
Abstract
Experiential learning in biomedical engineering curricula is a critical component to developing graduates who are equipped to contribute to technical design tasks in their careers. This paper presents the development and implementation of an undergraduate and graduate-level soft material robotics design course focused on applications in medical device design. The elective course, offered in a bioengineering department, includes modules on technical topics and hands-on projects relevant to readings, all situated within a human-centered design course. After learning and using first principles governing soft robot design and exploring literature in soft robotics, students propose a new advance in the field in a hands-on design and prototype project. The course described here aims to create a structure to engage students in fabrication and the design approaches taken by practitioners in a specific field, applied here in soft robotics, but applicable to other areas of biomedical engineering. This teaching tips article details the pedagogical tools used to facilitate design and collaboration within the course. Additionally, we aim to highlight ways in which the course creates (1) opportunities to engage undergraduates in design in preparation for capstone courses, (2) outward facing opportunities to connect with practitioners in the field, and (3) the ability to adapt this hands-on experience within a typical lecture structure as well as a hybrid online and in-person offering, thus expanding its utility in bioengineering departments. We reflect on course elements that can inform future design-based course offerings in soft robotics and other design-based multidisciplinary fields in bioengineering.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Challenge Statement
Design education is a cornerstone of an undergraduate engineering curriculum [1, 2]. Capstone design courses prepare students for the engineering workforce by replicating the work of practicing engineers through projects that involve teamwork and application of first principles and standards of engineering. However, in many cases, capstone design courses may be the first time students are facing the open-ended, multifaceted expectations of design projects, including physical prototyping. Given the broad range of topics relevant to bioengineers, often times the curriculum leaves little room for new courses dedicated to prototyping skill practice and development. Examples demonstrating how project-based and hands-on learning is incorporated into bioengineering coursework can help to expand these practices in bioengineering departments and foster students’ technical skill development. Additionally, this practice can help to better prepare students for capstone design courses in undergraduate bioengineering education.
Toward fulfilling Accreditation Board for Engineering and Technology (ABET) standards for engineering education, specifically Criterion 3 (Student Outcomes) and Criterion 5 (Curriculum), undergraduate biomedical engineering programs culminate in a curricular design experience [3,4,5]. Capstone design courses require students to work independently, practice project management skills, and—especially in biomedical engineering—apply engineering skills to a wide variety of healthcare-related topics. It therefore benefits engineering students to experience design curricula throughout their undergraduate programs to practice applying engineering knowledge toward generating new ideas. Developing and adapting courses to provide this structured design experience early in engineering programs may also better prepare graduating students for the experience of entering the engineering workforce. The need for bioengineering students to develop confidence in technical prototyping motivated development of this course, offered to undergraduates, in our department. We aim to increase project-based and hands-on technical prototyping experiences prior to a culminating capstone course.
Soft robotics is a design-based field that sits at the intersection of multiple engineering disciplines to develop technologies for healthcare applications. This subfield of robotics involves the use of low-modulus, often hyperelastic, materials in the design of electromechanical devices. Soft robots are inherently linked to human-centered design, healthcare, and biomedical engineering because of the inherent safety of soft materials, compliance matching with the human body, and bioinspired designs [6]. Soft robots interface with humans by replacing rigid components with mechanically programmed polymers and flexible electronics [7]. The emergence of soft robotics as a research field is a relatively recent phenomenon [8] and has led to the development of bioinspired machines [6], compliant grippers for delicate objects [9], soft exoskeletons [10], and implantable medical devices [11], among others. Bioengineers are a growing cohort of contributors to soft robotics, contributing a greater expertise than they do in traditional robotics research (Fig. 1). Therefore, developing coursework to foster interest and train bioengineering students in foundations of this design-based field can help to advance healthcare applications of soft robotics in the future.

Breakdown of home departments of academic-based principal investigators in the fields of robotics (left) or soft robotics (right). Bioengineers (BE) comprise 4% and 19% of these fields, respectively. Data collected from a survey of the top 20 engineering programs. See supplemental materials for data collection protocol
We recently established a multi-institution extracurricular undergraduate research program [12] in which students learn soft robotics techniques and engage in a design-based research project. The popularity of this initiative led us to think of ways in which we could expand its reach. We hypothesize that a new and developing field such as soft robotics, which continues to develop its research community [13], may serve as a platform to train students in engineering design in courses. Course-based research experiences have proven particularly valuable in broadening access to authentic research experiences and influencing student career plans given the limited number of summer research positions available [14].
