
Abstract
The power system stability and reliability are stimulated by the faults on the transmission line. Many researchers have explored the performance of the transmission system under various kinds of faults. Specifically, the arrival of expeditious and effective data acquisition systems with high rate of sampling has set down the foundation for successful real-time monitoring. Using the LabVIEW and the data acquisition system’s of National Instruments (NI), virtual systems have been developed for obtaining optimal paradigmatic data with appropriate characterization and quality transmission. The primary objective of the work is to perceive and comprehend the transmission line faults with the aid of synchronized phasor measurements obtained from the phasor measurement unit (PMU) as well as protecting the system using auto-reclosing signal. The developed algorithms include phaselet coefficients for perception as well as comprehension. In order to increase the accuracy, particle swarm optimized extreme learning machine technique has also been used for comprehension. A protection scheme is employed using auto-reclosing to minimize the power loss and quick reconnection the power line in case of temporary fault. Developed algorithms have been validated on a practical laboratory transmission line using NI PMU. As the LabVIEW platform has been used for simulations, it is composed of visual displays such that the system operator can efficiently perform the planning and control decisions.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Synchronized phasor measurements of voltage phasors and current phasors pertaining to the power system which was stretched over a wide geographical area have significantly increased power system situational awareness (SA) [1, 2]. SA gives an estimate of the power system operator’s ability to perceive and take commensurate control actions. From the power system perspective, SA is defined as the perception of the power system by measuring various parameters, comprehending the data obtained from the components for improved SA, and prognosis of the situation of the system depending on the interpretation of the data captured [3, 4].
The digital revolution surrounding information and communication technology resulted in a fundamental change in understanding the dynamics of the power system, gradually progressing from the use of supervisory control and data acquisition (SCADA) to synchronized phasor measurements (SPM). SCADA’s data acquisition rate is approximately one to two seconds, while SPM’s reporting rate is 50 phasors per second using a full-cycle discrete Fourier transform (FCDFT). This high-speed reporting helps in adequate SA in power system.
1.1 Related work
Inadequate SA poses a risk to the functioning and well-being of the largely interconnected electric network. Therefore, high-speed fault clearance protective systems are essential to maintain the steadiness of the power system. In [1], Ghosh et al. have presented a power system SA by assessing the impact of reliability of PMU using the generalized stochastic Petri nets through event tree analysis. Ghosh et al. [2] presented a self-supervision test and periodic routine maintenance scheduling for maximizing SA. However, the authors have not focused on fault classification and detection. Gopakumar et al. presented a method based on the full cycle fast Fourier transformation (FCFFT) on the acquired voltage and current signals to compute phasors [3]. In [4], a method based on the equivalent current phase angle (ECPA) and equivalent voltage phase angle (EVPA) of current and voltage phasor obtained from PMU has been presented. Ray et.al. [5] presented a support vector machine (SVM)-based fault detection and classification using wavelet packet transformation. With the development of digital relays, the rapid fault clearing time was significantly reduced. Reference [6] proposed a peak detection algorithm using a time-domain approach to identify the peak voltage and current magnitude in post-fault condition by comparing it with some threshold value. In order to overcome the limitation of the time-domain approach, algorithms based on frequency-domain approach such as wavelet transform, short-time Fourier transform was proposed by researchers using both laboratory and mathematical models. The laboratory prototypes mimic the behavior of the physical system, whereas numerical models represent the physical system with a mathematical relationship. The supremacy of wavelet-based techniques over the other frequency domain methodologies is shown in [7]. The second and third harmonic components of the transient current signals were used for fault analysis [8].
