
Abstract
For a vibrating system where the pendulum and vibrators are coupled together, the relevant dynamic model and the corresponding synchronization problem are rarely studied, due to its complex dynamic coupling relationships. In this paper, a vibrator–pendulum coupling system is proposed to study its synchronization principle; here, the pendulum is driven by the synchronous motion of the two vibrators directly. By exploiting the system motion differential equations and their vibration responses, the synchronization criterion of the two vibrators is deduced via the average method. After that, the stability criterion for the synchronous states is presented according to the convergence and divergence characteristics of the perturbed differential equation in the balanced state. Based on the theoretical results, the synchronous stable states and motion characteristics of the system under different parameter conditions are discussed by numerical qualitative analyses, and the reasonable parameters matching principles in designing the real vibrating machine are provided. A series of numerical simulations and experiments are further given to examine the validity of the theoretical methods and the obtained results. The dynamic model and research results presented in this paper can be applied to design a new kind of vibrating jaw crusher; in this case, the pendulum is served as the moving jaw and can work with its swing motion trajectory under the premise of the stable zero-phase difference between the two vibrators.













Similar content being viewed by others

Abbreviations
- \(m_{i}\) :
-
Mass of the vibrator \(i\) \((i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2)\), \(m_{1} = m_{2} = m_{0}\)
- \(m_{3}\) :
-
Mass of the pendulum
- \(m\) :
-
Mass of the rigid frame between the foundation and the pendulum
- \(M\) :
-
Mass of the total vibrating system
- \(k_{j}\) :
-
Spring stiffness of the vibrating system in \(j\)-direction \((j = x,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} y,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \psi )\)
- \(f_{j}\) :
-
Damping constant of the vibrating system in \(j\)-direction \((j = x,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} y,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \psi )\)
- \(k_{\theta }\) :
-
Stiffness of the torsional springs (or shaft) between the pendulum and the rigid frame
- \(f_{\theta }\) :
-
Damping constant for the swing motion of the pendulum
- \(r_{i}\) :
-
Eccentric radius of the vibrator \(i\) \((i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2)\), \(r_{1} = r_{2} = r\)
- \(J_{{\text{M}}}\) :
-
Moment of inertia of the total vibrating system
- \(J_{{\text{m}}}\) :
-
Moment of inertia of the rigid frame
- \(J_{i}\) :
-
Moment of inertia of the vibrator \(i\) \((i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2)\), \(J_{1} { = }J_{2} { = }J_{\varphi }\)
- \(j_{i}\) :
-
Moment of inertia about the axis of the motor \(i\) \((i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2)\); the value of \(j_{i}\) is relatively very small and can be neglected in engineering
- \(J_{{\text{t}}}\) :
-
Moment of inertia of the pendulum
- \(l_{i}\) :
-
Distance from the mounting point of the pendulum to the rotational center of the vibrator \(i\) \((i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2)\)
- \(l_{3}\) :
-
Distance from the mounting point of the pendulum to its mass center
- \(l_{{\text{e}}}\) :
-
Equivalent rotational radius of the pendulum
- \(f_{0i}\) :
-
Axis damping coefficient of the motor \(i\) \((i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2)\)
- \(T_{{{\text{e}}i}}\) :
-
Electromagnetic torque of the motor \(i\) \((i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2)\)
- \(T_{{{\text{e}}0i}}\) :
-
Electromagnetic torque of the motor \(i\) \((i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2)\) operating steadily with the rotational velocity \(\omega_{{{\text{m0}}}}\)
- \(\varphi_{i}\) :
-
Rotational phase of the vibrator \(i\) \((i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2)\) around its spin axis
- \(\varphi\), \(2\alpha\) :
-
Average phase of the two vibrators and their phase difference
- \(\omega_{{{\text{m0}}}}\) :
-
Average value of the rotational velocities of the two vibrators when the vibrating system operates in the steady state
- \(\lambda_{j}\) :
-
Vibration amplitude of the system in \(j\)-direction \((j = x,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} y,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \psi )\)
- \(T_{{{\text{Difference}}}}\) :
-
Difference of dimensionless residual torques of the two motors
- \(T_{{{\text{Capture}}}}\) :
-
Torque of the frequency capture
- \(H\), \(W_{{{\text{CC}}}}\) :
-
Coefficient for ensuring the stability of the system, \(H = W_{{{\text{CC}}}}\)
- \(r_{l1}\), \(r_{l}\) :
-
Dimensionless parameter, defined as \(r_{l1} = l_{1} /l_{3}\) and \(r_{l} = l_{2} /l_{1}\), respectively
- \(\eta\) :
-
Mass ratio between the pendulum and the rigid frame, \(\eta = m_{3} /m\)
- \(G_{1}\), \(G_{2}\) :
-
Auxiliary points in the dynamic model to help explain the measuring methods of \(\psi\) and \({\kern 1pt} \theta\) in experiments
- \(l_{{G1}}\), \(l_{{G2}}\) :
-
Auxiliary lines in the dynamic model to help explain the measuring methods of \(\psi\) and \({\kern 1pt} \theta\) in experiments
- \(\left( {\dot{ \bullet }} \right)\), \(\left( {\ddot{ \bullet }} \right)\) :
-
\({\text{d}} \bullet /{\text{d}}t\) And \({{{\text{d}}^{2} \bullet } \mathord{\left/ {\vphantom {{{\text{d}}^{2} \bullet } {{\text{d}}t}}} \right. \kern-\nulldelimiterspace} {{\text{d}}t}}^{2}\), respectively
References
Saeed NA, Awwad EM, El-Meligy MA, Nasr EA. Sensitivity analysis and vibration control of asymmetric nonlinear rotating shaft system utilizing 4-pole AMBs as an actuator. Eur J Mech A-Solids. 2021;86: 104145.