There may also be additional benefits to developing undergraduate courses in interdisciplinary robotics fields. Traditional robotics instruction and extracurriculars [15] have focused on robot competitions and autonomous applications in which robots are isolated from humans. This focus may be a factor in the well-recognized lack of diversity in the field of robotics [16] as well as majors commonly associated with robotics, including mechanical and electrical engineering [17]. It has been found, for example, that women-identifying students tend to be more attracted to practical, human-centered applications rather than task-oriented problems [18, 19]. At the same time, the low barrier to entry [20], affordable materials, and potential for fabrication with readily accessible tools and equipment open the door to both in-person and online course development. The accessibility of the field for developing engineers, combined with its opportunity to appeal to a diversity of students, highlights the opportunity associated with developing a hands-on soft robotics course in bioengineering and biomedical engineering departments.
Previously, soft robotics courses have been implemented in a number of medical device design contexts [21,22,23] and to expand the fabrication toolkit for architecture and engineering students [24]. In addition to courses that have been reported on in literature, a review of course websites that are publicly available shows that about half of the U.S. News and World Report top 10 engineering schools offer soft robotics courses. Many institutions have courses in medical robotics or human–robot interface-focused courses. However, traditional medical device design courses have focused on electromechanical aspects [25]. Those courses may overlap with the topics covered in the course described in this paper; however, there is limited evidence of these courses housed in bioengineering and biomedical engineering departments. For the course described in this paper, we build off the materials in the Soft Robotics Toolkit [26] but also expand it to include additional education materials around biology and materials science. This provides the potential to attract a more diverse population of students to robotics careers in general, and medical device design careers in particular, by addressing applications of engineering that are not currently addressed in traditional robotics curricula. This interdisciplinarity mimics most bioengineering and biomedical engineering departments in which foundational knowledge from many fields is applied to biological challenges. In this paper, we describe a unique effort to implement a soft robotics course in a bioengineering department, designed to build on the skills students have and need. Within this course, we aim to provide bioengineering students with opportunities to apply knowledge from multiple fields to learn design through practice and engage with practitioners actively working in this field.
Novel Initiative
Institutional Context and Course
Introduction to Soft Robotics (BIOE498/598) is a technical elective course that is open to undergraduate juniors and seniors, Masters, and PhD students. The demographics of students enrolled in the course mirror those of the department; at the University of Illinois Urbana-Champaign (UIUC) approximately 56% of the undergraduate students identify as women [27]. At UIUC we begin curricular design modules as early as first year [27] to inform a collaborative capstone design experience that is delivered across undergraduate, Masters of Engineering, and Medical student curricula [28]. Set at a capacity of 45 students, BIOE498/598 is offered as a lecture-style course wherein some lectures are held in a lab setting, allowing time for building and prototyping without the scheduling constraints of a longer lab period.
Learning Objectives
The stated learning objectives of the course are:
-
Apply fundamentals of polymer chemistry and sensors to understanding wearable devices and soft robots.
-
Discuss current literature in the discipline.
-
Build actuators and sensors using polymer molding and fabrication techniques.
-
Design advances in bioinspired, wearable, or implantable soft robots.
-
Students will be assessed based on in-class problems, a design project, and journal club presentations.
When developing the course, the pros and cons of offering the course in a “lecture slot” were evaluated. In this specific context, the lecture format was often more attractive to students, given scheduling and credit hours (i.e., 3cr. for lecture vs. 4cr. for lab). This offering is also more attractive to departments as scheduling lab spaces can be difficult and staffing for laboratory courses is limited. When developed as a lecture course, BIOE498/598 benefits from increased staffing availability, flexibility in location, and ease of fitting into student schedules. As developed, the course meets twice per week in 80-minute lectures that are held in a traditional classroom. Hands-on activities are completed in a variety of spaces including at students’ homes (with prepared kits), in the lecture hall, or in a modular design space that is open during lecture time. Throughout the semester, students engage with course material in a variety of ways, as detailed in the timeline in Fig. 2. Students hear lectures on various topics, and present journal club on research advances within those topics, build simple actuators, sensors, and controls, and participate in a design project. This paper describes the overall course structure and details specific to the soft robotics context, with the goal that others can implement similar courses at their own institutions.

