
Abstract
Mass customization of prefabricated architecture is becoming increasingly crucial for developing the architectural industry. Advanced technologies such as 3D printing and unmanned aerial vehicles (UAV) has brought opportunities and challenges for traditional fabrication and construction methodology. Based on these emerging digital design tools and intelligent construction methods, this paper presents a novel methodology for fabricating single-layer 3D printing panels using UAV positioning technology, which has the potential to revolutionize the construction process and enhance the overall efficiency. This paper first provides a comprehensive review of the existing technologies in 3D printing and UAV positioning, highlighting their benefits and limitations in the context of construction applications. Next, a step-by-step process for fabricating single-layer 3D printing panels is introduced, detailing the optimal design parameters, material selection, and printing techniques. The utilization of UAV for precise positioning and alignment of the panels is then discussed, including the development of an on-site installation for accurate control. To validate the proposed method, a construction practice of the Chengdu Agricultural Expo Centre is produced o demonstrate the promising manufacturing and installation of single-layer 3D printed panels using UAV positioning technology. The results indicate that this method significantly reduces construction time, material waste, and labour costs, while also demonstrating significant customization and design flexibility.
Similar content being viewed by others

Explore related subjects
Find the latest articles, discoveries, and news in related topics.Avoid common mistakes on your manuscript.
1 Introduction
Traditional perceptions of the construction industry as conservative and resistant to change are largely a product of the complexities inherent in construction projects and a historical reliance on conventional methodologies (Azhar, 2011). The impediments presented by these traditional methodologies arguably hampered the evolution and progress of architectural practices in the early twentieth century. High construction costs and the necessity for skilled labor have hindered the conception and creation of complex, free-form components (Schodek et al., 2004). However, with the advent of Industry 4.0 and a burgeoning demand for mass customization, there is an amplified need for innovative technologies and methodologies. Such innovations are indispensable for enhancing operational efficiency, minimizing costs, and delivering tailored solutions to clients (Pine, 1993). Recent advancements have seen additive manufacturing, or 3D printing, heralded as a viable solution for the construction sector. The layer-by-layer fabrication process intrinsic to this technology facilitates the creation of intricate, bespoke designs, which are otherwise challenging to accomplish through traditional construction methods (Khoshnevis et al., 2016). Empirical evidence suggests that the application of 3D printing in construction significantly curtails material wastage, labor costs, and construction timelines, while simultaneously augmenting design versatility and structural performance (Lim et al., 2012; Rael & San Fratello, 2014). Nevertheless, due to the varying precision and dimensions of the components, accurate positioning and installation of 3D printed components remain persistent challenges in the construction process. In the milieu of mass customization, there is a requisite for further exploration of adaptive design and fabrication methodologies for 3D printed components, as well as the evolution of real-time installation processes. Unmanned Aerial Vehicles (UAVs), an emerging technology, exhibit considerable potential for the contemporary construction industry. They have found increasing applications in surveying, mapping, and inspection tasks, providing high-resolution data and real-time monitoring capabilities (Molina et al., 2023; Yang et al., 2022). The incorporation of UAVs into construction processes can enhance precision, mitigate human intervention, and facilitate the execution of tasks conventionally deemed hazardous or challenging (Gheisari & Irizarry, 2015). This study seeks to address these challenges by proposing an innovative methodology for fabricating single-layer 3D printed panels using UAV positioning technology. This integration capitalizes on the inherent advantages of both technologies, thereby presenting a unique opportunity to transform the construction process by optimizing design parameters, material selection, and printing techniques. The Chengdu Agricultural Expo Centre (Fig. 1) is utilized as a case study, specifically analyzing UAV positioning and scanning technology in conjunction with the concept of digital twins for multiple data coupling on the Rhino platform. This digital, intelligent construction process enables multi-stakeholder participation in the construction lifecycle for real-time monitoring of on-site installation precision and progress.

