffness motion. We then show Demonstrator 1 with 1.5m diameter that can fold and deploy in Sect. 4 (Fig. 4). The model is fabricated by assembling bar and pivot parts cut out from sheets. Finally, we produced Demonstrator 2 with 0.9m diameter that can control the wave-like motion by pulling the group of threads in a coordinated way (Fig. 5). We provide a method for obtaining the control motion of threads by inversely computing from our simulated geometric model in Sect. 5.

Deployment motion of our structure in a meter-scale, exhibited at the competition and exhibition of innovative lightweight structures at the IASS annual symposium 2023, Melbourne, Australia, July 2023

Wave-like motion realized by phase-shifting of the structure, exhibited at connecting artifacts 03, Tokyo, Japan, September–November, 2023 (Connecting artifacts 2023)
2 Geometry
2.1 Gaussian curvature and differential growth
A differential growth where the growth rate increases from the center to the rim of the surface yields locally a saddle-shaped negative Gaussian curvature surface. When the surface keeps growing outward, it forms a ruffled surface, which is characterized by its broken symmetry. For example, consider extending a rotationally symmetric surface with constant negative curvature; then, it reaches a limit where it can no longer maintain its rotational symmetry. Expansion beyond the limit results in a ruffled surface without the rotational symmetry (Fig. 6).

Constant negative curvature surfaces of revolution (hyperboloid type) (left) and its growth beyond the limit
Since Gaussian curvature is inversely proportional to the square of the scale, extending the area of the surface x times while preserving the curvature is geometrically equivalent to increasing the absolute value of the curvature x times while preserving the size of the surface. Therefore, instead of extending the area of the surface outwardly, this study achieves differential growth behavior by deforming the surface such that the absolute value of curvature is gradually increased from a surface with little curvature.
2.2 Composition of the structure
We propose a mechanism in which m polar scissors units of different sizes are vertically connected to form a mirror-symmetric column and n columns are connected rotationally symmetrically to form a surface of revolution (Fig. 7). The shape of the i-th scissors (\(i=1,\dots m\)) indexed from the bottom to the top of a column is defined by the short edge length \(r_i\) and the long edge length \(R_i\). We call the Its deployed configuration can be expressed by the lower bottom \(x_i\in [0,2r_i]\) of the isosceles trapezoid that each scissors unit spans. \(x_i\) becomes larger as the unit deploys (Fig. 8). Also, for later use, let the angle of the i-th diagonal to the base be \(\theta _i\), the length of the upper base be \(X_i\), and the area is \(A_i\). These are functions of \(r_i\), \(R_i\), and \(x_i\).

Notations and design parameters for the design. Left: entire structure comprising n rotational copies of one column (colored). Right: close-up view of one column

Change in \(X_i\) as scissors deploy
Consider the one-column of the entire mechanism. Then, adjacent units are related as \(x_{i+1}=X_i\), so the deployment state of each module is sequentially determined once \(x_1\), i.e., the length of the bottom end of the column, is determined. Therefore, it forms a 1 degree-of-freedom (DOF) mechanism. The mirror symmetry of the one-column allows the columns to be connected to each other with rotational symmetry, and the entire mechanism also works in a one-DOF manner. Since there exists a state where \(x_i=X_i=0\), the entire mechanism can be folded into a compact cylindrical shape, \(x_i=0\) for any \(r_i\), \(R_i\).
The curvature of the surface can be explained by the curvature of the polyline forming the boundary of the one-column (red curves in Fig. 9). The Gaussian curvature of the entire surface is zero when the polyline becomes a straight line (middle of Fig. 9), positive when the polyline is convex (left side of Fig. 9), and negative when the polyline is concave (right side of Fig. 9). Thus, the opening and closing of the scissors deforms the polyline and result in changing the intrinsic curvature of the entire surface.

Change in the column’s boundary polyline as scissors deploy
We design such that the unfolded state has a constant negative curvature. The constant negative curvature condition gives a relationship between the area \(A_i\) and the angle \(\theta _i\) as described in Sect. 2.3. Based on these conditions, we compute the shapes of each unit sequentially from the bottom to the top of the column.
2.3 Design details
While Gaussian curvature is originally defined for second-order differentiable surfaces, our structure is discrete. Therefore, we evaluate the curvature of our structure by the integral quantities obtained by the Gauss-Bonnet formula. We consider a ring M formed by n rotational copies of the i-th trapezoid. We let the Gaussian curvature be K and surface elements be dA. Also, we let two directed boundaries of the M be \(\partial M\), along which the line elements are denoted by ds. Then, the Gauss-Bonnet equation is given by
where \(\chi\) is the Euler characteristic of the surface, \(k_g\) is the geodesic curvature along with \(\partial M\), and \(\sum \Theta\) is the sum of exterior angles of the corners of \(\partial M\). Since M is an annulus, \(\chi =0\), since M is polygonal, \(k_g=0\), and from Fig. 10, \(\sum \Theta =2n\theta _i-2n\theta _{i-1}\). Finally, by the assumption of the constant curvature \(\int _{M}{KdA}=nKA_i\), we obtain the following relationship between the i-th and \(i+1\)-th trapezoids.