Liu CR, Yu KP. Design and experimental study of a quasi-zero-stiffness vibration isolator incorporating transverse groove springs. Arch Civ Mech Eng. 2020;20:67.
Blekhman II. Synchronization in science and technology. New York: ASME Press; 1988.
Blekhman II. Vibrational mechanics. Singapore: World Scientific; 2000.
Blekhman II, Fradkov AL, Nijmeijer H, Pogromskyb AY. On self-synchronization and controlled synchronization. Syst Control Lett. 1997;31:299–305.
Wen BC, Fan J, Zhao CY, Xiong WL. Vibratory synchronization and controlled synchronization in engineering. Beijing: Science Press; 2009.
Balthazar JM, Felix JLP, Brasil RM. Some comments on the numerical simulation of self-synchronization of four non-ideal exciters. Appl Math Comput. 2005;164:615–25.
Balthazar JM, Felix JLP, Brasil RM. Short comments on self-synchronization of two non-ideal sources supported by a flexible portal frame structure. J Vib Control. 2004;10:1739–48.
Fang P, Hou YJ. Synchronization characteristics of a rotor-pendula system in multiple coupling resonant systems. Proc Inst Mech Eng C J Mech Eng Sci. 2018;232:1802–22.
Du MJ, Hou YJ, Fang P, Zou M. Synchronization of two co-rotating rotors coupled with a tensile-spring in a non-resonant system. Arch Appl Mech. 2019;89:1793–808.
Chen XZ, Kong XX, Zhang XL, Li LX, Wen BC. On the synchronization of two eccentric rotors with common rotational axis: theory and experiment. Shock Vib. 2016;2016:6973597.
Zhang XL, Yue HL, Li ZM, Xu JL, Wen BC. Stability and coupling dynamic characteristics of a vibrating system with one internal degree of freedom and two vibrators. Mech Syst Signal Process. 2020;143: 106812.
Zhang XL, Li ZM, Li M, Wen BC. Stability and Sommerfeld effect of a vibrating system with two vibrators driven separately by induction motors. IEEE/ASME Trans Mechatronics. 2021;26:807–17.
Kong XX, Wen BC. Composite synchronization of a four eccentric rotors driven vibration system with a mass-spring rigid base. J Sound Vib. 2018;427:63–81.
Fiebig W, Wrobel J. Two stage vibration isolation of vibratory shake-out conveyor. Arch Civ Mech Eng. 2017;17:199–204.
Czubak P. Equalization of the transport velocity in a new two-way vibratory conveyer. Arch Civ Mech Eng. 2011;3:573–86.
Huygens C. The pendulum clock. Ames: Iowa State University Press; 1986.
Ramirez JP, Fey RHB, Aihara K, Nijmeijerb H. An improved model for the classical Huygens’ experiment on synchronization of pendulum clocks. J Sound Vib. 2014;333:7248–66.
Jovanovic V, Koshkin S. Synchronization of Huygens’ clocks and the Poincare method. J Sound Vib. 2012;331:2887–900.
Kumon M, Washizaki R, Sato J, Kohzawa R, Mizumoto I, Iwai Z. Controlled synchronization of two 1-DOF coupled oscillators. IFAC Proc Vol. 2002;35:109–14.