A photograph of the completed project of Chengdu Agricultural Expo Centre
2 Literature review
2.1 Review of 3D printing material performance from the perspective of mass customization
The architectural industry, a key economic driver globally, substantially consumes the world's total raw materials (Craveiro et al., 2019). Additive manufacturing provides myriad advantages for constructing components using a variety of materials, including plastics, metals, and polymers. The benefits span automated production, design flexibility, and process optimization (Paolini, Kollmannsberger & Rank, 2019). Five primary materials are prevalent in 3D printing for building construction: ABS, metal, concrete, clay, and PLA. Each material exhibits unique attributes concerning density, cost, environmental impact, aesthetics, and strength. ABS and PLA demonstrate lower densities compared to metal, concrete, and clay, thus offering an advantage in reducing building loads. Concrete and clay are more economically viable than PLA and ABS. However, the slow solidification rate of concrete requires consideration of both elastic buckling stability and the plastic collapse limit when fabricating large-scale components (Suiker et.al., 2020). The deformation of 3D printed concrete materials, when used as building elements, is a primary concern, substantially impeding the mass-production of building elements using 3D printing technology (Gebhard et al., 2023). 3D printing with metal proves to be the most costly among these five materials when considering the price of requisite equipment and materials. Nonetheless, steel and aluminum, as primary components, can be recycled at a 100% rate (Munn et al., 2004). Clay is the most environmentally friendly material, with the potential for unlimited reuse under specific conditions (Alonso Madrid et al., 2023). Concrete ranks as the second most sustainable material due to its 90% recyclability. Although its production emits significant CO2 levels, concrete buildings emit less CO2 in use compared to other materials (Marijnissen & van der Zee, 2017). ABS and PLA offer a greener alternative to metal. However, compared to the remaining materials, clay displays inferior mechanical strength. Overall, ABS demonstrates promising applications in architecture due to its cost-effectiveness and lightweight properties, thereby facilitating construction and reducing material costs (Table 1). ABS can also be recycled, enhancing building sustainability (Kumar et.al., 2018). ABS showcases exceptional toughness and impact resistance, making it suitable for durable architectural components' printing. Moreover, ABS's higher glass transition temperature allows it to offer superior performance as a roofing component in outdoor or high-temperature environments (Żur et.al., 2020).
2.2 Practical application of 3D printing technology in engineering projects
The ongoing digital revolution has fostered an integrated manufacturing process encompassing design, 3D printing workflows, and construction specifications, thereby introducing unparalleled opportunities to the architectural industry and enhancing the diversity of construction projects. Innovations in computer-aided design, additive manufacturing, and materials science have broadened the horizons for self-assembly systems, mass customization, and material property alterations (Mitchell et al., 2018). Emergent design forms, previously challenging to realize with conventional construction methods, are now feasible. As architecture aims to minimize resource consumption during construction and operation, thereby curtailing environmental harm induced by emissions, pollution, and waste (Beyhan et al., 2018), the integration of additive manufacturing technology can enhance a building's energy performance throughout its life cycle (Kamel & Kazemian, 2023). Specifically, merging 3D printing technology with passive design can boost buildings' thermal comfort and render 3D printing technology an appropriate choice for constructing building envelopes (Christen, van Zijl & de Villiers, 2023). Utilizing 3D-printed recyclable and transparent materials for curtain walls can diminish artificial lighting usage, thereby elevating buildings' energy efficiency (Ghasemieshkaftaki et al., 2021).
Large-scale 3D printed facade panels, characterized by complex single-material geometries, proposed by the Faculty of Architecture and the Built Environment at Delft University of Technology, exhibit immense potential for time and cost savings (Sarakinioti et al., 2018). The potential application of 3D printing technology in the architectural industry is promising when integrated with existing research. However, interdisciplinary research is essential to expedite the development of novel materials, processes, and printing techniques. It also ensures quality assurance and offers reliable mechanical performance data, thereby enabling a more thorough exploitation of 3D printing's potential in infrastructure engineering (Delgado Camacho et al., 2018). In the 2020 Nanjing Happy Valley gate project, 3D printed fiber-reinforced double-layered panels were extensively employed in practical construction. The integration of the FUROBOT software platform and self-developed 3D printing hardware offered architects more intuitive control over the construction process during the design phase (Yuan et al., 2022a, 2022b). According to Bañón and Raspall (2022), future research should concentrate on process parameters, printable geometries, cost, production time, and assembly strategies within the context of 3D printing PETG technology.
2.3 Review on UAV application in the process of construction
The construction industry's quest for innovative solutions to improve productivity and quality has propelled the integration of UAVs into a promising position. Presently, the use of UAVs in prefabricated construction primarily involves three aspects: site assessment and planning, transportation and logistics, and module installation. Specifically, the UAV is equipped with an array of sensors to garner multidimensional data, including imagery, LiDAR, and multi-spectral. These sensors procure information in varying dimensions and resolutions, facilitating a detailed analysis of the target area. Upon data collection, multidimensional data coupling integrates data from diverse sensors to create a comprehensive and coherent dataset. Data fusion techniques, such as image registration, sensor calibration, and geo-referencing, are employed to accurately align and amalgamate data from various sources. UAVs, equipped with high-resolution cameras and advanced sensors, can capture aerial imagery, generating accurate topographic maps, digital surface models, and orthophotos (Nex & Remondino, 2014). Furthermore, UAVs, by tracking real-time module movement, can optimize transportation routes, identify potential bottlenecks, and boost overall logistics efficiency (Li et al., 2022).
For example, in the case of steel structure construction in Changshu City, the integration of BIM and UAV for lifting operation planning and construction monitoring helps to optimize lifting plans, improve construction safety and efficiency (Tian et al., 2021). The workflow of using UAVs to take photos of the construction site, then generating a 3D model through photogrammetric techniques, and comparing it with the 4D BIM model to monitor the construction progress has been proved to be a better way compared with traditional existing methods (Pizarro & Soto, 2021). UAV-assisted systems have been developed for lifting and positioning lightweight building components such as roof insulation panels and glass panels (Perez-Grau et al, 2021). As UAV technology and payload capacities progress, UAVs could assume a more substantial role in the assembly process of prefabricated construction. The integration of UAVs in prefabricated construction thus offers considerable benefits in terms of efficiency, quality control, and safety. As UAV technology advances, its applications in the construction industry are expected to broaden, revolutionizing the design, manufacture, and maintenance of prefabricated buildings.
3 Fabrication methodology of single-layer 3d printing panels
3.1 Design-to-fabrication workflow based on the FUROBOT platform
In the digital era, the design-to-fabrication workflow employs digital technologies and tools to augment the accuracy and efficiency of the entire process, from design through to manufacturing. This workflow aspires to transform innovative concepts into tangible products or structures, fostering robust collaborations among designers, manufacturers, and builders via digital technologies. The objective is to facilitate swifter, more accurate manufacturing procedures.
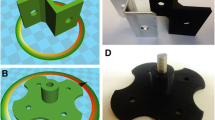
FUROBOT, a potent robotic programming software platform rooted in Grasshopper, provides designers from various fields an intuitive means of programming industrial robots. This platform strays from traditional dialog interfaces of robotic control systems, instead embracing a node-based programming approach, inspired by the parametric control mode of Grasshopper (Fig. 2). The bulk of its parameter information is relayed via node input and output, thereby enhancing the efficiency of parametric programming for architects (Fig. 3). Furthermore, it is compatible with various robot types and integrates an array of technique toolkits (Fig. 4). This digital tool can directly transmit design model data to robotics, adaptively ensuring fabrication precision and efficiency. In the realm of interaction and visualization during the construction process, FUROBOT assists architects in monitoring the entire fabrication process to maintain consistency and accuracy. Moreover, its collision detection feature can rapidly identify and rectify any singularity in the robot arm's printing trajectory, thereby guaranteeing the success rate and quality of construction.