Computing angle \(\theta _i\) to achieve constant Gaussian curvature
Note that we have two variables \(A_i\) and \(\theta _i\) and one Eq. (2), so we have a freedom to choose \(A_i\) for our purpose. When \(A_i\) is given, Eq. (2) gives a recurrence formula that uniquely defines the trapezoidal shape from the previous one. Therefore, the overall shape is determined by determining the initial values \(x_1^\text {target}\) and \(\theta _0\). Here, \(x_1 = x_1^\text {target}\) can be freely set as the state of development when the target curvature is obtained. \(\theta _0\) characterizes the curvature concentrated at the interior hole, i.e., how the hole can be filled by a surface. If we assume that we can fill the hole with a planar n-gon, we use \(2\pi /2n\) for \(\theta _0\), and if the surface is connected to a cylindrical shape, we use 0. From \(x_i\), \(A_i\), and \(\theta _i\), we construct the trapezoid unit and compute the shape parameters \(r_i\) and \(R_i\).
For the rest of the analyses and prototyping, we used the model with parameters \(n = 18\) and \(m = 8\) and computed the lengths of the bars by assuming \(\theta _0 = 2\pi /2n\).
In this model, \(x_1\) deploys from 0 to \(x_1^\text {target} =\)28.8mm when it reaches the constant negative curvature state with frills.
2.4 Mechanism assuming rotational symmetry
When the rotational symmetry of the structure is assumed, we can make a parametric model that represents the mechanism under symmetry assumption as follows. First, create a parametric model of a column of scissors and their bounding isosceles trapezoids that changes its deployment according to one parameter \(x_0\) (1 in Fig. 11). Next, compute the entire mechanism (2 in Fig. 11) by sequentially attaching isosceles trapezoids from the center to the rim. The rotational copies of the base of i-th trapezoid form a regular n-gon of radius \(l_i=\frac{x_i}{2}\csc \frac{\pi }{n}\). The isosceles trapezoids are tilted in slope \(a_i\), i.e., the tangent of the inclination angle, to make the \(i+1\)-th n-gon:
where \(h_i\) is the distance between the bases of the i-th trapezoid (Fig. 12).

Rotationally symmetric model built from an array of columns

Slope \(a_i\) computed from \(l_i\), \(l_{i+1}\), and \(h_i\)
Using the model, the deployment of the structure with rotational symmetry is obtained. However, as the deployment proceeds, the solution for the slope of the trapezoid in Eq. (5) starts to disappear. The critical moment is when the i-th ring becomes horizontal, i.e., \(2n\theta _i=2\pi\).
If the deployment continues beyond this moment in an actual structure, it can no longer maintain rotational symmetry and buckles into a ruffled surface (Fig. 13). In order to compute the shape after buckling, it is necessary to determine the equilibrium shape by considering the elastic deformation of the material.

Buckling into a ruffled surface with loss of rotational symmetry
3 Elastic analysis of frills
We create a computational bar-and-hinge model to simulate the elastic behavior of our structure. Under this model, we first simulate and analyze the deployment process from the cylindrical state to a target frilled state. We provide a smooth interpolation of the target surface from a single simulation instance, from which we can create a single parameter family of solutions to the obtained frilled state. We identify that these solutions have the same potential energy and that there exists a one-DOF zero-stiffness wave-like motion for a frilled state. Moreover, we show that the number of frills is determined by the proportion between the out-of-plane bending and in-plane stiffnesses.
3.1 Bar-and-hinge model
Instead of directly modeling a scissor element that can bend and twist and be joined by pivots, we approximate the system as a partially homogenized shell under an equilibrium of in-plane stiffness and out-of-plane bending stiffness. Here, we modify the bar-and-hinge model (Filipov et al. 2017; Grinspun et al. 2003) that models the in-plane stiffness using bars (springs) and out-of-plane stiffness using hinges (angular springs). We solved the equilibrium state using Kangaroo 2 (Piker n.d.) using provided goals and custom goals.
Figure 14 shows the composition of constraints in the bar-and-hinge model. To represent the in-plane stiffness, we let the unit trapezoid with a single pair of scissors consist of four bars along the diagonal scissor elements and four bars along the bases and the legs of trapezoids. We found that applying the same stiffness to all eight bars resulted in an overconstrained system that led to jaggy and unstable results. To solve this issue, we set the full stiffness to only six bars, namely the four diagonal bars and two bases, while keeping the legs’ stiffness very small. Empirically, we chose 0.015 of the full stiffness bars, which makes the legs, not the main element to carry the load but act as the regularization term to avoid artifacts due to discretization. For the bar elements, we used length in Kangaroo 2, which is a straight spring system. To represent the out-of-plane stiffness, we use a customized hinge component that represents the angular springs between two triangles. The stiffness of each hinge is computed to equate with the beam with a cross-section of \(w\times t\).

