
Abstract
Purpose
In the paper, a theoretical analysis—based on a 2D multibody model—is presented regarding active vibration control of a rotating machine with voltage-driven electrodynamic actuators between machine feet and steel frame foundation under multiple base excitations.
Methods
Mathematical formulations are derived in the time domain and then transferred into the Laplace domain, where a state space formulation is used to describe the controlled vibration system. With this mathematical formulations, it is possible to analyze separately the two different kinds of actuator forces—the actuator forces, caused by the motion-induced voltage and the actuator forces caused by the control system—and their influence on the vibration behavior. Afterward, the mathematical formulations are transferred into the Fourier domain, for considering harmonic excitations of the base. Also a numerical example is presented, where different cases regarding machine mounting and operation conditions are investigated and compared to each other.
Results
It could be clearly demonstrated that with the presented control system, most of the resonance peaks in the frequency responses could be strongly damped.
Conclusions
With the presented mathematical formulations, the controlled vibration system can be well described, considering separately the two different kinds of electrodynamic actuator forces and their influence.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The requirements regarding operational reliability of rotating machinery are nowadays very high and are still increasing [1]. For many applications with roller bearings, bearing failure due to high vibrations is one of the main reasons of failure. Typical excitations for rotating machines are, e.g., mechanical unbalance, bent rotor excitation and coupling misalignment ([2]–[6]).
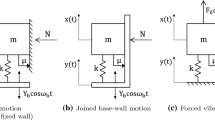
However, also base excitation may occur for special applications ([7]–[17]). For rotating machinery, it is helpful to differentiate between two different kinds of base excitations. On the one hand, base excitations are with large translational and angular time-varying displacements of the base. These kinds of base excitations in combination with a rotating rotor leads to equations of motion with time-varying parametric coefficients—representing a time-varying nature—and may cause parametric instability for certain frequencies and amplitude combinations of the base motion [7]. These applications may be transport applications, e.g., by ship or plane (e.g., aircraft turbine rotors) [8].
On the other hand, base excitations may also occur, if machines are mounted together on a common base, e.g., an electrical motor driving a reciprocating machine (e.g., a piston compressor) or a diesel engine coupled with a generator. Therefore, the vibrations, induced in the base by a machine, may excite other machines through base excitations. Here, the displacements of the base are usually very low. This kind of excitations here is the focus of this paper. In the case of, e.g., reciprocating machines, a spectrum of harmonic excitations with a lot of different excitation frequencies may occur ([9]–[17]), so that at each base connecting point different dominating base excitations—in amplitude, frequency and phase—may occur. Jadhav et al. showed in [10] design and standardization of the base frame for piston air compressors and investigated passive anti-vibration mounts, using a FE-analysis and measurement data. Also, the vibration characteristic at different base points has been investigated. Also, Kacani analyzed in [11] vibrations at different positions caused by a reciprocating compressor. Eberle investigated in [12] a foundation design with steel piles for a reciprocating compressor, using FE-analysis for numerical modal analysis and measurement results. Giorgetti et al. analyzed in [13] foundation dynamics of a reciprocating compressor and deduced a case study of different block foundations. Day et al. investigated in [14] a marine diesel generator set with the task to reduce vibrations. The diesel engine and the electrical generator were mounted on the same base. They measured the vibrations at different positions of the diesel engine and the generator at different rotor speeds for different order numbers. By using pneumatically controlled vibration absorber, the vibrations could be clearly reduced. Yang et al. deduced in [15] an experimental study for active vibration isolation of a diesel generator in a floating tugboat. They use electrodynamic inertial actuators, which were positioned at different positions of the base und reduce the base vibrations. Wang et al. analyzed in [16] the use of an active and passive hybrid isolator—which was based on Halbach magnetic array—for a WD618 diesel engine. Ren et al. investigated in [17] a passive/active isolator, consisting of a double-layer rubber and an electromagnetic actuator, to reduce wideband vibration of heavy machinery.
Also, active vibration control for common rotating machines is investigated and studied in several papers, e.g., [18]–[27], using different actuators and control concept. Ulbrich compared, e.g., in [18] different actuator concepts suitable for vibration control of rotating machines. The behavior of electrodynamic actuators for active vibration control is described, e.g., in [23] by Janschek. Gomis-Bellmunt and Campanile analyzed in [25] moving coil actuators and derived design rules. Paulitsch described in [26] the use of electrodynamic actuators for active vibration control to reduce resonance vibrations, and Chen et al. analyzed in [27] the use of a notch controller for active damping with voice coil motors.
This paper now focuses on the mathematical description of a 2D multibody model of a rotating machine with roller bearings and with voltage-driven electrodynamic actuators between steel frame foundation and machine feet under multiple base excitations considering active vibration control, where the vertical acceleration of each machine food is lead back to a separate controller (Fig. 1). The presented theoretical investigations are based on [28], where a generalized mathematical formulation for active vibration control of rotating machines with voltage‐driven electrodynamic actuators between machine feet and steel frame foundation has been derived. However, in [28], only a simple 1D model with I-controllers was presented as an academic example. The enhancement of this paper is now that a much more realistic model—a 2D multibody model of a rotating machine—is used, where special controller functions are implemented. Also, the excitation is here not a rotor unbalance force, as it is in the example in [28], but multiple base excitations at each machine side (left and right side of the machine). Therefore, the novelty of the paper is that, on the one side, a detailed 2D-mulitbody model of a rotating machine under multiple base excitations is coupled with a vibration control system, where voltage-driven electrodynamic actuators between machine feet and foundation are used, as well as acceleration feedbacks of the machine feet in combination with a special controller design, and that, on the other side, analytical mathematical formulations of the complete vibration system are presented, where also the two different kinds of actuator forces—actuator forces caused by the control system and actuator forces caused by motion induced voltage—are described, so that they and their influence on the vibration system can be analyzed separately.

Rotating machine with roller bearings and voltage-driven electrodynamic actuators between machine feet and steel frame foundation under multiple base excitations; a front view, b side view, and c voltage-driven electrodynamic actuator (principle design)
Vibration Model
Figure 2 presents a simplified 2D multibody model of a rotating machine with roller bearings and voltage-driven electrodynamic actuators between machine feet and steel frame foundation. The 2D multibody model is based on the model described in [29], however with following significant modifications. No electromagnetic coupling is here considered between rotor and stator, because a common rotating machine is here analyzed and not an induction motor. In the presented model, the actuators (mass, stiffness and damping) may be different on the left side and right side of the machine, whereas in [29], they were identical, so that here different actuators on the left side and right side are possible, which may be interesting, when considering vibration mode coupling by asymmetry [30]. An additional difference to [29] is that the horizontal distance between machine feet may here be asymmetrical (\({b}_{\mathrm{L}}\ne {b}_{\mathrm{R}})\) in this model. Furthermore, the excitation in [29] was a dynamic air gap torque of the induction motor, and the analyzed outputs were dynamic foundation forces. Here, the excitations are multiple base excitations, and the focus is on the bearing housing vibrations as outputs. However, the most enhancement compared to [29] is that not only actuators as basic elements are used but specific actuators—voltage-driven electrodynamic actuators—and also their typical transfer functions. Therefore, also the controller design is here completely different to [29].

