
Abstract
Direct thrust measurements have been performed on a low-power (30 W) ECR plasma thruster operated with xenon. The total thrust, the force exerted on the walls of the source (thermal thrust), and the force exerted on the permanent magnet (magnetic thrust) have been measured separately for various operating conditions (power and flowrate). The results are compared for two magnetic field topologies (with a different magnetic field gradient and divergence). The magnetic thrust dominates thermal thrust for most operating conditions, and its contribution to total thrust can be as high as 80%. A saturation of magnetic thrust with increasing power has been observed and is correlated with a decrease in thrust efficiency. A high degree of electron anisotropy can be inferred from the thrust measurements.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
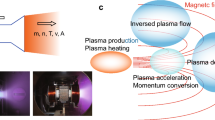
Electrodeless magnetic nozzle thrusters have received a great deal of attention these last few years for their ability to produce thrust without the need of an external cathode neutralizer, the possibility to work with various propellants (including reactive gases like water vapor [1, 2] or other molecular propellants [3], and the theoretically lower wall erosion in the plasma source. The principle of the magnetic nozzle (MN) is the conversion of the gyrokinetic energy of charged particles (i.e., perpendicular to the direction of the magnetic lines) into parallel energy (i.e., along the direction of the magnetic lines). Most of electrodeless thrusters use an electron-driven magnetic nozzle: only electrons are magnetized and undergo conversion of their gyrokinetic energy, whereas the ions are accelerated by the ambipolar electric field resulting from the difference in mobility between electrons and ions.
Because of the high complexity of electron-driven MN physics, there is still a low understanding of the parameters (geometry, magnetic field topology) that could help improve MN thrusters performance. In particular, there is a lack of experimental observation of phenomena like electron energy anisotropy due to strong magnetic fields (from 0.1 to 1 kG), whereas it is considered a key parameter for describing plasma expansion in a magnetic nozzle and the production of thrust. Several theoretical works have investigated the thrust production mechanisms in MN thrusters [4,5,6,7,8]. These works have shown that the thrust has two main contributions: the pressure (thermal) and the magnetic thrust. The thermal thrust (\({T}_{S}\)) is a surface force due to the electron pressure exerted on the backwall of the thruster. The magnetic thrust (\({T}_{B}\)) is due to the Lorentz force exerted on the externally applied magnetic field. \({T}_{B}\) is a volume force exerted on the whole plasma volume, including the plume, due to the interaction between the diamagnetic electron current and the externally applied magnetic field.
Experimental measurements of electron pressure thrust components \({T}_{B}\) and \({T}_{S}\) on a helicon thruster have been compared with a full 2D analytical model [6] and a 1D analytical paraxial model [9]. The magnetic thrust increases with the magnetic field strength, and \({T}_{B}\) contribution to total thrust can be as high as 50%. A good agreement has been found globally between measurements and the models. The accuracy of the 1D paraxial model tends to decrease when the radial variations of the magnetic field are important. In those works, direct measurements of the electron temperature and density allow for the separate computation of the magnetic and thermal contributions. It should be noted that the electron temperature is considered isotropic (\({T}_{e,\perp }={T}_{e,\parallel }\)) in these works.
The electron cyclotron resonance (ECR) plasma thruster is an electrodeless MN thruster that uses microwave power to ionize the gas and heat the electrons. ECR thrusters are characterized by a high magnetic field strength in the resonance region (~ 1 kG) and a different electron heating process than in helicon thrusters: the energy is initially injected mainly in the gyrokinetic mode. This heating mode introduces anisotropy in the electron energy distribution function, such that \({T}_{e,\perp }>{T}_{e,\parallel }\) is expected in the electron population, at least inside the discharge chamber.
These features are favorable for the production of thrust with good efficiency. First, the higher magnetic field intensity improves the confinement and reduces the losses on the walls of the source. Second, the gyrokinetic energy mode enhance the number of ionizing collisions before the electrons escape from the source or are lost at the walls. Third, the magnetic mirror configuration converts perpendicular electron energy into parallel electron energy preferentially directed toward the thruster exit.
Recently, numerical results obtained with a self-consistent 2D hybrid code (particle in cell for heavy species and fluid for electrons) have been implemented by Sanchez-Villar et al. [10] on an ECR thruster. In their model, plasma temperature is isotropic, and the large parallel electron conductivity results in almost isothermal electrons along magnetic lines. The authors found that the magnetic thrust accounts for approximately 60% of the total axial momentum at 2 sccm and 27 W of absorbed power, in line with experimental results reported by Vialis et al. [11] at 2 sccm and 40 W.