Simulation model. a Scissors represented as the bar-and-hinge model. b Definition of the fold angle \(\rho\) and heights of the triangles h1 and h2
The following is the list of constraints, potential energy U, and the names of goals in the bracket used in Kangaroo. Here, E represents Young’s modulus.
-
1.
In-plane: The linear springs that keep each \(r_i\) and \(R_i\) at their original length and keep \(x_i\) at their target length. \(U_{\text {in}} = \frac{1}{2} Ewt \left( \frac{\ell - \ell _0}{\ell _0}\right) ^2\), where \(\ell\) is the length of each bar and \(\ell _0\) is the target length of the bar. [Length(line)]
-
2.
Regularization: The linear springs that regulate discretization artifacts. We keep \(y_i\) at the ideal length, but with a small value \(U_\text {reg} = \frac{p}{2} Ewt \left( \frac{\ell - \ell _0}{\ell _0}\right) ^2\), where \(p = 0.015\). [Length(line)]
-
3.
Out-of-plane: The angle springs that keep the quadrangles planar to represent the out-of-plane stiffness. \(U_\text {out}= \frac{1}{2} \frac{Elt^3}{8h} {\rho }^2\), where \(\rho\) is the fold angle between two triangles, l is the length of the hinge, and h is the sum of heights of the triangles sharing the base. [Hinge]
-
4.
Boundary condition: Constraints that keep the bottom vertices of the mechanism in an ideal position on the same plane. [Anchor]
Note that our model is not accurate enough to predict the exact load and energy from the given dimension. Instead, the model focuses more on how the overall behavior is dimensionally affected by parameters. Our system is governed by the balance between the in-plane and out-of-plane stiffness of the surface, where the former is proportional to the thickness t and the latter is proportional to the cube of the thickness \(t^3\). Therefore, we vary t to calibrate and control the system’s behavior. Specifically, our model computed with the thickness of t =3mm reproduced a similar result to our fabricated physical models with thinner material t =1mm. Therefore, we varied t from 2mm to 4mm and performed the rest of the simulation.
3.2 Deployment analysis
We simulated the deployment process from the rotationally symmetric state to the desired ruffled form using the model created as described in Sect. 3.1. We changed \(x_1\) from 14.4mm (rotationally symmetric state) to 28.8mm (fully deployed state) in 1000 steps; for each step, we performed a sufficiently large number of steps (average 35.6 steps) of iterations in Kangaroo 2 solver, to emulate a quasi-static process.
For all parameters \(t=2,3,4\) mm, the mechanism first deploys while keeping the rotational symmetry; but when it reaches a limit, the mechanism loses its rotational symmetry and forms a ruffled surface. Figure 15 shows the potential energy of the mechanism associated with this symmetry-breaking buckling process. We plot the graphs with the \(x_1\) on the horizontal axis and the potential energy on the vertical axis. First, the mechanism deploys without any in-plane energy introduced. Just after \(x_1\) passes the limit of the geometric model with rotational symmetry (Ono & Tachi 2022), the in-plane potential energy increases rapidly, and the structure reaches a highly frustrated state. Then, the symmetry breaks with a reduction of the in-plane potential energy and an increase of out-of-plane potential energy.

