
Abstract
Recently, there has been a renewed interest in avoidance behavior, and its applicability to clinical conditions such as anxiety, posttraumatic stress disorder (PTSD) and addiction. In a computer-based avoidance task for humans, participants control an on-screen spaceship, shoot at enemy targets (appetitive cue) to gain points, and learn to respond to an on-screen warning signal (WS) by entering safe “hiding” areas to escape/avoid an aversive event (point loss and on-screen explosion) paired with an on-screen aversive cue (bomb). Prior research on active avoidance in rodents suggests that avoidance learning is facilitated if the response also terminates the WS. Here, we adapted the computer-based task to investigate this idea in healthy humans. Two hundred and twenty-two young adults completed one of three conditions of the task: a non-contingent condition, where hiding caused omission/avoidance of the aversive event but did not terminate the WS; a fully-contingent condition, where hiding also caused omission/termination of all on-screen appetitive and aversive cues as well as terminating the WS; and a partially-contingent condition where hiding caused omission of the appetitive and aversive cues, but did not affect the WS. Both contingency manipulations decreased escape/avoidance behavior, as compared to the non-contingent condition where the WS and other cues are not affected by the avoidance behavior. This study has implications for the basic understanding of the mechanisms that affect avoidance behavior in humans.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Avoidance is the performance or withholding of a specific response to prevent an imminent aversive event. While often adaptive, avoidance can become pathological when the avoidance response persists even when the aversive event no longer occurs. Such pathological avoidance is a key feature of anxiety disorders, posttraumatic stress disorder (PTSD), depression and addiction disorders [1]. Differences in how individuals learn and maintain avoidance behaviors may also be an important factor in determining which individuals exposed to trauma or to drugs of abuse go on to develop PTSD [2,3,4,5] or substance use disorders [6,7,8,9].
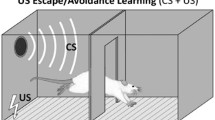
One task that has been used to assess avoidance acquisition and extinction in rodents is a lever-press task in which a warning signal (WS) such as a light or a tone precedes and predicts an aversive event such as an electric foot shock. The rodent can learn to terminate the shock by making a behavioral response such as lever press (escape response), and to avert it altogether by responding during the WS but before the onset of the aversive event, which results in complete omission of the shock for that trial (avoidance response). While an increasing number of human avoidance tasks involve an electric shock as the aversive event, most do not directly measure avoidance learning, since the participant is typically told of the contingency between responding and shock termination/prevention; i.e., these tasks measure performance, rather than acquisition of the avoidance response [10,11,12,13,14,15,16,17,18].
As an alternative to these approaches, computer-based avoidance tasks have been developed and involve a loss of points/money or a negative affective stimulus (e.g. unpleasant photo or sound), as the aversive event to be avoided [19,20,21]. In one series of studies, participants used computer keys to control an on-screen spaceship, and were instructed to maximize their score by targeting and shooting at on-screen enemy targets (appetitive cues). Periodically, a visual cue (WS) appeared on the screen, which was followed after a few seconds by an on-screen aversive event: a bomb appeared and repeatedly exploded, causing damage to the participant’s spaceship and accumulating point loss. Participants could learn to terminate (escape from) this aversive event by hiding their spaceship in “safe areas” at the corners of the screen until the bomb disappeared; participants who entered a safe area during the WS and remained there until the bomb disappeared could avoid all point loss and explosions on that trial. Importantly, participants do not receive any explicit instructions on how to escape or avoid the aversive event. Typically, participants first discover how to escape from the explosions and point loss, and then to avoid them altogether [20]. When the acquisition phase is followed by an extinction phase, in which WS is no longer followed by the aversive event, the avoidance response gradually extinguishes [22]. This task therefore seems to capture some of the features of the animal lever-press paradigm, in which rats also typically first learn to escape, and then to avoid, and extinguish when WS no longer signals threat of a foot shock.
Since its development, we have used the spaceship task to demonstrate specific patterns of greater escape/avoidance behavior in various healthy and clinical populations. First, we demonstrated that two vulnerability factors for anxiety disorders (female sex and behaviorally-inhibited personality) were associated with greater avoidance behavior in healthy individuals, suggesting that this could be a behavioral mechanism that mediates vulnerability to anxiety in humans [20, 22]. Then, since addiction is often conceptualized as a behavioral strategy for avoiding negative experiences, we used this task to test avoidance in treated opioid-dependent patients, and indeed, found that addicts demonstrated more avoidance compared to healthy controls [23]. Interestingly, we also found that treated alcohol-dependent patients exhibited greater escape/avoidance behavior, as well as greater approach behavior, compared to healthy controls [24], supporting the overactivation of both positive and negative reinforcement systems in this population. As avoidance is a predominant symptom in PTSD, we also tested veterans and civilians with PTSD symptoms and indeed, found that they demonstrated greater avoidance behavior than individuals with few/no symptoms [25]. Lastly, we reported the association between avoidance behavior and symptoms of depression in patients with Parkinson’s Disease [26]. Altogether, these findings support the idea that greater escape/avoidance responding could be a mechanism that contributes to the development of symptoms in various psychiatric disorders, and validate the spaceship task as an experimental tool that can be used to conduct this research.
The spaceship task therefore may provide a testbed to better understand the mechanisms underlying both normal and exaggerated acquisition, as well as ways in which individual’s tendency to acquire and maintain avoidance can be manipulated; this might, in turn, suggest therapeutic approaches. For example, research in animals has suggested that avoidance learning is most efficient when the subject’s avoidance response immediately terminates the WS, as well as prevents the upcoming shock [27, 28]. For example, Avcu et al. [28] compared a “contingent” group where the avoidance response also terminated the WS with a “non-contingent” group where the avoidance response caused omission of the shock, but the WS remained on for a fixed duration, whether or not the avoidance response had occurred; both groups acquired the avoidance response, but avoidance learning was better in the contingent group. The finding of greater avoidance learning in the contingent group might be because WS termination provides informational feedback (i.e., that the avoidance response has been “registered”), and/or draws attention to the preceding responses, as suggested in Lieberman’s “marking hypothesis” [34,35,36]. Additionally, it is possible that the WS itself acquires negative valence by virtue of its association with the shock, and so terminating the WS provided an additional source of reinforcement of the avoidance response, consistent with the “two-factor” theory of avoidance [29, 30].