Node-based programming software

FUROBOT parametric operation interface

Multiple types of robots integrated in FUROBOT
The motion planning rule for 6-Axis robotic arms dictates that the tool head coordinates move at spatial points, deduced from the kinematic solutions algorithm integrated into FUROBOT. The subsequent three steps outline the 3D printing workflow with trajectory optimization following the input of the 3D design model.
Step 1: Select Breps in Rhino, allowing Grasshopper to set 3D models.
Step 2: Employ FUROBOT's core to simulate the printing trajectory from the sliced contour lines, based on parametric fabrication parameters.
Step 3: Perform collision and singularity checks.
3.2 Robotic 3D printing hardware system and material performance
The robotic 3D printing hardware system can be separated into three core constituents: the material preparation system, the robotic extrusion system, and the post-processing system. The material preparation system, tasked with dosing, drying, and feeding the print material, initiates the process. The material is then ground by a screw extruder and extruded via a tool head with customized geometry and dimensions. To facilitate optimal printing, a quintuple-layer base is preemptively printed to level the surface, a strategy derived from prior project experiences. The printing process is subsequently passed to the robot via an offline program with an assigned number. After printing, the components undergo cutting and polishing to meet the necessary standards for the engineering project. Figure 5 offers a comprehensive overview of the hardware system and workflow for robotic 3D printing.

Detailed robotic 3D printing hardware system and workflow
ABS, as a relatively low-cost and highly malleable raw material, offer considerable advantages in fabricating complexly shaped components. However, due to the inconsistent performance levels of plastics at present, their utilization in engineering projects remains confined to small-scale architecture. In this project, we introduce a fibre-reinforced polymer-based composite material to examine the long-term utility of modified plastics as fundamental constituents of the building. Recent research suggests that integrating fibre-reinforced composites into the 3D printing process can markedly enhance the tensile strength of printed components (Iragi et al., 2023). Similarly, Zhou and Chen (2018) assert that 3D printing of carbon fibre reinforced plastics via Fused Deposition Modelling (FDM) and Selected Laser Sintering (SLS) results in lightweight components exhibiting superior efficiency and intricate structuring. To determine the scientific rigidity and linear expansion coefficient, we propose a material performance test, the detailed results of which are delineated in the Table below.
The Table's data indicates that the tensile and bending strength of the composite material amplified considerably following the inclusion of glass fibre reinforcement (15 wt%). This modification to the material's stiffness augments its resistance to deformation caused by internal material stress during the printing process. Additionally, the linear expansion coefficient witnessed a significant reduction post the integration of glass fibre reinforcement, thus diminishing deformation and thermal shrinkage. These outcomes suggest that 3D printed fibre-reinforced plastic exhibits superior mechanical properties compared to ABS. The incorporation of fibres into the polymer matrix enhances the composite material's overall strength, stiffness, and durability, making it an ideal material for load-bearing and structural applications within construction engineering.
3.3 Fabrication optimization in the scenario of mass customization
Contrasting small-scale production, mass customization within prefabricated building projects necessitates exceptional stability and production efficacy in the fabrication process, coupled with high component yield rate. Within the 3D printing sector, research highlights that optimization techniques for both curved and planar components, alongside the application of multi-degree-of-freedom devices, present considerable challenges to the architectural industry. More specifically, trajectory optimization can augment surface quality, curtail the necessity for support structures, and enhance isotropy (Guamán-Rivera et al., 2022). Owing to the anisotropy of 3D printed components, localized reinforcement becomes imperative when utilizing this three-dimensional composite structure as large-scale components, to assure stability when printing to a defined height (Safonov, 2019). The antecedent double-layer printing methodology encountered issues such as protracted printing time, excessive component weight, and installation errors precipitated by undue rigidity in the context of large-scale mass construction. Consequently, in this project, we propose an innovative single-layer panel printing method to address these challenges. Generally, the layer change point for a two-layer printed element entails dividing the closed curve of each layer and connecting the adjacent curves. A single-layer component typically adheres to an open, unidirectional round-trip curve (Figs. 6 and 7). Additionally, the joints of single-layer components can be enhanced to account for fabrication tolerances on the top after printing is complete. Overall, the single-layer printing process emerges as a more simplified and efficient production method for mass customization contexts. However, due to inadequate stiffness, single-layer panels risk instability and collapse when printed above 500 mm. Therefore, we incorporated a folding structure to safeguard stability during the printing process (Fig. 8). These patterns more efficaciously distribute loads, alleviating local buckling risks and bolstering the overall stability of the panel. Ultimately, this structure ensures that each single-layer panel can be printed up to a height of 2 m.