Plot of the potential energy U with respect to the shift change \(x_i\) for three different thicknesses t. a \(t = \text {2mm}\), b \(t=\text {3mm}\), c \(t=\text {4mm}\)
Typically, the resulting forms have an N-fold rotational symmetry, i.e., there are N repetitions of ups and downs within one cycle. We call N the frill number. We found that the frill numbers differ for different thicknesses and change during deployment (Fig. 15). Here we use \(\sum U_\text {in} + \sum U_\text {reg}\) as the in-plane energy and \(\sum U_\text {out}\) as the out-of-plane energy. The vertical short bar at 23.15mm indicates the theoretical limit for the geometric model with rotational symmetry.
Specifically, for (a) \(t=\text {2mm}\) case, the symmetry changed from \(N=\infty\) (circular symmetry) to \(N=4\). (b) for \(t=\text {3mm}\), the symmetry first changed from \(N=\infty\) to \(N=4\) and took many steps of iteration after the deployment to change into \(N=3\). (c) for \(t=\text {4mm}\), the symmetry moved from \(N=\infty\) to \(N=4\), and then \(N=2\). Although the final stable state is affected by the thickness, the results suggest the existence of (near) metastability at different frill numbers.
3.3 Frill number stability
We examine the metastability of and the transition between the states with 2, 3, and 4 frills, i.e., if they are the global or local minimum energy states for different thicknesses. To compare the energy states of the mechanism with different frill numbers, we run the same simulation with the initial state of frill number values of 2, 3, and 4 computed from different thickness settings. The transition process is illustrated in Fig. 16, where the horizontal axis shows the timestep and the vertical axis shows the potential energy. First, in \(\sim 200\) steps, the energy drops and reaches the plateau state while keeping the shape almost identical. However, later with 5 to 10 times more steps, the form falls into a different local minimum energy state but with the same frill numbers. High hinge fold angles for some models suggest that these states after transition may not be a real phenomenon but an artifact of our bar-and-hinge model.

Plot of the potential energy U with respect to the steps of iteration for \(t=2,3,4\)mm starting from \(N=2,3,4\) initial states. The form transitions into another state but with the same frill number
Figure 17 compares the potential energy of these plateau states for different t. This suggests that the chosen state in the forward deployment state is not necessarily the minimum energy state. However, a finer elastic model is required to describe the metastability of the structure fully.

Potential energy of the structure with different N and thickness t
3.4 Interpolated surface and phase-shifting motion
Macroscopically, the original cylindrical configuration has a circular symmetry, i.e., it can be rotated at an arbitrary angle about an axis \(N=\infty\). Also, the in-plane deployment that aims at the constant Gaussian curvature everywhere has the same intrinsic symmetry. However, the wave-like frilled form loses this continuous symmetry and becomes N-fold symmetric. Because of the original intrinsic symmetry, there is a one-parameter family of possibilities for where the mountain and valley of the frills are located, thus the “phase” of the frills. We model such a phase shift.
We first construct an interpolated parametric surface model from the discrete simulation result. From the grid of points on the corner of trapezoids, \(\textbf{p}(i,j)\) for \(i=0,\dots ,n-1 \mod n\) and \(j=0,\dots ,m\), we interpolate them with the periodic NURBS surface \(\textbf{f}(u,v)\) for \(u\in [0,2\pi )\) and \(v\in [0,1]\), such that \(\textbf{p}(i,j) = \textbf{f}\left( \frac{2\pi i}{n}, \frac{j}{m}\right)\) (Fig. 18a).

a Grid point \(\textbf{p}(i,j)\) and interpolated surface \(\textbf{f}(u,v)\). b Shifting the phase of the frills by angle \(\delta\) by map \(\textbf{f}\rightarrow \textbf{f}^{\prime }\)
We first align the center to the z axis and use cylindrical coordinate \(\textbf{f}= (f_\theta ,f_r,f_z)\). Then, the N-fold rotational symmetry of the simulated result can be verified by the following operation:
Now, the phase of the frills of the interpolated surface can be shifted by angle \(\delta\) by the following map \(\textbf{f}\rightarrow \textbf{f}'\) (Fig. 18b):
Here, we use (u,v) to keep track of the positions of the actual material, i.e., a point at \(\textbf{f}(u,v)\) moves to \(\textbf{f}'(u,v)\) by this phase shifting operation. Note that the addition of \(\delta\) to the angle represents the rotation of the image of the surface, while the subtraction of \(\delta\) to the parameter represents that the material itself stays not globally rotated. After this operation, we can sample the point coordinate \(\textbf{p}'(i,j) = \textbf{f}'\left( \frac{2\pi i}{n}, \frac{j}{m}\right)\) to recover the scissors structure with a phase-shift.
We performed the bar-and-hinge simulation of Sect. 3.1 using the shifted scissors structure as the initial state while adding weak springs to bring the points to \(\textbf{p}'(i,j)\). Figure 19 shows the plot of the strain energy of the structure with respect to the shift change of \(\delta \in [0,360^\circ )\). We experimented for \(N=2,3,4\) cases with thicknesses of \(t=\text {4mm},\text {3mm},\text {2mm}\) with a \(n=18\) model.

