
Abstract
Hall-effect thrusters (HETs) are among the most commonly used propulsion systems for attitude and orbit control of satellites. As an arrangement in a cluster or individually, equipped with a mechanical suspension, thrust in all three spatial directions can be generated, but requires additional mechanisms and components. Therefore, the Technische Universität Dresden (TU Dresden) is currently working on a concept for developing a Hall-effect thruster with integrated thrust vector control, which would allow steering in all three spatial directions with just a single thruster. This new concept is intended to work solely by influencing the ion beam and should not have any additional mechanical components. The HET will come with a segmented anode to set different electrical potentials at the anode and cause an inhomogeneous distribution of the electric field within the discharge channel, which results in an inhomogeneous force vector distribution at the exit plane. It is assumed that this will generate turning moments around the center of gravity. Deliberately causing those turning moments can therefore be used for steering with just one thruster. This work presents the concept of the propulsion system, gives an outlook on the advantages of its technology and shows capabilities for space applications.
Similar content being viewed by others


Introduction
HETs are among the most commonly used propulsion system for spacecraft attitude and orbit control [1]. Satellites are usually released into a temporary orbit by launch vehicles and are then transferred to their target orbit. In order to reach this orbit, the satellites need their own propulsion system. Additional applications arise as the satellites reach their target orbit. Due to the atmospheric friction in low Earth orbit, the satellite is continuously slowed down and has to correct its orbit from time to time. A suitable drive system is also required to carry out evasive maneuvers if there is a risk of a collision with another object. To carry out such path correction maneuvers or attitude control, a propulsion system is required which can generate thrust forces in all three spatial directions.
So far, there have been various options for using HETs to steer the spacecraft in all three spatial directions. One option are mechanical suspensions, which can rotate the entire propulsion system within a certain angle and thus set different thrust directions [2, 3]. The integration of multiple thrusters is another option - each with different orientation or so-called clusters - to generate thrust in multiple directions [4]. Furthermore, it is possible to use reaction wheels to orientate the spacecraft before using the propulsion system to generate thrust into the desired direction [5]. There have also been attempts to influence the magnetic field of the HET in such a way that the ion beam is deflected in a specific direction to control the thrust vector [6]. All previous solutions for using HETs for attitude and orbit control depend on additional components for the HET. A suspension requires large mechanical components, additional electrical power and enlarges and complicates the engine system. Steering by integrating multiple propulsion systems also increases the complexity, size, weight and cost of the overall system. Reaction wheels for positioning the spacecraft are also an additional system that must be integrated in order to perform attitude control or orbital maneuvers. To deflect the ion beam by means of magnetic field control, a corresponding attachment must be mounted on the engine, which also requires additional weight and electrical power. All previous control solutions therefore increase the complexity, weight and volume of the propulsion system. Additional components also cause higher overall costs of the system and increase its susceptibility to errors.
For this reason, a novel configuration of the HET is to be designed, which does not require any additional mechanical components and controls the thrust vector solely by influencing the ion beam. Such a thruster would not only reduce weight and volume of the propulsion system, but also reduce the complexity and its susceptibility to errors and would be a benefit, especially for small satellites or CubeSats, that are very limited in the available installation space.
Hall-effect thruster concept
Hall-effect thruster theory
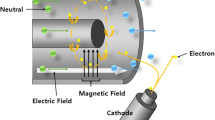
The basics and functionality of a HET have been adequately described in literature, see f.e. Ref. [7]. In a HET, thrust is generated by accelerating ions through an electric field and depends on the mass flow \(\dot{m}\) of the propellant gas and its exit velocity vex:
The exit velocity of electrostatically accelerated ions is given as:
where e is the elementary charge, Ud is the discharge voltage, mi is the ion mass. Accordingly, a higher acceleration voltage generates a higher thrust. In a conventional HET, an electric field is created between the anode at the channel bottom and the space charge of electrons in the front section of the channel that accelerates the ionized propellant. This results in a uniform thrust vector distribution along the exit plane and thus an axially directed total thrust. To use the ion beam of a HET for steering in different directions, this homogeneous thrust vector distribution should be deliberately “disturbed”. As e and the ion mass mi cannot be influenced for a given system, the only way to change the thrust behavior of a HET is by changing the discharge voltage Ud or the mass flow rate \(\dot{m}\). Therefore, a HET is being developed that allows setting different local discharge voltages at the anode and inhomogeneous injection of the propellant.
Hall-effect thruster design
Based on the knowledge gained from the development of HETs in previous work [8], a new, improved model has been developed at TU Dresden. The new thruster was designed for a performance of around 500W. The HET assembly has a maximum outer diameter of 93 mm and a length of 85 mm. The magnetic core is made of soft iron mainly because of its favorable magnetic properties and availability. In small-scale HETs, pure iron can nevertheless reach saturation in critical components. Other soft magnetic metals like the iron-cobalt-vanadium alloy Hiperco50 are therefore commonly used as an alternative. Hiperco50 has a slightly higher saturation flux density than soft iron but is notably more expensive. During the design process of the presented HET, care was taken to avoid saturation in critical components of the magnetic circuit. The magnetic properties of the iron components are additionally improved by a magnetic annealing process that increases the saturation flux density to > 2 T. A cross-section of the new HET assembly is shown in Fig. 1.

