
Abstract
When a person makes a decision, it is automatically accompanied by a subjective probability judgment of the decision being correct, in other words, a confidence judgment. A better understanding of the mechanisms responsible for these confidence judgments could provide novel insights into human behavior. However, so far confidence judgments have been mostly studied in simplistic laboratory tasks while little is known about confidence in naturalistic dynamic tasks such as driving. In this study, we made a first attempt of connecting fundamental research on confidence with naturalistic driver behavior. We investigated the confidence of drivers in left-turn gap acceptance decisions in a driver simulator experiment (N = 17). We found that confidence in these decisions depends on the size of the gap to the oncoming vehicle. Specifically, confidence increased with the gap size for trials in which the gap was accepted, and decreased with the gap size for rejected gaps. Similarly to more basic tasks, confidence was negatively related to the response times and correlated with action dynamics during decision execution. Finally, we found that confidence judgments can be captured with an extended dynamic drift–diffusion model. In the model, the drift rate of the evidence accumulator as well as the decision boundaries are functions of the gap size. Furthermore, we demonstrated that allowing for post-decision evidence accumulation in the model increases its ability to describe confidence judgments in rejected gap decisions. Overall, our study confirmed that principles known from fundamental confidence research extend to confidence judgments in dynamic decisions during a naturalistic task.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Our decisions are automatically accompanied by a confidence judgment which is one’s subjectively estimated probability that their decision is correct (Fetsch et al., 2014; Kepecs & Mainen, 2012; Yeung & Summerfield, 2012). Previous research has demonstrated that the processes responsible for decision making and confidence judgments are closely related to each other (Kepecs & Mainen, 2012; Kiani & Shadlen, 2009; Murphy et al., 2015; Yeung & Summerfield, 2012). Confidence judgments affect for example the justifications of future decisions and behavior (Folke et al., 2017). Moreover, the processes responsible for decision making (Ratcliff & McKoon, 2008) and confidence judgments are both dependent on the accumulation of evidence towards or against a decision (Desender et al., 2022; Fleming & Daw, 2017; De Martino et al., 2013; Murphy et al., 2015; Pleskac & Busemeyer, 2010; Yeung & Summerfield, 2012).
Earlier experimental studies and confidence models provided many insights into confidence judgments. In particular, two of the most robust findings in confidence research is that confidence in a decision increases with the strength of evidence in favor of the chosen option and that confidence correlates negatively with response time (Fleming, 2023; Kiani et al., 2014; Rahnev et al., 2020; Yeung & Summerfield, 2012). However, these findings have been replicated in traditional laboratory setups with simplistic preferential (Brus et al., 2021; De Martino et al., 2013), inferential (Chua & Solinger, 2015; Händel, et al., 2020; Liberman, 2004), or perceptual tasks (Kiani et al., 2014; Rouault et al., 2019). At the same time, it is unclear if the empirical findings and computational models of confidence in simple tasks generalize to naturalistic, real-life decisions which typically involve complex task structure and dynamically changing perceptual information (Fleming, 2023).
One domain in which human decisions are inherently dynamic is traffic: human drivers and pedestrians make safety–critical decisions in complex dynamic scenes on a daily basis. An example of a safety–critical decision which could cause a conflict between road users is the left turn gap acceptance decision, in which a driver must decide if there is enough space and time to make a left turn in front of an oncoming vehicle. A significant proportion of accidents are collisions during the execution of left turns, which often result in injuries (Larsen & Kines, 2002; Wang & Abdel-Aty, 2007). Drivers thus have difficulties with left turn gap acceptance decisions, this could be due to lack of attention or to incorrect estimation of the time-to-arrival of the oncoming vehicle (Larsen & Kines, 2002). Recent research has examined the cognitive mechanisms behind the decision-making processes underlying traffic decisions, revealing that evidence accumulation models can explain decisions and response times observed in a variety of tasks such as pedestrian crossing (Markkula et al., 2023; Pekkanen et al., 2022), left-turn maneuvers (Zgonnikov et al., 2022, 2024), and overtaking (Mohammad et al., 2023).
Despite much research into cognitive process modeling of driving tasks (including not only decision making in but also cognitive workload and multitasking (Castro et al., 2019; Ratcliff & Strayer, 2014; Tillman et al., 2017), human confidence judgments during such tasks received undeservedly little attention. In the context of lane-change decisions, driver uncertainty judgments (defined as “driver’s difficulty to make appropriate decisions of either changing the lane or not in a given lane change situation”) have been shown to depend on kinematics of vehicles in the traffic scene (Yan et al., 2015, 2023). Uncertainty judgments have also been investigated in overtaking decisions (Leitner et al., 2023) and interactions at narrow passages (Miller et al., 2022). However, uncertainty judgments in traffic decisions have so far been analyzed disregarding decision outcomes, obscuring the relationship between these judgments and task parameters. Furthermore, despite the similarity of concepts, the exact relationship between (un)certainty and confidence in decision making is unclear (Pouget et al., 2016). This hampers linking recent findings on uncertainty in driving decisions to the fundamental findings and computational models of confidence.
In summary, confidence judgments in traffic decisions have not been measured yet, let alone modelled. This renders it unclear whether basic mechanisms of confidence extend to complex tasks such as driving. In addition, the lack of understanding of cognitive mechanisms underlying confidence hinders practical applications such as advanced driver assistance systems and automated vehicles, the design of which could potentially utilize the insights into drivers’ confidence.