Active controlled 2D-multibody model of a rotating machine with roller bearings and voltage-driven electrodynamic actuators between machine feet and steel frame foundation under multiple base excitation
The 2D multibody model consists of several masses, which are as follows: the stator mass \({m}_{\text{s}}\) with the mass moment of inertia \({\theta }_{\mathrm{sx}}\) at the x-axis, the rotor mass \({m}_{\text{w}}\) and the shaft journal masses \({m}_{\text{v}}\)—both rotating with rotor angular frequency \(\Omega \)—the masses \({m}_{\text{b}}\) of the bearing housings and the masses of the actuators—stator masses \({m}_{{\text{as}}{\text{L}}}\) and \({m}_{{\text{as}}{\text{R}}}\) and the masses of the armature \({m}_{{\text{aa}}{\text{L}}}\) and \({m}_{{\text{aa}}{\text{R}}}\) at each machine side—as well as the foundation masses \({m}_{\text{fL}}\) and \({m}_{\text{fR}}\) for each machine side (left side and right side). The rotor stiffness \(c\) connects the rotor mass to the shaft journal masses. Internal (rotating) damping of the rotor is not considered here, as well as gyroscopic effects. The roller bearing stiffness matrices \({\mathbf{C}}_{\mathrm{r}}\) connect the shaft journal masses with the bearing housing masses and the bearing housing stiffness matrices \({\mathbf{C}}_{\mathrm{b}}\) connect the bearing housing masses to the stator mass. For these connections, damping is not considered here, because of the very low damping ratio. The structure of the stator is here supposed to be rigid. The mechanical stiffness and damping of the actuators on the left side are described by the matrices \({\mathbf{C}}_{\mathrm{aL}}\) and \({\mathbf{D}}_{\mathrm{aL}}\) and on the right side by \({\mathbf{C}}_{\mathrm{aR}}\) and \({\mathbf{D}}_{\mathrm{aR}}\). The actuator forces are described by \({f}_{\text{azL}}\) for the left side and by \({f}_{\text{azR}}\) for the right side. These values for the actuators may be different for both sides. Also, the stiffness and damping of the foundation, described by the matrices \({\mathbf{C}}_{\mathrm{fL}}\) and \({\mathbf{D}}_{\mathrm{fL}}\) for the left side and \({\mathbf{C}}_{\mathrm{fR}}\) and \({\mathbf{D}}_{\mathrm{fR}}\) for the right side, may be different. The chosen model is here a plane model. Therefore, only one acceleration sensor is placed on each machine side. With these sensors, the vertical machine feet accelerations \({a}_{\mathrm{aL}}\) (\(={\ddot{z}}_{\mathrm{aL}}\)) and \({a}_{\mathrm{aR}}\) (\(={\ddot{z}}_{\mathrm{aR}}\)) can be determined and transmitted to the controllers. The considered excitations are here multiple base excitations by vertical displacements \({z}_{\mathrm{eL}}\left(t\right)\) and \({z}_{\mathrm{eR}}\left(t\right)\) and by horizontal displacements \({y}_{\mathrm{eL}}\left(t\right)\) and \({y}_{\mathrm{eR}}\left(t\right)\). These base excitations can be analyzed separately or in combination.
Mathematical Description
Formulation in the Time Domain
First, the system is described mathematically in the time domain. To derive the differential equation system, the vibration system of Fig. 2 is cut free in separate systems, including all forces and moments, shown in Fig. 3. With the equations for equilibrium of forces and moments for each separate system and with the linearization of the machine feet displacements, based of small displacements, referring to [29]

Active controlled 2D multibody system cut free in separate systems
the differential equation system can be described by
Referring to [28], the dimension of each matrix and vector is described in the superscript brackets \(\left(\mathrm{n},\mathrm{m}\right)\), where \(n\) is the number of rows and \(m\) is the number of columns. The vector \({\mathbf{q}}^{\left(\mathrm{13,1}\right)}\left(t\right)\) represents the coordinates for the displacements and the rotation \({\varphi }_{\mathrm{s}}\) of the stator mass:
The mass matrix \({\mathbf{M}}^{\left(\mathrm{13,13}\right)}\), the damping matrix \({\mathbf{D}}^{\left(\mathrm{13,13}\right)}\) and the stiffness matrix \({\mathbf{C}}^{\left(\mathrm{13,13}\right)}\) of the 2D-multibody model are described in the appendix. The actuator force vector \({\mathbf{f}}_{\mathrm{a}}^{\left(\mathrm{13,1}\right)}\left(t\right)\) can be described by
The actuator force vector \({\mathbf{f}}_{\mathrm{a}}^{\left(\mathrm{13,1}\right)}\left(t\right)\) can be split into \({\mathbf{f}}_{\mathrm{azL}}^{\left(\mathrm{13,1}\right)}\left(t\right)\) and \({\mathbf{f}}_{\mathrm{azR}}^{\left(\mathrm{13,1}\right)}\left(t\right)\), which present the actuator force vectors on the left side and right side of the rotating machine, respectively,
with the actuator force distribution vectors:
The excitation vector \({\mathbf{f}}_{\mathrm{e}}^{\left(\mathrm{13,1}\right)}\left(t\right)\) can be described as follows:
It can be split into its components as follows:
with the excitation distribution vectors:
Now two new symbols are used further on. The symbol \(\varrho \) represents the vertical coordinate \(z\) and the horizontal coordinate \(y\), and the symbol \(\eta \) the left side \(L\) and right side \(R\) of the rotating machine:
Now, the excitation vector can be described by
Formulation in the Laplace domain
Now Eq. (2) is transferred into the Laplace domain with the Laplace variable \(s\), using a state space formulation, based on [28] and [31]–[35]. The initial conditions are set to zero:
In the paper, the index “st” is used for the matrices of the state space to avoid mix-up with the stiffness matrix \({\mathbf{C}}^{\left(\mathrm{13,13}\right)}\) and damping matrix \({\mathbf{D}}^{\left(\mathrm{13,13}\right)}\). The state space vector \({\mathbf{X}}^{\left(\mathrm{26,1}\right)}\left(s\right)\) and the output vector \({\mathbf{Y}}^{\left(\mathrm{39,1}\right)}\left(s\right)\) are described by
The system matrix \({\mathbf{A}}_{\mathrm{st}}^{\left(\mathrm{26,26}\right)}\), the input matrix \({\mathbf{B}}_{\mathrm{st}}^{\left(\mathrm{26,13}\right)}\), the output matrix \({\mathbf{C}}_{\mathrm{st}}^{\left(\mathrm{39,26}\right)}\), and the straight-way matrix \({\mathbf{D}}_{\mathrm{st}}^{\left(\mathrm{39,13}\right)}\) can be calculated by
with the zero-matrix \({\mathbf{0}}^{\left(\mathrm{13,13}\right)}\) and the unit-matrix \({\mathbf{I}}^{\left(\mathrm{13,13}\right)}\). Now, the actuator force vector \({\mathbf{F}}_{\mathrm{a}}^{\left(\mathrm{13,1}\right)}\left(s\right)\) will be derived. Based on [23] and [28], the actuator force for each machine side can be described in the Laplace domain:
The factor 2 has its origin in the fact that two identical actuators are here used for the same machine side. However, the actuators may be different on the left side and on the right side. \({K}_{\mathrm{ED},\mathrm{k\eta }}\) is the electrodynamic force constant, \({L}_{\mathrm{k\eta }}\) the coil inductance, and \({R}_{\mathrm{k\eta }}\) the coil resistance of each single actuator on the left side and on the right side. \({U}_{\mathrm{k\eta }}\left(s\right)\) is the drive voltage of each single actuator. The variable \({Z}_{\mathrm{a\eta }}\left(s\right)\) represents the vertical displacement of the top plate and the variable \({Z}_{\mathrm{f\eta }}\left(s\right)\) the displacement of the bottom plate of each actuator on the left side and on the right side. A negative feedback of the vertical acceleration of the top plate of each actuator—with \({A}_{\mathrm{za\eta }}\left(s\right)={Z}_{\mathrm{a\eta }}\left(s\right)\cdot {s}^{2}\)—is here used. Therefore, the driven voltage for each actuator can be calculated by
\({G}_{\mathrm{ck\eta }}\left(s\right)\) is the transfer function of each single controller, which is identical for the same machine side but may different on the left side and on the right side:
The values \({b}_{\mathrm{\mu k\eta }}\) and \({a}_{\mathrm{\nu k\eta }}\) represent the constants of the polynomial functions. Therefore, the actuator force \({F}_{\mathrm{a\eta }}\left(s\right)\) for each machine side can be split into an actuator force \({F}_{\mathrm{a},\mathrm{disp},\upeta }\left(s\right)\) representing an inherent system character, caused by relative displacement \(\left[{Z}_{\mathrm{a\eta }}\left(s\right)-{Z}_{\mathrm{f\eta }}\left(s\right)\right]\)—respectively, relative velocity, when considering the Laplace variable \(s\) in front of \(\left[{Z}_{\mathrm{a\eta }}\left(s\right)-{Z}_{\mathrm{f\eta }}\left(s\right)\right]\), which means that a motion-induced voltage causes a current, which leads to this kind of actuator force—and an actuator force \({F}_{\mathrm{a},\mathrm{cont},\upeta }\left(s\right)\), which is caused by the controller:
With the Laplace transformed kinematic constraints from (1),
follows for the actuator force on the left side \({F}_{\mathrm{azL}}\left(s\right)\) and for the actuator force on the right side \({F}_{\mathrm{azR}}\left(s\right)\):
The actuator force vector \({\mathbf{F}}_{\mathrm{a}}\left(s\right)\) in the Laplace domain can also be described by using the state space vector \(\mathbf{X}\left(s\right)\) and the actuator force transfer matrices \({\mathbf{T}}_{\mathrm{st},\mathrm{disp}}\left(s\right)\) and \({\mathbf{T}}_{\mathrm{st},\mathrm{cont}}\left(s\right)\). Therefore, the actuator force vector \({\mathbf{F}}_{\mathrm{a}}\left(s\right)\) can be split into vector \({\mathbf{F}}_{\mathrm{a},\mathrm{disp}}\left(s\right)\), caused by relative displacements, and the vector \({\mathbf{F}}_{\mathrm{a},\mathrm{cont}}\left(s\right)\), caused by the controllers:
With using Eqs. (25)–(27), the actuator force transfer matrix \({\mathbf{T}}_{\mathrm{st},\mathrm{disp}}^{\left(\mathrm{13,26}\right)}\left(s\right)\) can be described as follows:
with the abbreviations:
and with the zero-matrix \({\mathbf{0}}^{\left(\mathrm{13,17}\right)}\). The actuator force transfer matrices \({\mathbf{T}}_{\mathrm{st},\mathrm{cont}}^{\left(\mathrm{13,26}\right)}\left(s\right)\) can also be deduced by using Eqs. (25)–(27):
with the abbreviations:
and with the zero-matrix \({\mathbf{0}}^{\left(\mathrm{13,21}\right)}\). Setting the initial conditions to zero, the excitation vector in (15) can be described in the Laplace domain by
Now, a state space model for vibration control (Fig. 4)—setting the initial conditions to zero—can be used, referring to [28].