Material performance of ABS and fiber-reinforced ABS

Single-layer 3D printing panel trajectory optimization for enhancing stiffness

Printing path of a single-layer panel
Via finite element analysis, the maximum stress of a single component is 10.27mPa, markedly less than 49.5mPa (test value), thus satisfying the design requirements. The maximum displacement deformation is 9.36mm < l/100, thereby also conforming to the design specifications (Fig. 9).

Von mises stress and displacement analysis
Another significant hurdle in utilizing robotics for expansive engineering projects is the capability to generate offline programs for fabrication, which starkly contrasts with the existing approach of small-scale 3D printing and can be both time-consuming and costly. For instance, a project comprising over 4,000 roof components of varying geometries (Fig. 10) would render manual programming impracticable within the stipulated project timeline. To counter this issue and secure an efficient production workflow, two critical steps, automated print component pickup and programming, coupled with robot motion simulation, were undertaken. Within the project, an automated program grounded in FUROBOT was devised, generating printing files every 30 s while concurrently checking for collision and singularity (Fig. 11). Through this seamless digital-to-fabrication workflow, all 4,000 printing files were prepared within a span of five days, successfully adhering to the production deadline.

Over 4,000 roof panels with different geometries

Automatic printing file generation module
4 Construction practice
4.1 Real-time UAV positioning and multidimensional data coupling
In this project, we employed UAV positioning technology to aid in constructing a digital twin in Rhino. This technology can accurately ascertain location while concurrently collating, integrating, and analyzing a variety of data from diverse sources (Fig. 12). Due to the inherent thinness of single-layer panels, we batch export the parameters of the four corners of each panel prior to construction. The exported data is then filtered and batch imported into the RTK for initial construction positioning. During this process, the model's coordinate system is coupled with the actual construction coordinate system. Figure 13 shows printed panels coordinate information for one area. In construction phase, we integrate and analyse on-site construction information in Rhino daily to acquire the installation accuracy error of each printing panel. This process enables precise adjustments to be made ahead of the subsequent day's installation (Fig. 14). Specifically, with the assistance of UAV positioning technology, we can preselect panels from areas with excessive installation errors for manual cutting on-site at the bottom. Given that the slotted lap joint allows for a significant amount of adjustment for each adjacent panel, this can significantly reduce the precision requirements for manual cutting on site, achieving a flexible and predictable monitoring of the construction workflow. Therefore, real-time UAV positioning and multidimensional data coupling are crucial technologies for numerous UAV-based applications, offering accurate positioning, comprehensive data collection, and real-time analysis to aid informed decision-making and efficient operations.

Real-time UAV positioning and multidimensional data coupling

Component positioning information table

UAV positioning accuracy perception and real-time feedback adjustment during construction
4.2 Flexible panel division system
While 3D printing can provide freedom in design, its various forms pose a significant installation and construction challenge. Utilizing the conventional method of roof construction positioning could have triggered cumulative tolerance during successive installations, potentially culminating in the failure to secure the head and tail panels. In response to this potential issue, we opted to use a single layer of slotted lap joints (Fig. 15), wherein each panel exhibits a partial overlap with its adjacent panels on one upper and side surface, permitting adjustments within a 1 cm range. Diverse slotted lap joints were conceptualized and installed, drawing from the conventional concept of tile-type installation (Fig. 16), with the control parameters for each detail amenable to adjustments based on specific circumstances. This parametric design methodology affords the architect increased direct control over the project. With regard to fabrication, the base robot used for 3D printing, KUKA R2700-210, caps the length and height of each panel at 2 m. Nevertheless, due to the substantial variance in the roof's form at its broadest and narrowest points (Fig. 17), a panel division system was engineered to accommodate panels of all sizes and scales. Accounting for these factors allowed us to install and position the 3D printed components with precision, achieving the desired outcome for the project.