In the present work, an experimental investigation of the thrust production mechanisms is carried out on a low-power ECR plasma thruster operated with xenon. Direct measurements of the total thrust, the force exerted on the plasma source, and the force exerted on the permanent magnet have been performed with a thrust balance. Two different magnetic field topologies (with a different divergence) have been studied. The contribution of \({T}_{B}\) and \({T}_{S}\) to total thrust and thruster performances are investigated as a function of the operating parameters (mass flow rate and microwave power).
Apparatus
ECR thruster
The thruster investigated is the electron cyclotron resonance (ECR) plasma thruster that has been developed at ONERA since 2010 [11,12,13,14]. The originality of this thruster is its coaxial geometry that allows a compact geometry (27 mm diameter) while being operated with microwaves at frequencies of 2.45 GHz. The ECR thruster version characterized in this work is the 30 W model, shown in Fig. 1. The plasma source is 20 mm long and consists of an inner rod (2.3 mm in diameter) and an outer cylinder (27.5 mm in diameter). The end of the source is closed with a boron nitride (BN) disk (transparent to microwaves) that prevents the plasma from eroding the coaxial microwave transmission line. The propellant gas is injected into the source with two alumina tubes (1 mm diameter) through the BN backplate. In this study, only xenon was used for the experiments. This thruster version has been chosen for its good stability and repeatability [15, 16]. Similar versions of the thruster have already been used in previous works performed at ONERA [11, 13, 14].

Schematics of ECR thruster (left) and views of 30 ECR model (right: operated with xenon)
The magnetic field is provided by an annular permanent magnet located at the back of the plasma source. Two different magnetic field configurations (called BM and SM) have been used for this study. The topology of the magnetic field lines in the source and the magnetic nozzle is shown in Fig. 2. The position of the resonance region (around 875 G) with respect to the backplate is similar for both configurations. However, the BM configuration displays a more divergent magnetic field, hence a steeper magnetic field axial gradient: \(\frac{\partial B}{\partial z}\) in the source is about 1.5 times higher for configuration BM than for configuration SM.

Topology of the magnetic field lines for the magnetic configurations SM and BM
The thruster is powered by a Microwave Amp Ltd amplifier driven by a VAUNIX LMS-402D signal generator. The forward and reflected power (to the thruster) are measured with two LB478A (Ladybug technologies) calibrated power sensors using directional couplers. The reflected power is dissipated through a 50 Ω load. The transmission line is characterized (in terms of power losses) with a vector network analyzer before the experiments so that the deposited power absorbed by the plasma can be computed. At large flowrates (1, 1.5, and 2 sccm), reflected power remains below 4% of incident power for all tested microwave power. At 0.7 sccm, a higher reflected power is observed, but values are always less than 10%. Uncertainty of the absorbed power is around 10–20% for the measured values of reflected power [13].
The thruster body and the inner rod are electrically floating, so the plasma plume remains current-free.
Thrust balance
The total thrust and the magnetic and thermal components of the thrust are measured using the ONERA milli-newton thrust balance. This balance, which is described in detail in [11], is a vertical pendulum of compound type with a quasi-frictionless pivot (see Fig. 3). The thruster is mounted at the end of the pendulum arm, on which it applies a horizontal force. In the free pendulum mode, the arm moves from its initial position to a new, tilted equilibrium position, where the torques exerted by the thrust and by the weight of the pendulum arm cancel each other. The angle of the pendulum is then a linear measure of the thrust, given that the angle is usually very small (< < 1 degree).

Schematics (left) and view of the thrust balance (right)
Two displacement sensors are placed on the pendulum arm: one is an accelerometer (Honeywell QA 700) for which the axis measures gravity projection; the other is a capacitive sensor (Focale MC 900) that measures the linear displacement of the arm.
A coil actuator is placed at the bottom of the pendulum. It consists of a permanent magnet fixed on the arm near a planar coil placed on the vacuum tank. A force is applied on the arm when making a current flow through the coil. The force is proportional to the current since the movement is tiny and frictionless.
Two measurement modes can be used.
-
1.
Open loop: as described above, where the pendulum is free to move.
-
2.
Closed loop: a feedback loop uses the coil actuator to maintain the pendulum at its initial equilibrium position. This mode has one clear advantage: the movement of the pendulum becomes second order. This is important if the movement is perturbed by non-linear flexure phenomena (like plastic deformation of gas tubes and cables) because these effects will be reduced dramatically.