Timeline of BIOE498/598 Introduction to Soft Robotics course. Classroom activities include lectures (L1–11) and assignments such as group problem sets and individual journal club presentations. Laboratory activities include five project builds (B1–5). The design project consists of ideation, pitches, design reviews, and final presentations, both written and oral
Introduction to the Field: Lecture Content
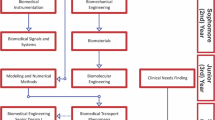
Soft robotics is a growing research topic [9]. The latest developments are constantly evolving, even within the timescale of the course offering. To illustrate the rapid pace of the growing field to students, newly published articles are discussed within the course. Topics span multiscale considerations in biology, materials science, mechanics, and design (Fig. 3). Once students understand material properties at the microscale [29], the compounding impacts of material properties on macroscale material [30] and actuator function are considered, allowing students to explore trade-offs in design [21] and understand challenges in engineering for human-centered applications [31]. To further facilitate an “on-demand” lecture style, students provide feedback on future lecture topics by collaboratively pinning topics on digital whiteboards in class. While this necessitates that instructors are flexible and possibly have prepared more topics than time allows in the course, this practice involves students in determining the direction of the course, promoting engagement in and ownership of course material.

The BIOE498/598 Introduction to Soft Robotics course includes lectures on a variety of topics across multiple spatial scales. Figure created using BioRender.com
Practical Considerations to Device Design: Hands-On Builds
Students follow published protocols to build five foundational elements of soft robotic devices: (B1) a fabric-based pneumatic wearable [32], (B2) a textile-based capacitance sensor [33], (B3) a silicone-based soluble insert pneumatic network actuator [34], (B4) a tendon-actuated silicone finger [20], and (B5) a microcontroller-driven motor control system. While derived from academic research, many of the fabrication guides have been adapted for the classroom setting and are freely available on the Soft Robotics Toolkit online repository [26]. Dependent on enrollment, students complete these builds in open lecture sessions that are hosted in a design lab maker space in the Bioengineering department or at home. Kits are assembled and distributed to students at the start of the semester to facilitate both synchronous and asynchronous interaction with the materials.
Analyzing the State of the Art: Course Assignments
Course assignments are intended to provide students with multiple modalities to engage with the content and to emphasize the ways in which researchers communicate their work.
-
Journal club students are assigned a repository of journal articles related to (but not covered in) lectures throughout the semester. With a provided template (See Supplementary Material), students present on a selected paper covering research topics that overlap with course content and their own interests.
-
Problem sets students work in groups to complete problem sets focused on analysis or design problems derived from literature or challenges faced in the field of soft robotics (See Supplemental Materials for Example Problems).
-
Online conferences with the goal of community engagement and communication training in mind, students attend talks hosted online and, in one semester, attended a virtual robotics conference. Students select talks from a bioinspired robotics or soft robotics session, attended in groups, and then presented findings and reflections to the class as part of a problem set assignment.
-
-
Build reports hands-on build projects culminate in a report (Fig. 4 bottom) in which students conduct a literature review of current applications of that technique (I), document their build process (II), analyze the design and critique the build instructions or products (III), and propose a new application of each technology (IV). Within each build report, students are asked to identify (1) ways in which the lab could be improved (materials, instructions, components), and (2) an application for the actuator, sensors, or control system.