Transmission lines deliver bulk electricity to consumers located at long distances from generating stations. Thus, they are the power system’s key components. As the transmission line spans, a distance of some hundred kilometers up to the load side from the generation end, the GPS time-tagged measurements from PMUs have been an essential tool for its SA assessment. Transmission line fault analysis using practical models has been conducted by several researchers. A 72-mile laboratory transmission line has been considered and distance relay has been realized in [9]. Nevertheless, it is limited to the identification of the fault. An extra high-voltage transmission line which is about 160 mile long has been considered to validate the distance relaying technique using Intel microprocessors. However, the authors have not taken into account the classification of faults [10]. In [11], an artificial neural network-based distance relay has been corroborated on a 200 km laboratory transmission line [11]. Quadrilateral distance relay using a microcontroller with a numerical filtering algorithm was proposed and substantiated on the laboratory transmission line. However, none of these works are based on PMU measurements, nor they use phaselet-based classification. These works are limited to the fault detection, classification and localization of faults and none of them have consigned the protection scheme after the occurrence of fault. A phaselet-based fault detection and prediction using Gaussian Naïve Bayes was presented in [12], but it has not addressed faults, when ground is involved and also the protection scheme is not addressed.
1.2 Unique contributions
The unique contribution of the proposed work can be summarized as follows.
-
i.
The advantages of numerical and physical models have been exploited by employing a real-time hybrid model
-
ii.
Faster fault perception and comprehension using phaselet coefficients and particle swarm optimized extreme learning machine (PSO-ELM).
-
iii.
It uses the frequency domain approach and, thus, is not affected by the fault impedance and fault inception angle.
-
iv.
PMUs give only positive sequence components of voltages and currents. The proposed algorithm derives the negative and zero components from three-phase voltages and currents to distinguish between the line faults and the ground faults.
-
v.
It proposes a auto-reclosing scheme to provide complete protection.
-
vi.
Real-time validation using virtual instrument using the LabVIEW.
The proposed methodology is based on NI LabVIEW virtual instrumentation able to deliver high-speed data acquisition. Combined with high-speed digital signal processors and phaselet computations, it offers adequate and quick SA of transmission line.
1.3 Organization of the paper
Section 2 presents the transmission line SA using phaselet coefficients, brief ideas of extreme learning technique and particle swarm optimization. Auto-reclosing scheme is proposed in Sect. 3. Section 4 deals with the experimental set up utilized for validating the proposed methodology. Section 5 presents the result and discussion and Sect. 6 summarizes the proposed work.
2 Transmission line situational awareness
Phasor measurement-based power system monitoring provides adequate SA for the power grid operator. The perception and comprehension of faults on transmission are discussed in the following sections. A simple two-bus system is shown in Fig. 1.

Two-bus system
2.1 Perception of transmission line fault
The perception of the fault in transmission line is attained by utilizing the current phasor measurements obtained from PMU at faster rates using phaselet transform. The phasor computation based on the traditional FCDFT reports 50 frames per second for a 50 Hz AC signal. The perception based on FCDFT takes a minimum of 20 ms (one cycle of 50 Hz AC signal). On the other hand, the algorithm delineated in this section, which is based on the frequency components of the phaselet transformation is much faster than the traditional methods using Eq. (1) as it uses one-fourth cycle for computation of phasor. The perception is carried out in the frequency domain. Therefore, this analysis is independent of fault impedance as well as the fault inception angle
and fourth harmonic (m = 4); Z is the total number of samples per cycle; y(n) is the input signal, n is nth sample of the input signal; PL represents the number of samples present in each phaselet. pi is phaselet index, i.e., pi = 0, 1, 2 and 3.
In the proposed method, the current samples of 50 Hz are streamed at 10 kHz. Hence, the number of samples per cycle Z is 200. Considering four number of phaselets per cycle, each phaselet contains 50 samples, i.e., PL = 50 [12]. For m = 0, the DC component is represented using Eq. 2(a).
Similarly, the fundamental, second, third and fourth harmonics are presented using Eqs. 2b, 2c, 2d, 2e.
