
Abstract
Purpose
In the current work, the motion of a three degrees-of-freedom (DOF) dynamical system as a vibrating model is examined. The proposed system is of high importance in vibration engineering applications, such as the analysis of the control of flexible arm robotics, flexible arm vibrational motion as a dynamic system, pump compressors, transportation devices, rotor dynamics, shipboard cranes, and human or walking analysis robotics.
Methods
Lagrange's equations (LE) are used to derive the equations of motion of the controlling system. The analytic solutions (AS) are obtained utilizing the multiple-scales method (MSM) up to the third order.
Results
The framework for removing secular terms provides the requirements for the solvability of this problem. Various resonance scenarios are categorized and the modulation equations (ME) are constructed. To graphically demonstrate the beneficial impacts of the distinct parameters of the problem, the time histories (TH) of the approximate solutions as well as the resonance curves (RC) are depicted. The Runge-Kutta algorithm (RKA) is employed to obtain the numerical solutions (NS) of the regulating system.
Conclusion
A comparison of the AS and NS reveals the accuracy of the perturbation approach. The stability/instability zones are studied using Routh-Hurwitz criteria (RHC), and then they are examined using a steady-state situation. Basically, the used perturbation method is considered a traditional method that is applied to solve a new dynamical system. Then, the achieved results are considered new because they weren’t obtained previously, which indicates the novelty of this work.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
The vast applicability of pendulum models in everyday life has attracted the interest of numerous specialists in recent decades, especially in the last 20 years of this century. However, the field of dynamics of numerous varieties of pendulums has been investigated using a variety of analytical and numerical techniques.
The planar movement of a 2DOF dynamical system of auto-parametric pendulum connected to a damper was examined [1], while the motion of a spring pendulum (SP) in light of two control parameters (the pendulum frequencies and spring’s ratio, and the energy) was investigated [2]. It was demonstrated that the dynamics of the SP is largely regular at the boundaries of very small and very high parameter values, while most initial conditions result in chaotic paths at intermediate parameter values. The behavior of a 2DOF nonlinear dynamical model depicted by the aforementioned motion in a viscous fluid flow was studied [3]. The chaotic motion of a weekly 2DOF vibrating pendulum with a fixed and shifting pivot was explored [4] and [5], exhibiting their chaotic procedure close to resonance in the perspective of the utilized parameters. Eissa et al. [6] studied the stability of a nonlinear SP motion using the MSM [7], which was improved during the time that the pendulum was exposed to an outer force [8].
Numerous papers have looked at different suspension point trajectories for elastic pendulums (EPs) with different DOF as previously shown [9,10,11,12,13]. According to [9], the hanging point of a damped EP passes in a circle is considered. The resulting outcomes were stated [10] for this point’s elliptic path, where AS are obtained in a few unique circumstances. In [11], such a problem was investigated when the suspension point moves in a path like Lissajous curve, while the main findings were presented [12] for the movement of a linked EP with a rigid mass. A concrete example of these outcomes for a given suspension point has been beforehand given [13]. The description of a large spring as a physical pendulum in [14] helps to improve the required mass estimation to get resonances, in which a formula for the mass, with regard to the spring constant and various spring lengths, was derived. A model of damped oscillations of a variable mass on a SP was described [15]. Linear and quadratic velocity-based damping components have been incorporated of this model. In [16], a material massless point in an elastic suspension without weight was taken into consideration for its nonlinear spatial oscillations. It is assumed that the frequency of the pendulum’s vertical oscillations is considered equal to twice the frequencies of its swinging. Numerically, the controller’s impacts besides a few parameters on an oscillating system were examined [17]. In addition, the RHC [18] have been applied to analyze the stability of steady-state outcomes and their various areas.
A basic piezoelectric spring design based on the structure of a typical binder clip was described [19]. The harvester with a SP permits the piezoelectric transducer to transform the dynamical energy of mass into an electrical one. A dynamical system that interacts with two devices, an electromagnetic and piezoelectric, to create two unique models was studied [20]. A nonlinear SP with 2DOF and nonlinear damping is connected to these devices. It has been explored how a position feedback controller affects the oscillation of a micro-electromechanical resonator. Using the MSM, the first-order approximation is achieved. Based on the frequency response equations in the vicinity of occurrences of internal and primary resonance instances, the stability of the steady-state solution is provided and evaluated. One of the energy harvesting (EH) systems was studied [21] to convert the oscillating motion into electrical energy, in which an electromagnetic device is connected to a vibrating dynamical system. Recently, a new 3DOF system consisting of two connected segments was being dynamically analyzed [22]. It was illustrated that the many kinds of the system’s behavior are included, and Poincare’s maps, the bifurcation graphs, and Lyapunov exponent spectrums are depicted. The authors transformed the produced motion into electricity; in view of a connected piezoelectric transducer to the examined system. Graphical representations are used to examine the effects of various parameters on the output voltage and power.
