
Abstract
Magnetorheological (MR) brakes are a type of electromagnetic brakes that make use of controllable viscoelastic properties of magnetorheological fluid for braking. The torque capacity of the MR brake depends on the magnitude of magnetic flux density generated in the MR fluid. In this study, the effect of combination of magnetic and non-magnetic materials for rotor disk of MR brake with the objective to maximizing the flux density in the MR fluid gap at the rotor periphery was investigated. Initially, the MR brake rotor disk radius and MR fluid gap thickness were determined by using Genetic Algorithm optimization technique for desired torque ratio and torque capacity. Magnetostatic analyses were performed at different current magnitudes to determine the magnetic field and flux density in the MR brake. Further, to enhance the magnetic field intensity in the MR fluid at the rotor periphery, the rotor was modeled with three different configurations of MR brake with combinations of magnetic and non-magnetic steel and magnetostatic analyses of the MR brake were performed. It was found that the leakage of flux away from rotor periphery was reduced and there is significant increase and concentration of the magnetic field and flux density in the MR fluid gap through the use of rotor disk with combined magnetic and non-magnetic materials which would subsequently increase the torque capacity of the MR brake.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
MR fluids are a suspension of magnetic particles of micron size in a base fluid with small amount of additives. They belong to the class of smart fluids which have the ability to change from a fluid-like behavior to that of a semisolid under the application of external magnetic field, and the changes are reversible which occurs in a fraction of a second. Hence, MR fluids find applications in vehicle and seat dampers, brakes, valves, clutches, engine mounts, seals and seismic vibration control and in robotics [1,2,3]. Magnetorheological brakes consist of MR fluid between rotor disk and stationary housing with electromagnetic coil embedded in the housing. When braking is to be applied, current is passed through the coils in the brake which sets up a magnetic field around it causing a change in the viscosity of the MR fluid, thus causing a braking action on the rotor surface. A lot of research work has been performed in the recent past on MR brakes as they have the potential to overcome the shortcomings of friction brakes. Different configurations of MR brakes such as single-disk brakes, multi-disk brakes, drum brakes, inverted drum brakes and T-shaped rotor brakes with various coil designs have been designed by many researchers. However, single-disk MR brakes are compact, lighter in weight and very easy to manufacture.
Finite element analysis and optimization of MR brake have been performed to design a MR brake which yields the highest braking torque. Nguyen and Choi [4] determined the optimized dimensions of several forms of brakes such as single-disk, drum, hybrid and T-shaped types by maximizing the braking torque with the torque ratio higher than desired value. Attia et al. [5] performed theoretical and experimental analysis of braking torque of a MR brake composed of Basonetic 5030 commercial MR fluid and concluded that with an increase in viscosity of MR fluid, rotor radius and applied current, the braking torque increases. Assadsangabi et al. [6] performed finite element analysis of a disk-type MR brake composed of MRF-132DG fluid to examine the magnetic field strength distribution and then optimized braking torque capacity using Genetic Algorithm to determine optimal parameters of brake. Shamieh and Sedaghati [7] determined the dimensions of the brake by formulating a multidisciplinary design optimization with the objective of maximizing the torque ratio of the MR brake with constraints of torque, mass, dimensions and magnetic field strength. Park et al. [8] performed magnetostatic, fluid flow and heat transfer simulations of single- and double-disk MR brakes using three different optimization techniques with the objectives of maximization of the braking torque and minimization of mass of the damper.