Slotted lap joints

Tile type installation concept

Form with high geometric contrast
In our endeavor to ensure successful and efficient 3D printing, we confined the height of 80 percent of the panels to 1.8 m by modifying the range of UV subdivision lines on the surface. We divided each printed panel into two sections for the inevitable oversized panels and incorporated folded edges at the joints to ensure structural stability. Based on model statistics, this panel division strategy was applied to an additional 800 panels. Once the size of each panel was established, we began categorizing them into distinct types in accordance with the installation sequence: regular panels, ridge panels, slit panels, cornice panels, and collision panels (Fig. 18). These panels exhibit unique joint details due to their distinctive properties. For example, the ridge panel situated at the roof's peak lacks a groove on its side, distinguishing it from the standard slab. To realize a smooth geometry for the entire roof, the side edges of the cornice panel were provided with an extra folded edge. Slit panels were installed subsequently to guarantee that construction errors were evenly distributed across each area. Collision panels were situated around skylights and patios, each bearing entirely different dimensions and shapes due to their intersection with the roof steel structure. By discriminating and categorizing the panels, we optimized the installation process and came up with a promising result.

Different types of panels
4.3 Construction process for precision and accuracy control
In non-uniform prefabricated construction, the implementation of adjustable connection techniques and divisible installation processes, including oblique support and bolt connection, is indispensable. These methods can be adjusted during installation to minimize the propagation of errors. The Chengdu Agricultural Expo Centre incorporates a layer-by-layer tolerance eradication strategy during the construction process, as depicted in Fig. 19. The roof system comprises a central timber reciprocal structure, Oriented Strand Board (OSB), SPF wood keel, adjustable metal joints, and 3D printed panels. This assembly mitigates potential tolerance issues arising during construction. The adaptable system is installed and positioned through a series of steps (Fig. 20). Firstly, following the erection of the primary timber structure, a through-length SPF keel is installed utilizing the head and tail endpoints via Real-time Kinematic (RTK) positioning. Secondly, an array of L-shaped metal connections is affixed to the keel, following the distance derived from the digital model, to accommodate the non-standardized distance between the panel and the SPF keel. Each metal connection, coupled with the SPF keel width, can offset up to 8 cm of construction tolerance. Lastly, the printed panels are sequentially installed in a zoned approach according to the position of the connections (Fig. 21). This process demonstrates that the logical organization of construction, optimization of installation sequence and methodologies, synergized with cutting-edge UAV positioning feedback technology, can substantially reduce rework caused by the cumulative error during the installation process.