Several academics have expressed interest in the absorbers uses for the development of various dynamical types because of their applications in the vibration engineering fields, e.g., [21,22,23,24,25,26]. In [21], the authors examined a 3DOF nonlinear SP to determine how a longitudinal absorber could be employed to stabilize and control the oscillation of a ship’s roll movement. As the suspension point rotates in an oval pattern, a tuned absorber behavior with 2DOF was analyzed [22]. The equations of frequency response are applied to evaluate the solutions at steady-state scenario in light of the stability conditions. The impact of a damped SP on the behavior of such a case was controlled [23]. According to the examined resonance possibilities of the system, the analysis of the stability motion of a connected transverse absorber to a nonlinear flexible spring was demonstrated [24]. The vibrational assessment for a jointed inverted pendulum with the inert mass of an absorber was covered [25]. It was demonstrated in [26], how to automatically change the rotatory speed of a pendulum absorber by detecting the phase between the absorber oscillation and the primary vibration.
Additionally, several pendulum variations were investigated [27,28,29,30,31,32]. In pendulum-type systems, trigonometric functions are used to express the geometric nonlinearities that characterize their nature. Therefore, the polynomial approximation for quadratic means was used [27]. The trigonometric functions are approximated on a given interval rather than around a given point. The method of discrete mapping was used [28] to get the bifurcation trees of period-1 to period-2 movements in a regularly forced, nonlinear SP model. The passive oscillation reduction for a nonlinear system of spring’s pendulum, which simulates the motion of a rolling ship, was investigated [29]. According to [30], the control system is used to minimize the vibration brought on by the rotor blades flapping, in which the impact of a time-delay absorber on a vibrating system under the positive impact of several parametric excitation forces was examined. An overview of the numerical dynamic analysis and experimental of an actuated spherical pendulum was provided [31]. The stability response in a vertical plane is theoretically demonstrated for an auto-parametric resonance domain. The motion of a subjected triple-rigid-body pendulum to three external moments was studied [32]. In [33], the oscillating control of a pendulum with 3DOF on a cart is examined, in which the stability criteria, along with the bifurcations in addition to the stability of periodic frequency movements with constrained amplitude, are explored. The stability analysis of unscratched multiple pendulums under the effect of outer harmonic force and moments is studied, respectively, in [34,35,36]. Evaluation of stability/instability zones for diverse frequency response characteristics is examined.
In light of potential significance of the aforementioned topics, this work is concerned with the movement of a 3DOF auto-parametric dynamical system that is composed of two parts. The first one is a connected mass with a damped spring, in which it moves horizontally, while the second part is linked with the first and consists of a supported rigid body with one end of a uniform link, and the other end linked with the first mass. Based on the number of DOF of the system, the second-order LE are applied to generate the controlling system of motion (CSM), which consists of three nonlinear second-order differential equations (DEs). Utilization of the MSM is considered a cornerstone of the foundation of this system’s new approximate solutions. The criteria of solvability are obtained by leaving out secular terms. All emerging resonance cases are grouped, in which three of them are looked at once to derive the ME. To emphasize the positive effects of different factors on the motion, the frequency response curves (FRC) and TH of the estimated solutions are presented. The RKA is used to calculate the numerical outcomes of the original GSM. The precision of the approach used is demonstrated through the comparison between the numerical results and the approximate ones. The steady-state solutions are looked at, while the RHC are used to evaluate different stability/ instability domains. In essence, the MSM is a conventional approach used to solve a novel dynamical system. The discovered results are then regarded as novel since they were not previously obtained, demonstrating the originality of this work.
Overview of the Problem
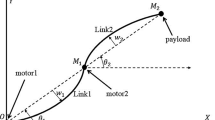
This section is presented to illustrate the investigated auto-parametric dynamical system. Let us consider a horizontal motion of a connected mass \(m_{1}\) with a massless damped spring of stiffness \(k\), translation damping coefficient \(b_{1}\), and normal length \(r_{0}\). Furthermore, a mass \(m_{2}\) of a uniform link of length \(l_{1}\) is connected with \(m_{1}\) at one of its ends, while a linear viscous damping \(b_{2}\) in the rotation is considered. The second end is lined to a rigid body of mass \(m_{3}\) and length \(l_{2}\), and a damping coefficient \(b_{3}\). A force \(F(t)\) is considered to act on the mass \(m_{1}\) horizontally. Two excitation moments \(G_{1} (t)\) and \(G_{2} (t)\) are considered to operate on the link and the rigid body, as seen in Fig. 1. Consequently, the motion may be described by the coordinates \(X(t),\theta (t),\) and \(\phi (t)\) which represent, respectively, the translation of \(m_{1}\), rotation of the link, and rotation of the rigid body.