In this study, we made a first attempt of connecting the fundamental research on confidence with studies of naturalistic human driver behavior. We investigated the confidence of human drivers in left-turn gap (the time and distance gap to the oncoming vehicle while initiating a left turn) acceptance decisions at unprotected intersections. We examined the influence of the time-to-arrival (TTA, the time it takes the oncoming vehicle to arrive to the ego vehicle assuming both vehicles move with their initial speeds) and the distance gap to the oncoming vehicle on the decisions (Research Question 1a, RQ1a) and response times (RQ1b) of drivers. Additionally, we assessed how confidence is related to the time-to-arrival and distance gap (RQ2) and how confidence is related to the response time (RQ3). Moreover, we investigated how action dynamics of drivers’ behavior after the decision relate to confidence (RQ4). Last but not least, we assessed how well confidence judgments of drivers in left-turn gap acceptance decisions can be described by four candidate cognitive models based on extended evidence accumulation models (RQ5). Specifically, we tested models using either one evidence accumulator describing both decisions (drift–diffusion model) or two independent competing evidence accumulators (race model) (Bogacz et al., 2006; Zgonnikov et al., 2022; Zylberberg et al., 2012). Also, we investigated for each model whether it performs best with or without making use of post-decision evidence accumulation (Fleming & Daw, 2017; Murphy et al., 2015).
Experiment: Methods
In this study, we investigated the confidence of drivers in left-turn gap acceptance decisions through a fixed-base driver simulator experiment (N = 17; 9 male; 8 female; mean age 31 ± (std) 11 years). The experiment followed the 2-by-2 within-subjects design. All participants were in possession of a valid driving license. The Human Research Ethic Committee of the TU Delft approved the study and participants signed an informed consent form prior to the experiment. All the data and source code used to collect and analyze the data are publicly available at https://osf.io/tgexp/.
Setup
For the driving simulation, we used the simulator software Carla (Dosovitskiy et al., 2017) on a Windowsbased desktop computer. The driver simulator hardware consisted of a 65-inch screen (Samsung UE65MU7000) and a Logitech G29 steering wheel and pedals set. Participants were seated at a distance of about 1.3 m from the screen.
Experiment Protocol
The participants were instructed to drive as they normally would, following auditory prompts which navigated them through a virtual urban area. The area consisted of a square grid of blocks (150 by 150 m each). Before each intersection, at a distance of 120 m and 30 m, navigation prompts were provided through the headphones, instructing the participant to drive straight ahead or to make a left or right turn.
Each participant drove five different randomly generated routes, with each route comprising 20 intersections. At 80% of the intersections, the participant had to make a left-turn across the path of an oncoming vehicle (Fig. 1). In the remaining intersections, participants were instructed to drive straight ahead (10%) or to make a right-turn (10%). Before entering an intersection, the participants needed to stop behind a truck that was positioned at the centre of the intersection. The truck was present in order to limit the view of the driver and to make the oncoming car appear in a natural manner. The participant’s vehicle, the truck, and the oncoming vehicle were the only vehicles in the scene, i.e. no other vehicles were behind the oncoming vehicle.

Top-down view of the left-turn gap acceptance scenario. As the truck moved away from the intersection, the oncoming vehicle appeared in participant’s field of view
To make a left turn, participants had to make a gap acceptance decision, that is, whether to accept the gap and perform the turn in front of the oncoming vehicle (“go” decision) or reject the gap and wait until the oncoming vehicle had passed (“wait” decision) (Fig. 2). Participants were asked to report their decision by pressing one of the two buttons on the steering wheel on the moment they made the decision, and to execute the turn as naturally as possible. The decision indication did not influence the traffic situation in any way, nor had effect on the oncoming vehicle and/or the participant. After the participants finished the turn (regardless of whether this was done before or after the oncoming vehicle), they were asked to self-report the level of confidence they had in their decision at the moment they pressed the button. This was the only measurement of confidence we collected.

Participants’ view at different moments throughout a trial: 1) Driving through the urban environment, 2) Stop at an intersection, whereby the front view is blocked by the truck, 3) The truck drives away, revealing the oncoming vehicle (the decision-making process starts), 4) Participant has to decide to “go” or “wait” by pressing a button on the steering wheel (the decision-making process ends; response time is recorded), 5) Execution of the turn, 6) Self-report on the confidence the participant had in the made decision by answering the question: “How confident were you in your decision? Give a rate on a scale of 1 to 5”
During the driving task, we altered the traffic situation by varying the distance gap and the time-to-arrival (TTA) of the oncoming vehicle. The distance gap and time-to-arrival were the two independent variables, taking values of 70 and 90 m and 5.5 and 6.5 s, respectively. On each route, each combination of distance and time-to-arrival was present four times in the random order. The ratio between the initial distance gap and time-to-arrival determined the velocity of the oncoming vehicle, which ranged between 38.77 km/h and 58.91 km/h and remained constant throughout the trial.
To become comfortable with the task, the participants drove at least one practice route (that is, ten intersections) before starting the experiment. We mitigated the fatigue and habituation effects by including a break halfway through the experiment and by offering the participants the opportunity to take more breaks if needed.
Data Analysis
During the experiment, we recorded the positions, velocities, and accelerations of all the vehicles (frequency: 100 Hz). We also recorded the gas throttle input of the participants’ vehicle.
Excluded Trials
In this study we only consider left-turn trials in which the indicated decision corresponded to the decision that was actually executed. We therefore excluded all changes of mind (situations in which the participant carried out a different decision than indicated), as well as the trials in which the participants did not indicate their decision (no button press). In 3.4% of all the decisions, changes of mind were present, of which in 83.9% of the cases the participant indicated a “go” decision and performed a “wait” decision. In 2.2% of all decisions, no button press was present. In 83.33% of these cases participants performed a “go” decision.