Build summary. Throughout the semester, students complete five introductory build activities in a course laboratory maker space: (B1) a textile pneumatic actuator, (B2) a textile sensor, (B3) a silicone pneumatic actuator, (B4) a silicone tendon actuator, and (B5) creating a control system for the tendon actuator. After each build, students complete a slide deck report that includes (I) a literature review of the state-of-the-art, (II) photo and written documentation of the build, (III) a critique and suggested improvement for the instructions or physical build, and (IV) a proposal for an application or update to the activity
Engaging in Biomedical Design: Independent Project
Once students develop a foundation in soft robotics from lectures and labs, they are asked to develop a design project. The design project is completed over the second half of a semester and is intended to build upon and leverage the research students have studied and the hands-on builds they complete in the first half of the semester. In the first half of the class, students are trained in ideation. This is accomplished in each build activity, journal club, and the focus of the “Needs Identification and Design Ideation” lecture topic (L5) that is completed using Design Heuristics cards [35]. During the independent project, students form groups and the design can be based on their build report ideation (Report, Part IV) or may be a new idea developed by the team. Students complete multiple design cycles (Proposal pitch, design review) and a final technical report (~ 5 pages in length) and an oral presentation. To further promote engagement with the technical community, students are encouraged to submit their reports to external competitions including the Soft Robotics Toolkit competition and the Design of Medical Devices student showcase, while some students under the guidance of the instructor co-authored a review paper [36] or continued research resulting in conference papers [37, 38].
Reflection
This elective bioengineering course provides opportunities for students to learn (1) technical details of a growing robotics subfield and (2) practical prototyping skills, as well as practice in (3) outreach and communication to professionals in the field and (4) multidisciplinary engineering design. In all aspects of the course design, students are engaged in analysis of current state-of-the-art (in Problem Sets and Journal Club presentations) and iterative feedback and design cycles themselves (in Builds and Build Reports within the design project). The goal of this continuous improvement format is to increase student confidence in reading and understanding new research, as well as critiquing designs and suggesting improvements. The design project, completed over the second half of the semester, benefitted from the regular ideation in which students practiced in the first half of the course. In this reflection, we provide (1) student feedback on the course structure as well as (2) instructor reflection on opportunities and challenges to implementation.
Student Feedback
To understand how a soft robotics course may enhance the curricular experience for bioengineering students, we analyze (1) student feedback on the course, (2) student critique and suggestions for improvement in three builds, and (3) areas that students chose to apply soft robotics learnings in a design project using institutional IRB-approved data collection methods (Redacted for review IRB #). Table 1 details a thematic analysis of student feedback on the course, collected in anonymous, university-wide course and instructor evaluations provided to the instructor after the semester. Questions included “What are the strengths or weakness of the course?” and “What are the strengths or weakness of the instructor?” The highlights of the course for students were the hands-on and design projects. One student stated, “I really enjoyed the hands-on projects and labs. I think the BIOE curriculum could benefit from more design and hands-on courses. It could help students develop skills even further.” Students recognized that the course format supported student participation and student creativity. One student commented that the format “helped stimulate innovative thinking for a new subject to most students.” Lastly, students observed how well the course transitioned to an online format: “[I] enjoyed being able to complete all of the builds from home with the given materials.” Students generally noted how different the structure of this course was compared to other courses in the department, highlighting their desire to engage in design-based courses earlier in their career. Student responses to the course feedback survey were qualitatively sorted [39, 40]. We identified five main themes based on the content of the text. Each student’s feedback was thematically coded as belonging to one, unique theme. The themes which emerged are detailed in Table 1.
As part of the university-wide evaluation, students also responded to Likert-scale questions. The Likert-scale items yielded the following results (mean values, out of a possible score of 5, where 1 = No, Not Much and 5 = Yes, Significantly): Did you improve your ability to apply principles in new situations? (4.55), Did you improve your ability to solve real problems in this field? (4.36), This course was intellectually stimulating (4.73), Was the progression of the course logical and coherent from beginning to end? (4.55), The relevance between the subject matter and real-life situations was emphasized (4.73), Rate the overall quality of the course (4.82).
In the future, data collection from students can be expanded to include quantitative surveys of identity development [41] or design self-efficacy [42]. These types of measures may help instructors to understand how project-based courses impact student attitudes toward engineering and technical careers.