The question then arises of whether such contingency manipulations may similarly affect how humans acquire avoidance responses. One early study by Meyer [31] that attempted to address this issue found no effect of WS continency on avoidance acquisition, although there were effects on extinction of the avoidance response. However, the paradigm used by Meyer considers a discrete aversive event (an annoying air blast) that can be prevented by a button press. As such, the aversive event can be prevented but there is no transition from escape to avoidance as in the rat lever-press paradigm and in the human spaceship avoidance task.
Therefore, the current study aimed to better understand whether stimulus contingencies could affect learning as human participants transition from escape to avoidance. We compared a control “non-contingent” condition, in which the WS occurred for a fixed duration regardless of whether an avoidance response was made, with a “fully-contingent” condition in which the avoidance response also caused immediate termination of the WS and all other on-screen events including the aversive (bomb) and appetitive cues (enemy targets) for the duration of the hiding response. We also considered an intermediate “partially-contingent” condition in which the avoidance response caused termination of all on-screen events except the WS. Our initial expectation, consistent with prior rat data, was that termination of the WS in the fully-contingent condition should enhance acquisition of avoidance responses, but that there might also be some facilitation of acquisition learning in the partially-contingent condition, since removal of the appetitive events could also provide informational feedback “marking” the successful avoidance response.
2 Methods
2.1 Participants
Two hundred twenty-two undergraduate students completed the study. The study was conducted at two sites, a large Northeastern University in an urban setting (n = 115) where participants were compensated $20 for one hour, and a large Western university, including both rural and urban components (n = 107), where participants received credit towards an undergraduate psychology research requirement. Data collection at the Northeastern site preceded data collection at the Western site. Procedures at each site were approved by the corresponding institutional review boards and followed federal guidelines for the protection of human subjects. After providing a written informed consent for participation, participants completed a short questionnaire about their demographic information including gender, age, years of education, and race/ethnicity.
2.2 Avoidance task
All participants were administered a computer-based task that took the form of a spaceship videogame, which was a modification of a previously published task [22]. For the current study, task software was programmed in the SuperCard language (Solutions Etcetera, Pollock Pines, CA, USA) to run on Macintosh computers under OS X (10.9). The keyboard was masked except for three keys, labelled “ ← ”, “ → ” and “FIRE”, which the participants used to perform the task. In the task, participants controlled a spaceship and could move it to one of five horizontal locations at the bottom of the screen, by using the left and right arrow keys. Enemy targets appeared, one at a time, every ~1 s; each target was placed randomly in one of six locations on the screen. Participants were instructed to gain points by using the “FIRE” key to shoot at and destroy targets; every successful hit resulted in a reward of one point. Enemy targets did not fire back at the participant’s spaceship, and thus represented appetitive stimuli signaling opportunity for reward. In addition, every 20 s, a colored rectangle (WS) appeared for 5 s at the top of the screen (Fig. 1).

Screenshots of the spaceship task during the acquisition phase, showing possible events across the warning period (left), the bomb period (middle) and the inter-trial interval (ITI; right). A Screen events for the warning, bomb, and inter-trial interval are the same in all three task conditions, if the participant’s ship is not hiding. During the warning period, the warning signal (WS) appears as a blue light at the top of the screen. During the bomb period, an aversive cue (bomb) appears on the screen and there are periodic aversive events (explosions and point loss). During the ITI, the participant can fire at enemy targets to gain points. The three task conditions differ in what is visible when the participant's ship is in hiding. B In the “non-contingent” condition, all the cues including the WS continue to appear while the participant’s ship is in hiding (here, in the box at lower right of screen). Specifically, during the warning period, the WS and enemy targets remain visible; during the bomb period, the bomb remains on the screen; during the inter-trial interval, enemy targets continue to appear. C In the partially-contingent condition, the appetitive and aversive cues are omitted if the participant is in hiding, but the WS remains visible throughout the warning period. D In the fully-contingent condition, no cues (WS, enemy targets, or bomb) appear if the participant’s ship is in hiding. Thus, in the fully-contingent condition, the WS—along with the other on-screen events—is contingent on the participant’s response
During the acquisition phase, presence of the WS for 5 s (warning period) was followed by appearance of a bomb, which served as the aversive cue. The bomb remained on-screen for another 5 s (bomb period). The bomb period was divided into six segments of equal duration; during each segment there was an explosion of the participant’s spaceship and a loss of 5 points, to a maximum of six explosions and 30 points lost. At the bottom corners of the screen, there were two box-shaped areas representing “safe areas”. Moving the participant’s spaceship into one of those boxes was defined as “hiding.” While hiding, the participant’s spaceship could not be destroyed and no points could be lost, but neither could the participant shoot enemy targets and gain points. Hiding during the bomb period was defined as an “escape hiding” and terminated the ongoing aversive outcome (accumulating point loss and explosions) for any time segment that the participant stayed inside the box. Hiding during the warning period was defined as “avoidance hiding”, and it completely prevented the aversive outcome if the participant remained inside the box through the rest of the warning period and through the bomb period. Of note, the warning period presented an approach-avoidance conflict, where both appetitive and aversive cues were displayed when the participants stayed outside the safe areas [19]. As no appetitive cues were displayed during the bomb period, hiding rates during this period were expected to be higher (e.g., less incentive to emerge from hiding).
The participant was given no explicit instructions about the safe areas or the hiding response. The only instructions received at the start of the task were: “You are about to play a game in which you will be piloting a spaceship. You may use LEFT and RIGHT keys to move your spaceship, and press the FIRE key to fire lasers. Your goal is to score as many points as you can. The number of points will appear on the top of the screen. Good Luck!” Participants were then given 1 min of practice time, during which they could shoot the enemy targets but no WS or bomb appeared. Twelve acquisition trials followed, each defined by the appearance of the WS; the start of a trial was not explicitly signaled to the participants. Each trial was followed by a 10-s inter-trial interval (ITI), during which participants could gain points by shooting at targets, without any risk of aversive events. A running tally at the top of the screen showed the current points accumulated. This tally was not allowed to fall below zero, to minimize frustration among participants, but even when the tally was equal to zero, if the participant failed to hide during the bomb period, point loss and explosion of the participant’s spaceship were still displayed on the screen. The acquisition phase was followed by an extinction phase, consisting of 12 trials with the WS but no aversive cues (bombs) or aversive outcomes (point loss and explosions).