Metrics
The dependent variables in this study were the decision outcome (“go”/”wait”), the response time (RT), and the confidence. In addition, we assessed the relationship between the reported confidence and action dynamics by analyzing the velocity of the participants’ vehicle and the distance to the centre of the intersection while executing the turn.
Decision Outcome, Response Time, and Confidence
We instructed participants to report their decision as soon as they decided by pressing one of the two designated buttons on the steering wheel. We defined response time as the time between the moment the oncoming vehicle appeared in participant’s field of view and the moment one of the buttons was pressed.
We measured the level of confidence participants had in their decision by presenting them with the question “How confident were you in your decision? Give a rate on a scale of 1 to 5”. We posed the question after the turn was performed, at a distance of ten meters from the centre of the intersection, in order to minimise the interruption of the driving task. Participants had to provide the confidence judgment before they could resume the driving task.
Action Dynamics
In order to analyse how the response time and decision confidence are reflected in the subsequent driving behavior, we investigated the action dynamics (sampling rate, fs, 100 Hz) related to the execution of the turn: the velocity profile and the distance to the centre of the intersection. The velocity profile during the turn described the absolute velocity (meters/second) of the participants’ vehicle over time. In all analyses of the velocity profile, we used the initial throttle operation moment as the zero-point in time in order to negate the effect of the response time on action dynamics. As the duration of the turn execution varied strongly within and across participants, we only analyzed the velocity profiles until the cutoff point (tcutoff), defined as 0.75-percentile of the turn execution duration (calculated separately for “go”, tcutoff = 3.24 s, and “wait” trials, tcutoff = 6.11 s).
To analyse the relation between confidence and the velocity profile, we used the following trial-level metrics: the maximum absolute velocity value during a trial, the signed average deviation from the individual mean (DMindiv, Eq. (1)), the signed average deviation from the group mean (DMgroup, Eq. (2)), and the root mean square deviation from the individual mean (RMSDindiv, Eq. (3)).
Given a velocity vector y = (y1,...,yNt) of length Nt,
The signed deviations from the mean (Eq. (1) and Eq. (2)) and the root mean square deviation (Eq. (3)) indicate how the velocity profile of a given trial deviates from the average trial. We computed the deviation from the individual mean (Eq. (1)) and root mean square deviation by comparing the velocity profile of the trial with the individual participant’s average velocity profile in all trials with the corresponding decision outcome (“go”/”wait”). At the same time, the deviation from the group mean (Eq. (2)) quantifies the difference of the velocity profile in a trial to the groupaveraged velocity profile calculated over all participants. We included mean deviations from both individual and group means to better distinguish within-participant effects from effects due to individual differences.
The main advantage of using (signed) deviations from the mean (DMindiv and DMgroup) is that they provide an indication of the extent and the direction of deviation. These metrics, however, level out positive and negative values of the deviation. The root mean square deviation prevents this, but does not provide an indication of the direction of the deviation, thereby complementing the signed average deviation metrics.
The distance to the centre of the intersection is defined as the distance (in meters) between the middle point of the ego vehicle and the centre of the intersection. When a participant made a proper turn and drove over the middle of the intersection, the distance to the center would thus be close to zero. However, in some trials participants did not make the full-turn and steered sharply to the left, and thus cut the corner, resulting in a greater distance from the center of the intersection. For the analyses of the distance to the centre of the intersection, we used the same metrics as for the velocity profile (calculated using the same alignment and cutoff time points) with the exception of using the minimum absolute value rather than the maximum value. The latter metric allowed us to capture corner-cutting behavior during the turn execution.
Statistical Analysis
We analyzed the relationships between the dependent and independent variables using mixed-effects models, using random intercepts or slopes per participant (ID) to account for between-participant differences. All statistical analysis were performed in MATLAB R2020a using the generalized linear mixed effects model fitglme and linear mixed effects model fitlme functions. In models including decision as a predictor, “go” was used as a reference class.
We used the following models for decision, response time, and confidence, respectively:
To investigate the relationship between the action dynamics metrics and confidence, we used linear mixed-effects models with the following structure:
Hypotheses
Decision Behavior and Response Times
We expected to observe a positive relation between the time-to-arrival and distance gap conditions and the probability of “go” decision (Hypothesis 1.1, H1.1), and a positive relation between the response time and the time-to-arrival (but not distance (Zgonnikov et al., 2022)) for both decisions (H1.2). These hypotheses are based on the previous studies of left-turn and overtaking gap acceptance decisions which found that the probability of accepting the gap as well as the response times are affected by the perceptual information capturing the time-to-arrival and distance gap (Sevenster et al., 2023; Zgonnikov et al., 2022, 2024).
Effect of Time-to-Arrival and Distance Gap on Confidence
Earlier research has shown that confidence judgments relate to the available perceptual evidence towards a decision, and follows the “x”-pattern: confidence increases with the strength of the evidence for decisions consistent with that evidence, and decreases with the strength of the evidence if the decision goes against the evidence (Fleming & Daw, 2017; Yeung & Summerfield, 2012). Based on this, we hypothesised that confidence positively relates to the time-to-arrival and the distance gap of the oncoming vehicle in “go” decisions, and that it negatively relates to these factors in “wait” decisions (H2.1). Intuitively, a larger time-to-arrival and distance gap give the driver more time and space to perform the left-turn in front of the oncoming vehicle, and therefore are hypothesized to result in greater confidence when the gap is accepted. However, if the driver rejects the gap despite its large size, the confidence in that decision is expected to be low.