Roof structural axonometric drawing

Roof construction process

Installation sequence of Single-layer 3D printing panel
5 Discussion
5.1 Feasibility of single-layer 3D printing panels with UAV positioning technology
The holistic 3D printing workflow and digital construction methodologies demonstrated in this paper have been effectively implemented and verified through the Chengdu Agricultural Expo Centre project. The versatility of 3D printing technology facilitates the proficient fabrication of panels boasting custom designs and geometries, accommodating distinctive client stipulations and architectural aesthetics. This adaptability is increasingly pertinent in contemporary construction spheres where customized solutions and responsive building designs are in high demand. The project harnessed digital tools and fabrication platforms, realizing an efficient, integrated design-to-fabrication system encompassing form generation, single-layer panel division, robotic 3D printing, and on-site construction. The application of single-layer panels enabled a reduction in printing time, diminished transportation expenses, and the deployment of efficient, expedited installation techniques, significantly curtailing the carbon footprint throughout the building life cycle. With the FUROBOT core module, architects can directly program 3D printing operations and autonomously complete the offline program for robot control. This process, transferred from the production supervisor to the robot in the digital factory, results in a seamless, intuitive interface bridging design and construction. Designers have access to real-time production quality feedback, fostering optimization of future designs. This efficient, prefabricated approach accommodates mass customization scenarios, ensuring timely project completion. Ultimately, ten industrial 3D printing robots operating in a digital factory prefabricated the project, generating over 4,000 uniquely shaped and sized panels in three months.
UAV positioning technology incorporation assures accurate alignment and assembly of 3D printed panels, enhancing structural performance and facilitating complex, innovative designs that may be challenging with conventional construction techniques. This amalgamation of technology bolsters design freedom and broadens the prospects for generating distinctive, customized structures. The entire 3000 square meter hyperbolic roof was constructed through on-site calibration of 50 points using drones. Equipped with cameras and sensors, drones swiftly scan the building's structural layers and world coordinate system to collect installation data and surrounding environmental information. Utilizing the gathered data, a drone executes 3D point cloud modeling, and the subsequent model is compared with the design model. Through the integration of multidimensional data and the utilization of a digital twin model, the precise installation position of each panel and any existing installation errors can be accurately identified. Under this construction protocol, the ultimate installation error of each panel was maintained within 5 mm, demonstrating the broad future applicability of this efficient, intelligent installation method for large-scale, irregular building components.
6 Limitations
Despite the compelling benefits, the outlined workflow is not devoid of limitations. It presupposes a robust comprehension of craft and fabrication within architects, thereby elevating the competency requirements within the architectural field. Furthermore, despite Grasshopper's integration of FUROBOT, project-specific operations still demand extensive manual programming, underscoring the necessity for traditional architectural competencies. To ameliorate these challenges, future software interaction developments could focus on designing more intuitive, graphically based toolkits predicated on diverse 3D printing techniques. Encapsulating each manual step within a module could significantly enhance design and fabrication efficiency. However, the prevalent human–machine collaboration approach precipitates surplus material waste during digital fabrication, necessitating the development of strategies for defective product reuse. According to project-specific data, roughly 15% of panels require a tilting base to ensure optimal print quality. Meanwhile, errors readily identifiable in the Rhino viewport, such as discontinuous tool paths, result in further material waste and diminish the finished product rate. Future endeavors could mitigate these issues substantially through the amplification of intelligent and automated applications.
Moreover, as 3D printing machines employ software such as 3D CAD for mould-free component shape creation by measuring each product's cross-section with a fixed layer height, this digital automation may undermine the benefits of small batch production in low-wage countries (Berman, 2012). Additionally, the adoption of automation and robotics, including 3D printing, might induce job displacement in lower-wage countries. Despite these concerns, a significant chasm remains before entering the era of large-scale production, primarily due to the incomplete supply chain for 3D printing materials. Consequently, it cannot supplant existing fabrication processes entirely. A case study from the MIT Technology Review on the implications of 3D printing for mass production proposed that embedding 3D printing within existing supply chain networks necessitates comprehensive collaboration and innovation. Hence, the integration of innovative designs such as open platforms and efficient data management could present a viable pathway for incorporating 3D printing technology into the era of the digital supply chain (Chan et al., 2018).
7 Conclusion