Sketches dynamical movement of the system
According to the preceding description, the system’s potential and kinetic energies \(V\) and \(T\) have the forms
where \(M = m_{1} + m_{2} + m_{3}\) and \(l_{2} \,\) is equal to the distance AB.
The following LE can be used to obtain the GSM as follows
where \((X,\theta ,\phi ),\)\((\dot{X},\dot{\theta },\dot{\phi }),\) and \(Q_{j} \,\,\,(j = 1,2,3)\) are, respectively, the coordinates, velocities, and forces. These forces have the forms
where
Here, \(F^{ * } ,\,\,G_{k}^{ * } \,\,(k = 1,2)\) and \(\Omega_{j} \,(j = 1,2,3)\) are the amplitudes and frequencies of \(F(t)\) and \(G_{k}\).
Let's move on to the dimensionless parameters that we use
The required CSM may be obtained in its dimensionless form by the substitution of (1), (3), (4), and (5) into (2)
where
Three nonlinear second-order DEs are provided by the previous set of Eq. (6) in terms of \(x,\theta ,\) and \(\phi\). Here, \(\Theta^{\prime}\) and \(\Theta^{\prime\prime}\) are the first and second derivative matrix, respectively. Moreover, \(A,B,\) and \(C\) are the coefficients matrix of \(\Theta^{\prime\prime},\,\Theta^{\prime},\) and \(\Theta^{{\prime}{2}}\), while \(D\) and \(E\) are the absolute limit matrix and right hand side.
The Suggested Perturbation Method
The purpose of this part is to use the ASM to categorize all various resonance cases and to get the AS of the CSM (6). This can be achieved by approximating the trigonometric functions \(\theta\) and \(\phi\) up to the third order in the region surrounding the static equilibrium location. Therefore, the CSM (6) may be expressed as follows
It is important to understand that the coordinates \(x,\theta ,\) and \(\phi\), must be redefined in terms of a tiny parameter \(0 < \,\varepsilon < < 1\). Consequently, additional variables \(\chi ,\psi ,\) and \(\gamma\) can be inserted as follows:
Now, we may look for these variables as power series of this parameter [7]
Here, \(\tau_{0} = t,\,\,\tau_{1} = \varepsilon t,\) and \(\tau_{2} = \varepsilon^{2} t\) are various time scales in which \(\tau_{0}\) represents a fast scale, while \(\tau_{1}\) and \(\tau_{2}\) are known as the slow time scales. Hence, the below operators can be used to turn the derivatives regarding \(t\) into suitable ones regarding these scales [7]:
Taking into account the smallness of the parameters \(\beta_{j} ,\mu_{j} ,\eta_{j} ,F_{0} ,J_{1} ,J_{2} ,g_{1} ,\) and \(g_{2} \,\,\,(j = 1,2,3)\) as below
where \(\tilde{\beta }_{j} ,\tilde{\mu }_{j} ,\tilde{\eta }_{j} ,\tilde{F}_{0} ,\tilde{J}_{1} ,\tilde{J}_{2} ,\tilde{g}_{1} ,\) and \(\tilde{g}_{2}\) are parameters of unity-order.
We insert (12–15) into (9–11) and then equating the coefficients of same powers of \(\varepsilon\) in both sides and create:
Order of ε
Order of \(\varepsilon^{2}\):
Order of \(\varepsilon^{3}\):
The previous PDEs (16–24) can be solved sequentially. Equations. (16–18) of order \(\varepsilon\) may have the below general solutions
Here \(A_{j} \,\,(j = 1,2,3)\) and \(\overline{A}_{j}\) stand, respectively, for undetermined complex function and their complex conjugate.
Knowing these solutions, we can substitute in Eqs. (19–21), and then exclude terms that lead to secular ones to obtain directly the next conditions
Hence, the system’s second-order solutions can be expressed in the following form
where \(cc\) is used to denote the complex conjugates of preceding terms.
Similarly, one may deduce the next criteria for removing secular terms from the third-order approximation in light of the substitution of the solutions (25)–(27) and (31)–(33) into Eqs. (22–24).
As a result, the approximations \(\theta_{3} ,\phi_{3} ,\) and \(\chi_{3}\) of third order have the forms
By examining the conditions (28–30) and (34–36), the undetermined functions \(A_{j} \,(j = 1,2,3)\) can be calculated. In order to quickly obtain the required AS, one can substitute the solutions (25–27), (31–33), (37–39), and the series (13) into the hypothesis (12).
As already mentioned, dealing with the MSM requires the use of an infinite number of different time scales as opposed to a single time variable. The proper consequence for this flexibility is thought to be the solvability requirements, which involves the cancelation of secular components. The structure of the estimated solutions is constrained by fast time scales. The consistency of the solvability criteria for the various orders must also be confirmed. These conditions impose a limit on the amplitudes of “free” resonant phrases that emerge in each expansion order. If the constraints are not met, the analysis could produce incorrect results or only allow basic solutions. Alternative free amplitude possibilities could produce conflicting results; it should be noted [37].
Resonance Classifications
It must be mentioned that the classification of resonance cases that could appear in the last two orders of solutions, as well as the analysis of three of produced cases, are considered important part of the present section. It is widely known that resonance instances happen when the denominators of these components converge to zero [38]. Consequently, it might be characterized as:
-
(i)
A main primary external resonance exists at \(p_{1} \approx 1,p_{2} \approx \sqrt {\frac{{\eta_{3} }}{2}} \omega ,\) and \(p_{3} \approx \sqrt {\frac{{J_{2} }}{{J_{1} }}} \varpi\).
-
(ii)
Internal resonance occurs if \(\omega \approx 1,\varpi \approx \omega ,\) and \(\varpi \approx 1\) are satisfied.
It is stated that we should anticipate problematic behavior from the examined model if any one of the aforementioned resonance cases have been satisfied. In addition, the strategy outlined above is still applicable if the oscillations have various values that are different from the resonance. We shall examine the three primary external resonances to deal with this case. To accomplish this purpose, it is essential to use dimensionless parameters known as \(\sigma_{j} \,(j = 1,2,3)\), which measure the distance between the oscillations and the strict resonance. Hence, we will be able to write
We may express them in terms of \(\varepsilon\) in accordance with
To obtain the below solvability requirements, substitute (40) and (41) into (19–24) and then remove terms that produce secular ones.
Prerequisites for the approximation of second order
Prerequisites for the approximation of third order
It is obvious that the aforementioned criteria (42)–(47) can be used to define the functions \(A_{j} \,(j = 1,2,3)\), and they can be expressed in the following polar form [38].
where \(\psi_{j}\) are the phase angles,\(\theta_{j}\) are the modified phases, and \(a_{j}\) are the amplitudes.
Substituting Eq. (48) into Eqs. (42–47) and separating the imaginary and real parts from the produced equations, below ODEs of modulation can be obtained
It must be mentioned that this system consists of six first-order DEs, in which it is solved numerically to represent the TH of the amplitudes \(a_{j} \,(j = 1,2,3)\) and the adjusted phases \(\theta_{j}\). For this purpose, the below data have been used
Therefore, Figs. 2 and 3 are graphed when \(G_{2} ( = 0.4,0.6,\,\,0.9)\), in addition to the other above values. The inspection of the parts of Fig. 2 explores that decay waves have been obtained with the change of \(G_{2}\) values, in which there is no variation of the amplitudes \(a_{1}\) and \(a_{2}\), as seen in Fig. 2a and b, respectively. However, the amplitudes \(a_{3}\) are influenced with the values of \(G_{2}\) to produce periodic waves with the same wavelengths, as graphed in Fig. 2c. The reason backs to the mathematical formulas of system (49), where solutions \(a_{1}\) and \(a_{2}\) are independent of \(G_{2}\), while \(a_{3}\) depends directly on \(G_{2}\).