Relationship Between Confidence and Response Time
Earlier confidence research has consistently revealed negative relationship between response times and confidence across trials: the longer participants take to make the decision, the lower their confidence is (Pleskac & Busemeyer, 2010). We therefore hypothesized that response time will be negatively related to confidence across trials (H3).
Relationship Between Confidence and Action Dynamics
Most studies of confidence have so far used paradigms that provide little data beyond decision outcomes and response times. However, more dynamic paradigms capturing continuous trajectories of decision execution are becoming increasingly popular in decision-making research, including tracking mouse cursor (Freeman, 2018; Schulte-Mecklenbeck et al., 2017), reaching (Song & Nakayama, 2009; Wispinski et al., 2020), and full body movements (Zgonnikov et al., 2019). Such paradigms have begun to unveil the link between confidence and action dynamics as expressed in hand movements (Berg et al., 2016; Dotan et al., 2018, 2019). Following these studies, we expected that confidence in our paradigm will be related to the action dynamics of turn execution. In particular, we hypothesised:
-
In “go” decisions, a positive relation between confidence on the one hand and the maximum velocity (H4.1a) and average deviation from the mean velocity (H4.2a) on the other hand. Furthermore, we hypothesised a negative relation between confidence and minimum distance to the center of the intersection (H4.1b) and average deviation from the mean distance (H4.2b). Here, we expected the participants to drive more confidently (e.g., with higher speed and following a straighter path) when executing higher-confidence “go” decisions.Footnote 1
-
A negative relation between confidence on the one hand and the root mean square deviation of the velocity profile (H4.3a) and distance to the centre of the intersection (H4.3b) on the other hand. In other words, we expected participants to deviate stronger from their typical behavior in trials where they reported lower confidence. • a weaker relation between confidence and the action dynamics measures in “wait” decisions compared to “go” decisions (H4.4). The rationale for this is that execution of the turn immediately follows the “go” decisions but is separated from “wait” decisions by several seconds of inaction.
Experiment: Results
Decision Behavior and Response Times
We found that the drivers’ decision behavior (Fig. 3, Table 1) and response times (Fig. 4A, Table 2) were influenced by the time-to-arrival and distance gap of the oncoming vehicle.

Group-averaged (solid lines) and individual participants’ (dashed lines) probabilities of “go” decision as a function of the time-to-arrival and distance gap to the oncoming vehicle. Error bars represent 95% CI over n = 17 individual participants’ mean values

Group-averaged and individual mean A) response times, and B) confidence judgments for the two decision outcomes (“go”/”wait”) depending on the time-to-arrival and distance gap to the oncoming vehicle. Error bars represent 95% CI over n = 17 individual participants’ mean values
As expected (H1.1), we found that probability of making a “go” decision increased with time-to-arrival (t = 9.2, p = 1.7e-19) and distance gap (t = 19.1, p = 4.5e-73).
We did not find evidence for a difference in mean response times between “go” and “wait” decisions (b = − 0.2,p = 0.55). Response times in both “go” and “wait” decisions increased with TTA and distance gap (Fig. 4A, Table 2). For “go” decisions, response times were positively affected by the time-to-arrival (b = 0.12,t = 4.0,p = 6.5e − 05) and the distance gap (b = 0.007,t = 4.4,p = 9.9e − 06). We found no evidence that the effect of time-to-arrival was different in “wait” decisions (b = 0.013,t = 0.29,p = 0.77), but there was an additional positive effect of the distance gap on “wait” response times (b = 0.011,t = 4.6,p = 5.5e − 06) compared to “go” response times. (The detailed analyses of the mixed-effects models can be found in online supplementary information, Appendices A and B.)
We found that “go” response times we measured using button presses are moderately correlated with the response time suggested by the throttle input (r = 0.28,p = 1.6e − 15), the measure that was previously suggested as a proxy measure of “go” response times (Zgonnikov et al., 2022, 2024). However, in our data the latter often indicated deflated response times due to participants starting to press the throttle even before the could see the oncoming vehicle (see online supplementary information, Appendix C).
In short, we found that for both decision outcomes, response times were positively affected by the time-to-arrival (consistent with H1.2) as well as the distance gap (contrary to H1.2). In addition, the distance gap influenced the response time more for “wait” decisions than for “go” decisions.
Confidence
Effect of Time-to-Arrival and Distance Gap on Confidence
Our results indicate that confidence reported in “wait” decisions was significantly higher compared to “go” decisions (b = 10.3,t = 15,p = 1.6e − 48); furthermore, in both decisions confidence depended on the time-to-arrival as well as the distance gap (Table 3, Fig. 4B).
For “go” decisions, the results displayed a positive relation between confidence on the one hand and the time-to-arrival (b = 0.74,t = 12,p = 1.8e − 32) and distance gap (b = 0.034,t = 10,p = 1.85e − 23) on the other hand.
For “wait” decisions, we observed, relative to “go” decisions, a negative relation between confidence and respectively the time-to-arrival (b = − 1.1, t = − 13,p = 5.2e − 37) and the distance gap (b = − 0.04, t = − 9.3, p = 7.1e − 20). Post-hoc comparisons revealed that this relative effect resulted in negative net effect of the time-to-arrival (b = − 0.38, F = 40, p = 3.9e − 10) and distance gap (b = − 0.011, F = 9.5, p = 0.0021) on confidence in “wait” decisions. These findings indicate that the relation between confidence on the one hand and the time-to-arrival and the distance gap of the oncoming vehicle on the other is positive for “go” decisions and negative for “wait” decisions (consistent with H2.1).