As courses were forced online over the years of the COVID-19 pandemic, modality flexibility has become a desirable feature in academic classes. In this course, instructor impressions and student feedback were positive about the ability to distribute kits to online students, further illustrating how the accessibility of the soft robotics field implicates a class format that can be agile and responsive to societal dynamics. To adapt to the hybrid course offerings at [REDACTED], BIOEXXX Introduction to Soft Robotics was offered fully online as well as in an in-person, hybrid version. Instructors also observed that online students found innovative ways to complete the project builds asynchronously. Figure 4 shows how students used fabric from home for textile elements or were resourceful in finding heating elements. For example, students observed that hair straightening tools worked well for welding heat sealable fabric due to a heating element on two sides, in contrast to a traditional iron that only heats on one side. After this discovery, the instructor purchased hair straightening tools for the lab. We also developed a fully online version of the course for an online Master of Engineering (MEng) program in this Bioengineering Department. Students are mailed build kits, enabling them to develop new skills from anywhere in the world.
Given that many academics in the field of soft robotics are from disciplines outside biomedical and bioengineering, we were interested to know how offering this course in a bioengineering department may impact the student experience. In each Build Report (Fig. 3), students are prompted to analyze the project and suggest improvements (See Supplemental Materials for report instruction template). From performing a thematic analysis of student responses from the textile sensor (B2), tendon finger (B4), and motorization (B5) projects, we observed that 34% of students cited issues related to electronics or programming. In these reports, there were very few instances of suggested improvement, but high incidence of reported roadblocks or desire for more thorough instructions. Alternatively, 26% of reports cited challenges with the elastomer materials or 3D printed molds. In almost every report, students suggested a challenge and proposed a solution or improvement, illustrating the comfort of these bioengineering students with materials prototyping compared to electronics. One group stated, “If you have experience using circuits this was very easy, but for students with no circuits experience it was intimidating.” Depending on when this course is taken, students may be concurrently enrolled in a required bioinstrumentation course or may have not yet taken it. As many senior capstone projects include development of materials, instrumentation, or programming, these results emphasize for us the importance of providing opportunities, like this or similar courses, for bioengineering students to further develop these skills prior to senior capstone design. Some undergraduates take this course before (or concurrently with) the department’s capstone senior design course. Instructors saw preliminary evidence of students using prototyping techniques from this course in those projects including silicone molding, CAD design, 3D printing, and textile design. These techniques are not present in other required courses in the department’s curriculum; however, a more thorough analysis would be necessary to understand how readily students are transferring skills from this course to capstone design.
Lastly, to understand the interests of bioengineering students within this design course, we performed a thematic analysis of student responses to a prompt in Build Reports, asking them to propose an application for each build. This was open ended, and their designs were not constrained to bioengineering-related topics. Results showed that students proposed idea for medical devices (49%), everyday wearables (15%), general activities to expand upon the build projects such as new materials or increased number of actuators (15%), household items (12%), sports-related products (5%), and non-medical picking applications (4%). We see these results as confirmation that soft robotics is a discipline that bioengineering students find not only relevant to their major but also generally useful in other areas of life. Many examples of everyday wearables and household items proposed were specific to the student and challenges they face. Thus, soft robotics and other design-based courses may enhance personal agency [19] and improve confidence in engineering students.
Course Instructor Reflections
Course instructors echo the feedback from BIOE4XX/5XX students that appreciated the opportunity to work on open-ended and hands-on projects. The course instructors observed firsthand the enthusiasm students brought to the class and their comments throughout about its innovative nature compared to other lecture-based courses. Additionally, the course instructors are involved with the same department’s capstone design course and confirm the connections to capstone prototyping methods and the potential for capstone preparation this course provides. However, it should be noted that there are some challenges with the delivery of this type of course.
While teaching this course in a lecture slot provides benefits to the department and students including ease of scheduling, it creates some practical challenges for course staff. In its first offering, this course was taught in a lecture room with individual desks for students. Bringing in prototyping supplies and expecting students, some with limited prototyping experience, to work comfortably and efficiently in this space presented challenges. For example, ironing on a very small desk is difficult (Fig. 4: textile pneumatic actuators build). Storing curing silicone in molds was not possible; this limited the silicone that could be used to ‘fast cure’ formulations only (Fig. 4: silicone pneumatic and tendon actuators). In the second offering of the course, an active learning classroom with tables and a design lab with moveable tables and temporary storage options were reserved. Maker spaces are becoming more common and available in engineering colleges, making this type of reservation possible. Despite the inconvenience, it would be possible to conduct these experiments in traditional lecture halls.