Sketches the influence of various values of \(G_{2} ( = 0.4,0.6,\,0.9)\) on the TH behavior of the amplitudes: a \(a_{1}\), b \(a_{2}\), and c \(a_{3}\)

Describes the good action of \(G_{2} ( = 0.4,0.6,\,0.9)\) on TH behavior of: a \(\theta_{1}\), b \(\theta_{2}\), and c \(\theta_{3}\).
When looking at Fig. 3a and b, one can conclude that the phases \(\theta_{1}\) and \(\theta_{2}\) increase and decrease gradually without any variation, respectively, with the change of \(G_{2}\). On the other hand, the behavior of \(\theta_{3}\) changes periodically alone the whole of time interval, as drawn in Fig. 3c.
The projections of the graphed curves in Figs. 2 and 3 in the planes \(\theta_{j} a_{j} \,\,(j = 1,2,3)\) have been plotted in parts of Fig. 4. As noted before, there is no change of the generated decay curves in the planes \(\theta_{1} a_{1}\) and \(\theta_{2} a_{2}\) for the same aforementioned reason, as indicated in Fig. 4a and b, respectively. On contrary, symmetric closed curves have been seen in Fig. 4c with the change of \(G_{2}\). At all these curves, whether their behavior is decaying or they take the form of a closed curve, they express the stable behavior of the solutions of system (49).

Characterizes the projections of \(a_{j} \,\,(j = 1,2,3)\) and \(\theta_{j}\) at \(G_{2} ( = 0.4,0.6,\,0.9)\) in the planes: a \(a_{1} \theta_{1}\), b \(a_{2} \theta_{2}\), and c \(a_{3} \theta_{3}\)
The TH of the achieved AS using MSM for various values of \(G_{2}\) have been graphed in parts of Fig. 5, to generate quasi-periodic waves, which assert the stationary behavior of these solutions. The solutions \(x\) and \(\phi\) are impacted with the change of \(G_{2}\), while the last one \(\theta\) are not influenced, to some extent, with the distinct values of the same parameters.

Displays the impact of \(G_{2} ( = 0.4,0.6,\,0.9)\) values on the TH of the solutions: a \(x\), b \(\theta\), and c \(\phi\)

Reveals the phase plane plots when \(G_{2} ( = 0.4,0.6,\,0.9)\) in the planes: a \(x\), b \(\theta\), and c \(\phi\)
To complete the process of confirming that these solutions are stable, graphs of the phase plane have been presented, which combine the AS and their first derivatives in a plane, as in the parts of Fig. 6. These parts have been calculated at aforementioned values of \(G_{2}\), which, in turn, shows that these solutions are stable, as the curves drawn are closed, which indicates the stability of these solutions. It should be noted that the effect of other parameters has been studied, but they do not have a clear effect on the system, such as \(G_{2}\), (see Figs. 7, 8, 9).

Displays the impact of \(F( = 0.002,0.04,\,0.6)\) values on the TH of the solutions: a \(x\), b \(\theta\), and c \(\phi\)

Reveals the phase plane plots when \(G_{1} ( = 0.003,0.05,\,0.7)\) in the planes: a \(x\dot{x}\), b \(\theta \dot{\theta }\), and c \(\phi \dot{\phi }\)

Sketches the influence of \(b_{3} ( = 0.00004,0.0006,\,0.008)\) on the TH behavior of the amplitudes: a \(a_{1}\), b \(a_{2}\), and c \(a_{3}\)
On the other hand, the 4RKA is used to obtain the NS of the original CSM when \(\omega = \,2.26053,\)\(x(0) = - 0.025563,\) \(x^{\prime}(0) = 0.0010305,\,\) \(\theta (0) = 0.312432,\)\(\theta^{\prime}(0) = 0.00284862,\) \(\phi (0) = 0.0512162\) and \(\phi^{\prime}(0) = 0.00147746\) in addition to the same values of other parameters. These solutions have been compared with the AS, as displayed in parts of Fig. 10, which reveals an excellent matching between them and gives a good induction about the accuracy of the perturbation approach.

Describes the compatibility between AS and NS when \(G_{2} ( = 0.4,0.6,\,0.9)\) for the solutions: a \(x\), b \(\theta\), and c \(\phi\)
Examination of the Steady-State Case
This objective of the present section is to investigate the vibrations of the examined dynamical system at the steady-state situation. To achieve this objective, we take into account the null value for the first derivatives of \(\theta_{j} \,\,\,(j = 1,2,3)\) and \(a_{j}\) in system (49), i.e., \(\frac{{d\theta_{j} }}{d\tau } = \frac{{da_{j} }}{d\tau } = 0\) [39]. As a result, the below set of algebraic equations involving the variables \(\theta_{j}\) and \(a_{j}\) is produced
This system can be reduced to another suitable one regarding \(a_{j}\) and \(\sigma_{j}\) through the removing of \(\theta_{j}\), to obtain
It is significant to highlight that a crucial aspect of the examination of stability is the steady-state solutions scenario. To investigate the behavior surrounding a zone of neighborhood fixed points, let us evaluate the below substitutions into the aforementioned system (49) [40, 41]
where \(a_{j1}\) and \(\theta_{j1}\) are the corresponding small perturbations of the steady-state solutions \(a_{j0}\) and \(\theta_{j0}\) of system (50). Hence, one may write the linearized system of (49) as
If \(a_{j1}\) and \(\theta_{j1}\) are expressed exponentially as \(q_{k} e^{\lambda T}\), we can obtain the solutions of the above system. Here, \(q_{k} \,(k = 1,2,...,6)\) are constants and \(\lambda\) represents eigenvalues for the unidentified perturbations. If the steady-state solutions \(a_{j0}\) and \(\theta_{j0}\) are asymptotically stable, then the roots’ real parts of the below characteristic equations must be negative [42]
Thus, \(\Gamma_{k}\) represents functions of the unperturbed parameters \(a_{j0}\) and \(\theta_{j0}\), (see Appendix 1).
For the solutions at the steady-state case, the RHC [18] present the next required and sufficient conditions
For more convenience, the previous theoretical outcomes can be computationally displayed throughout the next section.
Stability Discussion of the System
The dynamical motion of the system under consideration is analyzed utilizing a linear stability analysis in the current section. In addition to modeling the equations of the nonlinear system, the stability requirements are carried out. It has been found that convinced characteristics, including natural frequencies \(1,\omega ,\varpi\) and detuning parameters \(\sigma_{j}\) are crucial in compromising the stability requirements. The stability graphs of the system are plotted using a developed procedure with various parameters of the system (49). Plotting the amplitudes \(a_{j}\) of the oscillations with \(\sigma_{j}\) for several parametric regions demonstrates how these parameters may affect the potential fixed points, as seen in Figs. 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, and 21. In general, the regions of stable and unstable fixed points under the current restrictions of the chosen values of the influenced parameters, respectively, are in the ranges of \(\sigma_{j} \le - 6.4\) and \(- 6.4 < \sigma_{j} ,\,j( = 1,2,3)\). It must be mentioned that the domain of stable fixed points is reflected by solid curves, whereas dashed curves are unstable.

