
Abstract
This paper presents some novel methods to estimate a vessel’s number of shafts, course, speed and classify it using the underwater acoustic noise it generates. A classification framework as well as a set of reference parameters for comparison are put forth. Identifying marine traffic in surroundings is an important task for vessels in an open sea. Vessels in vicinity can be identified using their signatures. One of the typical signatures emitted by a vessel is its acoustic measurements. The raw sonar data consisting of the acoustic signatures is generally observed manually by sonar operators for suggesting class of query vessel. The valuable information that can be extracted from the recorded acoustic signature includes shaft revolutions per minute (SRPM), number of blades (NOB), number of shafts, course and speed etc. Expert sonar operators use their empirical knowledge to estimate a vessel’s SRPM and NOB. Based on this information vessel classification is performed. Empirical knowledge comes with experience, and the manual process is prone to human error. To make the process systematic, calculation of the parameters of the received acoustic samples can be visually analyzed using Detection of Envelope Modulation on Noise (DEMON) spectra. Reported research mostly focuses on SRPM and NOB. Parameters such as number of shafts and vessel course and speed can effectively aid the vessel classification process. This paper makes three novel contributions in this area. Firstly, some novel DEMON spectra analysis techniques are proposed to estimate a water vessel’s number of shafts, speed, and relative course. Secondly, this paper presents a classification framework that uses the features extracted from DEMON spectra and compares them with a reference set. Thirdly, a novel set of reference parameters are provided that aid classification into categories of large merchant ship type 1, large merchant ship type 2, large merchant ship type 3, medium merchant ship, oiler, car carrier, cruise ship, fishing boat and fishing trawler. The proposed analysis and classification techniques were assessed through trials with 877 real acoustic signatures recorded under varying conditions of ship’s speed and sea state. The classification trials revealed a high accuracy of 94.7%.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
A highly desirable capability by a vessel in an open sea is the ability to achieve awareness about marine traffic in its surroundings and map ocean depth using its hydroacoustic instrumentation onboard. This information is vital for a wide range of tasks such as collision avoidance, Aid to Navigation (AToN) entries, avoiding illegal activities and seeking emergency assistance etc. Similarly, for border authorities acquiring situation awareness about the type of commercial vessels transiting within the Exclusive Economic Zone (EEZ) of a country, is also valuable. Vessels in vicinity can be identified using their signatures. One of the typical signatures emitted by a moving or stationary vessel is its acoustic measurements. These will be referred to as Acoustic Signature of a Water Vessel (ASWV) in this paper. Primary contributors for an ASWV are an active SONAR (Sound Navigation and Ranging equipment), propellers, onboard machinery like gas turbines, diesel generators, pumps, motors, and personnel activity noises, to name a few. An active sonar transmits sound waves in a known direction and calculates the time taken by echo to return. This provides range and bearing of other vessels and underwater objects, aiding the navigation process. A vessel’s ASWV can be intercepted by another vessel’s passive sonar. Unlike its active counterpart, a passive sonar does not transmit and only listens passively for the ASWV generated by other platforms. Using manual empirical analysis, an acoustic signal is identified as a valid acoustic signature of some vessel in vicinity. However, the complex part comes next. This is the classification stage which may be divided into coarse and fine classification stages. During the coarse classification stage, a vessel may be classified into broad categories of large merchant ship type-1, large merchant ship type-2, large merchant ship type-3, medium merchant ship, oiler, car carrier, cruise ship, fishing boat and fishing trawler. Since the awareness of the utility of a vessel’s acoustic signature for its possible classification, an empirical technique called Detection of Envelope Modulation on Noise (DEMON) is being used to undertake this coarse classification. Through auditory observation, two basic parameters of the vessel’s acoustic signature are extracted, namely Shaft Revolutions per Minute (SRPM) and Number of Blades of propeller (NOB). Sound empirical knowledge may also allow identifying the Number of Shafts (NOS). Using these parameters, the target vessel is classified into one of the nine categories mentioned above. Being able to accurately classify using this manual DEMON processing technique, requires quite a bit of training and field experience. Usually, very sound empirical knowledge is required to undertake this task. Yet still, the classification is prone to errors since it’s almost completely dependent upon human skill set. Various digital signal processing (DSP) algorithms [1] are used for solving engineering problems on a broad spectrum of applications ranging from energy and power systems to multimedia and optical communication etc. Some of the important research domains (that involve DSP) and have been recently focused by various authors and research groups broadly include forecasting, multi-criteria decision making, fuzzy modeling and optimization tools etc. Authors at [2] have used neural network based methods to forecast electricity load and prices relying on feature extraction and processing with DSP. The work [3] has solved an optimization problem involving load forecasting by developing a model using General Algebraic Modeling System (GAMS) software. Khodaei et. al., [4]. present their solution to a bi-objective problem to optimize electricity cost as well emission using a fuzzy decision-making method. Like [3], the authors at [4] have made use of the GAMS software to model and solve the problem. The work at [5] provides a nice overview of how DSP revolutionized the multimedia industry by digitizing video and audio and enabling digital communication of multimedia signals. Optical communication is another area where DSP greatly facilitated, the work at [6] provides a review of some DSP techniques used to improve the data rate and cost-effectiveness of short-range optical communication systems. Similarly, some previous works [7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22] have proposed to perform DEMON through digital processing of acoustic signals and present some graphical results which can aid to undertake classification. However, an evaluation of these DEMON processing methods revealed some research gaps. Firstly, the analysis is limited to finding the basic parameters of SRPM and NOB, and none of the previous works suggest any analysis technique to extract the parameters of NOS and vessel speed from the DEMON spectra. Secondly, a very limited discussion has been provided in the previous works on the analysis of DEMON spectra for the purpose of classification and extraction of useful navigational information like relative course of a vessel. Thirdly, there is no reference information available in previous works to classify an ASWV based upon the extracted parameters of SRPM, NOB, NOS, and speed. This paper makes the following novel contributions:
-
Some novel DEMON spectra analysis techniques are presented to find NOS, speed, and relative course of a target vessel.
-
A vessel classification framework is put forth that uses features extracted from DEMON spectra and compares them with a reference set of parameters.
-
A set of reference parameters are provided to classify a vessel into one of nine categories ranging from large ships like car carriers to smaller ones like a fishing boat.