Participants were randomly assigned to one of three conditions: A non-contingent condition as described above, or “partially-contingent” or “fully-contingent” conditions, which altered the consequences of the hiding behavior. These conditions are visualized in Fig. 1 and summarized in Fig. 2. In the non-contingent condition, hiding during the bomb period (escape response) terminated the explosions and point loss but not the visual bomb cue; hiding during the warning period averted the explosions and point loss but did not terminate the WS nor affect the appetitive targets nor the visual bomb cue (Fig. 2A). In the partially-contingent condition, hiding triggered omission of both the aversive cue (bomb) and appetitive cue (enemy target) for the duration of the hiding response (Fig. 2B). However, the WS remained present for the duration of the warning period, regardless of the participant’s behavior—i.e. the presence of the WS was not contingent on the participant’s response. Finally, in the fully-contingent condition, hiding triggered omission of the aversive and appetitive cues as well as the WS (Fig. 2C); i.e., the WS duration was contingent on the participant’s responses. Of note, the avoidance response in the fully-contingent condition can be considered a “WS-escape” response, which could be reinforced by the termination of the aversive properties of the WS (“two-factor theory” of avoidance) [32]. In both contingent conditions, each time the participant exited the hiding place, the WS and/or appetitive and aversive cues reappeared.


Schematics of the spaceship task on three example trials during the acquisition phase. A Non-contingent condition. Here, trial 1 begins with a 5-s warning period, during which a warning signal (WS) appears and targets continue to appear, which the participant can shoot for points; Next, during a 5-s bomb period, the bomb cue appears and there are periodic explosions of the participant’s ship accompanied by point losses; Finally, during a 10-s intertrial interval (ITI), targets continue to appear and can be shot for points. On trial 2, the participant enters hiding during the bomb period (and remains there for the duration of the bomb period); this is scored as an escape response (ER, blue arrow) and causes termination of the explosions and point loss, although the bomb cue remains on screen. On trial 3, the participant enters hiding during the warning period (and remains there for the duration of the warning and bomb periods); this is scored as an avoidance response (AR, blue arrow) and causes omission of the explosions and point loss, although the duration of the WS is unaffected. On both trials 2 and 3, the reappearance of targets at the start of the ITI thus provides a visual cue that it is “safe” to emerge from hiding (which occurs on trials 2 and 3 after the start of the ITI, schematized here by green arrows). B Partially-contingent condition. Here, an escape response is made on trial 2, which causes termination of the bomb cue as well as of the explosions and point loss; An avoidance response is made on trial 3 which causes termination of the targets (though not the WS). On trials 2 and 3, targets do not reappear until the participant re-emerges from hiding (green arrows), thus removing the informational cue for when it is safe to emerge from hiding. C Fully-contingent condition. This condition is similar to the partially-contingent condition except that an avoidance response also causes termination of the WS, i.e. there are no on-screen cues at any point while the subject is in hiding
2.3 Data analysis
Approximately every 100 ms, the program recorded if the participant’s spaceship was inside or outside one of the boxes. For each trial, the program computed the percent of time the participant spent hiding during the 5-s warning period (“avoidance hiding”), as well as during the 5 s that followed the warning period (“escape hiding”). ITI hiding was computed as the percent of time spent hiding during the 10-s ITI. Avoidance, escape and ITI hiding were the dependent variables, and they were analyzed across all trials in all three task conditions, regardless of what cues were shown on screen; thus, for example, “escape hiding” was scored if participants spent time in hiding during the 5-s following the warning period, regardless of whether the bomb actually appeared on that trial. Statistical analyses were conducted using SPSS version 17.0 (SPSS Inc., Chicago, IL). Since the sample size was large (n = 222), normality of groups was not expected to affect analyses. The repeated measures ANOVA included Mauchly’s test of sphericity. The assumption of sphericity was violated and thus the Greenhouse–Geisser correction was completed. Post-hoc tests were executed when appropriate with Tukey’s HSD. Alpha was set to 0.05. The sample size was determined based on an a-priori power analysis conducted with G*Power [33], which indicated a minimum sample size of 186 would provide at least 80% power to detect differences among three groups with 12 repeated measures assuming a medium effect size.
3 Results
The demographics for the two sites and the three task conditions are shown in Table 1. Overall, the sample from the Northeastern site was more diverse in terms of ethnicity than the Western site. Participants at the Northeastern site self-reported race/ethnicity as Caucasian (n = 35), Asian or Pacific Islander (n = 33), Hispanic (n = 20), African–American (n = 14), multi-racial (n = 1) and other (n = 8). Participants at the Western site self-reported race/ethnicity as Caucasian (n = 69), followed by Hispanic (n = 17), African–American (n = 6), Asian or Pacific Islander (n = 4), multi-racial (n = 1) and other (n = 4). There were also differences in age and education level between the two sites, such that participants at the Northeastern site had higher mean age (t(220) = 5.24, p < 0.001) and lower mean education level (t(220) = 3.89, p < 0.001) than participants at the Western site. However, there were no differences in age or education level across the three task conditions. More importantly, there were no differences in escape or avoidance behavior or hiding during the ITI between sites, as indicated by a mixed-design ANOVA (p > 0.70), as well as no interactions with site (all p’s > 0.29). Therefore, all subsequent analyses combined data from both sites. Consistent with prior work with this task, female participants across both sites showed greater avoidance behavior than males during acquisition (numerical difference) and during extinction (p = 0.024; e.g., see [20, 22]). However, since our study was not specifically powered to examine gender differences, and these were not the focus of the current report, we do not discuss these results further; all subsequent analyses collapsed males and females from both sites into a single group.
3.1 Total scores
There was a significant difference in total scores across the three task conditions (F(2,111) = 5.98, p = 0.003). Tukey’s HSD post-hoc pairwise comparisons revealed that the non-contingent condition had higher total scores (mean (SD) = 352.5 (122.1)) than both the partially-contingent (mean (SD) = 296.8 (131.3); p = 0.026) and fully-contingent conditions (mean (SD) = 282.5 (124.9); p < 0.003). There was no significant difference in total scores between the partially- and fully-contingent conditions (p = 0.779).
3.2 Escape behavior
In all three task conditions, hiding in the safe areas during the 5 s that followed the warning period increased during the acquisition phase and decreased during the extinction phase. Specifically, during acquisition, participants learned to escape from (terminate) the aversive outcome by hiding in the safe areas during the bomb period (Fig. 3A). Such escape hiding increased over the 12 acquisition trials for all three conditions of the task, as suggested by a main effect of trial (mixed ANOVA, F(6.995,1532.009) = 208.336, p < 0.001). Escape hiding differed among the three conditions, as suggested by a main effect of condition (F(2, 219) = 6.111, p = 0.003). There was a trial x condition interaction (F(11, 1532.009) = 2.826, p < 0.001).