Lecture courses typically enroll more students than lab classes, which usually have small sections for individualized attention and assistance. In this case, teaching assistants are critical to the successful completion of hands-on activities, given that lecture enrollment numbers may be higher than in lab courses. To control for student-to-instructor ratios, some hands-on projects spanned two weeks. In week 1, half of the class utilized the classroom (or design lab) to complete their activity, and half worked on a group assignment outside of class time (or in the lecture hall). In week 2, the groups rotated spaces. This reduces the student-to-instructor ratio while creating structured time for team-based project work. Additionally, some hands-on projects that did not contain expensive, overly complex, or messy supplies or techniques were given as kits to be completed outside of class at home or in the maker space (see Fig. 5 for examples). While many projects related to bioengineering may contain chemicals that make at-home assignments difficult, CAD design, 3D printing, or many of the home-safe labs developed during COVID-19 [43] can be adapted for these ‘homework’ builds. Piloting the builds for at-home use gave us the confidence to adapt this course for a fully remote version in our online MEng program.

Examples of student work showing resourceful uses of common household equipment in build projects
Conclusion
The field of soft robotics provides an accessible and relevant platform to teach bioengineering students design principles and practice. The prototyping skills gained are relevant to capstone projects in our department as well as to independent research and projects. While this course centers on soft robotics topics, a similar structure can be adopted to create project-based courses for a variety of student interests in bio- and biomedical engineering programs.
Data Availability
Course materials are provided in Supplemental Materials.
Code Availability
N/A.
References
Dutson AJ, Todd RH, Magleby SP, Sorensen CD. A review of literature on teaching engineering design through project-oriented capstone courses. J Eng Educ. 1997;86(1):17–28. https://doi.org/10.1002/j.2168-9830.1997.tb00260.x.
Howe S, Goldberg J. Engineering capstone design education: current practices, emerging trends, and successful strategies. In: Schaefer D, Coates G, Eckert C, editors. Design education today. Cham: Springer International Publishing; 2019. p. 115–48. https://doi.org/10.1007/978-3-030-17134-6_6.
Grimm MJ. Design as a feature of biomedical engineering education—satisfying ABET and preparing students to address clinical needs. J Biomech Eng. 2020;142(11): 110802. https://doi.org/10.1115/1.4047219.
Beyerlein S, Davis D, Huang YM, McKenzie L, Trevisan M. Capstone design courses and assessment: a national study. In: 2004 annual conference proceedings, Salt Lake City, Utah: ASEE conferences. 2004, p. 9.286.1–18. https://doi.org/10.18260/1-2--13900.
Meah K, Hake D, Wilkerson SD. A multidisciplinary capstone design project to satisfy ABET student outcomes. Educ Res Int. 2020;2020:1–17. https://doi.org/10.1155/2020/9563782.
Kim S, Laschi C, Trimmer B. Soft robotics: a bioinspired evolution in robotics. Trends Biotechnol. 2013;31(5):287–94. https://doi.org/10.1016/j.tibtech.2013.03.002.
Lim H, Kim HS, Qazi R, Kwon Y, Jeong J, Yeo W. Advanced soft materials, sensor integrations, and applications of wearable flexible hybrid electronics in healthcare, energy, and environment. Adv Mater. 2020;32(15):1901924. https://doi.org/10.1002/adma.201901924.
Cianchetti M, Laschi C, Menciassi A, Dario P. Biomedical applications of soft robotics. Nat Rev Mater. 2018;3(6):143–53. https://doi.org/10.1038/s41578-018-0022-y.
Majidi C. Soft robotics: a perspective—current trends and prospects for the future. Soft Robot. 2014;1(1):5–11. https://doi.org/10.1089/soro.2013.0001.
Arens P, et al. Real-time gait metric estimation for everyday gait training with wearable devices in people poststroke. Wearable Technol. 2021;2: e2. https://doi.org/10.1017/wtc.2020.11.
Payne CJ, et al. An implantable extracardiac soft robotic device for the failing heart: mechanical coupling and synchronization. Soft Robot. 2017;4(3):241–50. https://doi.org/10.1089/soro.2016.0076.