State space model for vibration control in the Laplace domain
According to [28], the output vector \(\mathbf{Y}\left(s\right)\) can now be described by
with the transfer matrix \({\mathbf{G}}_{\mathrm{e}}\left(s\right)\):
where \({\mathbf{I}}^{\left(\mathrm{26,26}\right)}\) is the unit matrix. When using control systems, a stability analysis is essential. Therefore, the calculation of the pols is necessary, which can be done by solving the following equation [28]:
Harmonic Excitation
In this chapter, a harmonic excitation is analyzed, where the excitation vector is described complex in the time domain. With inserting
into (15), it follows:
where \({\omega }_{\mathrm{e}\varrho\upeta }\) is the excitation angular frequency and \({\widehat{\varrho }}_{\mathrm{e\eta }}\) the complex amplitude of the displacement for each single base excitation. Now, the complex vector \({\mathbf{f}}_{\mathrm{e}}^{\left(\mathrm{13,1}\right)}\left(t\right)\) is transferred into the Fourier domain:
The function \(\delta \) represents the Dirac delta function. The transfer matrix \({\mathbf{G}}_{\mathrm{e}}^{\left(\mathrm{39,13}\right)}\left(s\right)\) in (34) is transferred into the Fourier domain, which represents the frequency response matrix \({\mathbf{G}}_{\mathrm{e}}^{\left(\mathrm{39,13}\right)}\left(j\omega \right)\):
The Fourier-transformed output vector \(\mathbf{Y}(j\omega )\) can now be calculated by
With the shifting property of the Dirac delta functions \(\delta \left(\omega -{\omega }_{\mathrm{e}\varrho\upeta }\right)\), the output vector becomes
When transforming this vector back into the time domain, it follows:
where the complex amplitude vector \({\widehat{{\varvec{y}}}}_{\mathrm{e}\varrho\upeta }^{\left(\mathrm{39,1}\right)}\) of the output vector, caused by a single base excitation, is described by
with
Now, the calculation of the actuator forces can be deduced. Based on (25) and (26), the actuator forces for each machine side can be described in the Fourier domain for harmonic excitation by
Based on (42), the coordinates \({z}_{\mathrm{s}}\left(t\right)\), \({\varphi }_{s}\left(t\right)\), \({z}_{\mathrm{fL}}\left(t\right)\) and \({z}_{\mathrm{fR}}\left(t\right)\) can be described in the time domain:
The complex amplitudes \({\widehat{z}}_{\mathrm{s},\mathrm{e}\varrho\upeta }\), \({\widehat{\varphi }}_{\mathrm{s},\mathrm{e}\varrho\upeta }\), \({\widehat{z}}_{\mathrm{fL},\mathrm{e}\varrho\upeta }\) and \({\widehat{z}}_{\mathrm{fR},\mathrm{e}\varrho\upeta }\) can be taken from the vector \({\widehat{{\varvec{y}}}}_{\mathrm{e}\varrho\upeta }\) in (43). When transferring the formulas (47) into the Fourier domain, it follows:
When inserting Eqs. (48) into (45) and (46) and using again the sifting property of the Dirac delta function \(\delta \left(\omega -{\omega }_{\mathrm{e}\varrho\upeta }\right)\), it follows:
When transforming these two actuator forces again back into the time domain, the actuator forces for each machine side in the time domain can be described by
Actuator forces on the left side of the machine:
Actuator forces on the right side of the machine:
Numerical Example
In this section, a rotating machine with roller bearings is analyzed for different cases (Table 1).
Boundary Condition
Boundary conditions of the rotating machine, actuators and foundation
The basic data of the rotating machine, actuators and foundation are described in Table 2.
According to Fig. 2, the damping coefficients of the foundation and of the actuators at each machine side for cases 2, 3 and 4 are calculated simplified—referring to [3] and [29]—by
and the damping coefficients of the foundation for case 1 are calculated simplified by
Controller Design
The aim of the controller design is to increase the damping of the vibration system. Therefore, the controlled actuator forces \({f}_{\mathrm{az\eta },\mathrm{cont}}\left(t\right)\) should have mainly damping characteristic regarding the vibration system in the interesting frequency range. The transfer path from vertical accelerations of top plates of the actuators to the controlled actuator forces for each machine side is pictured in Fig. 5 and also mathematically described in (23).

Transfer path from vertical accelerations of the top plates of the actuators to the controlled actuator forces, for each machine side
To achieve a pure damping characteristic of the controlled actuator forces, independent of the frequency range, the transfer function \({G}_{{\mathrm{F}}_{\mathrm{a},\mathrm{cont},\upeta }/{\mathrm{A}}_{\mathrm{za\eta }}}\left(s\right)={F}_{\mathrm{a},\mathrm{cont},\upeta }\left(s\right)/{A}_{\mathrm{za\eta }}\left(s\right)\) should have the following integral characteristic:
In this case, the controller transfer function has to be
leading to the following transfer function \({G}_{{\mathrm{F}}_{\mathrm{a},\mathrm{cont},\upeta }/{\mathrm{A}}_{\mathrm{za\eta }}}\left(s\right)\):
However, this is only possible in a theoretical analysis. If constant components exists in the acceleration signals of the top plates of the actuators—e.g., due to measurement noise—which always occurs in practice, the pure integral characteristic would lead to stability problems. Referring to [23, 36] and [37], a low pass controller, which represents a PT1 element with the gain \({K}_{\mathrm{ck\eta }}\) and the corner angular frequency \({\omega }_{\mathrm{LPk\eta }}\), is used to avoid this kind of instability, in combination with a high pass filter with the corner angular frequency \({\omega }_{\mathrm{HPk\eta }}\) to avoid constant components in the voltage. In this paper now, a third term \((s\cdot {L}_{\mathrm{k\eta }}+{R}_{\mathrm{k\eta }})\) is used in the controller transfer function to compensate the actuator dynamics, avoiding phase decrease of the controlled actuator forces for higher frequencies. Therefore, the controller transfer function now becomes:
With this controller transfer function \({G}_{\mathrm{ck\eta }}\left(s\right)\), the transfer function \({G}_{{\mathrm{F}}_{\mathrm{a},\mathrm{cont},\upeta }/{\mathrm{A}}_{\mathrm{za\eta }}}\left(s\right)\) becomes:
Without compensation of the actuator dynamics, the controller transfer function would be
leading to the following transfer function:
The data of the analyzed controllers are described in Table 3. Identical controllers are used on the right side and on the left side of the machine.
The frequency responses, with the vertical accelerations of top plates of the actuators \({A}_{\mathrm{za\eta }}\left(j\omega \right)\) as input and the controlled actuator forces \({F}_{\mathrm{a},\mathrm{cont},\upeta }\left(j\omega \right)\) as output, are pictured in Fig. 6, for the different controllers. Figure 6 shows that the amplitude response of the “ideal controller” (red dashed line) is nearly identical to the amplitude response for the “low pass controller with high pass filter and compensation of actuator dynamics” (green line) in the range between 0.4 and 1000 Hz. The amplitude response for the “low pass controller with high pass filter without compensation of actuator dynamics” (black dashed line) differs clearly, but has nearly the same gradient between 0.4 and 100 Hz. For the discussion regarding the damping characteristic of the actuator forces, the phase response is more suitable.

Frequency responses—input signal Azaη(jω) and output signal Fa,cont,η(jω)—with the three different controllers (reference value for the amplitude: GFa,cont,η/Azaη,ref = 1 Ns2/m)
Figure 6 shows that with the “ideal controller” (red dashed line), the controlled actuator forces show pure damping characteristics, because the phase angle of the phase response is 90°, independent of the frequency range. When using the “low pass controller with the high pass filter” but without compensation of the actuator dynamics (black dashed line), the controlled actuator forces show only a well damping character between 1 and 40 Hz. However, above 40 Hz, the actuator forces lose clearly their damping character with increasing frequency, due to the decreasing phase angle. When adding now compensation of the actuator dynamics (green line), the decrease in the phase angle can be avoided, so that the controlled actuator forces show well damping character in the whole interesting frequency range (1 Hz—100 Hz). Therefore, the low pass controller with high pass filter and with actuator compensation (58) is used for further analysis, with the controller parameters in Table 4.