Escape hiding, expressed as percent of the 5-s bomb period where the participant’s ship is in hiding. Error bars represent standard error of the mean. A Escape hiding increased across the 12 acquisition trials in all three groups, but was greater in the non-contingent group than in the partially-contingent and fully-contingent groups, which did not differ. B Escape hiding decreased across the 12 extinction trials with a difference between the non-contingent group and the fully-contingent group
Pairwise comparisons among the three conditions revealed that escape hiding was reduced in fully-contingent condition compared to the non-contingent condition (p = 0.002), but the partially-contingent condition did not differ from either the non-contingent or fully-contingent condition (both p’s > 0.05). To further examine this interaction, post-hoc independent samples t-tests with alpha corrected to 0.0042 to protect significance levels were conducted. These analyses revealed that the three conditions started at the same level on the first acquisition trial but non-contingent group expressed significantly more escape responding than both the partially-contingent group from the fourth trial on, and the fully-contingent group from the second trial on (all p’s < 0.004).
During extinction when the aversive event no longer followed the WS, participants reduced hiding during the 5 s that followed the warning period (Fig. 3B). As expected, given the absence of any aversive event during these trials in all task conditions, there was a sharp decrease in escape hiding that was apparent from the first extinction trial. Interestingly, this was also the case for the two contingent conditions (where aversive events were already omitted during hiding), possibly due to their lower hiding on the last acquisition trial which increased their exposure to the new contingency of extinction trials. Specifically, there was a main effect of trial (F(6.902,1511.569) = 23.588, p < 0.001) as well as a main effect of condition (F(2, 219) = 6.111, p = 0.003), and a trial x condition interaction (F(13.804, 1511.569) = 3.052, p < 0.001).
Further examination of this trial x condition interaction revealed that the non-contingent group expressed significantly fewer escape responses from the second to eleventh trials than did the partially-contingent group. The non-contingent group had more escape responses on the first extinction trial than did the fully-contingent group, but fewer than the fully-contingent group on the fourth and eighth trials (all p’s < 0.003). Post-hoc pairwise comparisons indicated that there was a significant difference between the non-contingent condition and the partially-contingent condition (p = 0.002), but not between the fully-contingent condition and either of the other two (both p’s > 0.05).
3.3 Avoidance behavior
Participants learned to not just escape, but to completely avoid the aversive outcome by initiating the hiding response during the WS, before the start of the bomb period. Avoidance hiding increased over the 12 acquisition trials for all three conditions, as suggested by a main effect of trial (mixed-design ANOVA, F(5.497,1203.932) = 208.336, p < 0.001; Fig. 4A). However, avoidance hiding was considerably higher in the non-contingent than in the two contingent conditions. This observation was supported by a main effect of condition (F(2,219) = 16.319, p < 0.001). There was no significant trial x condition interaction (p = 0.058). Post-hoc pairwise tests indicated that there was less avoidance hiding in the fully-contingent conditions than the non-contingent condition (p = 0.002), but no significant difference between the partially-contingent and fully-contingent conditions (p = 0.063).

Avoidance hiding, expressed as percent of the 5-s warning period during which the participant’s ship is in hiding. Error bars represent standard error of the mean. A Avoidance hiding increased across the 12 acquisition trials in all three groups but was higher in the non-contingent group than in the non-contingent and partially-contingent groups, which did not differ. B Avoidance hiding decreased across the 12 extinction trials but was faster to extinguishin in the non-contingent group than the two contingent groups
Participants exhibited a decrease in avoidance hiding across the 12 extinction trials, as suggested by a main effect of trial (F(5.814,1135.249) = 44.213, p < 0.001). There was a main effect of condition for extinction hiding (F(2, 219) = 3.847, p = 0.023), as well as a trial x condition interaction (F(10.368,1135.249) = 2.456, p = 0.006). Post-hoc pairwise tests revealed that the non-contingent condition differed from the fully-contingent condition (p = 0.002) but not the partially-contingent condition (p = 0.861), although the two contingent conditions did not differ (p = 0.099) (Fig. 4B). Further, the non-contingent group had higher avoidance responding than both the partially- and fully-contingent groups on the first and second trials of extinction (all p’s < 0.0002).
Lastly, as in previous analyses of the spaceship task [20, 22], we further analyzed two specific aspects of the avoidance response (AR; defined as a hiding response that starts during the warning period, continues throughout the bomb period and completely prevents any point loss): (1) AR rate, i.e., percentage of trials on which AR was demonstrated; (2) AR duration, i.e., hiding duration during warning period on trials where AR was demonstrated. In the non-contingent condition, AR rate and duration were comparable to performance previously reported with this task (43% and 46%, respectively); however, in both contingent conditions, AR rate was very low (2–7%), suggesting that in almost all cases, the hiding response during the aversive event was not complete.
3.4 Acquisition and extinction of hiding during the ITI
Overall, rates of ITI hiding during acquisition were low (Fig. 5A). There was no main effect of trial (p = 0.086) but there was a main effect of condition (F(2,219) = 20.167, p < 0.001). There was no significant trial x condition interaction (p = 0.72). Subsequent pairwise comparisons revealed less ITI hiding in the non-contingent condition than the partially- and fully-contingent conditions (both p’s < 0.001). There was no significant difference in ITI hiding during acquisition between the partially- and fully-contingent conditions (p = 0.101).

ITI hiding, expressed as percent of the 10-s inter-trial interval (ITI) during which the participant’s ship is in hiding. Error bars represent standard error of the mean. A ITI hiding was low across the 12 acquisition trials, but was greater in the partially- and fully-contingent groups than the non-contingent group. B ITI hiding decreased across the 12 extinction trials in all three groups
Rates of ITI hiding during extinction were also quite low (Fig. 5B). There were main effects of condition (F(2,219) = 4.862, p = 0.009) and trial (F(11,2118.03) = 3.949, p < 0.001), as well as a trial x condition interaction (F(22,2118.03) = 2.373, p < 0.001). Post-hoc comparisons revealed a significant difference between the non-contingent and the partially-contingent conditions (p = 0.006), but not the fully-contingent condition (p = 0.254). There was no significant difference between the partially- and fully-contingent conditions (p = 0.301). Further examination of the interaction revealed that the partially-contingent condition had significantly more hiding during the first five trials and the eighth trial of the ITI extinction period as compared to the non-contingent condition (all p’s < 0.0001). The fully-contingent condition expressed more hiding than the non-contingent condition on the fifth trial (p = 0.0005). The partially-contingent condition had expressed more hiding than the fully-contingent condition on the first and eighth ITI extinction trials (all p’s < 0.001).