All thrust measurements performed during this campaign were done in closed-loop mode. The current flowing through the coil actuator is controlled with a Proportional-Integrator-Derivative (PID) system. The process variable is the signal of the capacitive sensor, which is fed to the PID controller (SRS SIM960). When the thruster applies a force on the pendulum, the PID output signal is modified, and the resulting magnetic field interacts with the permanent magnet to produce a force. The output voltage from the PID controller is directly proportional to the force applied by the thruster, provided that the error value is small enough. Knowing the calibration factor, the thrust can then be measured from the PID signal.
A wireless microwave transmission technique is used on the balance. It consists of two facing coaxial-to-waveguide transitions separated by a distance of a few millimeters. This system prevents from using microwave cables that would add stiffness to the pendulum. Moreover, it allows the thruster to be electrically floating.
The pendulum balance allows an absolute and precise thrust calibration. The principle is to deposit masses on a small horizontal arm attached to the pendulum. The weights of the masses are calibrated very precisely with a Mettler Toledo balance precise to 0.01 mg. The masses are placed on a vertical translation stage and are deposited sequentially on the calibration arm, thus imposing calibrated torques on the balance.
In the past few years, ONERA milli-newton balance has been used successfully for direct thrust measurements of ECR thruster [11] as well as other low-power electric propulsion technologies: gridded ion engine [17], helicon [18], HET [19]. A method has also been developed to measure the impulsion of a pulsed thruster and applied to a vacuum arc thruster [20].
Facility and setup
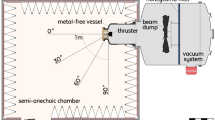
The experimental characterization of thrust production mechanisms has been performed in the B09 vacuum chamber (0.8 m in diameter, 2 m long) at the ONERA center of Palaiseau. The secondary pumping consists of three turbo-molecular pumps (Pfeiffer Hi-Pace 2300) and a cryogenic pump (Sumitomo CH-110 cryo-cooler), yielding a total pumping speed of 13 000 L/s for xenon, with a base pressure of around 2 × 10–7 mbar. In the conditions of this study (xenon flowrate between 0.7 sccm and 2 sccm), the background pressure is in the range of 1–2.6 × 10–6 mbar.
The propellant mass flowrate injected in the thruster is controlled with a Bronkhorst El-Flow controller with a full scale of 4 sccm calibrated for xenon.
For this test campaign, the thrust balance has been adapted to the B09 vacuum chamber, whose diameter is smaller than the chamber used for previous tests (1 m) [11]. To maintain the position of the thruster at the center of the vessel, the pendulum arm was shortened, which resulted in a more compact setup with the thruster being located closer to the balance structure.
Three different setups are used.
-
1.
The whole thruster assembly (coaxial cavity and permanent magnet) is mounted on the pendulum arm for total thrust measurements.
-
2.
For the measurement of the thermal thrust \({T}_{S}\) (produced by thermal expansion of electrons), the coaxial cavity (with the gas injection and the microwave transmission line) is mounted on the pendulum arm while the permanent magnet is fixed to the vessel.
-
3.
For the magnetic thrust \({T}_{B}\) measurement, the permanent magnet is mounted on the arm while the coaxial cavity is fixed to the vessel.
It should be noted that, for the second setup, the measured thrust corresponds to the total force exerted on the walls of the source, i.e., the sum of the axial force on the backplate (due to electron pressure) and the axial momentum on the cylindrical walls (due to ions). Separate measurements of these two contributions are difficult without adding a high uncertainty. The axial momentum on the cylindrical walls (termed \({T}_{w}\) in Refs. [6, 21,22,23]) is given by the ion axial momentum (\({m}_{i}{u}_{z}\)) imparted by the radial ion flux lost at the wall (\({n}_{w}{u}_{r}\)), where \({m}_{i}\) is the ion mass, \({u}_{z}\) and \({u}_{r}\) are the ion axial and radial velocity, and where \({n}_{w}\) is the plasma density at the wall. Direct measurements of the axial force on the backplate and on the radial walls have been performed by Takahashi et al. [21,22,23] on a helicon thruster. It was found that \({T}_{w}\) is not always negligible and can be almost as high as \({T}_{S}\) (and in the opposite direction) in some cases. Estimations of \({T}_{w}\) for the ECR thruster have been made using plasma density profiles and ion velocity measurements (inferred from laser induced fluorescence measurements) that are not presented here [28]. The axial velocity close to the cylinder walls is less than 1000 m/s for the investigated operating conditions. The integration of ion axial momentum on the radial walls gives a majoring estimation of \({T}_{w}\) between 10 and 30% of the measured \({T}_{S}\). The axial force on radial walls is found to be in the opposite direction to thermal thrust \({T}_{S}\), as in the works of Takahashi.