Fradkov AL, Andrievsky B. Synchronization and phase relations in the motion of two-pendulum system. Int J Nonlinear Mech. 2007;42:895–901.
Karmazyn A, Balcerzak M, Perlikowski P, Stefanski A. Chaotic synchronization in a pair of pendulums attached to driven structure. Int J Nonlinear Mech. 2018;105:261–7.
Czolczynski K, Perlikowski P, Stefanski A, Kapitaniak T. Why two clocks synchronize: energy balance of the synchronized clocks. Chaos. 2011;21: 023129.
Kapitaniak M, Czolczynski K, Perlikowski P, Stefanski A, Kapitaniak T. Synchronous states of slowly rotating pendula. Phys Rep. 2014;541:1–44.
Ni ZH. Vibration mechanics. Xi’an: Xi’an Jiaotong University Press; 1989 (in Chinese).
Zhao CY, Zhu HT, Wang RZ, Wen BC. Synchronization of two non-identical coupled exciters in a non-resonant vibrating system of linear motion. Part I: Theoretical analysis. Shock Vib. 2009;16:505–15.
Zhang YM. Mechanical vibration. Beijing: Tsinghua University Press; 2007. (in Chinese).
van Loan CF. Introduction to scientific computing: a matrix-vector approach using Matlab. Beijing: China Machine Press; 2005. (in Chinese).
Funding
This work was supported by the National Natural Science Foundations of China (Grant No. 52075085) and the Fundamental Research Funds for the Central Universities (Grant No. N2103019).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest regarding the publication of the paper.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
None.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Details for the deducing process of the motion differential equations in Eq. (1)
The coordinates of the two vibrators and the pendulum in the fixed frame \(oxy\) are denoted by \({\mathbf{X}}_{1}\), \({\mathbf{X}}_{2}\), and \({\mathbf{X}}_{3}\), respectively, and they are presented as
where \(l_{i}\) (\(i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} 2\)) is the mounting dimension of the vibrator \(i\); \(l_{3}\) is the distance from the mounting point of the pendulum to its mass center; \(r_{1}\) and \(r_{2}\) are the eccentric radii of the two vibrators, and \(r_{1} = r_{2} = r\).
In the moving frame \(o^{\prime}x^{\prime\prime}y^{\prime\prime}\), the final coordinates of the two vibrators and the pendulum, denoted by \({\mathbf{X^{\prime\prime}}}_{1}\), \({\mathbf{X^{\prime\prime}}}_{2}\), and \({\mathbf{X^{\prime\prime}}}_{3}\), are expressed as
with
where \({\mathbf{X}}_{{\mathbf{m}}}\) is the displacement vector of the rigid frame and \({\mathbf{L}}\) denotes the rotation matrix.
According to the above treatments of coordinate transformations, the kinetic energy of the system, denoted by \(T\), is deduced as
where \(J_{{\text{m}}}\) and \(J_{{\text{t}}}\) are the moments of inertia of the rigid frame and that of the pendulum, respectively, \(J_{{\text{t}}} = m_{3} l_{{\text{e}}}^{{2}}\); \(m_{3}\) and \(l_{{\text{e}}}\) denote the mass and the equivalent radius of the pendulum, respectively.
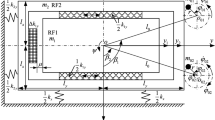
After the system is powered, the rigid frame generates displacements in x-, y-, and \(\psi\)-directions, leading to the deformations of the isolative springs. The deformations of the springs at the points A–D in Fig. 2 are denoted by \(\Delta {\mathbf{x}}_{{\text{A}}}\), \(\Delta {\mathbf{x}}_{{\text{B}}}\), \(\Delta {\mathbf{x}}_{{\text{C}}}\), and \(\Delta {\mathbf{x}}_{{\text{D}}}\), presented as
where \(l_{x1}\) and \(l_{x2}\) are the mounting dimensions of the isolative springs in the horizontal direction, and \(l_{y}\) denotes that in the vertical direction.