Natural Vibration Analysis
In this section, the natural vibrations are analyzed for the four different cases. Due to the level of detail of the used model, only the first five natural vibrations are considered. In Fig. 7, the corresponding poles of the system for the different cases are pictured.

Analyzed poles of the system for the different cases
Figure 7 shows that for all four cases, stable operation exists, because all poles have negative real parts. The poles of case 1 (“directly mounted”) and case 2 (“full passive”) differ clearly, due to the additional elasticity of the actuators in case 2, leading to lower natural frequencies, which can also be seen in Table 5. With connected actuator terminals—case 3 (“without control”)—the imaginary parts of the poles differ only marginal from the poles of case 2. The actuator forces \({f}_{\mathrm{az\eta },\mathrm{disp}}\left(t\right)\), which occur now for case 3, increase the damping, and shift the poles of mode 1, 2, 3 and 5 slightly to the left. However, the natural frequencies stay nearly the same (Table 5). The influence on mode 4 is neglectable. If now the system is operated in case 4 (“with control”), both kinds of actuator forces \({f}_{\mathrm{az\eta },\mathrm{disp}}\left(t\right)\) and \({f}_{\mathrm{az\eta },\mathrm{cont}}\left(t\right)\) occur, and the damping of four out of five conjugate complex poles can be clearly increased, and the poles are shifted strongly to the left. Also, the natural frequencies of these natural vibrations are influenced, but only slightly (Table 5). The natural vibration mode 4 of case 2 (Fig. 8) is hardly influenced by the actuator forces, because only marginal vertical machine feet vibrations occur in this mode shape. Therefore, this mode will hardly be influenced by the control system.

First five natural vibration modes for case 1 and case 2
The mode shapes of the first five natural vibrations for case 1 and case 2 are pictured in Fig. 8.
Frequency Response Analysis
In this section, different frequency response analyses are deduced. The amplitude of the vibration velocity of each single base excitation at each machine side is used as separate input and the amplitudes of the bearing housing vibration velocities and the amplitudes of the actuator forces as outputs. Also, the amplitudes of the combined excitation on the left side and on the right side of the machine are used as inputs and the amplitudes of the bearing housing vibration velocities and the amplitudes of the actuator forces as outputs. The investigated frequency range for the excitation is from 1 to 100 Hz.
Single Base Excitations
The frequency responses regarding the bearing housing vibrations—with the amplitude of vibration velocity of each single base excitation \({\widehat{v}}_{\mathrm{e}\varrho\upeta }\) as input and the amplitudes of vertical and horizontal bearing housing vibration velocities \({\widehat{v}}_{{\mathrm{z}}_{\mathrm{b}}}\) and \({\widehat{v}}_{{\mathrm{y}}_{\mathrm{b}}}\) as outputs—can be calculated as follows:
The element \({\widehat{y}}_{\mathrm{e}\varrho\upeta }{\left(j{\omega }_{\mathrm{e}\varrho\upeta }\right)}_{n}\) is the nth element of the complex amplitude vector \({\widehat{{\varvec{y}}}}_{\mathrm{e}\varrho\upeta }^{\left(\mathrm{39,1}\right)}\) in Eq. (43). The frequency responses regarding the actuator forces—with the amplitude of vibration velocity of each single base excitation \({\widehat{v}}_{\mathrm{e}\varrho\upeta }\) as input and the amplitudes of the actuator forces on the left side and on the right side of the machine as outputs—can be described as follows.
For the left side of the machine,
For the right side of the machine,
When analyzing the amplitude response function in \(\left[\mathrm{dB}\right]\), the following definitions have to be considered:
– Amplitude response functions, regarding the bearing housing vibrations:
– Amplitude response functions, regarding actuator forces:
Additionally, also the phase responses, regarding the actuator forces, are analyzed. The amplitude response functions regarding the bearing housing vibrations with a single base excitation are pictured in Fig. 9. The amplitude response functions, with horizontal base vibration velocity on the left or right side of the machine as input and with vertical bearing housing vibration velocity as output, are not pictured, because no vertical bearing housing vibrations occur for excitation with horizontal base excitations. Figure 9a, b shows that for case 1 (“directly mounted”), three resonances—at 16.8 Hz, 50.1 Hz and 70.2 Hz—occur regarding horizontal bearing housing vibrations, which correspond to the natural vibrations of modes 1, 3 and 4 of case 1 in Fig. 8. Regarding vertical bearing housing vibrations, two resonances—at 28,1 Hz and 70.5 Hz—occur (Fig. 9c), which corresponds to the natural vibrations in mode 2 and 5 of case 1 in Fig. 8. When now actuators are mounted between steel frame foundation and machine feet and case 2 (“full passive”) is investigated, the horizontal bearing housing resonance frequencies drop down to 6.2 Hz, 19.4 Hz and 68.7 Hz, and the vertical bearing housing resonance frequencies to 9.9 Hz and 68.7 Hz. All these resonance frequencies correspond to the natural vibrations frequencies in Fig. 8, case 2. When now case 3 (“without control”) is considered, which means that only actuator forces \({f}_{\mathrm{az\eta },\mathrm{disp}}\left(t\right)\) due to motion-induced voltage occur, it can be seen in Fig. 9 that the resonance frequencies are hardly influenced when compared to case 2. However, a clear damping is obvious in zoom 1 and 2 in Fig. 9a, b and in the zoom 1 and 4 in Fig. 9c, leading to a reduction of the amplitudes between -1 dB (zoom 2 in Fig. 9b) to − 2.7 dB (zoom 1 in Fig. 9c) in these four resonances, compared to case 2. Only the resonance, which corresponds to mode 4 (case 2) in Fig. 8, cannot be damped (zoom 3 in Fig. 9a, b).