For the separate thrust measurements, special attention was paid to have the shell of the permanent magnet and the source outer cylinder electrically floating. Furthermore, they were electrically connected (with flexible wires) to be consistent with the electrical configuration of total thrust measurements. The absolute position of the resonance region with respect to the source backwall was set accurately for each mounting.
Results
The total thrust and the magnetic and thermal components have been measured as a function of microwave power (between 10 and 60 W) for different xenon mass flowrates (0.7 sccm to 2 sccm). The results obtained with configurations SM and BM are shown in Fig. 4 and Fig. 5, respectively. The error bars correspond to the uncertainty calculated with the error budget detailed in [11]. In the range of thrust levels measured in this work, the budget error is dominated by the uncertainty of the calibration coefficient. The uncertainty ranges from 4% (for thrust levels higher than 600 µN) to 8% (at 200 µN). The sum of magnetic and thermal components is also computed and used to verify the thruster repeatability when changing the balance and thruster setup. It can be seen that total thrust and the sum of \({T}_{B}\) and \({T}_{S}\) are in good agreement for all operating conditions, so the respective contributions of the two thrust components can be considered reliable for further analyses.

Total thrust \({{\varvec{T}}}_{{\varvec{T}}}\), magnetic thrust component \({{\varvec{T}}}_{{\varvec{B}}}\), and thermal thrust component \({{\varvec{T}}}_{{\varvec{S}}}\) vs. absorbed power for different xenon flowrates with magnetic configuration SM

Total thrust \({{\varvec{T}}}_{{\varvec{T}}}\), magnetic thrust component \({{\varvec{T}}}_{{\varvec{B}}}\), and thermal thrust component \({{\varvec{T}}}_{{\varvec{S}}}\) vs. absorbed power for different xenon flowrates with magnetic configuration BM
Overall, the total thrust increases with power for all xenon flowrates and the two magnetic configurations. The thrust increase rate tends to saturate above a power of 40 W, especially for the lowest flowrates. This is mainly due to the behavior of magnetic thrust. On the one hand, for all flowrates and the two magnetic configurations, the thermal thrust \({T}_{S}\) (red circles) is seen to increase steadily with microwave power. On the other hand, the magnetic thrust \({T}_{B}\) (green triangles) seems to have a limitation, especially for low flowrates (0.7 and 1 sccm). With configuration SM at 0.7 sccm, \({T}_{B}\) has a maximum value of around 355 µN at 43 W, and a further increase of power to 55 W results in a decrease of \({T}_{B}\) to 330 µN. It is noteworthy that similar maximum \({T}_{B}\) values (around 350 µN and 500 µN) are obtained with configurations SM and BM at 0.7 sccm and 1 sccm. Finally, it can be observed that the magnetic thrust and thermal thrust values are very similar with configuration BM at 1.5 sccm.
The saturation of magnetic thrust, which probably corresponds to higher power losses in the source, leads to a decrease in thrust efficiency, as shown in Fig. 6. The best thrust efficiency (5.5%) is obtained with the most divergent magnetic field configuration (BM) at low flowrate (0.7 sccm) and a microwave power of 25 W. Several operating conditions (at 0.7 sccm and 1 sccm) yield efficiency values higher than 5% for BM configuration. In comparison, the best efficiency is around 4% with configuration SM. For low flowrates, thrust efficiency displays a bell-shaped curve that is correlated with the saturation of magnetic thrust. For higher flowrates (1.5 and 2 sccm), the maximum thrust efficiency would probably be reached beyond the tested range of power. These performances are globally lower than previous results obtained in the larger vacuum chamber (length ~ 4 m), where thrust efficiencies of up to 9% have been measured [11]. The background pressure being similar in both chambers, the discrepancy is due to inevitable facility effects. First, the thruster is placed closer to the grounded structure (i.e., balance parts) than in previous experimental setups [11, 13]. Additional experiments (not presented here) have shown that the interaction of the plasma plume with lateral walls and the electrical/dielectric boundary condition plays a role in the thruster operation. The physical processes yielding such an effect are currently being investigated. Second, recent works have shown a decrease in ECR thruster performances when the test chamber length is reduced from 7 m to 1.7 m (~ length of the B09 vacuum chamber) [24]. The influence of background pressure and facility effects on ECR thruster performance is discussed in Ref. [16]. In optimum testing conditions, the thrust efficiency is seen to increase significantly [16].