Relationship Between Response Time and Confidence
We observed negative correlation between the response time and confidence (r = − 0.27, p = 1.3e − 27) across all decisions. Mixed-effects regression (Eq. 6) confirmed this negative relationship for “go” decisions (b = − 0.74, t = − 8.6, p = 2.84e − 17, see also Table 3). Furthermore, we observed no significant differences in the relationship of the response time and confidence between “go” and in “wait” decisions (b = 0.13, t = 1.3, p = 0.2). Altogether, these findings substantiate the hypothesis that response time and confidence are negatively correlated (H3).
Relationship Between Confidence and Velocity Profile
Visual inspection of group-averaged velocity profiles in “go” trials suggested that in higher-confidence trials, participants seemed to exhibit higher maximum velocities (Fig. 5A). However, statistical analyses controlling for individual differences in baseline metric values demonstrated that there was no evidence for a relationship between maximum velocity and confidence (“go” trials: b = 0.1, t = 1.2, p = 0.22; relative slope in “wait” trials: b = − 0.13, t = − 1.2, p = 0.22). Similarly, there was no evidence for a relationship between confidence and average deviation from the individual mean, as well as RMSD (see online supplementary information, Appendix E). At the same time, there was a weak positive relation between the deviation from the group mean of the velocity profile and confidence in “go” trials (b = 0.11, t = 2.2, p = 0.03), the effect that was not significantly different in “wait” trials (b = − 0.09, t = − 1.4, p = 0.16).

Group-averaged means values over time of participant’s vehicle A) velocity, and B) distance to the centre of the intersection. For visualization purposes, trials were grouped in three equal-sized bins according to the reported confidence level (within decision outcomes); each line represents 1/3 of all “go”/ “wait” trials. Shaded areas denote 95% confidence intervals. Statistical analyses of action dynamics measures (Appendix C) suggested that the observed relationship between velocity profile and confidence is due to individual differences while the relationship between the distance to the center of the intersection and confidence persisted when controlling for individual differences
Taken together, these analyses suggest no evidence for an underlying relationship between confidence and velocity profile within participants (contrary to H4.1a, H4.2a, and H4.3aFootnote 2); yet participants who were more likely to report higher confidence levels also exhibited slightly higher velocities in “go” decisions.
The latter finding, however, should be interpreted with caution, given the relatively small effect size.
Relationship Between Confidence and Distance to the Centre of the Intersection
Dynamics of mean distance over time (Fig. 5B) indicates a possible negative relation between confidence and the minimum distance to the intersection centre. Similar to the velocity profiles, this could be because higher confidence judgments are associated with more pronounced corner-cutting behavior within or across participants. Mixedeffects regression analyses confirmed a relationship between reported confidence and the distance to the centre of the intersection (see online supplementary information, Appendix E). Specifically, in “go” decisions, confidence was associated with increased corner-cutting behavior, i.e. had a negative relation with the minimum distance to intersection centre (b = − 0.17, t = − 3.9, p = 8.5e − 5) as well as with the deviation from the group mean (b = − 0.11, t = − 2.4, p = 0.015) and RMSD from the individual mean (b = − 0.07,t = − 2.7, p = 0.006), although there was no evidence for its relationship with the signed average deviation from the individual mean (b = − 0.04, t = − 1.1, p = 0.28). These effects (except for the latter one) were significantly different in “wait” decisions. Post-hoc comparisons highlighted the lack of evidence for a relationship between confidence reported in “wait” decisions and minimum distance from the centre of the intersection (b = − 0.73, F = 0.41, p = 0.52), average deviation from its group mean (b = − 0.64, F = 2.5, p = 0.12), and RMSD from the individual mean (b = 0.06, F = 1.5, p = 0.23).
Overall, our analyses of the vehicle trajectories following a decision confirmed that for “go” decisions, the minimum distance but not average distance to the intersection centre related negatively to confidence within participants (consistent with H4.1b but contrary to H4.2b). This finding hints towards more pronounced corner-cutting behavior after high-confidence “go” decisions. In addition, the results highlight increased variability in turning trajectories after lower-confidence decisions (consistent with H4.3b).
Finally, our analyses suggest that action dynamics after “wait” decisions are not related to reported confidence levels, which is in line with H4.4 that decision confidence mainly affects “go” decisions.
Cognitive Process Modelling of Confidence Judgments
To elucidate the cognitive processes underlying the response times and confidence judgments observed in our experiment, we tested four potential confidence models (Fig. 6). In this research we aim to investigate which modelling paradigm does describe and explain confidence judgements in a driving task the best. In the literature, decisions and accompanied confidence judgements are modelled by using one evidence accumulator (Yeung & Summerfield, 2012) as well as by using two competing evidence accumulators describing both potential decision outcomes (Zylberberg et al., 2012). Moreover, we investigate to what extent allowing for post-decision evidence accumulation contributes to the performance of the considered models (Fleming & Daw, 2017; Murphy et al., 2015).

Four tested confidence models derived from combining two candidate decision-making mechanisms (drift–diffusion model or race model) and two different time points of determining the confidence judgment (at the moment of making the decision or after accumulating additional evidence). CT: confidence judgment time, RT: response time
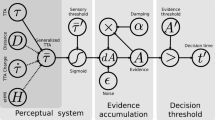
All four models considered are grounded in the evidence accumulation frame work, but differ in their assumptions about the underlying decision-making mechanism (drift-diffusion model (Ratcliff & McKoon, 2008) vs. race model (Bogacz et al., 2006)) and the confidence judgment process (post-decision accumulation vs. judgment based on evidence accumulated prior to decision).