Higher-order harmonics were ignored as their amplitudes are negligible [13]. The 400 kV, 200 km transmission line fault perception is achieved depending upon the frequency component. During the normal operation, there will be only a fundamental frequency present. The DC, second and all other harmonics are negligible.
where pi = 0,1,2, and 3. Figure 2 illustrates the perception of fault on the transmission line. It uses phaselet coefficients for DC, fundamental and higher harmonics. Fault perception is accomplished based on the presence of the fundamental, DC and higher harmonics according to the algorithm shown in Fig. 2. The three-phase currents are acquired from the transmission line experimental setup using the cRIO-based NI PMU with the help of the NI-9246 AC current module, maintaining per-unit values as that of the practical 400 kV transmission line. Then, the phaselet coefficients (\(\delta_{pi} (0)\),\(\delta_{pi} (1)\),\(\delta_{pi} (2)\),\(\delta_{pi} (3)\), \({\text{and }}\delta_{pi} (4)\)) at different frequencies (i.e., for m = 0, 1, 2, 3 and 4) are evaluated using Eq. 2a, 2b, 2c, 2d, 2e and are given in Tables 1, 2, 3, 4, 5 and 6. Then the coefficients of each phase are examined for different fault conditions.

Flowchart for transmission line fault perception
Tables 1, 2, 3, 4, 5, and 6 present the phaselet coefficients, at normal operation (no fault condition), LG fault, LL fault, LLG fault, LLL fault and LLLG fault conditions, respectively. Table 1 makes it evident that for normal operation, the amplitude of fundamental frequency has a larger value. The DC (m = 0), second harmonic (m = 2), third harmonic (m = 3) and fourth harmonic (m = 4) have a very negligible amplitude (ideally \(\approx 0\)) for normal operation. The maximum amplitude of the frequency components for the normal operation is 0.4910. During LG fault, the fundamental frequency amplitude is increased to around 10 times that of the normal condition along with the appearance of the DC and harmonic components. It can be understood from Table 2 that the fundamental frequency component is increased to 6.6004 for phase A, and the DC component, second harmonic, and third harmonic values are 0.3679, 0.2407 and 0.1099, respectively, which are very small under normal operation (no-fault) condition. Likewise, for LL fault given in Table 3, the amplitude of the fundamental frequency has been increased to 5.4594 and 5.0009 for phase B and phase C, respectively, with the increase in DC, second harmonic and third harmonic to 0.2750, 0.2087 and 0.0679 for phase B and 0.2750, 0.2087 and 0.0679 for phase C, respectively.
Hence by observing the phaselet coefficients (i.e., for DC, fundamental, second harmonic and third harmonic), the transmission line fault perception can be achieved. Figure 3a depicts the corresponding three-phase current waveform for normal operation, and Fig. 3b shows the three-phase waveform for LLG fault.

Three-phase current waveform of a Normal operation b LLG fault
2.2 Transmission line fault comprehension using phaselet coefficients
The normal condition of the transmission is designated as class CS1. The transmission line faults such LG, LL, LLG, LLL and LLLG faults are designated as CS2, CS3, CS4, CS5 and CS6, respectively. Figure 4 shows the flowchart for fault comprehension. Once the fault is perceived using Fig. 3, the phaselet coefficients are evaluated using Eqs. 2a, 2b, 2c, 2d, 2e. Based on which condition gets satisfied, the fault is comprehended by examining the magnitudes of the frequency components (DC, second harmonic, third harmonic and fourth harmonic) using Fig. 4. The three-phase currents are acquired from the transmission line using NI PMU. Then, the phaselet coefficients of currents for each phase are calculated individually. When there are no faults on the transmission line, there exists only fundamental frequency and the magnitude of DC, second and higher harmonics are 0 for all three phases. During the fault condition on the transmission line, the amplitude of other frequency (including fundamental frequency) components becomes greater than 0. If the amplitude of frequency components (DC, second, third and fourth harmonics) of only one phase (A or B or C) is greater than 0, so is the indication of LG fault. If the amplitudes of the frequency components of two phases become greater than 0, then it indicates that there exists either LL fault or LLG fault. Similarly, if the amplitudes of frequency components of all three phases become greater than 0, then it indicates the occurrence of either LLL fault or LLLG fault. The PMU provides positive sequence components only. To distinguish between line fault (LL fault or LLL fault) and faults involving ground (LLG fault or LLLG fault), the negative and zero sequence currents are evaluated using Eq. (3). The symmetrical components of currents (Ia0, Ia1, and Ia2) are calculated using Eqs. 3a, 3b, 3c. If Ia0 is greater than zero, then it indicates that there is an occurrence of the ground fault (LLG or LLLG). Otherwise, it indicates phase faults.