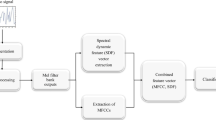
Relative course information can prove as a life-saving navigation aid to collision avoidance in the event of non-availability of other navigation equipment. The previous works only discussed methods to find SRPM and NOB of a vessel. This paper presents a novel reference table that can be used to classify a vessel into one of nine vessel categories based upon the values of SRPM, NOB, NOS and speed extracted from its DEMON spectrum. None of the previous works have provided such detailed reference information for classification of a vessel based upon parameters obtained from its DEMON spectrum. Course classification using the proposed method can significantly shorten the time taken by the complete classification process by narrowing down the relevant database for fine classification processing. A fine classification method like [23] identifies the particular vessel, e.g., MV Atlantic Vision or Fishing trawler Arctic Voyager. While the work [23] provided fairly accurate results, the processing times and accuracy could be improved. Incorporating an automated coarse classification step could improve the overall processing times and classifier accuracy. A coarse classification method could divide the database into some broad categories. Hence, a new query vessel could be classified into one of the broad categories first, and then fine classified using a method like [23] or those employing deep learning tools [24,25,26,27]. In this way, a smaller number of parameter comparisons would be required during fine classification as the search volume would have been considerably reduced. This would improve the processing time of the complete classification process. An overview of the proposed analysis techniques and the classification process is shown in Fig. 1. The accuracy of the proposed analysis and classification techniques was assessed by comparison with results obtained from empirical analysis and vessels’ true characteristics. Trials were conducted with 877 samples recorded with different passive sonars and under varying conditions of ships’ speed, noise, and sea state. The ASWV samples were acquired from the resources provided by San Francisco National Park Association (Historic Naval Sound and Video) [28], website (Discovery of sounds in the sea, 2020) [29], University of Vigo (ShipsEar: an underwater vessel noise database) [30], National Oceanic and Atmospheric Administration (A collection of sounds from the sea) [31], and National Park Service (Sounds recorded in glacier bay) [32]. The trials remained quite promising.

Flow diagram–Proposed classification process
The rest of the paper is organized as follows. Section 2 discusses the related works and provides a comparison of this paper with the state of the art methods. Section 3 presents constituent components of a typical acoustic signature and their significance for vessel classification. Section 4 mentions the signal processing steps to generate DEMON spectra. Section 5 puts forth the proposed DEMON spectra analysis techniques for estimating SRPM, NOB, NOS, speed, and relative course of a ship. Section 6 introduces the proposed classification method using a novel reference criterion. Section 7 discusses the results. Finally, Sect. 8 concludes the paper followed by a mention of some future work in Sect. 9.
2 State of the Art Methods
While significant contributions have been made on this subject by published works at [7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22], though due focused discussions, an analysis mentioning ways to extract NOS, speed, relative course, and classification techniques through DEMON parameters reference have not been previously published and are a novel contribution of this paper. Also, this paper provides a broader work flow from raw queries to classification outputs. An important stage in DEMON processing is the isolation of cavitation noise removing unwanted frequency components with the help of bandpass filtering. The works at [8, 13, 14, 16, 21] proposed a reasoned selection of the bandpass filter range for isolating the cavitation noise, whereas authors at [7, 9,10,11,12, 15, 17, 18, 20, 22] suggested an arbitrary selection. The work [19] used an alternate method called Empirical mode decomposition in place of bandpass filtering. This paper proposes a more reasoned approach based upon analysis of Power Spectral Density (PSD) for bandpass filter range selection. Works at [14, 16, 21] have briefly discussed the viability of DEMON parameters (SRPM, NOB, NOS, and speed) for vessel classification. The work [19] used the raw DEMON spectra to train a neural network for classification. Authors at [20] used a convolutional neural network-based classifier for only identifying the fundamental frequency of the DEMON spectra. The fundamental frequency could be used to calculate the SRPM. A generalized set of reference DEMON parameters for classification could not be found in any of the reviewed literature. The reference set of DEMON parameters of Table 3 presented in this paper is considered a valuable addition to the research community in this area. Authors at [7, 13,14,15,16,17, 22] have used real acoustic samples, while others [8,9,10,11,12, 20] have used simulated ones. The work [18] used both actual and simulated acoustic samples.
One of the pioneer works that has discussed classification of ships based upon their acoustic signatures was provided by Lourens [7]. The author proposed that the cavitation modulated propeller component of the signature could be used to extract the parameters of SRPM and NOB. The algorithm involved bandpass filtering the simulated signals to possibly discard the frequencies contributed by ship’s machinery and focused only on those added by propeller cavitation. However, the details for estimating the cut-off range of the bandpass filter were not provided. Later the signal was analyzed using periodogram, spectrogram and DFT followed by visual analysis to estimate the parameters. Due to the then available signal processing tools, it seems difficult to easily deduce the DEMON parameters from the generated plots. Gearbox noise was briefly introduced in [7] as a possible feature for fine classification. Kummert [8] introduced a fuzzy algorithm for finding SRPM and NOB from DEMON processing. The work [8] mentioned the outline of a DEMON algorithm which incorporated the steps mentioned in [7] followed by additional signal processing steps of normalization and averaging. After finding the fundamental frequency, possible candidates for the last harmonic were allocated confidence scores based upon fuzzy logic. The harmonic with the highest confidence score was divided by the fundamental frequency to find the number of propeller blades in [8].