Decision-Making Models
Both candidate decision-making models were based on a previously suggested model of left-turn gap acceptance (Zgonnikov et al., 2022). This model is a variant of the drift–diffusion model (Ratcliff & McKoon, 2008) which assumes that the decision-making process can be conceptualized as noisy evidence accumulation
where x(t) is the decision variable at time t, W is the stochastic Wiener process, and α(g(t) − θcrit) is the rate of evidence accumulation. The parameter α ≥ 0 indicated the influence of the perceptual information on the evidence accumulation process relative to the noise. The model assumed that the rate of evidence accumulation is proportional to the difference between the generalized gap g(t) between the two vehicles and the critical value of the generalised gap θcrit ≥ 0. The generalized gap g(t) was hypothesized to be a linear combination of the time-to-arrival and the distance gap to the oncoming vehicle
with β ≥ 0 characterizing the relative contribution of the distance gap relative to the time-to-arrival.
The moment in time when x reaches one of the decision boundaries (± b(t)) is defined as the response time; the upper boundary corresponds to the decision to accept the gap (“go”) and the lower boundary represents the decision to reject the gap (“wait”). The boundaries were assumed to be collapsing with the time-to-arrival of the oncoming vehicle:
where parameters b0 > 0, k ≥ 0 and τ ≥ 0 indicated respectively the boundary scale parameter, the sensitivity of the boundary to the time-to-arrival, and the characteristic time-to-arrival value at which the boundary is equal to \(\pm \frac{1}{2}{b}_{0}\) . Finally, the model accounted for possible perceptual and (motor) response delays via a normally-distributed non-decision time
with mean µND ≥ 0 and standard deviation σND ≥ 0.
In this paper, we propose two modified versions of the baseline model: the driftdiffusion model (Fig. 7A) and the race model which describes the decision-making process with two independent accumulators (Fig. 7C). Both proposed models describe the decision process with generalized gap-dependent collapsing boundaries.

Illustration of the four tested models. In each panel, the red dot indicates the decision moment (RT) and the green dot indicates the moment in time the confidence judgment is made (CT). The green arrow represents the value of the confidence variable Vc that is used for the computation of the confidence judgment (Eq. 17)
Drift–Diffusion Model
The baseline model assumed that the decision boundaries collapse with the time-toarrival, which was based on the observations of Zgonnikov et al. (Zgonnikov et al., 2022) that response time increased with time-to-arrival but not distance. In our study however, we found that response time also increased with the distance to the oncoming vehicle. In order for the model to be able to exhibit such behavior, we assumed that the decision boundary collapses not with the time-to-arrival, but with the generalized gap (which incorporates both time-to-arrival and distance gap):
where g(t) is described by Eq. (9).
Besides the decision boundary, all the other components of the baseline model were retained for the modified drift–diffusion model. This model has seven free parameters (α, β, θcrit, b0, k, µND, σND).
Race Model
The race model (Fig. 7C) included two independent competing decision variables, xgo and xwait, which are responsible for the decision outcome (Bogacz et al., 2006; Gold & Shadlen, 2007; Kiani et al., 2014). The dynamics of both decision variables are based on the same perceptual evidence (the generalized gap g(t), see Eq. (9))
Here, we assumed that the drift rate α could differ between the two accumulators while the parameters β and θcrit defining the generalized gap g(t) and its characteristic value, respectively, remain the same for the two accumulators. The reasoning underlying this assumption is that “go” decisions involve more risk and therefore could require more efficient accumulation of evidence, while the drivers’ perception of the generalised gap is likely to be independent from the decision.
In the decision boundary, the scale parameter b0 as well as the collapse rate k were also assumed to be different for “go” and “wait” accumulators
The non-decision time was assumed to be the same as in the baseline model (Eq. (11)), and was identical for the two accumulators. Overall, our race model has ten free parameters (αgo, αwait, \(\beta\), \({\theta }_{\text{crit}}\), \({b}_{0}^{\text{go}}\), \({b}_{0}^{\text{wait}}\), \({k}^{\text{go}}\), \({k}_{wait}\), µND, σND).
Confidence Models
The different confidence models were based on the two alternative accounts of how evidence accumulation is used in confidence judgments. The first account states that the amount of evidence accumulated at the time the decision is made determines the confidence judgment (Boundy-Singer et al., 2022; Kiani et al., 2014; Meyniel et al., 2015). The second account argues that confidence judgments instead invoke accumulating additional evidence post-decision (Desender et al., 2022; Murphy et al., 2015; Pleskac & Busemeyer, 2010; Yeung & Summerfield, 2012). We explored possible combinations of these two accounts of confidence judgment time with the two candidate decision models, as defined in the previous section. This resulted in four potential confidence models (Fig. 6).
The four tested confidence models shared the basic premise that the evidence accumulation process responsible for the decision-making process also plays role in confidence judgments. In all models, the confidence judgment c was hypothesized to be a linear function of the confidence variable Vc(t) evaluated at the confidence judgment time (CT)
Here, the intercept cdec0 and the sensitivity parameter \({c}_{1}^{\text{dec}}>0\) map the decision variable to the confidence rating scale (in the case of our experiment, 1 to 5). Both of these parameters depend on the decision, reflecting our finding that for “go” decisions, confidence judgments are differently biased and influenced in a different manner by perceptual information than for “wait” decisions.
The four models differed in the manner in which they queried the evidence accumulation process to determine the confidence variable Vc(t) and the moment at which the confidence variable is queried (CT).
Confidence Variable V c(t)
Models 1 and 2 were based on the drift–diffusion model and models 3 and 4 were based on the race model; the underlying decision model determined the manner in which the confidence variable Vc(t) was calculated.