Plot of the strain energy with respect to the shift change of \(\delta\). a \(N=2\), b \(N=3\), c \(N=4\)
We observed a nearly horizontal plot of energy with 18 bumps of in-plane energy. These bumps are attributed to the discrete structure caused by the radial division by \(n=18\) The amplitude of bumps is large for \(N=2\) and \(N=3\) and smaller for \(N=4\). The higher amplitude of the bumps in \(N=2\) and 3 may come from that n is the integer multiple of N when the hinge elements are aligned at the peaks of the ruffles, so the effect of the discretization is strongly reflected in the overall energy. It is still open if this effect is an artifact of computation or may appear in the real object; in the latter case, choosing the number of elements that are not integer multiple of N may lead to a smoother actuation.
4 Demonstrator 1: deployment
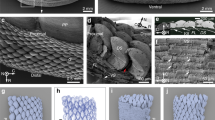
We designed 1.5m demonstrator that can be compactly folded and deployed (Figs. 4 and 22). Our structure is a 1.7 times scaled version of the simulation model shown in (3) and (4). It transforms from a cylindrical shape with about 200mm into a frilled shape with about 1500mm in diameter. The total weight of the structure is 1.8kg.
4.1 Fabrication
We chose 1mm thick sheets of vulcanized fiber (HB-77, Hokuetsu Toyo Fibre) sheets as a sustainable, lightweight, and easy-to-fabricate material. This material is made of cellulose fibers treated with chemicals to break them down to the nano-level. The fibers are tightly intertwined, making the material hard and tenacious. It is also highly biodegradable and has a smaller environmental footprint than plastics and metals. For fabrication, we take advantage of the fact that it softens and becomes plastic when moist while it hardens and becomes elastic when dry.
We made our design modular; we assembled multiple units that can be removed and added depending on the required size or partially replaced to repair the damage to the structure. All pavilion components are cut using a laser cutting machine. The maximum size of the components is determined by the size of the machine (\(600\,\text {mm} \times {450}\,\text {mm}\)).
The module design is inspired by the techniques of making pivots in a pop-up book. A polar scissors unit is composed of two types of members; one is a bar-shaped member, and the other is a cross-shaped connecting member (Fig. 20). The bar has three holes (top, center, and bottom) where a cross-shaped pivot slides in. The tip of the cross-shaped pivot is tapered to prevent it from falling out of the hole. When assembling, the cross-shaped pivot is soaked in water before passing through the hole. After the joint is passed, the pivot module is dried using an iron (Fig. 20) so that it becomes hard again.

Joint details and assembly process
The scissor units of 8 different sizes are rotationally symmetrically connected in 18 rows to form a cylindrical shape. Finally, the nylon threads are passed through the diagonals of the units, which are used to control the deployment of the pavilion (Fig. 21). We call these threads intrinsic wires as they control the intrinsic metric of the surface. We placed nine nylon threads radially along the surface, so pulling the threads increases \(x_1\).

Diagonal threads (intrinsic wires) to control the deployment
4.2 Deployment into frills
The structure is hung bottom side up, and the threads are pulled through nine pulleys and merged into one vertical end thread (Fig. 22). By pulling the end thread vertically, we succeeded in deploying the mechanism. We observed the process of buckling where the rotational symmetry is lost, and a three-fold ruffled surface appears (Fig. 4). The frill number was consistently three when it was deployed. However, manually manipulating the surface made it also possible to stabilize the structure in a state with two frills.

Overview of demonstrator 1
These behaviors are similar to the case when we simulated with 3mm thickness model (which is in real scale 5.1mm). The difference from the actual thickness of 1mm may be attributed to the overestimated in-plane stiffness of the structure in the simulation model, i.e., a real sheet with curvature can deform more softly with respect to compression. Also, the effect of gravity is non-negligible for making the actual model. For example, it was impossible to control the deployment when the bottom side was fixed on the ground; in this case, gravity started to actuate the deployment.
5 Demonstrator 2: wave-like motion
As simulated in Sect. 3.4, the wave-like frilled form after deployment is stable not only in one position, allowing the frilled position to be shifted with almost zero force. We made the second demonstrator with 0.9m that exhibit this wave-like motion around the perimeter. In this demonstrator, we used 1mm thick Polyoxymethylene (POM) to achieve durability and elasticity. In contrast to Demonstrator 1, the intrinsic metric of Demonstrator 2 is fixed, while the extrinsic positions of the surfaces are changed to implement the intrinsically isometric deformation.
The controlling strategy for this motion is as follows. As our intention is to control the motion without changing the intrinsic metric, at least one actuator needs to actuate the surface extrinsically. Although ideal zero-stiffness motion would lead to the one-DOF mechanism that can be controlled by a small part of the surface, the control position needed to be radially distributed with respect to its three-fold symmetry since the structure has multiple stable configurations that can be easily transitioned between. To produce a wave-like motion, we used a system of taut wires reciprocating with three different phases. These wires do not follow the curved surfaces and are called extrinsic wires. We ended up in a system with nine extrinsic wires connected to individual actuators.
5.1 Control method
We propose a method to control the wave-like motion by applying a tensile force to the perimeter of the structure. Specifically, we attach a set of wires (extrinsic wires) in addition to the ones that control the deployment (intrinsic wires) that pull the structure together to connect the pivots on the perimeter with the pulleys attached to the top support of the structure. We generate phase-shifting motion by controlling the lengths of the extrinsic wires.
To allow for a smooth motion, we apply the idea of a three-phase alternation. Specifically, we group the wires into three groups \(g = 0, 1, 2\) with different phases separated by 1/3 of the wavelength. The threads in the same group are placed every \(2\pi /N\) to make the system follow the N-fold symmetry, so there are 3N threads in total (Fig. 23).