Radecka A, Bradshaw A, Cardenas J, Lamer S, Harrison I, Golecki H. Development of multidisciplinary, undergraduate-led research program in soft robotics. Presented at the 2021 ASEE virtual annual conference content access, July 2021.
Holland DP, et al. The soft robotics toolkit: strategies for overcoming obstacles to the wide dissemination of soft-robotic hardware. IEEE Robot Autom Mag. 2017;24(1):57–64. https://doi.org/10.1109/MRA.2016.2639067.
Shaffer CD, et al. A course-based research experience: how benefits change with increased investment in instructional time. LSE. 2014;13(1):111–30. https://doi.org/10.1187/cbe-13-08-0152.
Burack C, Melchior A, Hoover M. Do after-school robotics programs expand the pipeline into STEM majors in college? J Pre-Coll Eng Educ Res. 2019. https://doi.org/10.7771/2157-9288.1244.
Sullivan A, UmashiBers M. Girls, boys, and bots: gender differences in young children’s performance on robotics and programming tasks. JITE:IIP. 2016;15:145–65. https://doi.org/10.28945/3547.
Lin M-Y, Chen H, Golecki HM. HUG initiative: overcoming roadblocks on a research career roadmap of individuals from historically marginalized or underrepresented genders. Front Astron Space Sci. 2023;10:1134327. https://doi.org/10.3389/fspas.2023.1134327.
Cerinsek G, Hribar T, Glodez N, Dolinsek S. Which are my future career priorities and what influenced my choice of studying science, technology, engineering or mathematics? Some insights on educational choice—case of Slovenia. Int J Sci Educ. 2013;35(17):2999–3025. https://doi.org/10.1080/09500693.2012.681813.
Godwin A, Potvin G, Hazari Z, Lock R. Identity, critical agency, and engineering: an affective model for predicting engineering as a career choice: identity, critical agency, and engineering careers. J Eng Educ. 2016;105(2):312–40. https://doi.org/10.1002/jee.20118.
Berndt S, Herman M, Holland D, Walsh CJ. The SDM finger: teaching engineering design through a soft robotics workshop. Sci Scope. 2019;43(4):14–21.
Holland DP, Walsh CJ, Bennett GJ. A qualitative investigation of design knowledge reuse in project-based mechanical design courses. Eur J Eng Educ. 2019;44(1–2):137–52. https://doi.org/10.1080/03043797.2018.1463196.
Yu X, Nurzaman SG, Culha U, Iida F. Soft robotics education. Soft Robot. 2014;1(3):202–12. https://doi.org/10.1089/soro.2014.0009.
ES227: Medical Device Design Course. [Online]. Available: https://mdi.seas.harvard.edu/es227.
Rossi D, Nagy Z, Schlueter A. Soft robotics for architects: integrating soft robotics education in an architectural context. Soft Robot. 2014;1(2):147–53. https://doi.org/10.1089/soro.2014.0006.
Hanumara NC, et al. Classroom to clinic: merging education and research to efficiently prototype medical devices. IEEE J Transl Eng Health Med. 2013;1:4700107–4700107. https://doi.org/10.1109/JTEHM.2013.2271897.
Holland DP, Park EJ, Polygerinos P, Bennett GJ, Walsh CJ. The soft robotics toolkit: shared resources for research and design. Soft Robot. 2014;1(3):224–30. https://doi.org/10.1089/soro.2014.0010.
Miller I, Lamer S, Brougham-Cook A, Jensen KJ, Golecki HM. Development and implementation of a biometrics device design project in an introductory BME course to support student wellness. Biomed Eng Educ. 2022;2(1):75–82. https://doi.org/10.1007/s43683-021-00060-1.
Golecki HM, Bradley JA, Amos J. Designing capstone experiences for interdisciplinarity in biomedical engineering education. Presented at the American Society for Engineering Education, Baltimore, MD, Submitted 2023.
Deravi LF, Golecki HM, Parker KK. Protein-based textiles: bio-inspired and bio-derived materials for medical and non-medical applications. J Chem Biol Interfaces. 2013;1(1):25–34. https://doi.org/10.1166/jcbi.2013.1009.