The drift–diffusion model-based confidence models (model 1 and 2) had one decision variable denoting the relative evidence (Fig. 7B). These models hypothesized that the confidence variable is equal to the absolute value of this relative evidence (Vc(t) =|x(t)|), or alternatively
The race-model-based confidence models (model 3 and 4) used two accumulators, and posited that the confidence judgment depends on the value of the evidence accumulated towards the non-chosen (alternative) option (Fig. 7D). For these models, the confidence variable was defined as the negative value of the alternative evidence accumulator
Confidence Judgment Time
Models 1 and 3 assumed that the confidence judgment is made based on the values of the decision variable(s) at the time the decision is made, whereas models 2 and 4 allowed for post-decision evidence accumulation.
The models without post-decision evidence accumulation (models 1 and 3) assumed that the confidence response time is equal to the response time
This implies that the same value(s) of the evidence accumulator(s) are used for both the decision-making process and for the confidence judgment. For the drift–diffusion model, this implies that confidence relates to the value of the decision boundary at the response time. As in the underlying drift–diffusion model the decision boundary collapses with time, the confidence in model 1 depends on the response time (Kiani et al., 2014). For the race model, this is not the case as the losing accumulator defines the confidence variable Vc(t). Hence, in model 3, confidence depends on the evidence accumulated by the losing accumulator at the response time.
The models with post-decision evidence accumulation (models 2 and 4), the evidence accumulation process continues for τ > 0 s after the decision is made
As a result, the value(s) of the evidence accumulator(s) used for the decision making differ(s) from the value(s) used for confidence judgments. This means that in models 2 and 4 the confidence judgments depend on the evidence accumulated by the single accumulator (model 2) or the losing accumulator (model 4) at τ seconds after the response time.
Model Fitting
We used a two-stage approach for model fitting (see online supplementary information, Appendix F for details). First, we fitted the decision model parameters (α, β, b0, k, µND, σND, and θcrit) to the decision outcome and response time data, following the weighted least squares approach (Ratcliff & Tuerlinckx, 2002; Zgonnikov et al., 2022). Second, using the baseline decision model parameters fitted in the first stage, we fitted the confidence model parameters (sensitivity, c1 and bias, c0) using the root mean square error of model confidence outputs. For both stages of model fitting, “fmincon” function of MATLAB R2020a was used to find the best-fitting parameters.
For the confidence models that involved post-decision evidence accumulation, we did not include the parameter τ in the second model fitting stage. The reason for this was that changes in this parameter did not substantially affect model behavior (see online supplementary information, Appendix F). In both models with post-decision accumulation we hence used τ = 1 s as inter-judgment time. To put things in perspective, the average duration of making the turn (time between the first moment of seeing the oncoming vehicle and giving the confidence judgment) was 3.06 s (SD = 0.498) for “go” decisions and 6.26 s (SD = 1.092) for “wait” decisions.
Results
We found that both the DDM and the race model had similar performance in fitting the experimentally observed decisions and response times (Fig. 8, Table 4). The race model performed slightly better in terms of WLS, although this should be taken with caution given a larger number of free parameters in this model (10 in race model vs 7 in DDM).

Decision outcomes (A, C) and response times (B, D) produced by the drift–diffusion model (A, B) and the race model (C, D). Error bars: 95% CI
The fitted parameters of the race model show that the drift rate α was slightly higher for the “go” accumulator, as compared to the “wait” accumulator. Conversely, the baseline boundary b0 was higher for the “wait” accumulator compared to “go”, indicating that a larger amount of evidence needed to be accumulated to make a “wait” decision. Finally, the decision boundary was collapsing slightly faster (as indicated by a larger value of parameter k) for the “wait” accumulator, as compared to the “go” accumulator.
Fitting of two candidate confidence models for each baseline decision models demonstrated that experimentally observed confidence ratings were more consistent with ratings produced after additional evidence accumulation rather than ratings measured at the time of the decision (Fig. 9, Table 5). The additional evidence accumulation in particular improved the ability of the models to capture confidence judgments in “wait” decisions, for both the race model as well as the DDM.

Confidence judgments produced by the four candidate models
This finding substantiates the account of confidence judgments being based on post-decision evidence accumulation (Fleming & Daw, 2017; Murphy et al., 2015; Yeung & Summerfield, 2012).
Furthermore, we observed that the confidence judgment process was best described using the dynamic drift–diffusion decision model (model 2). This implies that confidence judgments are better described by one evidence accumulator accounting for both decision outcomes, instead of two independent evidence accumulators for both decisions as described by the race model.
Altogether, our modelling results indicate that observed confidence judgments were most consistent with the drift–diffusion model that allows for post-decision evidence accumulation.
Discussion
Previous studies of simple perceptual and preferential tasks provided evidence that the cognitive processes responsible for decisions and confidence judgments are closely related to each other (Kepecs & Mainen, 2012; Kiani & Shadlen, 2009; Pouget et al., 2016; Zylberberg et al., 2012). However, computational underpinnings of confidence judgments in dynamic real-life tasks have remained unclear. Here we aimed to address this gap, focusing on left-turn gap acceptance decisions by human drivers.
Relation to Previous Work
Response Times in Gap Acceptance Decisions
Response time has been long established as a key metric in decision-making research, providing a basic measure of the time course of the decision-making process (Luce, 1991). We found a positive relation between response time on the one hand and the distance gap and time-to-arrival on the other hand. These findings are consistent with the previous literature that reported such positive relationships in similar decisions during left turns across path (Zgonnikov et al., 2022, 2024), overtaking (Mohammad et al., 2023; Sevenster et al., 2023), merging (Zgonnikov et al., 2023), and lane changing (Yan et al., 2023).