Displays the FRC at \((\sigma_{1} = 0.1,\sigma_{2} = 0.2),\) \((\sigma_{1} = 0,\sigma_{2} = 0),\) and \((\sigma_{1} = 0.1,\sigma_{2} = - 0.2)\) in the planes: a \(\sigma_{3} a_{1}\), b \(\sigma_{3} a_{2}\), and c \(\sigma_{3} a_{3}\)

Shows the relation between \(a_{j} \,\,(j = 1,2,3)\) and \(\sigma_{3}\) when \((\sigma_{1} = - 0.1,\sigma_{2} = 0.2),\) \((\sigma_{1} = 0,\sigma_{2} = 0),\) and \((\sigma_{1} = 0.1,\sigma_{2} = 0.2)\) in the planes: a \(\sigma_{3} a_{1}\), b \(\sigma_{3} a_{2}\), and c \(\sigma_{3} a_{3}\)

Presents \(a_{j} \,\,(j = 1,2,3)\) as a function of \(\sigma_{3}\) when \((\sigma_{1} = - 0.1,\sigma_{2} = 0),\) \((\sigma_{1} = 0,\sigma_{2} = 0),\) and \((\sigma_{1} = 0.1,\sigma_{2} = 0)\) in the planes: a \(\sigma_{3} a_{1}\), b \(\sigma_{3} a_{2}\), and c \(\sigma_{3} a_{3}\)

Illustrates the FRC at \(\sigma_{1} = 0.1\) and \(\sigma_{2} = 0.2\) when \(G_{2} ( = 0.4,0.6,0.9)\) in the planes: a \(\sigma_{3} a_{1}\), b \(\sigma_{3} a_{2}\), and c \(\sigma_{3} a_{3}\)

Displays the FRC at \(\sigma_{1} = 0.1\) and \(\sigma_{2} = 0.2\) when \(G_{2} ( = 0.4,0.6,0.9)\) in the planes: a \(\sigma_{1} a_{1}\), b \(\sigma_{1} a_{2}\), and c \(\sigma_{1} a_{3}\)

Displays the FRC at \((\sigma_{2} = 0.1,\sigma_{3} = 0.2),\) \((\sigma_{2} = 0,\sigma_{3} = 0),\) and \((\sigma_{2} = 0.1,\sigma_{3} = - 0.2)\) in the planes: a \(\sigma_{1} a_{1}\), b \(\sigma_{1} a_{2}\), and c \(\sigma_{1} a_{3}\)

Sketches the FRC at \((\sigma_{2} = - 0.1,\sigma_{3} = 0.2),\) \((\sigma_{2} = 0,\sigma_{3} = 0),\) and \((\sigma_{2} = 0.1,\sigma_{3} = 0.2)\) in the planes: a \(\sigma_{1} a_{1}\), b \(\sigma_{1} a_{2}\), and c \(\sigma_{1} a_{3}\)

Explores the FRC at \((\sigma_{2} = - 0.1,\sigma_{3} = 0),\) \((\sigma_{2} = 0,\sigma_{3} = 0),\) and \((\sigma_{2} = 0.1,\sigma_{3} = 0)\) in the planes: a \(\sigma_{1} a_{1}\), b \(\sigma_{1} a_{2}\), and c \(\sigma_{1} a_{3}\)

Shows the variation of FRC at \((\sigma_{2} = 0.1,\sigma_{3} = 0.2),\) \((\sigma_{2} = 0,\sigma_{3} = 0),\) and \((\sigma_{2} = 0.1,\sigma_{3} = - 0.2)\) in the planes: a \(\sigma_{2} a_{1}\), b \(\sigma_{2} a_{2}\), and c \(\sigma_{2} a_{3}\)

Presents the FRC at \((\sigma_{2} = - 0.1,\sigma_{3} = 0.2),\) \((\sigma_{2} = 0,\sigma_{3} = 0),\) and \((\sigma_{2} = 0.1,\sigma_{3} = 0.2)\) in the planes: a \(\sigma_{2} a_{1}\), b \(\sigma_{2} a_{2}\), and c \(\sigma_{2} a_{3}\)