Greer AH, et al. Design of a guided inquiry classroom activity to investigate effects of chemistry on physical properties of elastomers. J Chem Educ. 2021;98(3):915–23. https://doi.org/10.1021/acs.jchemed.0c00528.
Zoltowski CB, Oakes WC, Cardella ME. Students’ ways of experiencing human-centered design. J Eng Educ. 2012;101(1):28–59. https://doi.org/10.1002/j.2168-9830.2012.tb00040.x.
Cappello L, et al. Exploiting textile mechanical anisotropy for fabric-based pneumatic actuators. Soft Robot. 2018;5(5):662–74. https://doi.org/10.1089/soro.2017.0076.
Atalay A, et al. Batch fabrication of customizable silicone-textile composite capacitive strain sensors for human motion tracking. Adv Mater Technol. 2017;2(9):1700136. https://doi.org/10.1002/admt.201700136.
Greer AH, et al. Soluble polymer pneumatic networks and a single-pour system for improved accessibility and durability of soft robotic actuators. Soft Robot. 2020. https://doi.org/10.1089/soro.2019.0133.
Yilmaz S, Daly SR, Seifert CM, Gonzalez R. Evidence-based design heuristics for idea generation. Des Stud. 2016;46:95–124. https://doi.org/10.1016/j.destud.2016.05.001.
Garcia L, et al. The role of soft robotic micromachines in the future of medical devices and personalized medicine. Micromachines. 2022;13:28. https://doi.org/10.3390/mi13010028.
Sikligar D, et al. Design of a textile sensor embedded shirt for posture monitoring. In: Proceedings of the 2022 Design of Medical Devices Conference. 2022 Design of Medical Devices Conference. Minneapolis, MN, USA. ASME; 2022. https://doi.org/10.1115/DMD2022-1063.
Harris H, et al. Development and characterization of biostable hydrogel robotic actuators for implantable devices: tendon actuated gelatin. In: Proceedings of the 2022 Design of Medical Devices Conference. 2022 Design of Medical Devices Conference. Minneapolis, MN, USA. ASME; 2022. https://doi.org/10.1115/DMD2022-1049.
Braun V, Clarke V. Using thematic analysis in psychology. Qual Res Psychol. 2006;3(2):77–101. https://doi.org/10.1191/1478088706qp063oa.
Creswell JW. Research design: qualitative, quantitative, and mixed methods approaches. 3rd ed. Thousand Oaks, CA: Sage Publications; 2009.
Rohde J, et al. Design experiences, engineering identity, and belongingness in early career electrical and computer engineering students. IEEE Trans Educ. 2019;62(3):165–72. https://doi.org/10.1109/TE.2019.2913356.
Carberry AR, Lee H-S, Ohland MW. Measuring engineering design self-efficacy. J Eng Educ. 2010;99(1):71–9. https://doi.org/10.1002/j.2168-9830.2010.tb01043.x.
Jawad MN, Bhattacharjee A, Lehmann R, Busza A, Perez-Pinera P, Jensen K. Remote laboratory exercise to develop micropipetting skills. J Microbiol Biol Educ. 2021;22(1):ev22i1.2399. https://doi.org/10.1128/jmbe.v22i1.2399.
Acknowledgements
Special thanks to Alex Deptula, former teaching assistant in this course.
Funding
The work was funded in part by the Department of Bioengineering, University of Illinois Urbana-Champaign, the National Science Foundation ERFI REM Supplement (NSF #1830896), and National Science Foundation grant #2106286.
Author information
Authors and Affiliations
Contributions
HG designed and instructs the course discussed in this paper. HG and CW developed hands-on activities. JR collected data for the paper. HG, CC, and CW wrote and edited the paper.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflicts of interest.
Ethical Approval
This work is approved by the University of Illinois at Urbana-Champaign Institutional Review Board (NHSR Determination #21782).
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Golecki, H.M., Robinson, J., Cvetkovic, C. et al. Empowering Students in Medical Device Design: An Interdisciplinary Soft Robotics Course. Biomed Eng Education 4, 399–408 (2024). https://doi.org/10.1007/s43683-024-00143-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s43683-024-00143-9