4 Discussion
The purpose of the current study was to test how stimulus contingencies, particularly the omission of the warning signal (WS), affect escape/avoidance behavior in humans. Participants were tested with a computer-based task previously shown to capture several features of avoidance paradigms in rodents. Specifically, we compared a non-contingent condition in which hiding resulted in termination or prevention of the aversive event (point loss and on-screen explosions) with two new conditions: a fully-contingent condition where hiding caused termination of all on-screen events including the WS, and a partially-contingent condition where hiding caused omission of the aversive cue (bomb) and the appetitive cue (enemy targets), but did not affect the duration of the WS. The current results showed that, while all conditions showed acquisition and extinction of escape/avoidance hiding, there was less acquisition of avoidance and escape hiding in the two contingent conditions compared to the non-contingent condition. We discuss these results and their implications further below.
4.1 Acquisition of escape/avoidance behavior
One motivation for the two contingent conditions in the current study was to consider a version of the human task which more closely resembles the rodent lever-press task. Specifically, in the standard version of the rodent lever-press task, the subjects are given no information about how to predict, escape, or avoid the aversive foot shock, and if a lever-press occurs during the warning period, the rodent receives no informational feedback about whether that response caused omission of the aversive event, or if the event would have been omitted anyway (e.g. during an extinction trial).
In the “standard” non-contingent condition of the human task, the presence of the bomb cue without explosions and point loss provides visual confirmation that the aversive event (explosions and point loss) has been avoided or escaped, while also signaling that it is not yet safe to emerge from hiding. In the two new contingent conditions of the task, this on-screen information is omitted during hiding, which could cause even a well-trained participant to occasionally emerge from hiding to “check” whether it was now safe—reducing total hiding time. This interpretation is consistent with the lower percentage of escape hiding and avoidance hiding, as well as with the very low avoidance rates in the partially- and fully-contingent conditions, relative to the non-contingent condition. It is also interesting to note the lower escape hiding in both contingent conditions was in spite of the increased presence of warning cues (due to less avoidance hiding), which further strengthens these findings.
On the other hand, we expected that in the fully-contingent condition, the additional removal of the WS during hiding would have facilitated learning of the avoidance response. This would have been consistent with prior findings in rats [28], as well as with Lieberman’s marking hypothesis [34,35,36], in which a salient change such as disappearance of the WS draws attention to the preceding response. Additionally, the disappearance of the WS could provide informational feedback that the avoidance response has successfully averted the upcoming threat. However, compared to the partially-contingent condition, the additional removal of WS during hiding in the fully-contingent condition appeared to have little additional impact: in fact, the fully-contingent condition showed slightly worse performance compared to the partially-contingent condition, although these differences generally fell short of statistical significance. This result was something of a surprise, but suggests that in the human spaceship task, behavior may be more sensitive to the presence or omission of the aversive cue than to the presence or omission of the WS during hiding.
Further, the removal of appetitive targets during the warning period in the two contingent conditions was expected to reduce the incentive to emerge from the safe areas and try to gain points during those periods. In fact, this manipulation appeared to have the opposite effect. One possibility is that the targets functioned as safety signals in the non-contingent group, since they appear during warning period and ITI but not during the bomb period; thus, reappearance of targets following the bomb period serves as informational feedback that it is now “safe” to emerge from hiding. This may have allowed participants in the non-contingent condition to remain in hiding for the duration of the bomb period, rather than need to emerge early to “check” if the threat period had passed. Accordingly, it also allowed these participants to spend less time hiding during the ITI period, when feedback regarding “safety” was provided.
The current study did not manipulate the aversive and appetitive cues separately, but prior work with the spaceship avoidance task has selectively considered the role of safety signals by adding an explicit on-screen safety signal that appeared during the ITI [22]. This addition impaired acquisition of avoidance hiding, although only in female participants. Nevertheless, given the prior study in which that addition of a safety signal reduced avoidance hiding, it appears unlikely in the current study that the elimination of a safety signal caused the reduction in avoidance hiding observed in the contingent conditions. Instead, it appears more likely that omission of the aversive cue may be driving the observed effects. Obviously, future work could test this interpretation by comparing conditions where either the appetitive or aversive cues are selectively removed during hiding.
4.2 Extinction of avoidance behavior
Both fully- and partially-contingent conditions showed lower avoidance responding during the first few trials of extinction, and slower extinction overall, relative to the non-contingent condition. The current finding is a novel effect since, to our knowledge, extinction has not been tested previously in the rodent lever-press avoidance paradigm with contingent or non-contingent WS termination. However, the finding is generally consonant with a prior rodent study indicating that omission of safety signals can slow extinction [37]. In the non-contingent condition, the appearance of the aversive cue during the bomb period in the acquisition phase may have encouraged participants to remain in hiding—either for fear of point loss or because the aversive cue had itself become associated with the hiding response, or both. This is probably what is happening during the first few extinction trials. It would not be until participants happened to venture out into the open during a bomb period that they would realize that point loss and explosions did not occur. However, following this realization, extinction would be expected to occur quickly. In fact, after the first two extinction trials, avoidance hiding in the non-contingent condition quickly declined to the low levels observed in the partially- and fully-contingent groups. It may also be worthy of mention that, although the two contingent groups did not differ on either escape/avoidance hiding during acquisition, the partially-contingent group showed slightly more hiding than the fully-contingent group during extinction. While these differences did not rise to statistical significance in the current study, it is possible that follow-up studies with larger cohorts might detect a difference.
Understanding the factors that increase or decrease extinction is potentially important; maintaining a previously-useful avoidance behavior, even when the WS is no longer followed by the aversive event, is maladaptive. In fact, pathological avoidance is not typically defined based on whether the individual learns to avoid threat, but rather on the persistence of the avoidance response when the threat is no longer present, i.e. impaired extinction. In the literature, sustained avoidance responding during extinction is related to anxiety and PTSD [38,39,40,41], and thus, the inclusion of extinction training would be a valuable component in future avoidance studies. Despite the centrality of extinction to understanding pathological avoidance, many laboratory studies of avoidance learning focus on acquisition but lack an extinction phase. The current study indicates that extinction training may reveal differences that may be relevant to designing extinction-based therapies for anxiety and addiction.