Nielsen [9] primarily discussed the possible utility of Cramer Rao lower bounds for cavitation signal power, modulation power, frequency, and phase from a mathematical and theoretical perspective. Amindavar and Moghaddam [10] proposed exploiting the cyclostationary property of acoustic signals for estimating SRPM and NOB with simulated test samples. Sichun and Desen [11] suggested analyzing the 3D/2D DEMON spectrum instead of 2D spectrum. The proposed algorithm extracted 3-D features i.e. time, frequency and normalized power which were further processed to eventually arrive at 2D data to generate DEMON spectrum. Badri and Amindavar [12] proposed to utilize Nevallina Pick interpolation algorithm for extraction of SRPM and NOB, suggesting that the proposed method performed better than the conventional DEMON processing techniques. Hanson, Antoni, Brown, and Emslie [13] nicely explained the basics of DEMON processing and suggested generating the cyclic modulation spectrum for extraction of parameters. Chung, Sutin, Sedunov, and Bruno [14] described a cross-correlation based method for estimating DEMON parameters and briefly mentioned the viability of DEMON spectra for classification of water vessels into 4 classes. Antoni and Hanson [15] explored the cyclostationarity of acoustic signals for extraction of SRPM and NOB. Pollara, Sutin, and Salloum [16] provided some analysis tips for extracting parameters from DEMON spectra. Kemper, Ponce, Telles, & del Carpio [17] suggested some additional pre-processing on the sonar signals including signal segmentation and wavelet packets decomposition etc. before generating DEMON spectra. The authors at [17] showed how the SRPM could be calculated once the fundamental frequency was identified using some actual as well as simulated samples. Chen, Ma, Wu, & Meng [18] proposed a method to estimate the range of a sonar contact through some signal processing on DEMON spectra. The range information could be used to aid navigation, however, it required extensive signal processing. On the other hand, this paper suggests a much simpler method for relative course estimation of other platforms through analysis of the DEMON spectra of just few consecutive samples of the same platform. Knowing the relative course of other platforms can greatly aid in collision avoidance. Liu, Lü, Yang, Jiang, Huang, & Du [19] suggested the use of empirical mode decomposition in place of bandpass filtering before demodulation to generate DEMON spectra. The authors [19] have reported that DEMON spectra thus generated could be classified using a neural network. For signals recorded in noisy conditions with poor Signal to Noise Ratio (SNR), Lu, Song, Hu, & Li [20] have argued that it might be difficult to detect the correct fundamental frequency. The authors at [20] proposed to denoise and filter the DEMON spectra before inputting them to a neural network that identified the fundamental frequency through classification. Stinco, Tesei, Dreo, & Micheli [21] reported the details of some experiments the authors conducted wherein an Acoustic Vector Sensor (AVS) was used to acquire noise samples. An AVS could capture sound pressure as well as particle velocity vector. Demodulation using DEMON technique enabled detection of multiple modulating frequencies. Also, use of a direction AVS provided Direction of Arrival (DOA) information as well. Liu, Yang, & Yang [22] generated DEMON and three other kinds of spectra of a passenger ship acoustic sample and provided some interesting analysis including detection of fundamental frequency and number of propeller blades.
A comparison of the proposed method for DEMON spectra generation and analysis with those reported by previous works is placed at Table 1. Table 1 lists the basis adopted by different works for bandpass filter range selection and whether any analysis techniques have been suggested to extract parameters of SRPM, NOB, NOS, and speed from DEMON spectra. Table 2 provides some further comparison of this paper with previous works in terms of ASWV classification and relative course estimation techniques.
3 Acoustic Signature of a Water Vessel
The hydrophones of most passive sonars sample acoustic noises at a sampling rate of 22,050 Hz. Therefore, sonars can capture an acoustic sample containing frequencies from DC to 11,025 Hz in accordance with [33, 34]. Tucholski [35] explains that most of the characteristic frequency components of a typical ASWV range only up to 4 or 5 kHz. The components of a typical ASWV are discussed below:
3.1 Propeller Cavitation Noise
Every ship almost necessarily has a single or multiple shafts with propeller(s) as part of its propulsion system. As the propeller blades rotate through water, regions of high and low pressure are created. This pressure gradient vaporizes water near the propeller blades’ edges and surface. The result is formation of small bubbles on the edges and surface of blades. These bubbles are unstable and start collapsing. The process repeats itself with new bubbles created and collapsing quickly. The collapsing creates acoustic noise. This noise may be considered as a high frequency carrier noise. The cavitation noise is quite broad band and usually ranges from 50 Hz to 3 kHz, but in some instances may even range from 10 Hz up to 10 kHz. Under some fixed sea conditions, the frequency contents of this broadband noise remain the same. As the propeller blades rotate, their depth varies. This causes changes in the amplitude of cavitation noise as heard by a passive sonar. The variation in amplitude is proportional to the rotational speed of the shaft. In this way, the shaft rotation amplitude modulates the cavitation noise. The result is an amplitude modulated broadband noise with the high frequency carrier and low frequency modulating components contributed by cavitating bubbles and shaft rotation, respectively. DEMON processing is used to extract the hidden periodicity in acoustic noise and use it to find identifying parameters of a water vessel. While previously DEMON processing could extract only SRPM and NOB, this paper puts forth methods to additionally extract NOS, speed, and relative course; the details obtained are then used to classify the acoustic sample.
3.2 Machinery Noise
The sources of machinery noise include all the mechanical, electrical, and electro-mechanical equipment installed onboard. The list may include gas turbines, diesel generators, gear boxes, hydraulic pumps, air conditioners, refrigerators, AC and DC motors, winches, etc., to name a few. The frequency content of machinery noise usually ranges from DC to 4–5 kHz. The noises generated can be broadly classified into harmonic and non-harmonic noises. Harmonic noise is generated by an equipment consisting of rotating parts like a diesel generator or a motor and its frequency spectrum consists of a fundamental frequency and few harmonics. Non-harmonic noise is generated by an equipment that usually does not consist of rotating parts like a transformer, switch box etc. The characteristic machinery noise of a platform is usually due to the harmonic noises. Most machinery generates a distinct harmonic noise that may be utilized for the vessel identification. For eg., the gearbox noise consists of some characteristic low frequency components that are detectable from far ranges due to the ability of low frequency sound waves to travel far distances with negligible attenuation.
After coarse classification through DEMON, a fine classification method called Low Frequency Analysis and Recording (LOFAR) may be used. LOFAR relies on harmonic machinery noise. Usually, an interactive display enables the sonar operator to make frequency range selection for analysis. During this analysis, harmonic noises are searched for. The observed data is manually compared with the acoustic database. Based upon the estimated range of vessels, LOFAR analysis may be divided into Long Range (LR) for DC to 1289 Hz and Medium Range (MR) for 200–9600 Hz signals. Some further discussion on LOFAR can be found at [36,37,38].
3.3 Flow Noise and Activity Noise
Flow noise is generated because of the contact between a vessel’s hull and water. Its amplitude and frequency contents depend upon the vessel’s hull structure and relative speed, sea state etc. Activity noises are contributed by activities onboard a vessel, for eg. fuel replenishment at sea, hydrographic survey activities, drilling and lifting etc. These noises vary from one vessel to another and affected by the type of platform under query.