Sketches the variation of the FRC at \(G_{2} ( = 0.4,0.6,0.9)\) when \(\sigma_{1} = 0.1\) and \(\sigma_{3} = 0.2\) in the planes: a \(\sigma_{2} a_{1}\), b \(\sigma_{2} a_{2}\), and c \(\sigma_{2} a_{3}\)
The FRC in the planes \(a_{j} \sigma_{3} \,\,(j = 1,2,3)\) have been calculated when \(\omega = 2.26053\) at \((\sigma_{1} = 0.1,\sigma_{2} = 0.2),\) \((\sigma_{1} = \sigma_{2} = 0),\) and \((\sigma_{1} = 0.1,\sigma_{2} = - 0.2)\), as seen in Fig. 11. It must be mentioned that two and three critical fixed (CF) points have been generated in Fig. 11a and b, respectively. On the other hand, one of CF points and one peak fixed (PF) point have been noted in Fig. 11c. Inspection of the third equation of system (51) reveals that the amplitude \(a_{3}\) can be expressed as a function of \(\sigma_{3}\), and then one can obtain the plotted curve in Fig. 11c. On the contrary, it has been shown from the first two equations in the mentioned system that the amplitudes \(a_{1}\) and \(a_{2}\) are invariant with respect to \(\sigma_{3}\), in which they are functions of \(\sigma_{1}\) and \(\sigma_{2}\). Therefore, there is no change in the drawn curves which take the forms of straight lines.
Curves of Fig. 12 are drawn at \((\sigma_{1} = - 0.1,\sigma_{2} = 0.2),\) \((\sigma_{1} = 0.1,\sigma_{2} = 0.2),\) and \((\sigma_{1} = \sigma_{2} = 0)\) besides the same value of \(\omega\) as considered in Fig. 7. Due to the mathematical structure of system (51), three and two CF points are observed, respectively, in Fig. 12a and b, while one CF and one PF point are noted in Fig. 12c. However, there is no change, to some extent, with the considered values of \(\sigma_{1}\) and \(\sigma_{1}\), as drawn in portion (c).
Three CF points and another one are observed, respectively, in Fig. 13a and b, where no peaks are detected in the planes \(\sigma_{3} a_{1}\) and \(\sigma_{3} a_{2}\). Whereas in the plane \(\sigma_{3} a_{3}\), there exists two peaks and two CF points are noted.
At \(G_{2} ( = 0.4,0.6,0.9),\)\(\sigma_{1} = 0.1,\sigma_{2} = 0.2,\) and \(\omega = 2.26053\), there is no variation in the planes \(a_{1} \sigma_{3}\) and \(a_{2} \sigma_{3}\) regarding the plotted FRC, as seen in Fig. 14a and b. On the contrary, three PF points have been appeared in the plane of FRC \(a_{3} \sigma_{3}\), see Fig. 14c.
Figures 15, 16, and 17 are graphed to show the variation of the FRC in the planes \(\sigma_{1} a_{j} \,\,(j = 1,2,3)\) when \(\omega = 2.26053,\){\(\,G_{2} ( = 0.4,0.6,0.9),\)\(\sigma_{1} = 0.1,\sigma_{2} = 0.2\)},\(\{ \sigma_{2} ( = 0.1,0,0.1),\sigma_{3} ( = 0.2,0, - 0.2)\} ,\) and \(\{ \sigma_{2} ( = - 0.1,0,0.1),\sigma_{3} ( = 0.2,0,0.2)\}\). One of CF and PF points are generated in the plane \(\sigma_{1} a_{1}\), as seen in portion (a) of these figures. Two points of each category are plotted in Figs. (15b), (16c), and (17b). Three CF are explored in Figs. 15c, 16b, and 17c. In general, the stability and instability areas in the mentioned figures are noted, respectively, less and greater than the corresponding ones in Figs. 11, 12, and 13.
The graphed curves in Fig. 18 have been sketched in the planes \(\sigma_{1} a_{j} \,\,(j = 1,2,3)\) at \(\omega = {2}{\text{.26053}}\) when \((\sigma_{2} = - 0.1,\sigma_{3} = 0),\) \((\sigma_{2} = 0,\sigma_{3} = 0),\) and \((\sigma_{2} = 0.1,\sigma_{3} = 0)\). There are one PF and two CF points in the plane \(\sigma_{1} a_{1}\) as displayed in Fig. (18a), while there exist two PF and CF as observed in Fig. 18b. However, one of PF and CF points has been drawn in Fig. 18c.
Parts of Figs. 19 and 20 are drawn in the planes \(\sigma_{2} a_{j} \,(j = 1,2,3)\) of FRC when \(\omega = 2.26053\) in addition to the values \((\sigma_{1} = 0.1,\sigma_{3} = 0.2),\) \((\sigma_{1} = 0,\sigma_{3} = 0),\) and \((\sigma_{1} = 0.1,\sigma_{3} = - 0.2)\). Multiple CF points have been noted in the plane \(\sigma_{2} a_{1}\) and \(\sigma_{2} a_{3}\), as seen in parts (a) and (c). Whereas, only one peak and one critical point in the plane \(\sigma_{2} a_{2}\) has been explored.
The variation of the stability and instability areas of the FRC at various values of \(G_{2} ( = 0.4,0.6,0.9)\) is drawn in parts of Fig. 18 when \(\omega = {2}{\text{.26053}}\). It must be noted that, the small ranges of the amplitudes \(a_{j}\) constitute our aim, which is to reduce these amplitudes as much as possible. In other words, harmful vibrations are related to the large amplitudes, which were dealt in this study.
Nonlinear Analysis
This present section demonstrates the properties of the nonlinear amplitude of system (49) and their stabilities. As a result, let us consider the below transformations [43, 44].
where amplitudes’ real and imaginary parts are, respectively \(u_{j}\) and \(v_{j}\). Substituting (56) into Eqs. (42–44) and Eqs. (45–47), and then separating the real and imaginary portions to get
The above system has been solved numerically and represented graphically, as drawn in Figs. 22, 23, and 24, according to the following data of the used parameters

a Describes the variation of \(u_{1}\) via time \(\tau\), b reveals the variation of \(v_{1}\) versus time \(\tau\), and c represents the projections of the amplitudes’ paths on the \(u_{1} v_{1}\) plane when \(G_{2} ( = \,0.4,0.6,\,0.9).\)

a and b Sketch the functions \(u_{2} (\tau )\) and \(v_{2} (\tau )\), while c explores the waves in the plane \(u_{2} v_{2}\) at \(G_{2} ( = \,0.4,0.6,\,0.9).\)