Flowchart for comprehension of fault
Here, Ia2, Ia0, and Ia1 represent the negative, zero, and positive sequence components. \(\delta_{Api} (1),\delta_{Bpi} (1){\text{ and }}\delta_{Cpi} (1)\) are the current phasors evaluated using phaselet transform at the fundamental frequency of the three phases A, B and C, respectively. \(\alpha\) and \(\alpha^{2}\) represent \(1\angle 120^\circ {\text{ and }}1\angle 240^\circ\) , respectively.
Figure 5 depicts the frequency spectrum of three-phase currents under normal operation, LG fault, LL fault, LLG fault, LLL fault and LLLG fault. Figure 5a shows that the fundamental frequency component alone exists under normal operation. Also, Fig. 5b shows that the fundamental frequency component of phase A is dominating with the amplitude of 5 at 50 Hz with the appearance of DC, second harmonic and third harmonics of amplitudes 0.3679, 0.2407 and 0.1099, respectively. For phase B and phase C, the fundamental component is observed as 0.5026 and 0.4314, respectively, and the DC, second harmonic, third harmonics are 0.0151, 0.0028 and 0.0036 for phase B and 0.0117, 0.0018 and 0.0057 for phase C which is very negligible. Figure 5b shows that the fault that has taken place on the transmission line is LG fault. Similarly, in Fig. 5c, the amplitude of fundamental frequency of phases B and C is 5.4594 and 5.0009 and that of phase A is 0.4749. The phaselet coefficients of phase B and phase C appear for DC, second harmonic, third harmonic and fourth harmonic. For phase A, these components are very negligible. Figure 5c concludes that it is under LL fault. Once a fault has been detected, a trip signal is sent to the circuit breaker. Thus, the proposed algorithm can comprehend all types of faults using phaselet coefficients in the frequency domain within very less time (as much as the time is taken for the quarter cycle of the input signal).

Frequency spectrum for different type of fault at a Normal operation b LG fault c LL Fault d LLG fault e LLL fault f LLLG fault
2.3 Fault comprehension based on particle swarm optimized extreme learning machine (ELM)
The ELM employed in this research consists of a three-layer feed-forward neural network with one hidden layer, as shown in Fig. 6 [14]. The network consists of n1, l1 and m1 numbers of neurons in the input layer, hidden layer and output layer, respectively. The learning rate of ELM is much faster compared to that of a conventional neural network.

Topology of extreme learning machine
The output function of the ELM is calculated by Eq. (4)
where \(\beta 1 = \left[ {\beta 1_{1} ,\beta 1_{2} ,\beta 1_{3} ,......\beta 1_{L} } \right]^{T}\) is the output weight vector connecting the hidden layer to output layer. \(h1_{i} \left( x \right)\) is the output of ith hidden layer and is represented using Eq. (5).
where G is the activation function of the hidden layer, \({\text{a1}}_{{\text{i}}} {\text{ and b1}}_{{\text{i}}}\) are the hidden layer parameters that represent the corresponding weight and the bias of the hidden layer.
In ELM, during the training phase, the features are mapped to the data using a mapping function that is given by Eq. (6).
where T denotes the target matrix and H denotes hidden layer matrix.