5 Future work
Future work could continue to explore task manipulations to further understand how contingencies between behavior and stimuli affect avoidance behavior. In the current study, we tested how the termination of both aversive and appetitive cues by the hiding response alters escape or avoidance response. In light of prior evidence that appearance of appetitive cues affects avoidance behavior (e.g., [22]), it would be interesting to test the omission of appetitive and aversive cues separately. In addition, either Pavlovian contingency or instrumental contingency can be manipulated. While we implemented instrumental contingencies here (relationship between behavior and outcome), future studies could focus on manipulating Pavlovian contingency, i.e., altering the reliability with which the WS predicts the aversive event. Manipulating such reliability could shed light on possible mechanisms underlying the WS contingency effects observed here and in rodents, specifically whether response-contingent termination of WS facilitates avoidance learning primarily because of informational feedback (as in Lieberman’s marking hypothesis), because the WS itself has acquired aversive properties (as the “two-factor theory”) and so removal of the WS becomes a reinforcing event in itself, or a combination of the two.
Uncertainty has been implicated as a major factor in anxiety disorders [42] and exaggerated avoidance behavior [43]. Recent work with classical eyeblink conditioning has revealed that learning protocols that involve some degree of uncertainty produce more enhancement of acquisition in anxiety vulnerable individuals as compared to protocols where a cue reliably predicts the outcome [44,45,46,47]. In a more recent study of partial predictability, in which only half of the WS’s were followed by the foot shock, anxiety-vulnerable Wistar-Kyoto rats acquired avoidance learned responses, while a control strain of non-vulnerable Sprague Dawley rats failed to acquire avoidance to any significant degree [48]. Other personality vulnerability factors for anxiety disorders (e.g., behaviorally-inhibited temperament) could also be associated with avoidance behavior on the current task [20, 22]. Cognitive skills that are impaired in psychiatric disorders (e.g., temporal discrimination) could also facilitate performance on task conditions with omitted information by improving temporal estimation of various events [49,50,51]. It is possible that temporal discrimination could be easier to acquire in the non-contingent and partially-contingent conditions where the WS has a fixed duration of 5 s, and thus, cognitive skills that improve temporal discrimination could have a differential effect on the various task conditions. Temporal discrimination can also improve accuracy of avoidance responding, by helping participants to hide in the last interval of the WS. Future work could test the temporal responding during the various task periods, as well as the association between contingency manipulations on the spaceship task, specific anxiety-vulnerabilities and cognitive skills that improve temporal discrimination.
A limitation of this study and prior findings is that the participants’ knowledge of the contingencies was not directly assessed and could only be inferred based on participants’ actions. It would be of interest in the future to include a post-task questionnaire in which the participants report their awareness of the contingencies. Such self-reported knowledge could be examined in relation to patterns of escape and avoidance behavior as well as overall strategies in attempting to maximize points in the task. Another limitation of the current study is that, although an effort was made to recruit participants from two geographically distinct sites within the U.S., representing a number of ethnicities and races, it is still the case that the study sample represents a population that exemplifies what have been termed Western, Educated, Industrialized, Rich and Democratic (WEIRD) societies [52]. As such, it is possible that the current results may not generalize beyond a WEIRD sample. Additionally, while female gender has been implicated as a risk factor for avoidance, and prior studies with the spaceship avoidance task did identify some gender differences [20, 22], our current study was underpowered to examine gender as a variable. Overall, in the current study, females were numerically faster to acquire avoidance hiding than males (results not shown); although this result did not reach statistical significance, it is nevertheless consistent with prior studies that found better avoidance learning by females on this task. Future studies could profitably consider more diverse, non-Western populations and also specifically examine gender as a variable.
Prior work with the spaceship avoidance task also included a computational model using a reinforcement-learning algorithm [53]. Model simulations indicated that the sensitivity to punishment as well as the ratio between sensitivity to reward and sensitivity to punishment modulated avoidance hiding behavior. In addition, the mechanisms that produced enhanced acquisition also produced slower extinction. The computational model was also used to simulate the attenuating effects of safety signals and suggested that the decreased avoidance is the result of facilitation of the competing approach behavior (hitting enemy targets) on this task. Future work could leverage this computational model for simulating the omission manipulations reported in this work.
Although not all the results in the current study were as expected, the basic finding confirms that, in a task of human escape/avoidance learning, manipulation of cue contingencies does affect acquisition and extinction of the avoidance response. To the extent that accelerated avoidance is part of the profile in several human disorders, a better understanding of this issue has direct clinical implications. Both escape and avoidance responses are key components of coping behaviors in the face of stressors. On the one hand, the ability to avoid aversive events is often highly adaptive, but it can become maladaptive when an individual first finds a way to escape from a stressful situation and then generalizes that strategy to avoid the situation altogether—a policy which can become dysfunctional if the warning signal is only weakly predictive of the stressor or if there is subsequent unpairing of the warning signal and stressor without extinction of the avoidance response. The ability to separately study escape and avoidance responses, as well as the transition from escape to avoidance, parallels rodent avoidance paradigms and is expected to facilitate our understanding of the symptomology in stress-related psychiatric conditions [54].
6 Conclusions
The current study revealed that avoidance learning can be affected by the omission of aversive and appetitive cues, or omission of both those cues and the WS that predicts the upcoming aversive event. These omissions reduced both escape and avoidance hiding, indicating that in humans as in rodent models, omission contingencies can affect avoidance learning. In addition, the consistency of findings across two sites with diverse undergraduate samples supports the strong reliability of this computer-based task, as well as its utility as an avoidance task for use with human participants.
Data availability
Available from the corresponding author on reasonable request.
References
Diagnostic and Statistical Manual of Mental Disorders: DSM-5. American Psychiatric Association, 2013;5th Ed. Washington, DC.
Chang CM, Lee LC, Connor KM, Davidson JR, Jeffries K, Lai TJ. Posttraumatic distress and coping strategies among rescue workers after an earthquake. J Nerv Ment Dis. 2003;191(6):391–8. https://doi.org/10.1097/01.NMD.0000071588.73571.3D.
Charlton PF, Thompson JA. Ways of coping with psychological distress after trauma. Br J Clin Psychol. 1996;35(4):517–30. https://doi.org/10.1111/j.2044-8260.1996.tb01208.x.
Gil S, Caspi Y. Personality traits, coping style, and perceived threat as predictors of posttraumatic stress disorder after exposure to a terrorist attack: a prospective study. Psychosom Med. 2006;68(6):904–9. https://doi.org/10.1097/01.psy.0000242124.21796.f8.
Marmar CR, Weiss DS, Metzler TJ, Delucchi K. Characteristics of emergency services personnel related to peritraumatic dissociation during critical incident exposure. Am J Psychiatry. 1996;153(7 Suppl):94–102. https://doi.org/10.1176/ajp.153.7.94.