Amplitude response functions, regarding bearing housing vibrations for single base excitation—input: base vibration velocity on the left or right side of the machine; output: bearing housing vibration velocity—for the different cases
With active vibration control (case 4: “with control”), these four resonances can now be strongly damped, leading to a further reduction of the amplitudes (between − 15 dB and − 27 dB), compared to case 3. Again, the resonance which corresponds to mode 4 (case 2) in Fig. 8, cannot be damped, neither with active vibration control. The reason is that mode 4 (case 2) in Fig. 8 has only marginal vertical movements of the machine feet, compared to the horizontal machine feet movements. Therefore, this vibration mode will hardly be influenced by the control system. The amplitude and phase response functions, regarding actuator forces for separate base excitation—\({f}_{\mathrm{az\eta }}\left(t\right)\) separated into \({f}_{\mathrm{az\eta },\mathrm{disp}}\left(t\right)\) and \({f}_{\mathrm{az\eta },\mathrm{cont}}\left(t\right)\)—for case 4, are pictured in Fig. 10. It can be clearly seen that \({f}_{\mathrm{az\eta },\mathrm{cont}}\left(t\right)\) is mostly dominating compared to \({f}_{\mathrm{az\eta },\mathrm{disp}}\left(t\right)\). Only for the conditions in Fig. 10b, the actuator forces \({f}_{\mathrm{az\eta },\mathrm{disp}}\left(t\right)\) gain in importance for higher frequencies.

Amplitude and phase response functions, regarding actuator forces for single base excitation—input: base vibration velocity on the left side of the machine and output: actuator forces—for case 4
Combined Base Excitations
The frequency responses regarding the bearing housing vibrations, with the amplitude of vibration velocity for combined (identical) base excitation on the left side and on the right side with
-
Identical amplitudes: \({\widehat{v}}_{\mathrm{e}\varrho \mathrm{LR}}={\widehat{v}}_{\mathrm{e}\varrho \mathrm{L}}={\widehat{v}}_{\mathrm{e}\varrho \mathrm{R}}\);
-
Identical excitation angular frequencies:\({\omega }_{\mathrm{e}\varrho \mathrm{LR}}={\omega }_{\mathrm{e}\varrho \mathrm{L}}={\omega }_{\mathrm{e}\varrho \mathrm{R}}\);
-
Identical direction of excitation (vertical or horizontal)
as input and the amplitudes of vertical and horizontal bearing housing vibration velocities \({\widehat{v}}_{{\mathrm{z}}_{\mathrm{b}}}\) and \({\widehat{v}}_{{\mathrm{y}}_{\mathrm{b}}}\) as outputs, can be described by
The frequency responses regarding actuator forces, with the amplitude of vibration velocity for combined base excitation as input and amplitudes of the actuator forces on the left side and on the right side of the machine as outputs, can be described as follows:
For the left side of the machine:
For the right side of the machine:
When analyzing the amplitude response function again in \(\mathrm{dB}\), the corresponding definitions as in Sect. 4.3.1 have to be considered.
The amplitude response functions regarding the bearing housing vibrations with a combined base excitation are pictured in Fig. 11. The amplitude response functions with a combined horizontal base vibration velocity on the left and on the right side of the machine as input and with vertical bearing housing vibration velocity as output, are not pictured, because no vertical bearing housing vibrations occur for excitation with horizontal base excitations, which is identical to Sect. 4.3.1. However, no horizontal bearing housing vibrations occur, if a combined vertical base excitation on the left and right side of the machine exists, contrarily to Sect. 4.3.1, where a single base excitation on the left or right side leads also to horizontal bearing housing vibrations (Fig. 9b). When comparing Fig. 11a with Fig. 9a, it is obvious that all curves are shifted by \(+6.02\) dB, which corresponds to a factor of 2, caused by the combined excitation on the left and right side. The same is valid, when comparing Fig. 11b with Fig. 9c.

Amplitude response functions, regarding bearing housing vibrations for combined base excitation—input: combined base vibration velocity on the left and right side of the machine and output: bearing housing vibration velocity—for the different cases
The amplitude and phase response functions, regarding actuator forces with a combined base excitation—\({f}_{\mathrm{az\eta }}\left(t\right)\) separated into \({f}_{\mathrm{az\eta },\mathrm{disp}}\left(t\right)\) and \({f}_{\mathrm{az\eta },\mathrm{cont}}\left(t\right)\)—for case 4 are pictured in Fig. 12. When comparing Fig. 12 with Fig. 10, it is obvious that for horizontal base excitation, the amplitude functions in Fig. 12a are again shifted by \(+6.02\) dB compared to Fig. 10a, but the phase responses are identical. When comparing Fig. 12b with Fig. 10b, the amplitude responses and the phase responses differ clearly. The reason is the kinematic coupling, which is described in (1), where the horizontal movements between left machine feet and right machine feet are equal, but the vertical movements may differ on the left and right side. Again, it can be clearly seen that \({f}_{\mathrm{az\eta },\mathrm{cont}}\left(t\right)\) is mostly dominating compared to \({f}_{\mathrm{az\eta },\mathrm{disp}}\left(t\right)\). Only for the conditions in Fig. 12b, the actuator forces \({f}_{\mathrm{az\eta },\mathrm{disp}}\left(t\right)\) gain in importance for higher frequencies.

Amplitude and phase response functions, regarding actuator forces for combined base excitation—input: combined base vibration velocity on the left and right side of the machine; output: actuator forces—for case 4
Validation
Also, a computational validation regarding the developed mathematical formulas was deduced. The mathematical formulations have been implemented into MATLAB-scripts—one script for calculating the poles and one script for calculating the frequency responses—and validated by using a finite element model (Fig. 13) and a block diagram in SIMULINK (Fig. 14), corresponding to the approach in [28]. The finite element model is pictured in Fig. 13. It consists of lumped masses, beam elements, spring and damping elements, and rigid connections. The base excitations are implemented as excitations forces according to formula (8). Also, the actuator forces are implemented as external forces. For simulating case 1 (“directly mounted”), the actuator stiffness is chosen very high (simulating a stiff connection) and the mass of the armatures of the actuators is changed into the foundation mass. Then, the mass of the stators of the actuators and of the original mass of the foundation—at the position pictured in Fig. 13—is chosen very low, representing pseudo-masses, avoiding zeros on the diagonal of the mass matrix.

Finite element model

Block diagram in SIMULINK
With the finite element model, the mathematical formulations regarding the calculations of the poles and of the frequency responses for case 1 and case 2 could be validated. For validating the mathematical formulations regarding case 3 and case 4, a block diagram in SIMULINK was used, which is pictured in Fig. 14. The blocks for the excitations are marked green, and the two state space blocks—state space block for case 1 and state space block for case 2, 3 and 4—are marked orange. The blocks for analyzing the bearing housing vibration velocities are marked magenta, and the blocks of the controllers are marked yellow. The output vector is represented by the demux block, where the displacements, velocities, and accelerations of the coordinates are included. The machine feet accelerations (\({\ddot{z}}_{\mathrm{aL}}\) and \({\ddot{z}}_{\mathrm{aR}}\)) and are lead back, so that the actuator forces (\({f}_{\mathrm{azL},\mathrm{cont}}\) and \({f}_{\mathrm{azR},\mathrm{cont}}\)), caused by controllers, are created. The actuator forces caused by motion induced voltage (\({f}_{\mathrm{azL},\mathrm{disp}}\) and \({f}_{\mathrm{azR},\mathrm{disp}}\)) are created by leading back the differences between machine feet displacements (\({z}_{\mathrm{aL}}\) and \({z}_{\mathrm{aR}}\)) and foundation displacements (\({z}_{\mathrm{fL}}\) and \({z}_{\mathrm{fR}}\)).