Cross-section of the HET
The HET employs two coils concentric to the discharge channel. The inner coil requires high coil currents > 5 A to achieve magnetic shielding of the channel walls. The high currents and small heat conduction paths result in temperatures of the electromagnets that likely exceed the maximum operating temperature of conventional enameled copper wires. To prevent damage, the electromagnets use a nickel wire with a glass fiber insulation that can withstand continuous temperatures up to 450 °C. However, the wire diameter is considerably larger compared to an enameled copper wire of the same conductor cross-section area because of the thick insulation layer. In order to achieve sufficient coil windings, the thruster had to be elongated in the axial direction.
The HET uses two magnetic screens concentric to the discharge channel that deflect the magnetic field in a way to achieve magnetic shielding. An extensive parameter study using the COMSOL Multiphysics software was conducted to find adequate values for the axial and radial dimensions of the screens and coil currents. The chosen geometric configuration creates a magnetic flux density peak a few millimeters downstream of the channel exit plane. By varying the coil currents, peak flux density values in the radial direction between 15 mT and 20 mT can be achieved. The magnetic field lines for an exemplary coil current combination are shown in Fig. 2.

COMSOL Multiphysics plot of the magnetic field lines
In order to implement the idea of setting different local discharge voltages, the anode is divided into individual segments. Each segment covers an angle of 114°, leaving a gap of 6° between each segment. Setting different anode potentials and generating areas of different electric field strengths within the discharge channel should vary the exit velocities of the ions in azimuthal direction to the exit plane. The anode at the bottom of the discharge channel is therefore not ring-shaped, as it is usually the case, but an anode divided into three segments. A model of the segmented anode is shown in Fig. 3.

a Explosion model of HET with segmented anode. b Model of segmented anode
Each segment consists of a hollow base body made of boron nitride and is fed by its own gas supply. After the propellant gas flows into the hollow body, it can spread out evenly therein before it gradually flows through the porous ceramic cover. The anode disc lies above the cover and consists of small holes which the propellant can flow through into the discharge channel. Each anode segment has its own electrical contact and is electrically isolated from the other two segments. A cross-section of one anode segment on the ground of the discharge channel is shown in Fig. 4.

Cross-section of the segmented anode inside the discharge channel of the HET
Thrust vector control
The segmented anode makes it possible to set different electrical potentials at each segment of the anode. This will generate an inhomogeneous electric field inside the discharge channel. The ions within the discharge channel are accelerated by the locally acting electric field and generate a corresponding thrust. Therefore, setting different discharge voltages at each anode segment may cause different accelerations of the ions in the areas of the three anode segments, thus leading to different local force vectors. This results in an inhomogeneous thrust vector distribution over the area of the exit plane of the discharge channel. Such an inhomogeneous force vector distribution has the consequence that a turning moment is generated around the center of gravity of the HET. By varying the anode potentials, the turning moment can be regulated and thus the thruster can be rotated in all directions. A two-dimensional sketch of concept is shown in Fig. 5.