4 DEMON Processing
DEMON refers to a signal processing method to detect hidden periodicity in an ASWV. Once a DEMON spectrum is generated, it is analyzed to extract useful parameters from an ASWV’s constituent component that has been contributed by the ship’s propeller cavitation noise. Section 3 provided some useful insight on the construction of propeller cavitation noise. In objective terms, DEMON processing extracts the modulating frequency of propeller that amplitude modulates the cavitation noise. The fundamental frequency and the harmonics are analyzed to find the parameters of SRPM, NOB, and NOS. A flow diagram containing the DEMON processing steps is shown in Fig. 2.

Proposed DEMON based coarse classification process flow
The process starts with acquisition of a digitally sampled acoustic signal from some passive sonar hydrophones. The sampling rate during acquisition defines the upper limit of the frequency range that the signal can possibly contain. It is important that the cavitation frequencies are properly captured to allow subsequent envelope detection. Usually, the hydrophones sample at a rate of 22,050 Hz allowing frequencies till 11 kHz to be captured. During literature review, the authors could not find any work that could provide a clear guideline on the most probable frequency or frequency range of cavitation noise, to advise on the sampling rate of the hydrophone audio capturing device. Resultantly, the authors analyzed the acquired dataset comprising some 877 ASWV samples mostly sampled at 22,050 Hz. The results revealed that envelope detection was possible on most signals sampled at 22,050 Hz. Therefore, 22,050 Hz which is the existing sampling rate standard for hydrophone signals is probably an appropriate choice.
An ASWV originally contains frequency components from machinery noise, flow noise and activity noise sources in addition to the propeller cavitation noise. Conventionally, a bandpass filter is used to remove the unwanted frequency components. With the help of empirical knowledge, the bandpass filter can be manually tuned to isolate the cavitation noise. Limited discussion has been found in the reviewed literature regarding appropriate cut-off ranges of this filter. Empirical knowledge comes with experience and does not have sufficient ground-truth information. This paper proposes to generate and analyze the PSD of an ASWV to gain insight into the signal components. Propeller cavitation noise usually has the highest density unless the vessel is stationary with a stationary propeller but running machinery. In that case, no method can extract the DEMON parameters because there is no cavitation noise. In other cases, the PSD pattern should be analyzed to see if it has some considerable high-density area. Figure 3 shows the PSDs of two actual ASWVs. In Fig. 3a, the high-density region ranges from tens of Hz to around 2 kHz. DEMON processing with a bandpass filter low and high cut-off frequencies set to 50 Hz and 2 kHz respectively revealed satisfactory results and the envelope was finely detected. On the other hand, PSDs that have a relatively flat pattern with no steep gradients either do not contain the cavitation noise at all (due to stationary propeller) or the cavitation noise is very broadband. Figure 3b shows the PSD of an ASWV with a relatively flat pattern. For such signals, setting a large pass range of the bandpass filter seems a viable option. Best DEMON processing results with the signal in Fig. 3b were achieved with bandpass filter cut-off frequencies set to 10 Hz and 4 kHz respectively. A digital bandpass FIR filter of order five has been used in the implementation. However, for sharper cut-off gradients, higher order filters are required which may make the algorithm time inefficient and are therefore not recommended. Another factor to consider is that harmonic machinery noises can also contribute to DEMON spectra leading to inaccurate analysis. For example, two frequencies f1 and f2 in the direct spectrum can generate a difference frequency f1–f2 in the DEMON spectrum after squaring. The authors observed this phenomenon with very few of the samples. However, this can be avoided by careful selection of the bandpass filter.

Power Spectral Density (PSD). The X and Y axes represent the frequencies and PSDs in units of Hz and dB re 1µPa respectively. a PSD of sample shows highest concentration in the range between DC and 2 kHz; b PSD of sample shows highest spectral concentration in the range between DC and 4 kHz
Envelope detection through squaring [39] is a popular technique which usually involves steps of squaring, scaling by a factor of 2, down sampling, applying a low pass filter and finally taking square root to obtain the envelope. Another method of envelope detection involves using the Hilbert transform [40], however, detection through squaring has been used in this paper due to its ease of implementation. Finally, FFT of the signal is taken to generate the DEMON spectrum.
5 Proposed Analysis Techniques for Estimating SRPM, NOB, NOS, and Relative Course from DEMON Spectra
Following are the proposed analysis techniques for estimating SRPM, NOB, NOS, and relative course from DEMON spectra:
5.1 Shaft Revolutions per Minute
While ignoring any DC component that might be present, the first highest peak in the DEMON spectrum is located. This peak represents the fundamental frequency of the propeller modulating signal. If this peak exists at fm Hz, the SRPM can be calculated through (1):
5.2 Number of Propeller Blades
The next step is to find the harmonic frequencies of the fundamental frequency fm. The harmonics are caused by the blades. The harmonic peaks are usually located equidistant from each other on the spectrum. Suppose 3 harmonic peaks are found, then the number of blades will be 4. Similarly, if 4 harmonic peaks are found, then the number of blades will be 5. One of the blades usually cavitates more than the others resulting in one harmonic peak relatively higher than the others. This is due to one blade usually facing more wear and tear than the others. Suppose after the fundamental frequency at fm Hz, the first harmonic appears at 2 fm Hz, the second harmonic at 3 fm Hz, no peak at 4 fm Hz but another harmonic is found at 5 fm Hz. In this case, the number of blades will be estimated as 5. For this scenario, empirical knowledge suggests that a blade corresponding to the third harmonic exists, but its corresponding peak is not found due to the blade cavitating relatively less. Some tolerance, for eg. ± 0.1–0.3 Hz should be allowed in the inter harmonic distance.
Another method is to use only the fundamental frequency fm and the last harmonic, say fh, to find the number of blades. In this case NOB can be found by (2). Usually, it is sufficient to analyze the modulating frequencies in the range from DC to 55 Hz. However, in most cases, the analysis completes up to 20 Hz:
5.3 Number of Shafts
To determine if the target vessel has a single or twin shafts, presence of twin peaks or peaks closely located to the fundamental and harmonic frequencies are observed. If all the peaks of interest i.e., fundamental and its harmonics are clear and alone, the target vessel can be confidently declared as having a single shaft. On the other hand, if all peaks of interest are accompanied by another peak located nearby, for eg. within a separation of ± 0.1 ~ 0.5 Hz, the vessel can be confidently declared as having twin shafts. Empirical knowledge suggests that declaring a vessel as twin shaft from the observation of at least two twin peaks is correct for majority of times. However, if a twin peak exits with only one of the peaks of interest, it is insufficient evidence to declare the vessel as having twin shafts. For example, consider the DEMON spectrum of a 4-blade single propeller vessel showing a fundamental frequency peak followed by 3 × harmonic peaks. In this case, a twin peak might be observed with the fundamental peak only, and the other 3 × harmonics will probably be standing alone.