a and b Reveal the waves \(u_{3} (\tau )\) and \(v_{3} (\tau )\), whereas c presents of the functions \(u_{3}\) and \(v_{3}\) in the plane \(u_{3} v_{3}\) at \(G_{2} ( = \,0.4,0.6,\,0.9).\)
The modified amplitudes \(u_{j}\) and \(v_{j}\) were periodically checked in various parametric regions and the projections of the amplitudes in phase-planes \(u_{j} v_{j}\) have been presented, as explored in the portions (a), (b), and (c) of these figures.
Curves of temporal history of the functions \(u_{j}\) and \(v_{j}\) have periodic forms when \(\,G_{2} ( = \,0.4,0.6,\,0.9)\), as drawn in portions (a) and (b) of Fig. 22, 23, 24. The conclusion that may be made here is that the above dynamical system (57) has stable behavior during the examined time interval. It is noted also that, the waves of \(u_{1} ,v_{1} ,u_{2} ,\) and \(v_{2}\) do not have any change with the considered different values of \(G_{2}\). The other two amplitudes \(u_{3}\) and \(v_{3}\) have been impacted with the change of these values, where the oscillations number increases to somewhat while their amplitudes remain stationary, as seen in Fig. 24a,b. The reason goes back to the dependence of the mathematical formulas of these amplitudes on \(G_{2}\) or not. The included curves in parts (c) of the mentioned figures in this section are plotted in the planes \(u_{j} v_{j}\) to constitute the phase plane diagrams, in which the dimensionless time parameter has been removed. The sketched curves have the forms of closed curves, which support the described stable dynamical system behavior.
Conclusion
The planar movement of a 3DOF auto-parametric dynamical system has been studied as a new model. The second-order LE have been used to formulate the CSM according to the system’s number of DOF, in which it consists of two nonlinear DEs in rotation and one translational. The use of the MSM is regarded as the cornerstone of achieving the new approximate results of the CSM provided by this system. The removing of secular terms provides the conditions for solvability. All constructing resonance situations have been grouped wherein three of them are evaluated at once, to determine the ME. The FRC and TH of the estimated solutions have been graphically depicted to highlight the beneficial effects of the applied parameters on the motion’s behavior. The numerical results of the original CSM are computed using the RKA and they are compared with the archived results of the perturbation approach. The stability and instability zones of the fixed points at the scenario of steady-state have been checked in light of RHC. The nonlinear stability analysis has been provided to check the steady behavior of the examined system. Since the results of this work can be applied to many engineering applications in which vibrational control is used, this lends it significant scientific interest and weight. The related applications can be confined to the analysis of flexible arm robotics, pumps, compressors, transportation cars, rotor dynamics, shipboard cranes, and human walking.
Data Availability
Data sharing is not appropriate for this research because no datasets were created or analyzed.
Change history
17 February 2024
A Correction to this paper has been published: https://doi.org/10.1007/s42417-024-01304-4
References
Amer WS, Amer TS, Starosta R, Bek MA (2021) Resonance in the cart-pendulum system-an asymptotic approach. Appl Sci 11(23):11567
Weele JP, Kleine E (1996) The order-chaos-order sequence in the spring pendulum. Physica A 228:00426
Bek MA, Amer TS, Magdy AS, Awrejcewicz J, Asmaa AA (2020) The vibrational motion of a spring pendulum in a fluid flow. Results Phys 19:103465
Lee WK, Park HD (1997) Chaotic dynamics of a harmonically excited spring-pendulum system with internal resonance. Nonlinear Dyn 14:3
Amer TS, Bek MA (2009) Chaotic responses of a harmonically excited spring pendulum moving in circular path. Nonlinear Anal 10(5):10030
Eissa M, El-Serafi SA, El-Sheikh M, Sayed M (2003) Stability and primary simultaneous resonance of harmonically excited non-linear spring pendulum system. Appl Math Comput 145(23):006
Nayfeh AH (2011) Introduction to perturbation techniques. John Wiley & Sons
Gitterman M (2010) Spring pendulum: parametric excitation vs an external force. Phys A 389(16):8
Starosta R, Kamińska GS, Awrejcewicz J (2011) Parametric and external resonances in kinematically and externally excited nonlinear spring pendulum. Int J Bifurcat Chaos 21(10):9
Amer TS, Bek MA, Hamada IS (2016) On the motion of harmonically excited spring pendulum in elliptic path near resonances. Adv Math Phys 2016:8734360
Starosta R, Kamińska GS, Awrejcewicz J (2012) Asymptotic analysis of kinematically excited dynamical systems near resonances. Nonlinear Dyn 68(4):11
El-Sabaa FM, Amer TS, Gad HM, Bek MA (2020) On the motion of a damped rigid body near resonances under the influence of harmonically external force and moments. Results Phys 19:103352
Awrejcewicz J, Starosta R, Kamińska GS (2013) Asymptotic analysis of resonances in nonlinear vibrations of the 3-dof pendulum. Differ Equ Dyn Syst 21:1-2–18
Joseph C (2004) An improved calculation of the mass for the resonant spring pendulum. Am J Phys 72:11
Rafael MD, Reiner M, Weizman Z (2005) Damping in a variable mass on a spring pendulum. Am J Phys 73(10):901–905
Petrov AG, Vanovskiy VV (2018) Nonlinear oscillations of a spring pendulum at the 1: 1: 2 resonance: theory, experiment, and physical analogies. Proc Steklov Inst Math 300(1):159–167
Amer YA, El-Sayed AT, Salem AM (2016) Vibration control in MEMS resonator using positive position feedback (PPF) controller. Adv Math 12(11):6821–6834