Several methods are available to increase the torque capacity of MR brake such as use of high-strength MR fluid, reduction in the fluid gap between stator and rotor, increasing the rotor radius or length, use of multiple disks, maximizing the magnetic field intensity without magnetic saturation of materials and use of multi-pole electromagnet [9]. However, less research work has been reported on the use of combination of magnetic and non-magnetic materials for rotor and casing of the MR brake. Poznic et al. [10] obtained larger overall brake torque compared to the conventional one with magnetic material by combining magnetic and non-magnetic materials for fabrication of single-disk MR brake. Topcu et al. [11] designed two different configurations of MR brakes with rotor and casing having combination of magnetic and non-magnetic materials with the objective of weight reduction and found that the ratio of torque to mass of the proposed designs were higher than brake with casing and rotor solely made of magnetic materials. Karakoc et al. [12] performed magnetic circuit and heat distribution analyses using finite element method for an automotive MR brake filled with MRF 132DG fluid and obtained optimal dimensions based on multidisciplinary design optimization with the objective of maximizing the torque. They used combination of magnetic and non-magnetic materials for housing to focus the magnetic field in the rotor periphery. In the present study, a single-disk MR brake was designed using Genetic Algorithm optimization technique for desired torque ratio and torque capacity using MATLAB software. The magnetic field strength and flux density in the MR fluid brake were determined using magnetostatic analysis in ANSYS workbench software. With the aim of concentrating the magnetic flux density in the MR fluid at the periphery of the rotor, the rotor was modeled with different combinations of magnetic and non-magnetic steel, and the magnetic field and flux density in the MR fluid gap were determined and compared with those of MR brake with rotor of single magnetic material.
2 Modeling torque of single-disk MR brake
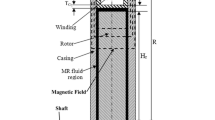
The schematic diagram of a single-disk MR brake is depicted in Fig. 1. MR brake is composed of rotor, stationary housing, MR fluid filled between rotor and housing and electromagnetic coils embedded in the stationary housing. When direct current is supplied to electromagnet coil, magnetic field produced increases the viscosity of the MR fluid and its yield stress increases. This causes resistance to the rotation of rotor disk leading to the generation of braking torque.

Schematic diagram of magnetorheological brake
The shear stress (τ) developed in the magnetorheological fluid under the application of magnetic field is often represented using the Bingham plastic model which gives fairly good results [13].
where \(\tau\)(H) is the yield stress at a particular magnetic field, μ is post-yield viscosity, \(\dot{\gamma }\) is shear rate and H is magnetic field strength.
The braking torque developed in a disk brake is obtained by Eq. (2), [11, 14]
where dA is the MR fluid area which is energized by external magnetic field, Ri and Ro are the rotor inner and outer radii, respectively, r is the radial distance from the rotor center and N is the number of rotor surfaces in contact with MR fluid.
Assuming that velocity distribution is linear through the MR fluid thickness and considering no-slip conditions, the shear rate could be approximated by Eq. (3),
where ω is the angular speed of the MR brake rotor disk and g is the MR fluid gap.Substituting Eq. (3) in (2) and integrating over the given limits, the overall braking torque can be divided into two components, namely magnetic field induced torque (TH) and viscous induced torque (Tµ), by Eqs. (4) and (5), respectively.
The ratio of the magnetic field induced torque to the viscous induced torque is known as the torque ratio (K) and is expressed by Eq. (6).
3 Optimal dimensions of MR brake rotor radius and MR fluid gap
Genetic Algorithms (GA) are the heuristic search and optimization techniques which imitate the biological processes of reproduction and natural selection for finding global solutions. In this optimization method, a population of randomly generated candidate individuals is generated in each iteration containing possible solutions to the given problem. The population in every iteration is termed as generation. The fitness value of each individual in the population is evaluated in every generation which is defined by the objective function of optimization. The best solutions are selected to form new generation by employing selection, crossover and mutation. This process is repeated until best solution is obtained which satisfies the objective function [15].
The dimensions of the MR brake were determined by using Genetic Algorithm optimization technique. Lord Corporation’s MR fluid, MRF 132DG, was chosen for the design of MR brake. The viscosity of this fluid is 0.112 Pa s measured at 40 °C. The yield stress variation (τyp in kPa) with the applied magnetic field strength (H in kA/m) for this fluid is obtained by curve fitting the experimentally determined shear stress versus shear rate curves at different magnetic field intensities and is expressed by Eq. (7) [16],
The yield stress of the MRF 132 DG fluid calculated using Eq. (7) is 20.06 kPa corresponding to magnetic field strength of 36 kA/m. The design variables are radius of rotor disk and thickness of MR fluid gap. The objective function is to obtain torque of 45 Nm at rotor speed of 1000 rpm with torque ratio equal to 20. This problem was solved using Genetic Algorithm optimization method in MATLAB software. The limits of the design parameters and the optimized values of the rotor disk radius and MR fluid gap thickness are given in Table 1. Lower limit of rotor disk has been taken as a smaller diameter rotor disk cannot produce sufficient torque. Higher limit of rotor disk is based on the size, mass and cost constraints.