Wires in three groups
We identify the path of the thread lengths that are required to generate a wave-like motion. We use the phase-shifted interpolated surface of a simulated result \(\textbf{f}^{\prime }(u,v)\) given in Sect. 3.4. The 3N points of control are given by
where \(n=0,1,\dots ,N-1\) and \(g=0,1,2\). Then, the lengths l of wire connected at \(u=u_0\) from the endpoints to the pulleys at time t is given by the following equation (Fig. 24):
where \(\textbf{r}(u_0)\) is the position of the pulley for \(u_0\), and \(\textbf{f}'\) is computed using Equation (7). The perimeter endpoints oscillate in a figure of 8 during the phase-shifting motion (Fig. 25). Using this control, the thread is expected to be in tension at all times without sagging. The trajectory when t is varied from 0 to \(2\pi\) is shown in Fig. 23. By following the computed lengths of the thread, the structure can smoothly move in a wave-like motion. Note that the wavelengths of three groups with different phases are shifted by \(2\pi /3\).

Determining wire length over time

Sequential images of the phase change. A point on the perimeter draws a figure of 8
5.2 Mechanical setup
To control the phase of the frills, we implemented a machinery setup that control the frilly shape with wires. The configuration is shown in Fig. 26. It consists of the frill structure suspended from a column, intrinsic wire, extrinsic wire, and stepper motors. The intrinsic wires are similarly arranged to the deployment threads in Sect. 4, i.e., they are arranged radially to connect the pivot at the top and the perimeter of the structure along the surface. They are weaved in the scissors to follow the surface to be deployed and have the intrinsic curvature fixed to the target during the motion. The intrinsic wires are made of stainless wires with \(0.5~\textrm{mm}\) diameters, and their length are \(463~\textrm{mm}\).

Mechanical setup for the wire control of the phase. From symmetry, only one-third of the structure is shown
The extrinsic wires connect the pivots at the perimeter and stepper motors via pulleys near the top. They connect the pivots and the pulleys along a straight line in the 3D space to apply out-of-plane force to control the phase-shifting motion. The intrinsic and extrinsic wires are arranged to the row of scissors alternately so that the number of wires for each set should be nine. The extrinsic wires are made of nylon-coated stainless wire with \(0.24~\textrm{mm}\) diameters, and their lengths are controlled using stepper motors.
The sequential change in lengths of extrinsic wires is calculated from a simulated model as shown in Fig. 27. Nine stepper motors wind up the extrinsic wires using bobbins with \(20~\textrm{mm}\) in diameters. Three motors in symmetrical positions have the same movement; We prepare three sets of them so that each set has a phase shift of \(2\pi /3\) with each other. The stepper motors (42SHD4002-24B, holding torque \(300\ \text {mN} \cdot \text {m}\)) are controlled from Arduino Uno via motor driver (DRV8835).

Changes in wire lengths in the three groups with respect to time
To realize the motion, a single phase of the control paths shown in Fig. 27 is discretized into a 60-vertice polyline and the wire lengths are controlled along this polyline. The velocity was determined so that one phase should move in 60 seconds.
5.3 Evaluation of wave-like motion
The intended wave-like motion is achieved as shown in Fig. 5. The model was installed and exhibited at the CONNECTING ARTIFACTS 03 (Connecting artifacts 2023). During the exhibition period, we sometimes observed a failure mode of the mechanism, where the extrinsic wires were loosened during the motion, leading to their entanglement. The mismatch between the simulation and the actual model may have caused the failure.
6 Conclusion
We proposed a growth-inspired deployable and transformable structure using a bending-active scissors grid. The structure can deform from a simple linear state to a complex ruffled surface and stay transformable after the deployment. We first numerically confirmed the symmetry-breaking process of deployment and zero-stiffness wave-like motion after deployment. We then built two demonstrators and verified the symmetry-breaking deployment and the wave-like transformation after the deployment.
We envision that the proposed structure can be used for various architectural applications, taking advantage of its characteristic movement. For example, our structure may be used as a work booth in an office space, reducing the oppression of the typical work booth closed off by walls. We hope that the bioinspired and biophilic nature of the structure improves the user’s ability to concentrate, reduce stress, and increase intellectual productivity (Fig. 28).