5.4 Speed (in Knots)
Based upon the SRPM, NOB and NOS, it is possible in most cases to be able to classify the target vessel into one of the categories mentioned in Table 3. However, in other cases, some doubt may persist. To clarify this doubt, the estimated speed of the vessel is calculated assuming it to be falling in one of the possible categories based upon the values of SRPM, NOB and NOS. The estimated speed is then checked to be within the usual speed limits of the vessel type. A true answer offers further confidence in safely classifying the vessel. However, if the answer is false, another possible vessel type may be assumed. The process is repeated until a match with the reference values is reached.
5.5 Relative Course Information from DEMON Spectrum Analysis
This paper puts forth a method that can be used to find the relative course followed by a target vessel through analysis of DEMON spectra of few successive hydrophone samples. To conduct the analysis, two or more successive samples of a vessel are acquired, and their DEMON spectra are generated. Few of the more common scenarios are depicted in Fig. 4. If the amplitudes of fundamental frequency and its harmonics’ peaks, referred to as peaks of interest here remain fairly constant in tandem spectra while it is known that the vessel is underway from her speed, then the vessel is most probably following a parallel course with a speed close to that steered by the listening vessel. In the second scenario, there may be a rise in the amplitudes of peaks of interest noted from successive samples. This suggests that the target vessel is approaching or closing in. A small increase may suggest that the vessel is following a perpendicular course and approaching. Whereas a large increase suggests that the vessel is approaching through a reciprocal course. There can also be a third scenario in which the amplitudes of peaks of interest reduce either slowly or abruptly in successive samples. A slow reduction suggests that the vessel is following a course perpendicular to the listening vessel’s bows and is moving away. Whereas an abrupt reduction suggests that the vessel is moving away along the reciprocal course. While this discussion does not exhaustively cover all possible scenarios, it provides some general guidelines on how DEMON spectra of tandem hydrophone signals can be used to gauge the relative course followed by a target vessel.

Proposed relative course prediction techniques through analysis of tandem DEMON spectra
6 Proposed Classification Method
Water vessels can be broadly classified into nine categories listed in the first column of Table 3. It is pertinent to mention that the probable values of NOB and NOS for each vessel category could not be found in the usual research literature (books, journals, magazines, and conference articles). The authors thus had to consult a wide range of datasheets and performance characteristics of different vessels in conjunction with empirical knowledge to generate Table 3. Every vessel type has some usual speed limits; the mean and standard deviation values for speed can be found in columns 2 and 3. Turns per knot (TPK) indicates the number of shaft revolutions per minute required for a vessel to achieve a speed of 1 knot. Each vessel type has a different TPK constant, mentioned in column 4 of Table 3. Knowing the SRPM and TPK, the speed can be found by (3):
The mean and standard deviation values of SRPM for each vessel category are provided in columns 5 and 6 respectively. Columns 7 and 8 contain information about the usual number of shafts and blades for each of the nine vessel types, respectively. It is re-iterated that this information has been deduced based on empirical knowledge and a vast list of hard and soft literature acquired from a variety of resources.
The proposed classification method using reference Table 3 is illustrated graphically via the flow chart in Fig. 5. It starts with extracting parameters of SRPM, NOS and NOB from the respective DEMON spectrum. Referring to Table 3, this information may indicate the vessel falling in one or more categories. To gain further accuracy, assuming the vessel to belong to one of the categories predicted during last step, the estimated speed is calculated using SRPM and TPK. If the estimated speed falls within the prescribed limits for that category, accurate classification is done. On the contrary, if the calculated speed does not fall within the prescribed speed limits for a particular category as mentioned in Table 3, the process is repeated assuming the ASWV belonging to one of the other categories predicted initially from parameters of SRPM, NOS and NOB. The vessel type for which this speed check holds true is selected as the true category. This completes the proposed coarse classification process using DEMON spectra.

Proposed classification method using reference Table 3
7 Results and Discussion
7.1 Experiment Environment
MATLAB® release R2016a on a mid-spec PC (6th generation Intel Core i5 processor @2.3 GHz, 8 GB of DDR3 memory @1600 MHz, NVIDIA 960 M GPU with 4 GB of DDR5 memory, Windows 10 Home edition) has been used to generate the DEMON spectra.
7.2 Test Samples
To test the algorithm, 877 real acoustic signatures of some vessels have been acquired from the resources provided by San Francisco National Park Association (Historic Naval Sound and Video) [28], website (Discovery of sounds in the sea) [29], University of Vigo (ShipsEar: an underwater vessel noise database) [30], National Oceanic and Atmospheric Administration (A collection of sounds from the sea) [31], and National Park Service (Sounds recorded in glacier bay) [32]. The samples were generated in different conditions of sea state, ships’ speed and using different sonars. The samples are therefore assessed suitable to evaluate the robustness of the novel analysis techniques presented in this paper. Classification of samples was done using the proposed DEMON spectra analysis techniques as well as empirical analysis to provide a baseline reference.
7.3 Testing Criteria
Since sonar was invented and till today, empirical analysis through listening is relied upon for acoustic signature classification. The empirical knowledge is gained over decades through the analysis of hundreds or even thousands of acoustic signatures. Expert empirical analysis can allow accurate extraction of DEMON parameters, though the completely manual process is quite time inefficient and prone to human errors for naive sonar operators. First, some expert sonar operators undertook empirical analysis for parameter extraction and classification of the test samples. Second, DEMON spectra of the same samples were generated and analyzed using the proposed techniques for parameter extraction and classification. Third, results from the two methods were compared with each other as well as with the ground truth information to assess performance of the proposed method.