\(H = \left[ {\begin{array}{*{20}c} {G\left( {a1_{1} . \, x_{1} + b1_{1} } \right)} & \cdots & {G\left( {a1_{l1} .x_{1} + b1_{l1} } \right)} \\ \vdots & \ddots & \vdots \\ {G\left( {a1_{1} . \, x_{n1} + b1_{1} } \right)} & \cdots & {G\left( {a1_{l1} .x_{n1} + b1_{l1} } \right)} \\ \end{array} } \right]_{n1 \times l1}\), \(\beta 1 = \left[ {\begin{array}{*{20}c} {\beta 1_{1}^{T} } \\ \vdots \\ {\beta 1_{l}^{T} } \\ \end{array} } \right]_{l1 \times m1}\) and \(T = \left[ {\begin{array}{*{20}c} {t_{1}^{T} } \\ \vdots \\ {t_{m}^{T} } \\ \end{array} } \right]_{n \times m}\).
The output weights are determined using Eq. (7)
where \(H^{ - 1}\) is the Moore–Penrose inverse of matrix H [15].
Particle swarm optimization (PSO) is a meta-heuristic method based on the movement of particles in a swarm. It has been widely used for several applications [16]. Every particle in a swarm is defined by its position and velocity within the search space. The particle position defines the solution to the objective function, and their locations are modified with every iteration. For an objective function that has an n-dimensional solution and a swarm size of N, Pi provides the position of the ith particle, and Vi gives its velocity denoted by Eq. (8) and Eq. (9) as follows.
Qi is the best personal position for the ith particle and Qg is best global position for the swarm. The position of the ith particle and its velocity are updated with the kth iteration as shown below.
where c1 and c2 are constants, while r1 and r2 are randomly generated numbers within the range of [0,1]. The best personal Qi is updated using the following rule using Eq. (12).
where F is the fitness function.
The PSO is used to evaluate optimal parameters of ELM, namely the input weights and biases as shown in Fig. 7. The goal of using PSO for ELM is to decrease the error during the training process. The inbuilt training methods used for ELM are mostly based on gradient descent. PSO is different as it is a meta-heuristic-based approach and can be used effectively for global optimization. This improves the overall accuracy of the classification. The primary objective of the ELM parameter optimization is to reduce the number of misclassified patterns. The value of the solution fitness in the solution space is determined according to Eq. (13).

PSO-based extreme learning machine
Here, MCi is the total number of misclassified trends for ith solution. This fitness value requires to be minimized to boost the efficiency of the solution.
3 Proposed auto-reclosing scheme
Auto-reclosing is the sequence of opening and reclosing the circuit breaker followed by a resetting of a high volt alternating circuit [17]. Most of the overhead transmission line faults of around 80–90% are temporary in nature [18], and they stay for a very small duration of time. Hence, auto-reclosing is essential to automatically close the circuit breaker for such temporary faults. The reclosing of the circuit breaker in case of permanent faults can lead to potential damage in the power system. Hence, it is essential to determine whether the fault is temporary or permanent. In case of temporary fault, the auto-reclosing should send the signal to close the circuit breaker after certain duration of time. Around 79.5–80.6% of the faults that take place on the transmission line are single-phase-ground faults. Hence, the use of single-pole auto-reclosing techniques in transmission line faults can improve the system stability and consistency and allow the transmission line to transfer more than half of the nominal power. In traditional single-pole auto-reclosing scheme, there is no provision for identifying the nature of the fault and the dead time is static, which leads to initiation of reclosing before the fault has been cleared. This may re-initiate the fault. The proposed methodology is presented to distinguish the temporary fault and permanent fault. Once the temporary fault is cleared and the secondary arc is quenched, the reclosing signal is sent to circuit breaker [19]. The total harmonic distortion (THD) is used to identify the presence of the secondary arc [20]. During the secondary arc, THD increases abruptly. If the fault is temporary, the THD value comes to the normal range after quenching of the secondary arc.