With this SIMULINK block diagram, the mathematical formulations regarding the calculations of the poles and of the frequency responses for case 3 and case 4 could be validated. Finally, the calculated actuator forces—calculated with the MATLAB-scripts and SIMULINK-model (showing identical results)—were implemented into the finite element model (Fig. 13), to validate the response functions regarding the bearing housing vibrations, regarding case 3 and case 4. This computational validation was deduced for the example in the paper, which has symmetrical conditions on the left side and on the right side of the machine. However, also a computational validation was deduced for an example with unsymmetrical conditions on the left and right side of the machine.
Discussion of Limitations
The used multibody model is a 2D-model of a rotating machine, therefore limited for plane motions. Translations in the axial direction (x-axis) or rotations at the y-axis and z-axis are not considered in this model, as well as the gyroscopic effect. A simplified 3D-model is presented in [30], but with rigid rotor, bearings and bearing housings. In future, a 3D-model including the elasticity of rotor, bearings and bearing housings would be helpful. However, the complexity of the presented analytical formulations would increase significantly, which would be hardly manageable in analytical mathematical formulations. A possibility would be to export the matrices—e.g., mass matrix, damping matrix, gyroscopic matrix and stiffness matrix—from a simplified finite element model with limited number of nodes into, e.g., MATLAB/SIMULINK. Also, a modal reduction of the finite element model could be here beneficial. The vibration analysis can then be deduced in MATLAB/SIMULINK.
The controller design is chosen here in such a way that the actuator forces have mainly damping characteristic in the interesting frequency range and that the system has robust stability. However, if additional filters will be used in practice, e.g., anti-aliasing filter for digital control, the pure damping character of the actuator forces could get lost. Therefore, a similar analysis as in Sect. 4.1.2 is necessary, considering all additional transfer elements, to guarantee the damping characteristic of the actuator forces, as well as an analysis of the poles to guarantee robust stability.
Conclusion
In the paper, active vibration control of a rotating machine with voltage-driven electrodynamic actuators between machine feet and steel frame foundation under multiple base excitations is theoretically analyzed, based on a 2D multibody model. First, the mathematical coherences have been described in the time domain and then transferred into the Laplace domain, where a state space formulation was used to describe the controlled vibration system. This special kind of mathematical formulation was used, to analyze the two different kinds of actuator forces—the actuator force, caused by the motion-induced voltage and the actuator force caused by the control system—and their influence on the vibration behavior. Afterward, the formulas were transferred into the Fourier domain, for considering harmonic excitations of the base. After the mathematical formulations have been derived, a numerical example—a large rotating machine under different base excitations—was presented, where four different cases regarding machine mounting (with and without actuators) and operation (with open or closed control loops and open and connected actuator terminals) were investigated. The effectiveness of the chosen control system could be demonstrated. Finally, the derived mathematical formulations have been validated computationally by a finite element model and a SIMULINK block diagram. Limitations of the presented mathematical model have been discussed, as well as possible further developments.
References
Perez RX (2022) Maintenance, reliability and troubleshooting in rotating machinery. Wiley
Lees AW (2020) Vibration problems in machines diagnosis and resolution. CRC press, Taylor & Francis Group
Gasch R, Nordmann R, Pfützner H (2002) Rotordynamik. Springer, Berlin-Heidelberg
Genta G (2005) Dynamics of rotating systems. Springer Science & Business Media
Friswell MI, Penny JET, Garvey SD, Lees AW (2010) Dynamics of rotating machines. Cambridge University Press
Vance JM, Zeidan FY, Murphy BG (2010) Machinery vibration and rotordynamics. Wiley
Das AS, Dutt JK, Ray K (2010) Active vibration control of unbalanced flexible rotor–shaft systems parametrically excited due to base motion. Appl Math Model 34(9):2353–2369
Cole MOT, Keogh PS, Burrows CR (1998) Vibration control of a flexible rotor/magnetic bearing system subject to direct forcing and base motion disturbances. Proc Inst Mech Eng C J Mech Eng Sci 212(7):535–546
Dresig H, Holzweißig F (2010) Dynamics of machinery: theory and applications. Springer Science & Business Media
Jadhav KD, Dhanvijay MR (2012) Design and Standardization of base frame & ant vibration mounts for balanced piston air compressors. Int J Appl Res Mech Eng (IJARME) ISSN: 2231–5950, Vol-2, Iss-2
Kacani V (2017) Vibration analysis in reciprocating compressors. In: IOP Conference Series: Materials Science and Engineering, 232(1): 012016, IOP Publishing
Eberle K (2019) Reciprocating compressor foundation design with steel piles, GMRC Gas Machinery Conference
Giorgetti S, Giorgetti A, Tavafoghi Jahromi R, Arcidiacono G (2021) Machinery foundations dynamical analysis: a case study on reciprocating compressor foundation. Machines 9(10):228
Day MJ, Randall RJ, Ratcliffe CP, Rider E (1993) Reducing the vibrations caused by a marine diesel generator set. Proc Inst Mech Eng C J Mech Eng Sci 207(6):375–381