Potential use of our structure: a personal booth in an office space
Our analysis was limited to a specific set of geometric parameters; however, changing these parameters, such as total curvature, may change the overall behaviors. In the future, we want to investigate the effect of total curvature on the number of frills and the process of buckling. Also, the metastability of the N-fold frills is still not fully understood. A model with improved accuracy is necessary to explain the metastability. Finally, our demonstrators are limited in verifying the structural concept, and significant work needs to be done to make our structure practical in real-world applications. Technical improvement of the robustness of the control system of phase-shifting motion in Demonstrator 2 remains a future task. In addition, we would like to explore broader and more impactful applications of our structures in the future.
Availability of data and materials
The data and material will be available upon reasonable request.
References
Ando, K., Izumi, B., Shigematsu, M., Tamai, H., Matsuo, J., Mizuta, Y., Miyata, T., Sadanobu, J., Suto, K., & Tachi, T. (2020). Lightweight rigidly foldable canopy using composite materials. SN Applied Sciences, 2, 1–15. https://doi.org/10.1007/s42452-020-03846-0
Armstrong, A., Buffoni, G., Eames, D., James, R., Lang, L., Lyle, J., & Xuere, K. (2013). The al bahar towers: multidisciplinary design for middle east high-rise. The Arup Journal, 48(2), 60–73.
Chen, Z., Hu, Q., Chen, Y., Wei, C., & Yin, S. (2021). Water surface stability prediction of amphibious bio-inspired undulatory fin robot. In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 7365–7371). https://doi.org/10.1109/IROS51168.2021.9636182
Connecting artifacts. (2023). CONNECTING ARTIFACTS 03. https://sites.google.com/view/connecting-artifacts/03. Accessed 5 June 2024.
Escrig, F. (1985). Expandable space structures. International Journal of Space Structures, 1(2), 79–91.
Filardo, B. P., Zimmerman, D. S., & Weaker, M. I. (2020). Vehicle with traveling wave thrust module apparatuses, methods and systems. US Patent App. 16/730,649.
Filipov, E., Liu, K., Tachi, T., Schenk, M., & Paulino, G. H. (2017). Bar and hinge models for scalable analysis of origami. International Journal of Solids and Structures, 124, 26–45. https://doi.org/10.1016/j.ijsolstr.2017.05.028.
Filipov, E. T., Tachi, T., & Paulino, G. H. (2015). Origami tubes assembled into stiff, yet reconfigurable structures and metamaterials. Proceedings of the National Academy of Sciences, 112(40), 12321–12326.
Gattas, J. M., & You, Z. (2015). Geometric assembly of rigid-foldable morphing sandwich structures. Engineering Structures, 94, 149–159. https://doi.org/10.1016/j.engstruct.2015.03.019.
Grinspun, E., Hirani, A. N., Desbrun, M., & Schröder, P. (2003). Discrete shells. In Proceedings of the 2003 ACM SIGGRAPH/Eurographics symposium on Computer animation (pp. 62–67).
Hirata, A. (2011). Tangling. LIXIL Publishing.
Hoberman, C. (1991). Radial expansion/retraction truss structures. US Patent 5,024,031.
KAWAGUCHI & ENGINEERS. Expo’70 Fuji Group Pavilion. https://kawa-struc.com/expo70-2/?ref=langen. Accessed 5 June 2024.
Kim, J., Hanna, J. A., Byun, M., Santangelo, C. D., & Hayward, R. C. (2012). Designing responsive buckled surfaces by halftone gel lithography. Science, 335(9), 1201–1205. https://doi.org/10.1126/science.1215309.
Lienhard, J., Schleicher, S., & Knippers, J. (2011). Bending-active structures–research pavilion icd/itke. In 35th Annual Symposium of IABSE/52nd Annual Symposium of IASS/6th International Conference on Space Structures: Taller, Longer, Lighter-Meeting growing demand with limited resources, London, United Kingdom, September 2011 (p. 1).
Maaskant, R., & Roorda, J. (1985). Stability of cylindrical air-supported structures. Journal of Engineering Mechanics, 111, 1487–1501.
NERVOUS SYSTEM BLOG. Floraform - an exploration of differential growth. https://n-e-r-v-o-u-s.com/blog/?p=6721. Accessed 5 June 2024.
Nishimoto, S., & Tachi, T. (2023). Transformable Surface Mechanisms by Assembly of Geodesic Grid Mechanisms (pp. 221–234). In Advances in Architectural Geometry 2023, De Gruyter. https://doi.org/10.1515/9783111162683-017