4 Magnetostatic analysis of MR brake
The MR brake magnetic circuit involves modeling of stationary housing, rotor disk mounted on non-magnetic shaft, MR fluid, copper coil and surrounding air. Magnetostatic analysis of the MR brake was performed in ANSYS workbench software at 12 V and 2 A DC current to compute the magnetic field intensity and flux density in the MR brake and specifically in the fluid gap between rotor and casing. Axisymmetric model (one-fourth) of MR brake was created in the software as shown in Fig. 3a. Solid 117 is the element type chosen by the workbench software to perform the analyses. This element type can model three-dimensional magnetic fields and is defined by 20 nodes [17]. Analyses were performed with different mesh sizes to ensure that the results were independent of the mesh size and final model consisted of 1,20,346 elements and 1,72,277 nodes.
The materials for rotor and stator housing are specified as AISI 1020 low-carbon steel, and the gap between them is specified with properties of Lord MRF 132 DG fluid. The B–H curves of Lord MRF 132 DG fluid [18] and AISI 1020 steel [19] are depicted in Fig. 2a, b, respectively. The shaft of 10-mm diameter is made of SS 304 stainless steel to reduce the leakage of magnetic field. The bobbin on which coil is wound is made of aluminum material. The relative permeability of shaft and bobbin is unity. 21 AWG grade copper coil (∅ 0.723 mm) of 300 turns was considered for the analyses.

B–H curve of a MRF 132 DG fluid and b AISI 1020 steel
The magnetic field intensity distribution is computed by the software by means of Ampere’s and Gauss laws of Magnetics [20]. The magnetic field distribution in the MR brake is shown in Fig. 3b. The maximum field intensity in the MR fluid region at rotor periphery was found to be 128 kA/m. The magnetic flux density distribution in the MR brake and MR fluid gap are depicted in Fig. 4a, b, respectively. The maximum flux density in the stationary housing and in the MR fluid gap at the rotor periphery is 1.909 T and 0.6621 T, respectively.

a Axisymmetric model of MR brake and b magnetic field intensity in the MR brake at 2 A current

Magnetic flux density at 2 A current in the a MR brake and b MR fluid gap
5 Analyses of rotor composed of magnetic and non-magnetic materials
Electromagnetic circuit of the MR brake should be designed with the aim of concentrating the magnetic field strength in the MR fluid region at the rotor periphery which will lead to a higher moment arm and hence larger braking torque. In order to achieve this objective, the rotor was modified to consist of magnetic and non-magnetic materials. Three different configurations of rotor were considered consisting of one-fourth, half and three-fourth of lower portion of rotor made of non-magnetic steel and remaining portion made of magnetic 1020 steel, respectively. Magnetostatic analyses were performed for these three configurations. The axisymmetric model of the MR brake with lower half of the disk made of non-magnetic steel and upper half of the disk made of AISI 1020 steel, i.e., magnetic material is shown in Fig. 5a. From the analyses, it was found that the maximum magnetic field strength of 152 kA/m was obtained at 2 A current in the MR fluid at the rotor periphery as depicted in Fig. 5b. This is 18.7% higher that obtained for MR brake with rotor entirely made of single magnetic material.

a Axisymmetric model of modified MR brake and b magnetic field strength in the MR brake at 2 A current
From Fig. 6a, it can be observed that leakage of flux away from rotor periphery is significantly reduced and there is an increase in the flux density at the MR fluid gap near the rotor periphery as depicted in Fig. 6b which would enhance the torque of the MR brake. The maximum flux density in the MR fluid gap at the rotor periphery was found to be 0.7284 T which is 10% higher than that obtained for MR brake with rotor of single magnetic material. Thus, there is a significant increase and concentration of magnetic field strength and flux density at the rotor periphery with the use of combination of magnetic and non-magnetic materials for rotor.