7.4 Test Results
The proposed analysis and classification method demonstrates promising results. 831 out of 877 samples were classified into the correct category (one out of nine possible categories), achieving an accuracy of 94.7%. A confusion matrix is placed at Table 4. Time required in generating a DEMON spectrum of 20 s long ASWV remained less than 100 ms. Detailed results of few samples, mentioned in Table 5, are discussed below:
7.4.1 Sample 1
The PSD of sample 1 shown in Fig. 3b reveals maximum spectral concentration in the range from DC to 4 kHz. Accordingly, the bandpass filter cut-off frequencies have been set to 10 Hz and 4 kHz. The DEMON spectrum of sample 1 in Fig. 6a reveals the fundamental frequency fm at 1.96 Hz. Therefore, SRPM = 117.6. The first harmonic appears unambiguously at 3.93 Hz which is exactly twice the fm. The second harmonic, though visible, has relatively smaller amplitude. The second harmonic appears exactly at 3 fm i.e. 5.89 Hz. The third harmonic is clearly visible at 4 fm i.e. 7.86 Hz with a large amplitude. No peaks are detected at 5 fm i.e. 9.82 Hz, 6 fm i.e. 11.79 Hz or at higher frequencies. Therefore, we may stop looking if we cannot find two consecutive harmonics. Resultantly, NOB = 4 fm / fm = 4. To determine NOS, we look for twin peaks. A small peak appears before fm at 1.28 Hz, however, no twin peak appears near the other two clearly visible harmonics, i.e. the first and third. The second harmonic may not be considered for NOS here since it is hardly visible itself. Since we could not find at least two twin peaks, therefore, NOS = 1. Consulting Table 3 for NOS = 1 and NOB = 4, Fishing trawler is a clear choice.

Samples 1 and 2. a Sample 1 – DEMON spectrum with x and y axes representing frequency in Hz and amplitude respectively; b Sample 2—PSD with x and y axes representing carrier frequencies (in Hz) and spectral density (in dB re 1µPa) respectively
Also, if we calculate the speed with a TPK of 18, it comes out to be 6.55 knots which is within the usual speed limit of Fishing trawler. In this way, classification of sample 1 is complete. Classification results using the proposed method and empirical analysis are mentioned in Table 5. The results closely match. The true category of the vessel is Fishing trawler.
7.4.2 Sample 2
The PSD of sample 2 in Fig. 6b shows that the range from DC to 2 kHz contains maximum spectral contents. With bandpass filter set to retain only the aforesaid frequency range, DEMON spectrum shown in Fig. 7 was generated. The spectrum shows very clear peaks. The fundamental frequency fm appears at 5.64 Hz. Therefore, SRPM = 338.7. After fm,, five clear equidistant peaks can be seen. The amplitudes of the five harmonics are quite large and clear. The five harmonics appear at 11.49 Hz, 17.14 Hz, 22.88 Hz, 28.53 Hz, and 34.37 Hz. The first peak near DC is rejected since it is due to noise and DC removal is carried out in most methods [7,8,9,10,11] of DEMON spectra generation. The first harmonic at 11.49 Hz is 0.196 Hz away from 2 fm (11.294 Hz). Since 0.1–0.3 Hz tolerance is usually allowed in the appearance of harmonics, it is an easy decision to consider this harmonic. The second, third, fourth and fifth harmonics appear near 3 fm, 4 fm, 5 fm, and 6 fm within allowable tolerances. Therefore, number of harmonics plus one gives us 6 which is the NOB. Also, the last harmonic appears at 34.37 Hz and 34.37/5.64 = 6.08 ~ 6. Now we check for any twin peaks. The fundamental and the first, fourth and fifth harmonics’ peaks stand clear and alone. The second and third harmonics have some smaller amplitude asymmetrical twin peaks, with one twin peak appearing before and the other one after the respective harmonics. Due to relatively negligible amplitudes of these twin peaks and absence of symmetry, they are rejected. Therefore, NOS = 1. Referring to Table 3, NOB = 6 and NOS = 1 refers to only one class i.e., Large merchant ship type-2. This type of propeller has been developed during recent years to provide more powerful propulsion for large cargo ships. Finding her speed with TPK of 17 reveals a speed of 338.7/17 = 19.9 knots. The calculated speed falls well within the usual speed limits of a Large merchant ship type-2 being upto 23 knots. When referring to Table 3, the candidate that is more likely to have the parameters found should be selected. However, in this example, there is no doubt. The same sample was also subjected to empirical analysis. Classification results through proposed method and empirical analysis are shown in Table 5.

Sample 2–DEMON spectrum with x and y axes representing frequency in Hz and amplitude respectively
7.4.3 Sample 3
Based upon the PSD of Sample 3 in Fig. 8a, the passband is set from 10 Hz to 10 kHz. The DEMON spectrum is shown in Fig. 8b. The fundamental frequency fm appears at 8.87 Hz giving an SRPM of 532.68. There are three visible harmonics at 17.76 Hz (2 fm), 26.73 Hz (3 fm), and 43.99 Hz (5 fm). The fourth harmonic expected near 35.5 Hz (4 fm) is absent, however, the fifth harmonic appears almost exactly at 5 fm. Empirical experience reveals that it is common to encounter absence of a harmonic. The absent harmonic is usually assumed present if the next harmonic appears at the correct location, which in this case is 5 fm. Therefore, NOB = 5. Looking for twin peaks, one can easily spot the twin peaks near the fundamental as well as the visible harmonics, though the twin peaks near first and fourth harmonics are more obvious than others. Referring to Table 3, for NOB = 6 and NOS = 2 there are two candidates i.e. Large merchant ship type-3 (LM-3) and Cruise ship (CS). With TPK = 27 for LM-3, speed comes out to be 19.7 knots which is within the usual limits of LM-3. On the other hand, with TPK = 15 for CS, the speed comes out to be 35.5 knots which is not within the usual limits for CS. Therefore, CS is rejected, and LM-3 is selected as the correct class of the vessel. Empirical analysis revealed similar results.

Sample 3. a PSD with x and y axes representing carrier frequencies (in Hz) and spectral density (in dB re 1µPa) respectively; b DEMON spectrum with x and y axes representing frequency in Hz and amplitude respectively
7.4.4 Sample 4
The PSD of sample 4 in Fig. 9a suggests selecting a passband up to 6 kHz. Therefore, the bandpass filter cut-off frequencies were set to 50 Hz and 6 kHz. The DEMON spectrum of sample 4 is shown in Fig. 9b. The fundamental frequency appears at 1.81 Hz giving an SRPM of 108.84. Three harmonics appear at 3.58 Hz, 5.40 Hz and 7.21 Hz. This gives us NOB = 4. An interesting observation is the appearance of twin peaks. A twin peak with the fundamental frequency appears at 1.262 Hz, twin peak with the first harmonic appears at 3.036 Hz, the one with the second harmonic appears at 4.968 Hz and none appears with the third harmonic. The amplitude of the twin peak with the fundamental frequency is relatively high than those with the first and second harmonics. However, the three twin peaks appear at same separation of around 0.5 Hz. Therefore, NOS = 2. Referring to Table 3, the favorite candidate is a medium merchant ship. With a TPK of 10, the speed comes out to be 10.9 knots which is within the usual speed limits of the vessel type. The vessel is a cargo ship that falls in the category of a medium merchant ship. Empirical analysis also classified the vessel as a medium merchant ship.