Thrust efficiency vs. absorbed microwave power for the magnetic configurations SM and BM
The contribution of magnetic thrust component to total thrust is shown in Fig. 7. For a given flowrate, the fraction of magnetic thrust is globally higher with SM configuration (up to 80%) than with BM configuration (maximum around 70%) despite the higher magnetic field divergence of BM. Generally, the contribution of \({T}_{B}\) decreases when increasing the mass flowrate. Electron-neutral collisions could explain this: as the propellant flowrate is increased, the neutral density in the source is increased, which results in a higher collision rate, and hence a conversion of electron gyrokinetic energy into longitudinal energy and electron pressure in the source. This results in a decrease in the electron perpendicular pressure. The trends and magnitudes are in line with the first measurements conducted by Vialis et al. [11] with an ECR thruster similar to that used in this work. The author found that \({T}_{B}/{T}_{T}\) was almost constant (around 70%) for the 1 sccm case and power between 20 and 60 W.

Percentage of magnetic thrust vs. absorbed power for different xenon flowrates with magnetic configurations SM and BM
These results are also in line with numerical simulations of an ECR thruster similar to that used in this work, where the magnetic thrust is approximately 60% of the total axial momentum at 2 sccm and 27 W [10]. Direct thrust measurements on a helicon thruster [22] globally gave lower values of the magnetic thrust contribution, but the magnetic topology was different and the thruster use argon as propellant gas. When increasing the magnetic field, it was shown that the magnetic thrust can be more than half of total thrust.
The comparison of magnetic and thermal thrust contributions can give insight into the electron energy anisotropy in the source of the ECR thruster. The qualitative estimation of the electron anisotropy is derived using a particle approach to describe the magnetic thrust and a fluid approach to describe the thermal thrust.
The diamagnetic force originates from the interaction between the electron diamagnetic current and the external applied magnetic field. It is then the integral of the \(\mu \cdot \nabla \overrightarrow{\mathrm{B}}\) force on all electrons in the control volume [25, 26]. Using a particle approach and assuming an axisymmetric expanding plasma in a monotonically divergent magnetic field, the magnetic force is written as
where \(\overline{\mu }\) is the mean value of the electron magnetic moment, \({n}_{e}\) is the electron density, and \(\frac{\partial {B}_{z}}{\partial z}\) is the magnetic field axial gradient. \({r}_{p}\left(z\right)\) is equal to the source radius (\({r}_{S}\)) inside the source, whereas it is the coordinate of the MDML inside the plume. The MDML (as termed in Ref. [27]) is the most divergent magnetic line that intersects the outer conductor at (\(z={L}_{S},r={r}_{S}\)), where \({L}_{S}\) is the source length. The electron magnetic moment is an adiabatic invariant and is defined as [25]
where \({m}_{e}\) is the electron mass, \({u}_{e,\perp }\) is the component perpendicular to the magnetic line of the electron velocity, and \({E}_{e,\perp }\) is the corresponding perpendicular electron kinetic energy.
The thermal thrust contribution is written using the fluid model approach in an axisymmetric expanding plasma [6] as
where \({p}_{e0,\parallel }\) is the electron pressure parallel to the thrust axis. As indicated by Takahashi et al. [6], the thermal thrust is produced at the plane of maximum electron pressure. In this work, the latter coincides with the backwall plane (i.e., \(z=0\)). Under the assumption of uniform radial distribution of electron pressure in the source, the thermal thrust can be expressed as:
where \({A}_{S}\) is the cross-section of the coaxial cavity.