Strogatz SH (2015) Nonlinear dynamics and chaos: with applications to physics, biology, chemistry, and engineering, 2nd edn. Princeton University Press, Princeton
Yipeng W, Jinhao Q, Shengpeng Z, Hongli J, Yang C, Sen L (2018) A piezoelectric spring pendulum oscillator used for multi-directional and ultra-low frequency vibration energy harvesting. Appl Energy 231:600–614
Abohamer MK, Awrejcewicz J, Starosta R, Amer TS, Bek MA (2021) Influence of the motion of a spring pendulum on energy-harvesting devices. Appl Sci 11(18):8658
Abohamer MK, Awrejcewicz J, Amer TS (2022) Modeling of the vibration and stability of a dynamical system coupled with an energy harvesting device. Alex Eng J 63(4):21
Abohamer MK, Awrejcewicz J, Amer TS (2023) Modeling and analysis of a piezoelectric transducer embedded in a nonlinear damped dynamical system. Nonlinear Dyn 111:8217–8234
Eissa M, Kamel M, El-Sayed AT (2011) Vibration reduction of a nonlinear spring pendulum under multi external and parametric excitations via a longitudinal absorber. Meccanica 46:325–340
Amer WS, Bek MA, Abohamer MK (2018) On the motion of a pendulum attached with tuned absorber near resonances. Results Phys 11:291–301
Amer TS, Bek MA, Hassan SS, Sherif E (2021) The stability analysis for the motion of a nonlinear damped vibrating dynamical system with three-degrees-of-freedom. Results Phys 28:104561
Amer WS, Amer TS, Hassan SS (2021) Modeling and stability analysis for the vibrating motion of three degrees-of-freedom dynamical system near resonance. Appl Sci 11(24):11943
Anh ND, Matsuhisa H, Viet LD, Yasuda M (2007) Vibration control of an inverted pendulum type structure by passive mass-spring-pendulum dynamic vibration absorber. J Sound Vib 307:187–201
Wu S, Siao P (2012) Auto-tuning of a two-degree-of-freedom rotational pendulum absorber. J Sound Vib 331(13):3020–3034
Kamin GS, Awrejcewicz J, Henryk K, Robert S (2020) Resonance study of spring pendulum based on asymptotic solutions with polynomial approximation in quadratic means, Meccanica, Published online: 29 April (2020)
Albert CJ, Yaoguang Y (2020) Bifurcation trees of period-1 to period-2 motions in a periodically excited nonlinear spring pendulum. JVTSD 4(3):48
Eissa M, Kamel M, El-Sayed AT (2012) Vibration suppression of a four-degrees-of-freedom nonlinear spring pendulum via longitudinal and transverse absorbers. J Appl Mech 79:011007
El-Sayed AT, Bauomy HS (2014) Vibration control of helicopter blade flapping via time-delay absorber. Meccanica 49:587–600
Stanislav P, Cyril F, Náprstek J (2014) Experimental analysis of the influence of damping on the resonance behavior of a spherical pendulum. Nonlinear Dyn 78(1):371–390
Amer TS, El-Sabaa FM, Zakria SK, Galal AA (2022) The stability of 3-DOF triple-rigid-body pendulum system near resonances. Nonlinear Dyn 110(10):1339–1371
Glück T, Eder A, Kugi A (2013) Swing-up control of a triple pendulum on a cart with experimental validation. Automatica 49(3):8
Amer TS, Starosta R, Elameer AS, Bek MA (2021) Analyzing the stability for the motion of an unstretched double pendulum near resonance. Appl Sci 11:9520
Amer TS, Galal AA, Abolila AF (2021) On the motion of a triple pendulum system under the influence of excitation force and torque. Kuwait J Sci 48(4):17
Amer TS, Moatimid GM, Amer WS (2022) Dynamical stability of a 3-DOF auto-parametric vibrating system. J Vib Eng Technol. https://doi.org/10.1007/s42417-022-00808-1
Galal AA, Amer TA, Amer WS, Elkafly HA (2023) Dynamical analysis of a vertical excited pendulum using He’s perturbation method. J Low Freq Noise Vib Act Control 42(3):1328–1338
Amer TS, Starosta R, Almahalawy A, Elameer AS (2022) The stability analysis of a vibrating auto-parametric dynamical system near resonance. Appl Sci 12:1737
El-Sabaa FM, Amer TS, Gad HM, Bek MA (2022) Novel asymptotic solutions for the planar dynamical motion of a double-rigid-body pendulum system near resonance. J Vib Eng Technol 10:1955–1987
Amer TS, Bek MA, Nael MS, Sirwah MA, Arab A (2022) Stability of the dynamical motion of a damped 3DOF auto-parametric pendulum system. J Vib Eng Technol 10:1883–1903
He J-H, Amer TS, Abolila AF, Galal AA (2022) Stability of three degrees-of-freedom auto-parametric system. Alex Eng J 61(11):8393–8415
He C-H, Amer TS, Tian D, Abolila AF, Galal AA (2022) Controlling the kinematics of a spring-pendulum system using an energy harvesting device. J Low Freq Noise Vib Act Control 41(3):1234–1257
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). There was no explicit support for this study from any government, commercial, or non-profit organization.
Author information
Authors and Affiliations
Contributions
TSA: resources, conceptualization, methodology, data curation, supervision, validation, visualization, reviewing and editing. FME-S: resources, conceptualization, formal analysis, supervision, visualization and reviewing. GMM: methodology, conceptualization, supervision, reviewing. SKZ: visualization, conceptualization, investigation, writing—original draft preparation. AAG: supervision, resources, conceptualization, methodology, visualization, reviewing.
Corresponding author
Ethics declarations
Conflict of Interest
The authors have reported that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The original online version of this article was revised: The assignment of some authors to the affiliations was not correct.
Appendix 1
Appendix 1
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Amer, T.S., El-Sabaa, F.M., Moatimid, G.M. et al. On the Stability of a 3DOF Vibrating System Close to Resonances. J. Vib. Eng. Technol. 12, 6297–6319 (2024). https://doi.org/10.1007/s42417-023-01253-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-023-01253-4