Sample 4. a PSD with x and y axes representing carrier frequencies (in Hz) and spectral density (in dB re 1µPa) respectively; b DEMON spectrum with x and y axes representing frequency in Hz and amplitude respectively
7.4.5 Sample 5
As per the PSD of sample 5 shown in Fig. 10a, the bandpass filter was set to retain frequencies from 50 Hz to 4 kHz. The DEMON spectrum in Fig. 10b reveals the fundamental frequency at 3.80 Hz and only one harmonic at 7.72 Hz. The SRPM = 228.42, while the NOB = 2. While a small twin peak appears near the fundamental frequency at 3.02 Hz, no twin peak appears near the harmonic. The small peak that appears at 6.83 Hz has almost the same amplitude as the noise floor. Therefore, NOS = 1. Referring to Table 3, the only candidate is a fishing boat. With a TPK of 25, the speed comes out to be 9.14 knots which is within the usual speed limits of a fishing boat. Empirical analysis also revealed similar results. The true category of the vessel is fishing boat.

Sample 5. a PSD with x and y axes representing carrier frequencies (in Hz) and spectral density (in dB re 1µPa) respectively, b DEMON spectrum with x and y axes representing frequency in Hz and amplitude respectively
8 Conclusion
Empirical knowledge based manual vessel classification using acoustic signatures is a widely used approach for identifying vessels in an open sea. The process being manual demands experience and is prone to human error. Detection of Envelope Modulation on Noise (DEMON) spectra is a systematic approach used to detect hidden periodicity in an Acoustic Signature of Water Vessel (ASWV). Very limited literature is available on the subject. Each of the article reviewed during this research covered only one or two aspects of the overall process. With this paper, an effort has been made to present the complete DEMON based classification process emphasizing on some novel contributions. Previous works could only suggest ways to approximate a ship’s shaft revolutions per minute and number of blades. This paper presents and experimentally validates some analysis techniques to estimate the number of shafts, speed, and relative course using DEMON spectra. Knowledge about a ship’s number of shafts and speed can hugely facilitate its classification. Relative course information is perhaps very desirable for navigation purposes. Moreover, reported research focused on the viability of DEMON spectra-based classification though effective vessel classification still remained an open area of research. To the best of our knowledge, this is the first time that a comprehensive classification criteria and method is put forth that solely relies on the parameters extracted from DEMON spectra. This paper presents a novel criterion to classify a vessel into one of the nine possible vessel categories. The selected categories can help distinguish between different types of large and medium merchant ships, purpose made ships like an oiler, car carrier, or a cruise ship, and small fishing boats and trawlers. An experimental accuracy of 94.7% validates the proposed classification procedure.
9 Future Work
Work is in progress on automating the complete DEMON based classification process starting from generating DEMON spectra, analysis for extracting parameters SRPM, NOB, NOS, speed, relative course, and classification using the proposed criterion and method. This automation is expected to remove human-in-the-loop (HIL). Incorporating an automated DEMON based classifier for coarse classification followed by fine classification using deep learning tools are expected to reveal promising results especially in terms of accuracy and time efficiency.
References
Tan L, Jiang J (2018) Digital signal processing: fundamentals and applications. Academic Press
Gao W, Darvishan A, Toghani M, Mohammadi M, Abedinia O, Ghadimi N (2019) Different states of multi-block based forecast engine for price and load prediction. Int J Electr Power Energy Syst 104:423–435
Saeedi M, Moradi M, Hosseini M, Emamifar A, Ghadimi N (2019) Robust optimization based optimal chiller loading under cooling demand uncertainty. Appl Therm Eng 148:1081–1091
Khodaei H, Hajiali M, Darvishan A, Sepehr M, Ghadimi N (2018) Fuzzy-based heat and power hub models for cost-emission operation of an industrial consumer using compromise programming. Appl Therm Eng 137:395–405
Parhi, K. K., & Nishitami, T. (Eds.). (2018). Digital Signal processing for multimedia systems. CRC press.