As the electron density is high in the source and dramatically drops in the expansion region [28], one can assume that \({T}_{B}\) is mainly produced in the source. Further analysis that combines thrust measurements with electron density 2D maps has shown that the magnetic thrust produced in the source (\({T}_{B,source}\)) represents around 70% of the total magnetic thrust (\({T}_{B}\)) [28]. The magnetic thrust can then be approximated:
where \({\overline{\mu }}_{S}\) is the average magnetic moment of electrons in the source, and \({\overline{n} }_{e,S}\) is the average (uniform) electron density in the source. The ratio of magnetic thrust to thermal thrust can then be written as
where \({p}_{e,\perp }\) is found using Eq. 2 and the ideal gas law.The integral term into brackets in Eq. 6 is a characteristic of the applied magnetic field and is computed for both magnetic configurations. Using this approach, the ratio of mean electron perpendicular pressure to mean electron parallel pressure is directly proportional to the ratio of \({T}_{B}\) over \({T}_{S}\) and can be computed for all thrust measurements. The results are shown in Fig. 8 (with electron perpendicular pressure calculated for a magnetic field of 875 G in Eq. 6). A high electron anisotropy is observed, with values of \(\frac{{p}_{e,\perp }}{{p}_{e,\parallel }}\) ratio up to 5 for configuration SM and up to 3.5 in the BM case. As discussed above, in this work, we consider that the force measured on the solid walls of the thruster corresponds uniquely to the thermal thrust contribution (\({T}_{S}\)). Considering the estimation of the ion axial momentum (\({T}_{w}\)) lost at the radial walls, this approximation results in a possible overestimation of \(\frac{{p}_{e,\perp }}{{p}_{e,\parallel }}\) between 10 and 30% (in the worst case): a lower anisotropy would be obtained if \({T}_{w}\) were not neglected when computing the effective value of \({T}_{S}\). Indeed, if \({T}_{w}\) is negative, the effective \({T}_{S}\) is larger, as seen in Ref. [21].

Ratio of mean electron perpendicular pressure \({{\varvec{p}}}_{{\varvec{e}}\perp }\) to mean electron parallel pressure \({{\varvec{p}}}_{{\varvec{e}}\parallel }\) for the different operating conditions with configurations SM and BM (left and right, respectively)
For both configurations, on the whole range of microwave power, \(\frac{{p}_{e,\perp }}{{p}_{e,\parallel }}\) decreases with increasing mass flowrate. This is consistent with the increase of the collision rate, which tends to equalize electron gyrokinetic and longitudinal energies. A higher electron anisotropy is found globally for the configuration SM, which can be seen as the effect of better confinement in the source, hence a reduction of electrons losses on the walls.
The dependency of \(\frac{{p}_{e,\perp }}{{p}_{e,\parallel }}\) on microwave power is more difficult to interpret. For configuration SM, the ratio is almost constant with power at 1.5 and 2 sccm, whereas the curve is bell-shaped at lower flowrates, with a ratio between 3 and 5 at 0.7 sccm. For configuration BM, at 1.5 sccm, the ratio drops from 2.4 (at 12 W) to 1.4 (at 60 W), which probably reveals the limits of such an approach. One could expect that perpendicular electron temperature and, in turn, electron anisotropy increase with power. However, there exist complex interactions that may explain the observed trends. First, the increase of \({T}_{e,\perp }\) leads to an increase of propellant ionization, so an increase of plasma density. Indeed, it has been observed that electron density increases almost linearly with power [29]. But it also leads to higher losses on the walls, as a result of the higher Larmor radius. Second, the variation of electron density spatial distribution inside the source with the power may affect power deposition and electron heating processes. In the ECR thruster, power is deposited as a combination of right and left-hand polarized waves. The former primarily heats electrons in a direction perpendicular to magnetic lines, resulting in high perpendicular electron temperature. The absorption of the latter is possible through conversion into other wave modes that can be absorbed [30]. Detailed ECR heating models are required to provide a precise physical explanation.
Interestingly, for low flow rates, a good correlation is observed between the maximum of thrust efficiency and the maximum of \(\frac{{p}_{e,\perp }}{{p}_{e,\parallel }}\) ratio. This suggests the existence of a point of optimum in terms of power deposited in the plasma, flowrate, and resulting power losses to the walls. Further investigation is ongoing.
The results presented in this work can be compared with previous investigations on electron properties inside an ECR thruster performed by Correyero et al. [31, 32]. The authors measured the perpendicular electron pressure inside the thruster source using a diamagnetic loop. Values between 0.2 and 1 Pa were found depending on the computation method and the hypothesis on plasma density profile [32]. From the results presented in this work, it is also possible to estimate the magnitude of the perpendicular electron pressure inside the source, assuming uniform plasma properties inside the source. This can be done by estimating the parallel electron pressure using Eq. 4 and the measured values of \({T}_{S}\) and then using the \(\frac{{p}_{e,\perp }}{{p}_{e,\parallel }}\) ratio given in Fig. 8. Values of \({p}_{e,\perp }\) are seen to increase with the power for a given flowrate, and to decrease with the flowrate for a given power, consistent with the findings presented in Ref. [32]. However, the values obtained in this work are slightly larger than those in Ref. [32]: from around 0.5 to 1.2 Pa over the tested power range at 1 and 2 sccm for both topologies.