Curtin JJ, Barnett NP, Colby SM, Rohsenow DJ, Monti PM. Cue reactivity in adolescents: measurement of separate approach and avoidance reactions. J Stud Alcohol. 2005;66(3):332–43. https://doi.org/10.15288/jsa.2005.66.332.
Vuchinich RE, Tucker JA. Alcoholic relapse, life events, and behavioral theories of choice: a prospective analysis. Exp Clin Psychopharmacol. 1996;4(1):19.
Westrup DA. Experiential avoidance and alcohol dependence relapse: West Virginia University; 1999.
Forsyth JP, Parker JD, Finlay CG. Anxiety sensitivity, controllability, and experiential avoidance and their relation to drug of choice and addiction severity in a residential sample of substance-abusing veterans. Addict Behav. 2003;28(5):851–70. https://doi.org/10.1016/s0306-4603(02)00216-2.
Andreatta M, Michelmann S, Pauli P, Hewig J. Learning processes underlying avoidance of negative outcomes. Psychophysiology. 2017;54(4):578–90. https://doi.org/10.1111/psyp.12822.
Rattel JA, Miedl SF, Blechert J, Wilhelm FH. Higher threat avoidance costs reduce avoidance behaviour which in turn promotes fear extinction in humans. Behav Res Ther. 2017;96:37–46. https://doi.org/10.1016/j.brat.2016.12.010.
Evans TC, Rodriguez AM, Britton JC. Sympathetic and self-reported threat reactivity in social anxiety: modulation by threat certainty and avoidance behavior. J Psychopathol Behav Assess. 2019;41:627–38.
Hunt C, Cooper SE, Hartnell MP, Lissek S. Anxiety sensitivity and intolerance of uncertainty facilitate associations between generalized Pavlovian fear and maladaptive avoidance decisions. J Abnorm Psychol. 2019;128(4):315–26. https://doi.org/10.1037/abn0000422.
Hulsman AM, Kaldewaij R, Hashemi MM, Zhang W, Koch SBJ, Figner B, et al. Individual differences in costly fearful avoidance and the relation to psychophysiology. Behav Res Ther. 2021;137: 103788. https://doi.org/10.1016/j.brat.2020.103788.
Papalini S, Ashoori M, Zaman J, Beckers T, Vervliet B. The role of context in persistent avoidance and the predictive value of relief. Behav Res Ther. 2021;138: 103816. https://doi.org/10.1016/j.brat.2021.103816.
Pittig A, Boschet JM, Gluck VM, Schneider K. Elevated costly avoidance in anxiety disorders: patients show little downregulation of acquired avoidance in face of competing rewards for approach. Depress Anxiety. 2021;38(3):361–71. https://doi.org/10.1002/da.23119.
Wong AHK, Pittig A. A dimensional measure of safety behavior: a non-dichotomous assessment of costly avoidance in human fear conditioning. Psychol Res. 2022;86(1):312–30. https://doi.org/10.1007/s00426-021-01490-w.
Xia W, Dymond S, Lloyd K, Vervliet B. Partial reinforcement of avoidance and resistance to extinction in humans. Behav Res Ther. 2017;96:79–89. https://doi.org/10.1016/j.brat.2017.04.002.
Aupperle RL, Sullivan S, Melrose AJ, Paulus MP, Stein MB. A reverse translational approach to quantify approach-avoidance conflict in humans. Behav Brain Res. 2011;225(2):455–63. https://doi.org/10.1016/j.bbr.2011.08.003.
Sheynin J, Beck KD, Pang KC, Servatius RJ, Shikari S, Ostovich J, et al. Behaviourally inhibited temperament and female sex, two vulnerability factors for anxiety disorders, facilitate conditioned avoidance (also) in humans. Behav Processes. 2014;103:228–35. https://doi.org/10.1016/j.beproc.2014.01.003.
Molet M, Leconte C, Rosas JM. Acquisition, extinction and temporal discrimination in human conditioned avoidance. Behav Processes. 2006;73(2):199–208. https://doi.org/10.1016/j.beproc.2006.05.009.
Sheynin J, Beck KD, Servatius RJ, Myers CE. Acquisition and extinction of human avoidance behavior: attenuating effect of safety signals and associations with anxiety vulnerabilities. Front Behav Neurosci. 2014;8:323. https://doi.org/10.3389/fnbeh.2014.00323.
Sheynin J, Moustafa AA, Beck KD, Servatius RJ, Casbolt PA, Haber P, et al. Exaggerated acquisition and resistance to extinction of avoidance behavior in treated heroin-dependent men. J Clin Psychiatry. 2016;77(3):386–94. https://doi.org/10.4088/JCP.14m09284.
Sheynin J, Myers CE, Ghafar F, Morris AN, Morley KC, Haber PS, et al. A pilot study of escape, avoidance, and approach behaviors in treated alcohol-dependent males. J Clin Exp Neuropsychol. 2019;41(6):601–14. https://doi.org/10.1080/13803395.2019.1595530.
Sheynin J, Shind C, Radell M, Ebanks-Williams Y, Gilbertson MW, Beck KD, et al. Greater avoidance behavior in individuals with posttraumatic stress disorder symptoms. Stress. 2017;20(3):285–93. https://doi.org/10.1080/10253890.2017.1309523.
Sheynin J, Baetu I, Collins-Praino LE, Myers CE, Winwood-Smith R, Moustafa AA. Maladaptive avoidance patterns in Parkinson’s disease are exacerbated by symptoms of depression. Behav Brain Res. 2020;382: 112473. https://doi.org/10.1016/j.bbr.2020.112473.
Bolles RC, Stokes LW, Younger MS. Does CS termination reinforce avoidance behavior? J Comp Physiol Psychol. 1966;62(2):201–7. https://doi.org/10.1037/h0023678.
Avcu P, Jiao X, Myers CE, Beck KD, Pang KC, Servatius RJ. Avoidance as expectancy in rats: sex and strain differences in acquisition. Front Behav Neurosci. 2014;8:334. https://doi.org/10.3389/fnbeh.2014.00334.
Mowrer OH. Two-factor learning theory reconsidered, with special reference to secondary reinforcement and the concept of habit. Psychol Rev. 1956;63(2):114–28. https://doi.org/10.1037/h0040613.
Mowrer OH, Lamoreaux RR. Avoidance conditioning and signal duration—a study of secondary motivation and reward. Psychol Monogr. 1942;54(5):i.
Meyer PA. Role of an unavoidability procedure in eliminating avoidance behavior with humans. J Exp Psychol. 1970;86(2):337.
Krypotos AM, Vervliet B, Engelhard IM. The validity of human avoidance paradigms. Behav Res Ther. 2018;111:99–105. https://doi.org/10.1016/j.brat.2018.10.011.