Yang T, Wu L, Li X, Zhu M, Brennan MJ, Liu Z (2020) Active vibration isolation of a diesel generator in a small marine vessel: an experimental study. Appl Sci 10(9):3025
Wang F, Weng Z, He L (2019) Comprehensive investigation on active-passive hybrid isolation and tunable dynamic vibration absorption. Springer Tracts in Mechanical Engineering. https://doi.org/10.1007/978-981-13-3056-8_2,pp19-45
Ren M, Xie X, Zhu Y, Zhang Z (2019) Investigation on a new passive/active vibration isolator. In 26th International Congress on Sound and Vibration, Montreal, QC, Canada, pp 7–11
Ulbrich H (1994) A comparison of different actuator concepts for applications in rotating machinery. Int J Rotating Mach 1(1):61–71
Fuller CR, Elliot SJ, Nelson PA (1996) Active control of vibration. Academic Press Limited
Krysinski T, Malburet T (2010) Mechanical vibrations: active and passive control. Wiley
Tokhi O, Veres S (2002) Active sound and vibration control theory and applications. Institution of electrical engineers, London
Ehmann C, Nordmann R (2012) Comparison of control strategies for active vibration control of flexible structures. Arch Control Sci 13(3):303–312
Janschek K (2012) Mechatronic systems design: methods, models. Springer, Concepts
Preumont A (2011) Vibration control of active structures: an introduction. Springer
Gomis-Bellmunt O, Campanile LF (2010) Design analysis of moving coil actuators, in: design rules for actuators in active mechanical systems. Springer, London
Paulitsch C (2005) Vibration control with electrodynamic actuators. ISVR, University of Southampton, Doctoral Thesis
Chen Y-D, Fuh C-C, Tung P-C (2005) Application of voice coil motors in active dynamic vibration Absorbers. IEEE Transactions on magnetics, 41, Nr. 3
Werner U (2023) Generalized mathematical formulation for active vibration control of rotating machines with voltage-driven electrodynamic actuators between machine feet and steel frame foundation. ZAMM-J Appl Math Mech/Zeitschrift für Angewandte Mathematik und Mechanik, WILEY-VCH,. https://doi.org/10.1002/zamm.201900126
Werner U (2022) Foundation forces caused by dynamic air gap torques of converter driven induction motors influenced by active vibration control: a theoretical analysis. Electr Eng (Archiv für Elektrotechnik), Springer, https://doi.org/10.1007/s00202-021-01454-8
Werner U (2020) 3D-model for active vibration control of rotating machines mounted on active machine foot mounts using vibration mode coupling by asymmetry. JVET- Journal of Vibration Engineering & Technologies, Springer
Fairman FW (1998) Linear control theory: the state space approach. Wily
Unbehauen H (2007) Regelungstechnik II, Zustandsregelungen, digitale und nichtlineare Regelsysteme. Vieweg
Williams II RL, Lawrence DA (2007) Linear state space control system. John Wily and Sons
Hendricks E, Jannerup O, Haase P (2008) Linear systems control: Deterministic and stochastic methods. Springer
Yedavalli RK (2014) Robust control of uncertain dynamic systems: a linear state space approach. Springer
Baur M (2015) Aktives Dämpfungssystem zur Ratterunterdrückung an spanenden Werkzeugmaschinen. vol. 290, Dissertation, Herbert Utz Verlag
Holterman J (2002) Vibration control of high-precision machines with active structural elements. Ph.D. thesis, University of Twente
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The mass matrix \({\mathbf{M}}^{\left(\mathrm{13,13}\right)}\) is described by
\({\mathbf{M}}^{\left(\mathrm{13,13}\right)}=\left[\begin{array}{cccc}{m}_{\mathrm{s}}+{m}_{\mathrm{aaR}}+{m}_{\mathrm{aaL}}& 0& 0& 0\\ 0& {m}_{\mathrm{w}}& 0& 0\\ 0& 0& {m}_{\mathrm{s}}+{m}_{\mathrm{aaR}}+{m}_{\mathrm{aaL}}& 0\\ 0& 0& 0& {m}_{\mathrm{w}}\\ {m}_{\mathrm{aaR}}\cdot {b}_{\mathrm{R}}{-m}_{\mathrm{aaL}}\cdot {b}_{\mathrm{L}}& 0& -\left({m}_{\mathrm{aaR}}+{m}_{\mathrm{aaL}}\right)\cdot h& 0\\ 0& 0& 0& 0\\ 0& 0& 0& 0\\ 0& 0& 0& 0\\ 0& 0& 0& 0\\ 0& 0& 0& 0\\ 0& 0& 0& 0\\ 0& 0& 0& 0\\ 0& 0& 0& 0\end{array}\right.\)
The damping matrix \({\mathbf{D}}^{\left(\mathrm{13,13}\right)}\) is described by
\({\mathbf{D}}^{\left(\mathrm{13,13}\right)}=\left[\begin{array}{cccc}{d}_{\mathrm{azR}}+{d}_{\mathrm{azL}}& 0& 0& 0\\ 0& 0& 0& 0\\ 0& 0& {d}_{\mathrm{ayR}}+{d}_{\mathrm{ayL}}& 0\\ 0& 0& 0& 0\\ {d}_{\mathrm{azR}}\cdot {b}_{\mathrm{R}}-{d}_{\mathrm{azL}}\cdot {b}_{\mathrm{L}}& 0& -\left({d}_{\mathrm{ayR}}+{d}_{\mathrm{ayL}}\right)\cdot h& 0\\ 0& 0& 0& 0\\ 0& 0& 0& 0\\ -{d}_{\mathrm{azL}}& 0& 0& 0\\ -{d}_{\mathrm{azR}}& 0& 0& 0\\ 0& 0& 0& 0\\ 0& 0& 0& 0\\ 0& 0& -{d}_{\mathrm{ayL}}& 0\\ 0& 0& -{d}_{\mathrm{ayR}}& 0\end{array}\right.\)
The stiffness matrix \({\mathbf{C}}^{\left(\mathrm{13,13}\right)}\) is described by
\({\mathbf{C}}^{\left(\mathrm{13,13}\right)}=\left[\begin{array}{cccc}{2c}_{\mathrm{bz}}+{c}_{\mathrm{azR}}+{c}_{\mathrm{azL}}& 0& 0& 0\\ 0& c& 0& 0\\ 0& 0& {2c}_{\mathrm{by}}+{c}_{\mathrm{ayR}}+{c}_{\mathrm{ayL}}& 0\\ 0& 0& 0& c\\ {c}_{\mathrm{azR}}\cdot {b}_{\mathrm{R}}-{c}_{\mathrm{azL}}\cdot {b}_{\mathrm{L}}& 0& -\left({\mathrm{c}}_{\mathrm{ayR}}+{c}_{\mathrm{ayL}}\right)\cdot h& 0\\ 0& -c& 0& 0\\ -2{c}_{\mathrm{bz}}& 0& 0& 0\\ -{c}_{\mathrm{azL}}& 0& 0& 0\\ -{c}_{\mathrm{azR}}& 0& 0& 0\\ 0& 0& 0& -c\\ 0& 0& -2{c}_{\mathrm{by}}& 0\\ 0& 0& -{c}_{\mathrm{ayL}}& 0\\ 0& 0& -{c}_{\mathrm{ayR}}& 0\end{array}\right.\)
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Werner, U. Active Vibration Control of a Rotating Machine with Voltage-Driven Electrodynamic Actuators Between Machine Feet and Steel Frame Foundation Under Multiple Base Excitations. J. Vib. Eng. Technol. 12, 3977–4004 (2024). https://doi.org/10.1007/s42417-023-01100-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-023-01100-6