Ono, F., & Tachi, T. (2022). Growth deformation of surface with constant negative curvature by bending-active scissors structure. In Proceedings of the International Association for Shell and Spatial Structures 2022.
Otto, F., Hennicke, J., & Matsushita, K. (1974). IL 10 Gitterschalen
Panetta, J., Isvoranu, F., Chen, T., Siéfert, E., Roman, B., & Pauly, M. (2021). Computational inverse design of surface-based inflatables. ACM Transactions on Graphics (TOG), 40(4), 1–14. https://doi.org/10.1145/3450626.3459789.
Panetta, J., Konaković-Luković, M., Isvoranu, F., Bouleau, E., & Pauly, M. (2019). X-shells: a new class of deployable beam structures. ACM Transactions on Graphics, 38(4). https://doi.org/10.1145/3306346.3323040
Piker, D. K2goals. https://github.com/Dan-Piker/K2Goals. Accessed 5, June 2024.
Pillwein, S., Leimer, K., Birsak, M., & Musialski, P. (2020). On elastic geodesic grids and their planar to spatial deployment. ACM Transactions on Graphics, 39, 125. https://doi.org/10.1145/3386569.3392490
Riches, C., & Gosling, P. (1998). Pneumatic structures: A review of concepts, applications and analytical methods. In Proceedings of the IASS International Congress (vol. 98, pp. 874–882).
Roovers, K., & De Temmerman, N. (2017). Geometric design of deployable scissor grids consisting of generalized polar units. Journal of the International Association for Shell and Spatial Structures, 58(3), 227–238. https://doi.org/10.20898/j.iass.2017.193.865.
Schikore, J., Schling, E., Oberbichler, T., & Bauer, A. M. (2021). Kinetics and design of semi-compliant grid mechanisms. Advances in Architectural Geometry, 2020, 108–129. https://eikeschling.com/2021/09/14/kinetics-and-design-of-semi-compliant-grid-mechanisms/.
Sobota, P. M., & Seffen, K. A. (2018). Nonlinear growing caps. In Proceedings of IASS Annual Symposia (vol. 2018, pp. 1–8). International Association for Shell and Spatial Structures (IASS).
Tachi, T. (2019). Introduction to structural origami. Journal of the International Association for Shell and Spatial Structures, 60(1), 7–18. https://doi.org/10.20898/j.iass.2019.199.004.
Takahashi, Y., & Tachi, T. (2015). Buckled double-curved surface using a controlled pattern of in-plane strain. Proceedings of IASS Annual Symposia, 2015(30), 1–11.
Thün, G., Velikov, K., Ripley, C., Sauvé, L., & McGee, W. (2012). Soundspheres: resonant chamber. Leonardo, 45(4), 348–357. https://doi.org/10.1162/LEON_a_00409.
van Rees, W. M., Vouga, E., & Mahadevan, L. (2017). Growth patterns for shape-shifting elastic bilayers. Proceedings of the National Academy of Sciences, 114(44), 11597–11602. https://doi.org/10.1073/pnas.1709025114.
Yamamoto, K. K., Shearman, T. L., Struckmeyer, E. J., Gemmer, J. A., & Venkataramani, S. C. (2021). Nature’s forms are frilly, flexible, and functional. The European Physical Journal E, 44(7), 95. https://doi.org/10.1140/epje/s10189-021-00099-6.
Acknowledgements
We thank Hiroki Tamai for the helpful discussions on the elastic analysis of our structures.
Funding
This project is supported by JST PRESTO JPMJPR1927, JST AdCORP JPMJKB2302, KAKENHI 22H04954, Nikken Sekkei Ltd., and Nohmura Foundation for Membrane Structures Technology.
Author information
Authors and Affiliations
Contributions
FO and TT conceived and led the overall study. FO, SN, KS, and TT conducted the simulational analysis. FO, MK(leading), SN, KS, MS, and TT conceptualized and built Demonstrator 1. FO, HK, SN, KS, and TT conceptualized and built Demonstrator 2. FO (leading), MK, KS, HK, SN, and TT (leading) prepared the manuscript. TT supervised the entire work.
Corresponding authors
Ethics declarations
Competing interests
The authors are supported by Taiyo Kogyo Corporation, Nikken Sekkei Ltd., and the University of Tokyo.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ono, F., Kamijo, H., Kase, M. et al. Growth-induced transformable surfaces realized by bending-active scissors grid. ARIN 3, 21 (2024). https://doi.org/10.1007/s44223-024-00065-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44223-024-00065-0