Faul F, Erdfelder E, Buchner A, Lang AG. G* Power Version 3.1. 7 [computer software]. Uiversität Kiel, Germany. 2013.
Thomas GV, Lieberman DA, McIntosh DC, Ronaldson P. The role of marking when reward is delayed. J Exp Psychol Anim Behav Process. 1983;9(4):401–11.
Lieberman DA, Davidson FH, Thomas GV. Marking in pigeons: the role of memory in delayed reinforcement. J Exp Psychol Anim Behav Process. 1985;11(4):611.
Lieberman DA, Thomas GV. Marking, memory and superstition in the pigeon. Q J Exp Psychol. 1986;38(4):449–59.
Beck KD, Jiao X, Ricart TM, Myers CE, Minor TR, Pang KC, et al. Vulnerability factors in anxiety: strain and sex differences in the use of signals associated with non-threat during the acquisition and extinction of active-avoidance behavior. Prog Neuropsychopharmacol Biol Psychiatry. 2011;35(7):1659–70. https://doi.org/10.1016/j.pnpbp.2011.05.002.
Milad MR, Rosenbaum BL, Simon NM. Neuroscience of fear extinction: implications for assessment and treatment of fear-based and anxiety related disorders. Behav Res Ther. 2014;62:17–23. https://doi.org/10.1016/j.brat.2014.08.006.
VanElzakker MB, Dahlgren MK, Davis FC, Dubois S, Shin LM. From Pavlov to PTSD: the extinction of conditioned fear in rodents, humans, and anxiety disorders. Neurobiol Learn Mem. 2014;113:3–18. https://doi.org/10.1016/j.nlm.2013.11.014.
Dymond S. Overcoming avoidance in anxiety disorders: the contributions of Pavlovian and operant avoidance extinction methods. Neurosci Biobehav Rev. 2019;98:61–70. https://doi.org/10.1016/j.neubiorev.2019.01.007.
Urcelay GP, Prével A. Extinction of instrumental avoidance. Curr Opin Behav Sci. 2019;26:165–71.
Grupe DW, Nitschke JB. Uncertainty and anticipation in anxiety: an integrated neurobiological and psychological perspective. Nat Rev Neurosci. 2013;14(7):488–501. https://doi.org/10.1038/nrn3524.
Flores A, Lopez FJ, Vervliet B, Cobos PL. Intolerance of uncertainty as a vulnerability factor for excessive and inflexible avoidance behavior. Behav Res Ther. 2018;104:34–43. https://doi.org/10.1016/j.brat.2018.02.008.
Allen MT, Myers CE, Servatius RJ. Avoidance prone individuals self reporting behavioral inhibition exhibit facilitated acquisition and altered extinction of conditioned eyeblinks with partial reinforcement schedules. Front Behav Neurosci. 2014;8:347. https://doi.org/10.3389/fnbeh.2014.00347.
Holloway JL, Allen MT, Myers CE, Servatius RJ. Behaviorally inhibited individuals demonstrate significantly enhanced conditioned response acquisition under non-optimal learning conditions. Behav Brain Res. 2014;261:49–55. https://doi.org/10.1016/j.bbr.2013.10.041.
Allen MT, Myers CE, Servatius RJ. Uncertainty of trial timing enhances acquisition of conditioned eyeblinks in anxiety vulnerable individuals. Behav Brain Res. 2016;304:86–91. https://doi.org/10.1016/j.bbr.2016.02.007.
Allen MT, Handy JD, Blankenship MR, Servatius RJ. The distressed (Type D) personality factor of social inhibition, but not negative affectivity, enhances eyeblink conditioning. Behav Brain Res. 2018;345:93–103. https://doi.org/10.1016/j.bbr.2018.02.035.
Miller DP, Allen MT, Servatius RJ. Partial predictability in avoidance acquisition and expression of Wistar-Kyoto and Sprague-Dawley rats: implications for anxiety vulnerability in uncertain situations. Front Psychiatry. 2020;11:848. https://doi.org/10.3389/fpsyt.2020.00848.
Rammsayer T. Temporal discrimination in schizophrenic and affective disorders: evidence for a dopamine-dependent internal clock. Int J Neurosci. 1990;53(2–4):111–20. https://doi.org/10.3109/00207459008986593.
Molet M, Callejas-Aguilera JE, Rosas JM. Latent timing in human conditioned avoidance. J Exp Psychol Anim Behav Process. 2007;33(4):476–83. https://doi.org/10.1037/0097-7403.33.4.476.
Alcala JA, Callejas-Aguilera JE, Lamoureux JA, Rosas JM. Discrimination reversal facilitates subsequent acquisition of temporal discriminations in rats’ appetitive conditioning. J Exp Psychol Anim Learn Cogn. 2019;45(4):446–63. https://doi.org/10.1037/xan0000216.
Henrich J, Heine SJ, Norenzayan A. The weirdest people in the world? Behav Brain Sci. 2010;33(2–3):61–83. https://doi.org/10.1017/S0140525X0999152X. (discussion-135).
Sheynin J, Moustafa AA, Beck KD, Servatius RJ, Myers CE. Testing the role of reward and punishment sensitivity in avoidance behavior: a computational modeling approach. Behav Brain Res. 2015;283:121–38. https://doi.org/10.1016/j.bbr.2015.01.033.
Haskell AM, Britton PC, Servatius RJ. Toward an assessment of escape/avoidance coping in depression. Behav Brain Res. 2020;381: 112363. https://doi.org/10.1016/j.bbr.2019.112363.
Acknowledgements
We would like to thank Nicole Anastasides, Asma Jafri and Michelle Garcia for assistance with data collection.
Disclosure
The contents do not represent the views of the U.S. Department of Veterans Affairs or the United States Government.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
Design and conceptualization of the study: MTA, JS, CEM. Recruitment, data collection, data processing and statistical analysis: MTA, JS. All authors contributed to the drafting of the manuscript and approved the final version.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Approval was obtained from the ethics committee of New Jersey Institute of Technology, University of Medicine and Dentistry of New Jersey, and University of Northern Colorado. The procedures used in this study adhere to the tenets of the Declaration of Helsinki.
Consent for publication
Informed consent was obtained from all individual participants included in the study.
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Allen, M.T., Sheynin, J. & Myers, C.E. Acquisition and extinction of human avoidance behavior: attenuating effects of omission contingencies of appetitive, aversive and warning cues. Discov Psychol 4, 18 (2024). https://doi.org/10.1007/s44202-024-00117-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44202-024-00117-6