Based on Eq. (25), the potential energy (\(V\)) and the energy dissipation (\(D\)) of the system are deduced as
with
\({\mathbf{k}}_{{\text{A}}} = {\mathbf{k}}_{{\text{B}}} = {\mathbf{k}}_{{\text{C}}} = {\mathbf{k}}_{{\text{D}}} = {\text{diag}}\left( {\frac{{k_{x} }}{2},\frac{{k_{y} }}{2}} \right)\), \({\mathbf{f}}_{{\text{A}}} = {\mathbf{f}}_{{\text{B}}} = {\mathbf{f}}_{{\text{C}}} = {\mathbf{f}}_{{\text{D}}} = {\text{diag}}\left( {\frac{{f_{x} }}{2},\frac{{f_{y} }}{2}} \right),\) where \({\mathbf{k}}_{{\text{A}}}\), \({\mathbf{k}}_{{\text{B}}}\), \({\mathbf{k}}_{{\text{C}}}\), and \({\mathbf{k}}_{{\text{D}}}\) are the stiffness matrixes of the isolative springs at the points A–D, while \({\mathbf{f}}_{{\text{A}}}\), \({\mathbf{f}}_{{\text{B}}}\), \({\mathbf{f}}_{{\text{C}}}\), and \({\mathbf{f}}_{{\text{D}}}\) correspond to the damping matrixes; \(k_{\theta }\) and \(f_{\theta }\) are the stiffness of the torsion spring and the damping constant of the pendulum, respectively.
Based on Lagrange’s equation [12], the energy relationship of the system satisfies the fact of
where \({\mathbf{q}}_{i}\) and \({\mathbf{Q}}_{{\mathbf{i}}}\) are the matrixes of generalized coordinate and generalized force (or torque), respectively. In this paper, \({\mathbf{q}} = [x,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} y,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \psi ,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \theta ,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \varphi_{1} ,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \varphi_{2} ]^{{\text{T}}}\) is set as the generalized coordinates, \(Q_{x} = Q_{y} = Q_{\psi } = Q_{\theta } = 0\), \(Q_{\varphi 1} = T_{{{\text{e1}}}}\), and \(Q_{\varphi 2} = T_{{{\text{e2}}}}\).
Appendix B: Details for Eqs. (2)–(5)
Appendix C: Details for the derivation process of Eqs. (3)-(6)
The transfer function method [25] is briefly introduced for understanding the detailed derivation process of Eqs. (3)–(6).
First, the Laplace transforms of the motion differential equations with respect to \(x\), \(\psi\), and \(\theta\) are carried out. Therefore, the problem of differential equations is converted to that of algebraic equations. Assuming the Laplace transform of a function \(h(t)\) is denoted by \(L[h(t)] = h(z)\), then the Laplace transforms of \(\dot{h}(t)\) and \(\ddot{h}(t)\) are presented as
where \(z = \rho \omega_{{{\text{m0}}}}\) and \(\rho\) is the imaginary unit; \(h(0)\) and \(\dot{h}(0)\) are the initial displacement and initial velocity, respectively.
Since the response under the initial conditions corresponding to the free vibration is an attenuated vibration, we only consider the response in the steady state. Hence, Eq. (28) can be simplified as
Assuming \(P_{x} (z)\), \(P_{\psi } (z)\), and \(P_{\theta } (z)\) are the transfer functions in the right-hand side of the formulae with respect to \(x\), \(\psi\), and \(\theta\), and considering Eqs. (28) and (29), we yield
After the excitation on the right side of Eq. (1) is expressed in the complex form, the motion differential equations about \(x\), \(\psi\), and \(\theta\), are rewritten as
with \(\sigma = m_{1} l_{1} + m_{2} l_{2} + m_{3} l_{3}\), \(\tau = m_{1} l_{1}^{2} + m_{2} l_{2}^{2} + m_{3} l_{3}^{2}\), \(R_{{\text{A}}} = e^{{z\varphi_{1} }} + e^{{z\varphi_{2} }}\), \(R_{{\text{B}}} = l_{1} e^{{z\varphi_{1} }} + l_{2} e^{{z\varphi_{2} }}\).
Based on Eqs. (30) and (31), the responses of \(x\), \(\psi\), and \(\theta\) in the complex frequency domain are deduced as
with
From Eq. (32), the responses in the real frequency domain can be further deduced. Taking \(F_{xx} (z)R_{{\text{A}}}\) in the expression of \(X(z)\) for example, after considering \(z = \rho \omega_{{{\text{m0}}}}\) (\(\rho\) is the imaginary unit), we obtain
where the detailed expressions and definitions of the symbols in Eq. (33) can be found in Appendix B.
Based on the derivative process presented in Eqs. (28)–(33), the responses in Eqs. (3)–(5) and the relationships in Eq. (6) are deduced.
Appendix D: Details for Eq. (7)
Rights and permissions
About this article

Cite this article
Li, Z., Chen, W., Zhang, W. et al. Theoretical, numerical, and experimental study on the synchronization in a vibrator–pendulum coupling system. Archiv.Civ.Mech.Eng 22, 157 (2022). https://doi.org/10.1007/s43452-022-00480-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s43452-022-00480-y