Schematic two-dimensional sketch of the principle of operation of the HET with different anode potentials
In Fig. 5, the top anode has a higher potential than the bottom anode. The ions of the propellant gas are accelerated according to the local electric field and generate a thrust F. Due to the higher acceleration voltage of the upper anode, the local ions in its surroundings experience a stronger acceleration than the local ions of the lower anode and thus generate a greater thrust. This results in an imbalance of forces, which creates a turning moment around the center of gravity.
As each of the three anode segments is equipped with an individual gas supply, different mass flow rates can be set to each segment. According to Eq. (1), a higher mass flow rate generates higher thrust. Changes in the local thrust vector might be possible by a non-uniform propellant injection to the segments. This might support and increase the effect of the different anode voltages on the local thrust vectors. The anode voltage is a crucial factor for the ignition and operating behavior of the thruster. Different anode potential might lead to unstable discharges. In other work, it could be shown that a non-uniform propellant flow rate can decrease the discharge oscillation current but reduces the thrust efficiency of an anode layer type HET [9].
It is to be experimentally investigated to what extent the segmented anode can influence the thrust vector distribution of this magnetic layer type HET and if a non-uniform propellant injection improves the desired effect. Precise testing and characterization are therefore necessary to determine the influence on the operational stability and the thruster efficiency of the HET.
Hollow cathode
Efficient electron sources for providing the electrons and for neutralizing the ion beam are fundamental for the operation of the HET. In addition to the development of the thruster, the TU Dresden is also developing a heaterless cathode, which is to be used together with the HET. The hollow cathode uses the low work function material C12A7 electride as the emitter material. The cathode shows reliable electron emission and performance data have already been recorded and published elsewhere [10]. The heaterless hollow cathode is shown in Fig. 6. Tests with an earlier version of a HET have already been carried out successfully [11]. However, this interaction needs to be further refined and optimized to enable optimal operating conditions for both the cathode and the thruster.