Magnetic flux density at 2 A current in the a modified MR brake and b MR fluid gap
Similarly, magnetostatic analyses were performed at 2 A current for MR brake with one-fourth and three-fourth of lower portion of rotor disk made of non-magnetic steel, and the magnetic flux density distribution in the MR fluid gap is depicted in Fig. 7a, b, respectively. In the former case, the magnetic flux density is slightly higher, whereas in the latter case it is considerably higher compared to that obtained for rotor disk with lower half portion made of non-magnetic steel, respectively. In the latter case, though the flux density is higher, the shear area available for braking action which is subjected to MR effect is lesser. Based on the computation of torque for different configurations, MR brake with lower half of the disk made of non-magnetic steel and upper half of the disk made of AISI 1020 steel, i.e., magnetic material gave maximum torque, and hence, further analyses were carried out for the same configuration.

Magnetic flux density in the MR fluid gap for rotor with a one-fourth and b three-fourth portion made of non-magnetic material
Further, magnetostatic analyses were performed at voltage of 12 V and different current magnitudes of 0.5 A, 1.0 A and 1.5 A for MR brake with rotor of single magnetic material and combined magnetic and non-magnetic materials. The maximum values of computed magnetic field intensity and flux density in the MR fluid are plotted in Fig. 8a, b, respectively. It can be observed that at all values of current, the magnetic field intensity and flux density in the MR fluid are higher for rotor with combined materials than those for rotor with single material. Also, the percentage increase in their magnitudes increases with increase in current supplied. Hence, there is a substantial increase in the magnetic flux in the MR fluid region at the rotor periphery of MR brake with the use of combined magnetic and non-magnetic materials which enhances the torque capacity of the MR brake.

a Magnetic field strength and b magnetic flux density in MR fluid gap with current for rotor with single magnetic material and combined materials
6 Conclusions
In this study, the optimum MR brake rotor disk radius and MR fluid gap thickness were determined using Genetic Algorithm optimization technique in MATLAB software for desired torque and torque ratio of 45 Nm and 20, respectively. Magnetostatic analyses of the MR brake with rotor made of magnetic material were performed at different magnitudes of current in ANSYS workbench software to determine the magnetic field intensity and flux density distribution in the MR brake. Further, magnetostatic analysis of the MR brake was performed for three different rotor configurations composed of combined magnetic steel and non-magnetic steel materials with the objective of reducing the leakage of flux and focusing the field in the MR fluid region at rotor periphery. The magnetic field intensity and flux in the MR fluid gap for rotor with upper half of the disk made of magnetic steel increased by 18.7% and 10%, respectively, compared to those obtained for MR brake with rotor of single magnetic material at applied current of 2 A. Therefore, there is a significant increase in the magnitude and concentration of magnetic flux in the MR fluid region at the rotor periphery of the MR brake with combined magnetic and non-magnetic steel materials which enhances the braking torque.