In summary, this paper demonstrated an integrated large-scale mass customization 3D printing strategy, utilizing the FUROBOT platform, industrial 6-axis robotics, and fiber-reinforced plastic. Leveraging these software and hardware platforms, the study proceeded to articulate a 3D printing construction methodology, with empirical evidence derived from the Chengdu Agricultural Expo Centre project. Within this workflow, the fundamental form was generated and refined within Rhino and Grasshopper, with initial geometry computations influenced by specific environmental conditions. Subsequently, the roof was segmented into distinct primary areas, predicated on construction scenarios, with UV direction governing panel dimensions. The FUROBOT subsequently transmitted model information into the robot path for 3D printing, culminating in the assembly of diverse panels, according to a pre-ordained sequence via a flexible structural system. In the context of this project, the advocated workflow fosters a seamless design-to-fabrication methodology, grounded in 3D printing craft, thereby facilitating sustainable production practices. The amalgamation of 3D printing and UAV technology advantages propels a transformative opportunity for digital fabrication and construction processes, significantly enhancing manufacturing efficacy and installation accuracy. This proposed methodology tackles critical challenges endemic to traditional construction methods, such as material wastage, labor costs, and construction duration, while simultaneously augmenting design versatility and structural performance. The application of UAV positioning technology assures precise placement and assembly of 3D printed panels, thereby minimizing human intervention and enabling the execution of tasks that would traditionally be deemed hazardous or challenging.
Despite the significant potential and promising outcomes of our methodology, several challenges and limitations need to be addressed in future research. These include advancements in UAV positioning systems, refinement of 3D printing techniques pertinent to large-scale construction, and a comprehensive evaluation of the long-term performance and durability of single-layer 3D printed panels. Moreover, exploratory research is imperative to investigate the synergy of this methodology with emergent technologies, such as robotics and automation, and its adaptability to diverse construction contexts and requirements. Future research could concentrate on the development of a comprehensive plastic printing toolkit, leveraging accumulated data and parameters, to usher in a more diverse project portfolio of superior quality. Predictable research trajectories could encompass exploration of reusable and extrudable materials, online robot programming modules for 3D printing, and craft toolkits. The construction of architectural ontologies predicated on the aforementioned technologies has engendered novel opportunities for individuality and diversity. This innovative production system weaves an integrative design and construction process, presenting architects with opportunities for deeper involvement in the architectural production process. Capitalizing on the synergies between 3D printing and UAV technologies, this approach could bolster the evolution of efficient, sustainable, and tailored building solutions, ultimately fostering a resilient and adaptable built environment.
Availability of data and materials
Not applicable.
References
Alonso Madrid, J., Sotorrío Ortega, G., Gorostiza Carabaño, J., Olsson, N. O., & Tenorio Ríos, J. A. (2023). 3D Claying: 3D Printing and Recycling Clay. Crystals, 13(3), 375.
Azhar, S. (2011). Building information modeling (BIM): Trends, benefits, risks, and challenges for the AEC industry. Leadership and Management in Engineering, 11(3), 241–252.
Bañón, C., & Raspall, F. (2022). 3D printing floating modular farms from Plastic Waste. Materials Today: Proceedings, 70, 560–566. https://doi.org/10.1016/j.matpr.2022.09.591
Berman, B. (2012). 3-D printing: The new industrial revolution. Business Horizons, 55(2), 155–162. https://doi.org/10.1016/j.bushor.2011.11.003
Beyhan, F., & Arslan Selçuk, S. (2018). 3D printing in architecture: One step closer to a sustainable built environment. In Proceedings of 3rd International Sustainable Buildings Symposium Volume 13 (pp. 253–268). Springer International Publishing.
Chan, H. K., Griffin, J., Lim, J. J., Zeng, F., & Chiu, A. S. F. (2018). The impact of 3D Printing Technology on the supply chain: Manufacturing and legal perspectives. International Journal of Production Economics, 205, 156–162.
Christen, H., van Zijl, G., & de Villiers, W. (2023). Improving building thermal comfort through passive design – An experimental analysis of phase change material 3D printed concrete. Journal of Cleaner Production, 392, 136247. https://doi.org/10.1016/j.jclepro.2023.136247
Craveiro, F., Duarte, J. P., Bartolo, H., & Bartolo, P. J. (2019). Additive manufacturing as an enabling technology for digital construction: A perspective on Construction 4.0. Automation in Construction, 103, 251–267.
Delgado Camacho, D., Clayton, P., O’Brien, W. J., Seepersad, C., Juenger, M., Ferron, R., & Salamone, S. (2018). Applications of additive manufacturing in the construction industry – A forward-looking review. Automation in Construction, 89, 110–119.
Gebhard, L., Mata-Falcon, J., Iqbal, A., & Kaufmann, W. (2023). Structural behaviour of post-installed reinforcement for 3D concrete printed shells – A case study on water tanks. Construction and Building Materials, 366, 130163.
Ghasemieshkaftaki, M., Ortiz, M. A., & Bluyssen, P. M. (2021). An overview of transparent and translucent 3D-printed façade prototypes and technologies. Paper presented at Healthy Buildings Europe 2021 Online Conference, Trondheim, Norway.
Gheisari, M., & Irizarry, J. (2015). Investigating human and technological requirements for successful implementation of a BIM-based mobile application in facility management practices. Journal of Information Technology in Construction (ITcon), 20(19), 291–312.
Guamán-Rivera, R., Martínez-Rocamora, A., García-Alvarado, R., Muñoz-Sanguinetti, C., González-Böhme, L. F., & Auat-Cheein, F. (2022). Recent Developments and Challenges of 3D-Printed Construction: A Review of Research Fronts. Buildings, 12(2), 229. https://doi.org/10.3390/buildings12020229
Iragi, M., Pascual-González, C., Esnaola, A., Morales, U., Aurrekoetxea, J., Lopes, C. S., & Aretxabaleta, L. (2023). Design, manufacturing and testing of 3D printed variable-stiffness laminates for improved open-hole tensile behaviour. Additive Manufacturing, 63, 103418. https://doi.org/10.1016/j.addma.2023.103418