The nature of the fault is identified by utilizing the zero sequence component of the three phase voltage [17][17]. Once the temporary fault is cleared, there exists only a positive sequence component and the magnitude of zero sequence and negative sequence components of the three-phase voltages become negligible. The existence of the zero sequence component means that the fault is permanent. The THD and zero sequence components are calculated using Eq. (14), (15), (16), (17), respectively.
Here, \(\hat{V}_{pl} (m)\) is the voltage phaselet of mth harmonic, n is nth sample of the input voltage, PL represents the number of samples present in each phaselet, pi is phaselet index, i.e., pi = 0, 1, 2 and 3.
Then, the magnitude of the mth harmonic can be calculated using Eq. (15)
Figure 8 presents a auto-reclosing scheme for identifying the temporary fault using THD and the permanent fault using zero sequence component of three-phase voltage [21]. As soon as the fault has occurred, three-phase voltages are acquired using the cRio and the NI voltage module. THD and zero sequence voltage are evaluated using Eq. (16) and Eq. (17), respectively. Then, the THD is value is repeatedly compared to the threshold value. If the THD lies within 10% for 100 ms, it indicates that the fault is temporary, otherwise it is a permanent fault [22].

Proposed flowchart for auto-reclosing
4 Experimental setup
For validating the proposed algorithm, a laboratory real-time transmission line has been considered and is shown in Fig. 9.

Laboratory set-up for fault analysis on transmission line
The 440 V, three-phase AC supply, having same per unit that of practical transmission line, was assumed to be a generator. An autotransformer is connected to provide variable voltage 110 V/(0-110 V). A four-pole contactor, which act as circuit breaker is provided after the autotransformer to isolate the transmission line when fault is detected. The 200 km transmission line is divided into four parts 50 km each. Each 50 km comprises of single π section. The line parameter of transmission line are taken from [12]. The measurements are taken at the beginning of the first section of transmission line.
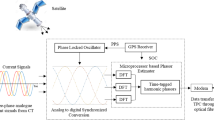
NI-based PMU comprises of cRIO-9066 controller, an analog input module NI-9246, NI-9401 digital input–output module and NI-9467 GPS synchronization module. The brief details of these modules are shown in [12]. PMU is interfaced with LabVIEW software installed in Dell's workstation. LabVIEW provides quick access to NI-based PMU and the graphical programming environment. Its interactive visualization interprets the result of the test simulation more effectively. It provides the online simulation for the real-time data for transmission line fault perception and comprehension as well as the projection for the future decision to protect the transmission line [23]. The algorithm is implemented using the LabVIEW and MATLAB parallely to process the online data from practical transmission line. LabVIEW is excellent for real-time signal acquiring and monitoring. MATLAB helps in implementing the evolutionary algorithm like ELM and PSO. The data were transferred between these two tools through the TCP/IP protocol.
5 Results and discussion
The results of the proposed work are discussed as follows.
5.1 Comprehension of faults
For the classification of the faults, different features are selected based on frequency components using phaselet transformation. The phaselet coefficients are evaluated using Eq. 2a, 2b, 2c, 2d, 2e. There are five features for each phase, namely DC component, fundamental frequency, second harmonic, third harmonics and fourth harmonics. Hence, for three-phase currents, the total number of features is fifteen. These features are extracted online from the real-time transmission line and classified using conventional ELM and PSO-tuned ELM. For the purpose of simulation, the particle dimension has been taken as 20 and the maximum number of iterations is taken as 100. A total of 1200 data samples have been taken for the classification of six classes, namely CS1, CS2, CS3, CS4, CS5 and CS6. 70% and 30% of the data are considered for testing and training, respectively. Table 7 shows the performance evaluation of training and testing of conventional ELM. Table 8 and Table 9 present the confusion matrix of the training and testing data using conventional ELM classifier. The overall accuracy are 98.75 and 98.41 for the training and testing data. Similarly, Table 10 shows the performance evaluation of training and testing data of PSO-based ELM. Table 11 and Table 12 presents the confusion matrix of PSO-tuned ELM classifier. The overall accuracy is found to be 99.50 and 99.08 for training and testing, respectively.