Zhong K, Zhou X, Huo J, Yu C, Lu C, Lau APT (2018) Digital signal processing for short-reach optical communications: a review of current technologies and future trends. J Lightwave Technol 36(2):377–400
Lourens JG (1988) Classification of ships using underwater radiated noise. In COMSIG Southern African Conference on Communications and Signal Processing. Proceedings. 24 June (pp. 130–134).doi:https://doi.org/10.1109/COMSIG.1988.49315
Kummert A (1993) Fuzzy technology implemented in sonar systems. IEEE J Ocean Eng 18(4):483–490. https://doi.org/10.1109/48.262298
Nielsen RO (1999) Cramer-Rao lower bounds for sonar broad-band modulation parameters. IEEE J Ocean Eng 24(3):285–290. https://doi.org/10.1109/48.775290
Amindavar H, & Moghaddam PP. (2000) Estimation of propeller shaft rate and vessel classification in multipath environment. In Proceedings of the 2000 IEEE Sensor Array and Multichannel Signal Processing Workshop. SAM 2000 (Cat. No.00EX410), 17 March (pp. 125–128). doi:https://doi.org/10.1109/SAM.2000.877982
Li S, & Desen Y, (2007) DEMON Feature extraction of acoustic vector signal based on 3/2-D spectrum. In 2nd IEEE Conference on Industrial Electronics and Applications, 23–25 May (pp. 2239–2243). doi:https://doi.org/10.1109/ICIEA.2007.4318809
Badri S, & Amindavar H, (2007) Estimation of propeller shaft rate in multipath environment using nevanlinna-pick interpolation. In 2007 9th International Symposium on Signal Processing and Its Applications, 12–15 Feb. (pp. 1–4). doi:https://doi.org/10.1109/ISSPA.2007.4555379
Hanson D, Antoni J, Brown G, Emslie R (2008) Cyclostationarity for passive underwater detection of propeller craft: a development of DEMON processing. Proc Acoust 2008:24–26
Chung KW, Sutin A, Sedunov A, Bruno M (2011) DEMON acoustic ship signature measurements in an urban harbor. Adv Acoust Vib. https://doi.org/10.1155/2011/952798
Antoni J, Hanson D (2012) Detection of surface ships from interception of cyclostationary signature with the cyclic modulation coherence. IEEE J Ocean Eng 37(3):478–493. https://doi.org/10.1109/JOE.2012.2195852
Pollara A, Sutin A, & Salloum H, (2016) Improvement of the detection of envelope modulation on noise (DEMON) and its application to small boats. In OCEANS 2016 MTS/IEEE Monterey. 19-23 Sept. 2016 (1–10). doi:https://doi.org/10.1109/OCEANS.2016.7761197
Kemper G, Ponce D, Telles J, del Carpio C (2019) An algorithm to obtain boat engine RPM from passive sonar signals based on DEMON processing and wavelets packets transform. J Electr Eng Technol 14(6):2505–2521
Chen Y, Ma S, Wu Y, & Meng Z (2017). Passive range localization of the acoustic moving source using the demon spectrum. In 2017 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC) (pp. 1–5). IEEE
Liu Z, Lü L, Yang C, Jiang Y, Huang L, & Du J (2018) DEMON Spectrum extraction method using empirical mode decomposition. In 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO) (pp. 1–5). IEEE
Lu J, Song S, Hu Z, & Li S (2020) Fundamental frequency detection of underwater acoustic target using DEMON spectrum and CNN network. In 2020 3rd International Conference on Unmanned Systems (ICUS) (pp. 778–784). IEEE
Stinco P, Tesei A, Dreo R, Micheli M (2021) Detection of envelope modulation and direction of arrival estimation of multiple noise sources with an acoustic vector sensor. J Acoust Soc Am 149(3):1596–1608
Liu YS, Yang W, & Yang XM (2019) Acoustic spectrum and signature analysis on underwater radiated noise of a passenger ship target based on the measured data. In Eleventh International Conference on Signal Processing Systems (Vol. 11384, p. 113840H). International Society for Optics and Photonics.
Hashmi, MAR, & Raza RH (2016) Landmark based audio fingerprinting for naval vessels. In 2016 International Conference on Frontiers of Information Technology (FIT). 19–21 Dec. (pp. 297–302). doi:https://doi.org/10.1109/FIT.2016.061
Khishe M, Safari A (2019) Classification of sonar targets using an MLP neural network trained by dragonfly algorithm. Wirel Pers Commun 108(4):2241–2260
Khishe M, Mohammadi H (2019) Passive sonar target classification using multi-layer perceptron trained by salp swarm algorithm. Ocean Eng 181:98–108
Zhu P, Isaacs J, Fu B, & Ferrari S (2017) Deep learning feature extraction for target recognition and classification in underwater sonar images. In 2017 IEEE 56th Annual Conference on Decision and Control (CDC) (pp. 2724–2731)
IEEE. Berg H, & Hjelmervik KT (2018) Classification of anti-submarine warfare sonar targets using a deep neural network. In OCEANS 2018 MTS/IEEE Charleston (pp. 1–5). IEEE
Historic naval sound and video (2013) San Francisco maritime national park association. https://maritime.org/sound/. Accessed 6 October 2021
Anthropogenic Sounds (2020) Discovery of sound in the sea. https://dosits.org/galleries/audio-gallery/#manmade. Accessed 6 October 2021
Santos-Domínguez D, Torres-Guijarro S, Cardenal-López A, Pena-Gimenez A (2016) ShipsEar: an underwater vessel noise database. Appl Acoust 113:64–69
A collection of sounds from the sea (2018). National oceanic and atmospheric administration. https://oceanexplorer.noaa.gov/explorations/sound01/background/seasounds/seasounds.html#big. Accessed 6 October 2021
Sounds recorded in glacier bay (2020) = National park service. https://www.nps.gov/glba/learn/nature/soundclips.htm. Accessed 6 October 2021
Nyquist H (1924) Certain factors affecting telegraph speed. J AIEE 43(12):1197–1198. https://doi.org/10.1109/JAIEE.1924.6534511
Shannon CE (1949) Communication in the presence of noise. Proc IRE 37(1):10–21
Tucholski E (2018) United States naval academy SP411 Underwater acoustic and SONAR. https://www.usna.edu/Users/physics/ejtuchol/documents/SP411/Lesson 12.ppt. Accessed 15 January 2020
Weber DM, & Kruger CC (1993) Detection of tonals in lofargrams using connectionist methods. In IEEE International Conference on Neural Networks, 28 March-1 April (pp. 1662–1666 vol. 3). doi:https://doi.org/10.1109/ICNN.1993.298806
Li X, & Zhu F (2000) Application of the zero-crossing rate, LOFAR spectrum and wavelet to the feature extraction of passive sonar signals. In Proceedings of the 3rd World Congress on Intelligent Control and Automation (Cat. No.00EX393), 26 June-2 July (Vol. 4, pp. 2461–2463). doi:https://doi.org/10.1109/WCICA.2000.862484
Terry JL, Crampton A, & Talbot CJ Passive sonar harmonic detection using feature extraction and clustering analysis. In Proceedings of OCEANS 2005 MTS/IEEE, 17–23 Sept. 2005 (pp. 2760–2766 Vol. 3). doi:https://doi.org/10.1109/OCEANS.2005.1640192
Slamnoiu G, Radu O, Rosca V, Pascu C, Damian R, Surdu G, et al. (2016) DEMON-type algorithms for determination of hydro-acoustic signatures of surface ships and of divers. In IOP Conference Series: Mater Sci Eng (Vol. 145, pp. 082013, No. 8): IOP Publishing
Hahn SL (1996) Hilbert transforms in signal processing (Vol. 2): Artech house boston
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hashmi, M.A.R., Raza, R.H. Novel DEMON Spectra Analysis Techniques and Empirical Knowledge Based Reference Criterion for Acoustic Signal Classification. J. Electr. Eng. Technol. 18, 561–578 (2023). https://doi.org/10.1007/s42835-022-01167-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42835-022-01167-3