Furthermore, an equivalent isotropic electron pressure inside the source can be estimated assuming Maxwellian energy distribution functions to describe separately the perpendicular and parallel electron motions:
Such a value allows for a comparison with the numerical results reported by Sanchez-Villar et al. [10] computed using self-consistent hybrid simulations of an ECR thruster. The authors indicate an isotropic electron pressure (\({p}_{e0}\)) around 1 Pa inside the source at 2 sccm and 27 W of absorbed power. In this work, \({p}_{e,\parallel }\) is estimated with Eq. 4 around 0.4 Pa and \({p}_{e,\perp }\) is estimated around 1 Pa in the conditions of the simulation. This yields an equivalent isotropic pressure of 0.8 Pa, close to the value in Ref. [10].
A more accurate model, accounting for the 2D spatial distribution of the electron density inside the thruster source and plume, would allow for a more precise estimation of the electron energy anisotropy inside the thruster source. Investigation on this point is still ongoing, and preliminary results are presented in Ref. [28]. While the latter give access to more detailed information on electron properties, it is noteworthy that the results on electron anisotropy are in good agreement with those obtained with the method presented in this paper, which is only based on thrust measurements.
Conclusion
Direct thrust measurements of total, magnetic, and thermal thrusts have been performed on an ECR plasma thruster for various operating conditions and two different magnetic field configurations. The typical bell shape of thruster efficiency is well correlated with the saturation of the magnetic thrust. The contribution of magnetic thrust to total thrust can be as high as 80% and decreases when increasing mass flowrate. Counter-intuitively, the magnetic field contribution is generally higher for the magnetic field configuration with the lowest divergence. A high degree of electron anisotropy has been found using experimental thrust measurements, a particle description of the \({T}_{B}\) contribution, and a fluid description of the \({T}_{S}\) contribution.
A more accurate analysis of electron properties can be inferred from thrust contribution measurements, such as the one proposed in [28], by taking into account the spatial distribution of electron density in the magnetic nozzle and the contribution of the whole plume to the magnetic thrust (and not only the source). This method allows for the absolute determination of electron properties, such as perpendicular and parallel components of pressure and temperature.
It is noteworthy that the experiments presented in this paper were performed in a small vacuum chamber, which results in degraded thruster performances. The next step would be to confirm the observed trends in better vacuum and facility boundary conditions, where the ECR plasma thruster has shown thrust efficiency values up to 45% [16]. Finally, it would be helpful to have direct measurements of electron anisotropy by advanced diagnostics like Thomson scattering and to compare results with the relative thrust contributions.
Availability of data and materials
Data are available upon reasonable request to the authors.
References
D. Staab et al., “AQUAJET : An Electrodeless ECR Water,” in SPACE PROPULSION 2018, 2018, p. SP2018_00359.
Sheppard AJ, Little JM (2020) Scaling laws for electrodeless plasma propulsion with water vapor propellant. Plasma Sources Sci Technol 29:045007
Charles C, Boswell RW, Laine R, MacLellan P (2008) An experimental investigation of alternative propellants for the helicon double layer thruster. J Phys D Appl Phys 41:175213
Ahedo E, Merino M (2010) Two-dimensional supersonic plasma acceleration in a magnetic nozzle. Phys Plasmas 17:073501
Ahedo E, Merino M (2011) On plasma detachment in propulsive magnetic nozzles. Phys Plasmas 18:053504
Takahashi K, Lafleur T, Charles C, Alexander P, Boswell RW (2011) Electron diamagnetic effect on axial force in an expanding plasma: Experiments and theory. Phys Rev Lett 107:235001
Takahashi K, Charles C, Boswell RW (2013) Approaching the theoretical limit of diamagnetic-induced momentum in a rapidly diverging magnetic nozzle. Phys Rev Lett 110:195003
Takahashi K, Charles C, Boswell R, Ando A (2014) Effect of magnetic and physical nozzles on plasma thruster performance. Plasma Sources Sci Technol 23:044004
Fruchtman A, Takahashi K, Charles C, Boswell RW (2012) A magnetic nozzle calculation of the force on a plasma. Phys Plasmas 19:033507
Sánchez-Villar Á, Zhou J, Ahedo E, Merino M (2021) Coupled plasma transport and electromagnetic wave simulation of an ECR thruster. Plasma Sources Sci Technol 30:045005
Vialis T, Jarrige J, Aanesland A, Packan D (2018) Direct thrust measurement of an electron cyclotron resonance plasma thruster. J Propuls Power 34:1323–1333
Cannat F, Lafleur T, Jarrige J, Chabert P, Elias PQ, Packan D (2015) Optimization of a coaxial electron cyclotron resonance plasma thruster with an analytical model. Phys Plasmas 22:053503
Peterschmitt S, Packan D (2021) Impact of the microwave coupling structure on an electron-cyclotron resonance thruster. J Propuls Power 37(6):806–815
Correyero S, Jarrige J, Packan D, Ahedo E (2019) Plasma beam characterization along the magnetic nozzle of an ECR thruster. Plasma Sources Sci Technol 28:095004
S. Peterschmitt, “Development of a stable and efficient electron cyclotron resonance thruster with magnetic nozzle,” Institut Polytechnique de Paris, 2020.