Table 13 shows the comparison between the fault comprehension using phaselet coefficient, ELM and PSO-based ELM. The same number of the test data has been considered for all the three classification methods. It has been observed that the PSO-based ELM outperforms the phaselet coefficient-based comprehension and ELM for comprehension.
5.2 Protection using auto-reclosing scheme
Figure 10 shows the LabVIEW block diagram (program) used in the proposed auto-reclosing scheme. The three-phase voltage is acquired using cRio-9066, and its harmonic components (upto fifth harmonics) are evaluated using the phaselet algorithm. These harmonics are used to evaluate THD continuously. When the THD is less than 10% and elapse time less than 100 ms, the auto-reclosing trigger signal is initiated and sent to the single-pole circuit breaker.

LabVIEW program for auto-recloser
The phaselet sub-VI and THD sub-VI are programmed using Eq. (14) and Eq. (16), respectively.
For validation purpose, the temporary fault are created in the experimental setup using fault creating block. Then, the fault voltage and THD are recorded. Figure 11a shows the arc voltage during the temporary fault of single line to ground fault. Before fault has occurred, the voltage is same as input voltage. At the instant of the fault occurrence, the higher-order harmonics appear due to secondary arc. The higher harmonic stay for very little time till the arc is quenched. The recloser trigger is sent to the circuit breaker only after the secondary arc is quenched. The secondary arc is perceived based on the THD value using Eq. (16). When the THD value is more than 10%, it implies that the presence of harmonics are more [20]. Figure 11b presents the THD variation before, during and after the fault. During the fault, the THD value risen suddenly to more than 50% and then it is reducing gradually after quenching the secondary arc. Figure 11c depicts the auto-reclosing trigger sent to the circuit breaker after quenching the secondary arc in the case of a temporary fault.

Single pole to ground fault a Arc voltage b Total harmonic distortion during pre-fault, fault, secondary arc and post-fault values c recloser trigger
6 Conclusion
This work proposes a situational awareness of the transmission line using a phaselet coefficient-based frequency-domain approach. Since the perception of fault is based on phaselet coefficients, the detection time is very less, i.e., one-fourth of the existing algorithms, leading to quick comprehension. Consequently, the situational awareness of the transmission line is greatly enhanced. Frequency-domain-based approach makes the proposed method insensitive to fault inception angle and fault impedance. The method proposed was incorporated in LabVIEW which is configured with visual interfaces that can help the power system operators SA. Furthermore, the fault comprehension has been achieved using the PSO-based extreme learning technique to comprehend the faults on the transmission line in real time. It also showed that the accuracy of comprehending the type of fault is better compared to comprehension using ELM alone. In addition to the pereception and comprehension of faults on the transmission line, auto-reclosing scheme has also been incorporated to protect the transmission line from temporary and permanent faults. Enhanced situational awareness enables the operators to take necessary control and protection decisions.