References
Jolly MR, Carlson JD, Munoz BC (1996) A model of the behaviour of magnetorheological materials. Smart Mater Struct 5(5):607–614. https://doi.org/10.1088/0964-1726/5/5/009
Wang J, Meng G (2001) Magnetorheological fluid devices: principles, characteristics and applications in mechanical engineering. Proc Inst Mech Eng Part L: J Mater: Des Appl 215(3):165–174. https://doi.org/10.1243/1464420011545012
Muhammad A, Yao XL, Deng ZC (2006) Review of magnetorheological (MR) fluids and its applications in vibration control. J Mar Sci Appl 5(3):17–29. https://doi.org/10.1007/s11804-006-0010-2
Nguyen QH, Choi SB (2011) Selection of magnetorheological brake types via optimal design considering maximum torque and constrained volume. Smart Mater Struct 21(1):015012–015024. https://doi.org/10.1088/0964-1726/21/1/015012
Attia EM, Elsodany NM, El-Gamal HA, Elgohary MA (2017) Theoretical and experimental study of magneto-rheological fluid disc brake. Alex Eng J 56(2):189–200. https://doi.org/10.1016/j.aej.2016.11.017
Assadsangabi B, Daneshmand F, Vahdati N, Eghtesad M, Bazargan-Lari Y (2011) Optimization and design of disk-type MR brakes. Int J Autom Technol 12(6):921–932. https://doi.org/10.1007/s12239-011-0105-x
Shamieh H, Sedaghati R (2016) Design optimization of a magneto-rheological fluid brake for vehicle applications. In: ASME 2016 conference on smart mater adaptive structure intelligent systems. American Society of Mechanical Engineers. V002T03A008
Park EJ, da Luz LF, Suleman A (2008) Multidisciplinary design optimization of an automotive magnetorheological brake design. Comput Struct 86(3):207–216. https://doi.org/10.1016/j.compstruc.2007.01.035
Shiao Y, Nguyen QA (2013) Development of a multi-pole magnetorheological brake. Smart Mater Struct 22(6):065008–065021. https://doi.org/10.1088/0964-1726/22/6/065008
Poznic A, Miloradovic D, Juhas A (2017) A new magnetorheological brakes combined materials design approach. J Mech Sci Technol 31(3):1119–1125. https://doi.org/10.1007/s12206-017-0210-5
Topçu O, Tascioglu Y, Konukseven EI (2015) Design and analysis of a lightweight disc-type magnetorheological device. In: Proceedings of the world congress on engineering, vol II
Karakoc K, Park EJ, Suleman A (2008) Design considerations for an automotive magnetorheological brake. Mechatronics 18(8):434–447. https://doi.org/10.1016/j.mechatronics.2008.02.003
Kordonsky W (1993) Elements and devices based on magnetorheological effect. J Intell Mater Syst Struct 4(1):65–69. https://doi.org/10.1177/1045389X9300400108
Li WH, Du H (2003) Design and experimental evaluation of a magnetorheological brake. Int J Adv Manuf Technol 21(7):508–515. https://doi.org/10.1007/s001700300060
Kramer O (2017) Genetic algorithms. In: Kacprzyk Janusz (ed) Genetic algorithm essentials, 1st edn. Springer, Basel, pp 11–19
Gao F, Liu YN, Liao WH (2017) Optimal design of a magnetorheological damper used in smart prosthetic knees. Smart Mater Struct 26(3):035034–035043. https://doi.org/10.1088/1361-665X/aa5494
ANSYS Electromagnetic Field Analysis Guide. Available online http://www.ansys.stuba.sk/html/elem_55/chapter4/ES4-117.htm. Accessed on 15 Nov 2018
Lord technical data, available online. https://www.lordmrstore.com/_…/Data_Sheet_-_MRF-132DG_Magneto-Rheological_Fluid. Accessed on 15 Nov 2018
MagWeb. Database of soft magnetic materials. Available online https://magweb.us/free-bh-curves/. Accessed on 15 Nov 2018
Gurubasavaraju TM, Kumar H, Arun M (2017) Optimisation of monotube magnetorheological damper under shear mode. J Braz Soc Mech Sci Eng 39(6):2225–2240. https://doi.org/10.1007/s40430-017-0709-9
Acknowledgements
The authors wish to acknowledge IMPRINT Project No. IMPRINT/2016/7330 titled with ‘‘Development of Cost Effective Magnetorheological (MR) Fluid Damper in Two wheelers and Four Wheelers Automobile to Improve Ride Comfort and Stability’’ funded by Ministry of Human Resource Development and Ministry of Road Transfer and Highways, Govt. of India.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Acharya, S., Kumar, H. Investigation of magnetorheological brake with rotor of combined magnetic and non-magnetic materials. SN Appl. Sci. 1, 997 (2019). https://doi.org/10.1007/s42452-019-1029-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-019-1029-8