V. Désangles et al., “ECRA thruster advances, 30W and 200W prototypes latest performances,” in 37th International Electric Propulsion Conference, 2022, p. IEPC-2022–513.
D. Rafalskyi and A. Aanesland, “A Neutralizer-Free Gridded Ion Thruster Embedded Into A 1U Cubesat Module,” in 35th International Electric Propulsion Conference, 2017, p. IEPC-2017–94.
D. Pavarin et al., “Thruster Development Set-up for the Helicon Plasma Hydrazine Combined Micro Research Project (HPH.com),” in 32th International Electric Propulsion Conference, 2011, p. IEPC-2011–241.
A. Gurciullo, J. Jarrige, P. Lascombes, and D. Packan, “Experimental performance and plume characterisation of a miniaturised 50W Hall thruster,” in 36th International Electric Propulsion Conference, 2019, p. IEPC-2019–142.
J. Jarrige, D. Packan, A. Blanchet, and L. Herrero, “Direct Thrust Measurement of a Vacuum Arc Thruster,” in 36th International Electric Propulsion Conference, 2019, p. IEPC-2019–521.
Takahashi K, Chiba A, Komuro A, Ando A (2015) Axial momentum lost to a lateral wall of a helicon plasma source. Phys Rev Lett 114:195001
Takahashi K, Ando A (2017) Enhancement of axial momentum lost to the radial wall by the upstream magnetic field in a helicon source. Plasma Phys Control Fusion 59:054007
Takahashi K, Sugawara T, Ando A (2020) Spatially- and vector-resolved momentum flux lost to a wall in a magnetic nozzle rf plasma thruster. Sci Rep 10:1061
S. Baldinucci, S. Bergmann, J. A. Hondagneu, B. Wachs, and B. A. Jorns, “Impact of Facility Electrical Boundary Conditions on the Performance of an Electron Cyclotron Resonance Magnetic Nozzle Thruster,” in 37th International Electric Propulsion Conference, 2022, p. IEPC-2022–510.
J.-L. Delcroix and A. Bers, Physique des plasmas 1, 1st Ed. EDP Sciences, 1994.
J. D. Jackson, Classical Electrodynamics, 2nd Ed. Wiley, 1975.
Chen Z et al (2021) Compositions and distributions of the azimuthal currents in the magnetic nozzle. Plasma Sources Sci Technol 30:105012
F. Boni, J. Jarrige, and V. Désangles, “Plasma expansion and electron properties in a magnetic nozzle electrode-less thruster,” in 37th International Electric Propulsion Conference, 2022, p. IEPC-2022–527.
Boni F, Jarrige J, Désangles V, Minea T (2021) The curling probe: A numerical and experimental study. Application to the electron density measurements in an ECR plasma thruster. Rev Sci Instrum 92:033507
R. Geller, Electron Cyclotron Resonance Ion Sources and ECR Plasmas, 1st Ed. 1996.
S. Correyero, J. Jarrige, D. Packan, and E. Ahedo, “Measurement of anisotropic plasma properties along the magnetic nozzle expansion of an Electron Cyclotron Resonance Thruster,” in 35th International Electric Propulsion Conference, 2017, p. IEPC-2017–437.
Correyero S, Merino M, Elias PQ, Jarrige J, Packan D, Ahedo E (2019) Characterization of diamagnetism inside an ECR thruster with a diamagnetic loop. Phys Plasmas 26:053511
Code availability
Not applicable.
Funding
This research was partly funded by European Union’s Horizon 2020 research and innovation program under.
grant agreement No 730028 (MINOTOR project).
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design and participated in the material preparation. The data collection and analysis were performed by F. Boni. The first draft of the manuscript was written by J. Jarrige and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Boni, F., Désangles, V. & Jarrige, J. Experimental characterization of thrust production mechanisms in a magnetic nozzle ECR thruster. J Electr Propuls 1, 33 (2022). https://doi.org/10.1007/s44205-022-00034-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44205-022-00034-7