References
Ghosh S, Ghosh D, Mohanta DK (2017) Impact assessment of reliability of phasor measurement unit on situational awareness using generalized stochastic petri nets. Int J Electr Power Energy Syst 93:75–83
Ghosh S, Ghosh D, Mohanta DK (2017) Situational awareness enhancement of smart grids using intelligent maintenance scheduling of phasor measurement sensors. IEEE Sens J 17(23):7685–7693
Gopakumar P, Reddy MJB, Mohanta DK (2015) Adaptive fault identification and classification methodology for smart power grids using synchronous phasor angle measurements. IET Gener Transm Distrib 9(2):133–145
Gopakumar P, Mallikajuna B, Reddy MJB, Mohanta DK (2018) Remote monitoring system for real time detection and classification of transmission line faults in a power grid using PMU measurements. Prot Control Mod Power Syst 3(1):1–10
Ray P, Mishra DP (2016) Support vector machine based fault classification and location of a long transmission line. Int J Eng Sci Technol 19(3):1368–1380
Mann BJ, Morrison IF (1971) Digital calculation of impedance for transmission line protection. IEEE Trans Power Appar Syst PAS-90(1):270–279
Shaik AG, Pulipaka RRV (2015) A new wavelet based fault detection, classification and location in transmission lines. Int J Electr Power Energy Syst 64:35–40
Chanda D, Kishore NK, Sinha AK (2003) A wavelet multiresolution analysis for location of faults on transmission lines. Paper presented at IEEE TENCON 2003 conference on convergent technologies, Asia-Pacific Region, vol. 4, pp. 1464–1469
Gilany GS, Malik OP (1995) A laboratory investigation of a digital protection technique for parallel transmission lines. IEEE Trans Power Deliv 10(1):1689–1699
Jeyasurya B, Bhat CA, Rahman MA (1989) An accurate algorithm for transmission line fault location using digital relay measurements. Electr Mach Power Syst 16(1):25–34
Sanaye-Pasand M, Malik OP (1999) Implementation & laboratory test results of an elman network-based transmission line directional relay. IEEE Trans Power Deliv 14(3):782–788
Swain KB, Mahato SS, Cherukuri M (2019) Expeditious situational awareness-based transmission line fault classification and prediction using synchronized phasor measurements. IEEE Access 7:168187–168200
Gopakumar P, Reddy MJB, Mohanta DK (2015) Transmission line fault detection and localisation methodology using PMU measurements. IET Gener Transm Distrib 9(11):1033–1042
Tang J, Deng C, Huang G-B (2016) Extreme learning machine for multilayer perceptron. IEEE Trans Neural Netw Learn Syst 27(4):809–821
Huang G, Zhou H, Ding X, Zhang R (2012) Extreme learning machine for regression and multiclass classification. IEEE Trans Syst Man Cybern B (Cybernetics) 42(2):513–529
Kennedy, Eberhart R (1995) Particle swarm optimization. In: Proceedings of international conference on neural networks, vol 4. pp 1942–1948
Khan WA, Bi T, Jia K (2019) A review of single phase adaptive auto-reclosing schemes for EHV transmission lines. Prot Control Mod Power Syst 4(1):1–10
Elmore WA (2004) Protective relaying theory and applications, 2nd edn. Marcel Dekker, New York
Jannati M, Akbari AA (2020) Fast adaptive reclosing in double-circuit transmission lines for improving power. Turk J Electr Eng Comp Sci 28:1164–1178
Radojevic ZM, Shin J (2007) New digital algorithm for adaptive reclosing based on the calculation of the faulted phase voltage total harmonic distortion factor. IEEE Trans Power Deliv 22(1):37–41
Jamali S, Parham A (2010) New approach to adaptive single pole auto-reclosing of power transmission lines. IET Gener Transm Distrib 4(1):115–122
Sahoo B, Samantaray SR (2019) A fast adaptive auto-reclosing technique for series compensated transmission lines. IET Gener Transm Distrib 13(15):3272–3280
National Instrument (2008) Getting Started with LabVIEW Virtual Instruments
Acknowledgements
The authors would like to thank Science and Engineering Research Board (SERB), India for providing the research funding under the Early Career Research Award category to carry out the research work. [Grant No.—ECR/2017/000812]
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors do not have any conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Swain, K., Cherukuri, M. Intelligent fault analysis of transmission line using phasor measurement unit incorporating auto-reclosure protection scheme. SN Appl. Sci. 3, 531 (2021). https://doi.org/10.1007/s42452-021-04510-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-021-04510-x