Kamel, E., & Kazemian, A. (2023). BIM-integrated thermal analysis and building energy modeling in 3D-printed residential buildings. Energy and Buildings, 279, 112670. https://doi.org/10.1016/j.enbuild.2022.112670
Khoshnevis, B., Yuan, X., Zahiri, D., & Zhang, W. (2016). Construction by contour crafting using sulfur concrete with planetary applications. Rapid Prototyping Journal, 22(6), 848–856.
Kumar, R., Singh, R., & Farina, I. (2018). On the 3D printing of recycled ABS, PLA and HIPS thermoplastics for structural applications. PSU Re-Search Review, 2(2), 115–137.
Li, Y., Liu, M., & Jiang, D. (2022). Application of Unmanned Aerial Vehicles in Logistics: A Literature Review. Sustainability, 14(21). https://doi.org/10.3390/su142114473
Lim, S., Buswell, R. A., Le, T. T., Austin, S. A., Gibb, A. G., & Thorpe, T. (2012). Developments in construction-scale additive manufacturing processes. Automation in Construction, 21, 262–268.
Marijnissen, M. P. A. M., & Van Der Zee, A. (2017). 3D Concrete printing in architecture. A research on the potential benefits of 3D Concrete Printing in Architecture. In Proceedings of the 35th International Conference on Education and Research in Computer Aided Architectural Design in Europe (eCAADe), 2, 299–308
Mitchell, A., Lafont, U., Hołyńska, M., & Semprimoschnig, C. (2018). Additive manufacturing — A review of 4D printing and future applications. Additive Manufacturing, 24, 606–626.
Molina, A. A., Huang, Y., & Jiang, Y. (2023). A Review of Unmanned Aerial Vehicle Applications in Construction Management: 2016–2021. Standards, 3(2), 95–109. https://doi.org/10.3390/standards3020009
Munn, S., & Soebarto, V. (2004). The issues of using recycled materials in architecture. In The 38th international conference of architectural science association ANZAScA “Contexts of architecture”, Launceston, Tasmania.
Nex, F., & Remondino, F. (2014). UAV for 3D mapping applications: A review. Applied Geomatics, 6(1), 1–15.
Paolini, A., Kollmannsberger, S., & Rank, E. (2019). Additive manufacturing in construction: A review on processes, applications, and digital planning methods. Additive Manufacturing, 30, 100894. https://doi.org/10.1016/j.addma.2019.100894
Perez-Grau, F. J., Martinez-de Dios, J. R., Paneque, J. L., Acevedo, J. J., Torres-González, A., Viguria, A., Astorga, J. R., & Ollero, A. (2021). Introducing autonomous aerial robots in industrial manufacturing. Journal of Manufacturing Systems, 60, 312–324. https://doi.org/10.1016/j.jmsy.2021.06.008
Pine, B. J. (1993). Mass customization: The new frontier in business competition. Harvard Business School Press.
Pizarro, C., & Soto, C. (2021). Monitoring the physical progress of construction sites using UAVs and photogrammetry1. Buildings, 11(9), 393. https://doi.org/10.3390/buildings11090393
Rael, R., & San Fratello, M. (2014). Printing architecture: Innovative recipes for 3D printing. Princeton Architectural Press.
Safonov, A. A. (2019). 3D topology optimization of continuous fiber-reinforced structures via natural evolution method. Composite Structures, 215, 289–297. https://doi.org/10.1016/j.compstruct.2019.02.063
Sarakinioti, M. V., Turrin, M., Konstantinou, T., Tenpierik, M., & Knaack, U. (2018). Developing an integrated 3D-printed façade with complex geometries for active temperature control. Materials Today Communications, 15, 275–279. https://doi.org/10.1016/j.mtcomm.2018.02.027
Schodek, D., Bechthold, M., Griggs, J. K., Kao, K., & Steinberg, M. (2004). Digital Design and Manufacturing: CAD/CAM Applications in Architecture and Design. Wiley.
Suiker, A. S. J., Wolfs, R. J. M., Lucas, S. M., & Salet, T. A. M. (2020). Elastic buckling and plastic collapse during 3D concrete printing. Cement and Concrete Research, 135, 106016. https://doi.org/10.1016/j.cemconres.2020.106016
Tian, J., Wang, Y., Zhang, J., & Li, H. (2021). Application of BIM and UAV in steel bridge construction: A case study1. Advances in Civil Engineering, 2021, 1–14. https://doi.org/10.1155/2021/6672849
Yang, Z., Yu, X., Dedman, S., Rosso, M., Zhu, J., Yang, J., Xia, Y., Tian, Y., Zhang, G., & Wang, J. (2022). UAV remote sensing applications in marine monitoring: Knowledge visualization and review. Science Total Environment, 838(Pt 1), 155939. https://doi.org/10.1016/j.scitotenv.2022.155939
Yuan, P. F., Zhou, X., Wu, H., Zhang, L., Guo, L., Shi, Y., Lin, Z., Bai, J., Yu, Y., & Yang, S. (2022b). Robotic 3D printed lunar bionic architecture based on lunar regolith selective laser sintering technology. Architectural Intelligence, 1(14). https://doi.org/10.1007/s44223-022-00014-9
Yuan, P. F., Beh, H. S., Yang, X., Zhang, L., & Gao, T. (2022a). Feasibility study of large-scale mass customization 3D printing framework system with a case study on Nanjing Happy Valley East Gate. Frontiers of Architectural Research, 11, 670–680. https://doi.org/10.1016/j.foar.2022.05.005
Zhou, W., & Chen, J. (2018). 3D Printing of Carbon Fiber Reinforced Plastics and their Applications. Materials Science Forum, 913, 558–563. https://doi.org/10.4028/www.scientific.net/MSF.913.558
Żur, P., Kołodziej, A., Baier, A., & Kokot, G. (2020). Optimization of Abs 3D-printing method and parameters. European Journal of Engineering Science and Technology, 3(1), 44–51.
Acknowledgements
Not applicable.
Funding
National Natural Science Foundation of China (Grant No. U1913603) Shanghai Municipal Science and Technology Major Project (Grant No. 2021SHZDZX0100) and the Fundamental Research Funds for the Central Universities.
Author information
Authors and Affiliations
Contributions
The author(s) read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Author Philip F. YUAN is a member of the Editorial Board for Architectural Intelligence and was not involved in the journal’s review of or decisions related to this manuscript.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yuan, P.F., Gao, T., Gu, S. et al. Methodology of fabricating 3D printing modified plastic single-layer panels with UAV positioning technology in the era of mass customization. ARIN 2, 15 (2023). https://doi.org/10.1007/s44223-023-00037-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44223-023-00037-w