Heaterless hollow cathode with C12A7 electride
Test facility
The TU Dresden has the infrastructure and the equipment for a detailed characterization of electric space propulsion systems. The tests can be carried out in a large cuboid vacuum chamber (2.5 m long, 1.2 m wide and 1.5 m high). The dimensions of the chamber guarantee that the interactions of the plasma with the chamber walls are minimized. In addition, there is sufficient space for setting up the thruster and diagnostics. A cryo-pump with a nominal pumping speed of 10,000 l/s nitrogen is attached to this chamber providing a base pressure below 1E-7 mbar without mass flow from the thruster or cathode. In addition to the development of the HET, the TU Dresden is also working on an innovative test stand to characterize this propulsion system. Since the HET is to be used for thrust vector control, a three-axis thrust balance is being developed in parallel, which can measure thrust forces in all three spatial directions. This thrust balance consists of two nested double pendulum balances for each horizontal axis with an integrated analytical balance and is designed for propulsion systems of up to 6.3 kg. The deflection of double pendulum caused by the thrust of the propulsion system will be measured by photo sensors. This deflection can then be converted into an equivalent thrust force using the spring constant of the double pendulum. The thrust in vertical direction will be directly measured by an analytical balance inside the inner pendulum, where the propulsion system will be placed on. It should be possible to resolve forces below 0.1 mN in all three directions. The electrical connections of the HET and cathode will be realized through liquid metal reservoirs filled with Galinstan along the axes of the double pendulum, enabling a frictionless connection.
Furthermore, an infrastructure for determining the plasma parameters and beam dispersion is being developed. A rotating arm, which can be equipped with various measuring instruments like Langmuir probes and Faraday cups, will be used to measure the plasma parameters in the far-field of the HET. A panel of numerous Faraday cups is being developed, which can measure the distribution of the ion beam in the far-field of the thruster and detect the influence of the segmented anode on the ion beam. In addition to the three-axis thrust balance, this should help to investigate the effectiveness of the HET with thrust vector control by a segmented anode.
Conclusion
A concept for a HET with a segmented anode was developed that might provide thrust vector control. Different discharge voltages can be set by the segmented anode which would make it possible to influence the electric field inside the discharge channel in such a way that the ions are not accelerated uniformly, but depending on the locally acting electric field. By deliberately generating turning moments, it would be possible to orientate the spacecraft in all spatial directions. A single thruster would be sufficient to control the attitude and orbit of a whole spacecraft. This would not only reduce the complexity of the overall system, but also the weight, volume, and susceptibility to errors. Efficient use of the available installation space is particularly important for small spacecraft. Since the number of small satellites and CubeSats in orbit is constantly growing, the possible fields of application of a compact electric propulsion system with integrated thrust vector control are large. The next step is to implement the segmented anode into the HET and investigate if a stable operation of the thruster with different anode potentials is possible. It is also important to find out to what extent this can be used for targeted control and if the concept can compete with the conventional solutions in the end. The TU Dresden is therefore currently not only developing a HET with a segmented anode but also the necessary test infrastructure to investigate this concept.
Nomenclature
e elementary charge
F thrust
\(\dot{m\ }\) mass flow
mi ion mass
Ud discharge voltage
vex propellant exit velocity
Availability of data and materials
Available on request.
References
Lev D et al (2017) The Technological and Commercial Expansion of Electric Propulsion in the Past 24 Years, 35th Int. Electr. Propuls. Conf, p IEPC-2017-242
Biron J et al (2005) The thruster module assembly (hall effect thruster) design, qualification and flight. Proc Int Electr Propuls Conf 2005:1–7
Lorand A, Duchemin OB, Cornu N (2011) Next Generation of Thruster Module Assembly (TMA-NG), 32nd Int. Electr Propuls Conf, p IEPC-2011-201
Duchemin O (2007) Multi-Channel hall-effect thrusters: Mission applications and architecture trade-offs. IEPC-2007-227. Assembly, pp. 1–15
Wertz JR (2007) Space mission analysis and design, 3rd edn. Microcosm Press, Hawthorne
O. Duchemin et al., “Development of a prototype thrust steering device for hall-effect thrusters,” Proc. 4th Int. Spacecr. Propuls. Conf. 2004. Available: http://articles.adsabs.harvard.edu/pdf/2004ESASP.555E..42D
Goebel DM, Katz I (2008) Fundamentals of electric propulsion: ion and hall thrusters. Fundam Electr Propuls Ion Hall Thrusters:1–507. https://doi.org/10.1002/9780470436448
Gondol N, Drobny C, Neunzig O, Tajmar M (2019) Development and characterization of a miniature hall-effect thruster using permanent magnets. In: , 36th Int. Electr. Propuls. Conf. Univ, vol 2019–634, Vienna, pp 1–13
Fukushima Y, Yokota S, Komurasaki K, Arakawa Y (2009) Influence of azimuthally nonuniform propellant flow rate on thrust vector and discharge current oscillation in a hall thruster. Trans Japan Soc Aeronaut Sp Sci Sp Technol Japan 7(ists26):Pb_41-Pb_45. https://doi.org/10.2322/tstj.7.Pb_41
Drobny C, Wulfkühler J-P, Wätzig K, Tajmar M (2021) Endurance test of a hollow cathode using the emitter material C12A7 Electride. In: Space propulsion 2021 conference, Digital, p 00153
C. Drobny, J.-P. Wulfkühler, and M. Tajmar, “Development of a C12A7 Electride Hollow Cathode and Joint Operation with a Plasma Thruster,” Proc. 36th IEPC, p. IEPC-2019–629, 2019
Acknowledgements
We gratefully acknowledge funding by the German Aerospace Center DLR (50RS2103).
Code availability
Not applicable.
Funding
Open Access funding enabled and organized by Projekt DEAL. This work is funded by the German Aerospace Center DLR (50RS2103).
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception, the design and the manuscript. The author(s) read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
Not applicable.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Stark, W., Gondol, N. & Tajmar, M. Concept and design of a hall-effect thruster with integrated thrust vector control. J Electr Propuls 1, 21 (2022). https://doi.org/10.1007/s44205-022-00023-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44205-022-00023-w