Empirical Studies of Confidence
Earlier studies of confidence in simple perceptual decisions have universally reported that a higher quality as well as a higher quantity of evidence towards a chosen option result in higher confidence judgments (Kiani et al., 2014; Murphy et al., 2015; Yeung & Summerfield, 2012). In the context of our task, this means that for example, the combination of a large time-to-arrival and a large distance gap should result in higher-confidence “go” decisions than e.g. a combination of a large time-to-arrival and a small distance gap. The results confirmed that in conditions with larger time-to-arrival and distance to the oncoming vehicle, participants reported higher confidence in “go” decisions and lower confidence in “wait” decisions.
This corresponds to the commonly observed “folded X-pattern” in perceptual decisions (Drugowitsch, 2016; Kepecs & Mainen, 2012; Sanders et al., 2016). Furthermore, the negative relation we found between confidence and response time is also in accordance with earlier confidence research, which argued that less (qualitative) evidence towards a decision results in a longer duration of evidence accumulation before making a decision, which results in a reduced amount of confidence (Kiani et al., 2014; Pleskac & Busemeyer, 2010). Our findings thus connect the domain of driver decision making to previous findings in the basic empirical literature on confidence.
Among the existing applied work on driver decision making, the studies most related to this paper are the ones that studied drivers’ certainty (or, alternatively, uncertainty) in gap acceptance decisions in lane changes (Yan et al., 2015, 2016, 2023), narrow passages (Miller et al., 2022), and overtaking (Leitner et al., 2023). While closely related, the concepts of confidence and certainty are however fundamentally distinct, with known dissociations between them (Peterson & Pitz, 1988; Pouget et al., 2016). Our findings are generally consistent with the patterns of certainty judgments observed in previous studies of driver behavior (Leitner et al., 2023; Miller et al., 2022; Yan et al., 2015, 2016, 2023), although the manner in which (un)certainty is analyzed in the literature complicates a direct comparison. Specifically, in this line of research, (un)certainty has been analyzed as a function of kinematic variables (such as TTA) disregarding the decision outcome. This obscures the functional relationship between the evidence in a given option and the (un)certainty judgments in decisions in favor of that option: “the key property of confidence is that it is choice dependent” (Pouget et al., 2016). By addressing this issue, as well as testing specifically for dissociations previously reported for perceptual decisions (Peterson & Pitz, 1988), future work can clarify the relationship between certainty and confidence in driver decision making.
The main focus of this work is on subjective confidence reports, which continue to be a cornerstone of the fundamental literature on confidence. More recently, post-decision response trajectories have been suggested as a alternative measure of confidence (Berg et al., 2016; Dotan et al., 2018). These trajectories could hypothetically provide a less intrusive and more dynamic alternative to traditional confidence measures. However, existing studies on the relationship between confidence and action dynamics have relied on highly specialized tasks that were specifically designed to probe this relationship. Our driving task offered us a unique opportunity to investigate how confidence relates to postdecision action dynamics (namely, vehicle trajectories) in a naturalistic setting. We found evidence for a relationship between confidence and some of the action dynamics measures (e.g., corner-cutting behavior) but not others (e.g., velocity). This suggests that potential “leakage” of confidence into post-decision behavior in naturalistic driver behavior is real but nuanced; follow-up studies measuring both subjective confidence reports and full driving trajectories in other driving tasks can further illuminate this relationship.
Cognitive Process Modelling of Confidence Judgments
We showed that the cognitive process responsible for confidence judgments can be modelled with the same evidence accumulator that is used to model the decisionmaking process when accounting for additional evidence accumulation. In order to translate the present evidence expressed by the evidence accumulator into a confidence judgment, we defined two additional confidence model parameters that describe the sensitivity towards the present evidence and the confidence bias. These additional model parameters can potentially be related to the two main factors that determine someone’s metacognitive ability: the metacognitive sensitivity representing the reliability or accuracy, and the metacognitive bias which can be described as the calibration (Fleming & Lau, 2014). This can be used to explain the observed differences between individuals, something that may be of interest for future research.
Our modelling results are consistent with previous research by Zylberberg et al. (Zylberberg et al., 2012) who found that post-decision confidence is more strongly affected by positive evidence in favour of the made decision than by the negative evidence in favour of the alternative decision in a simple perceptual task. More generally, our results contribute to the body of evidence that implicate post-decision evidence accumulation as a mechanism contributing to confidence judgments (Hellmann et al., 2023; Pleskac & Busemeyer, 2010; Yeung & Summerfield, 2012). We tested four candidate models, each of which was adapted from previous research; in that sense, our study did not yield any insights into previously unknown confidence mechanisms. Instead, our original contribution lies in evaluating the basic computational accounts of confidence in a close-to-real-life driving setting (something that hasn’t been addressed in driver behavior literature so far). At the same time, more intricate models have recently been proposed which are yet to be tested in such settings (Atiya et al., 2019; Fleming & Daw, 2017; Hellmann et al., 2023); we see this as yet another important direction for future work.
Limitations
One of the key trade-offs in our experiment design was the decision reporting procedure. In our study, we used an explicit decision reporting procedure (participants were asked to press a button when the decision was made). This allowed us to measure response times in “wait” decisions and model the decision process as a two-choice task rather than one-choice task (Ratcliff & Van Dongen, 2011). The downside of this procedure is that this could have potentially broken down the decision process in two stages (first reporting the decision then executing it), possibly affecting non-decision times. To prevent this, we instructed the participants to report the decision while driving and allowed them to get used to this procedure during practice trials. As a result, the decision execution was minimally affected by the requirement to press the button to report the decision.
Moreover, we measured confidence in this study with post-decision self-reports. The main advantage of using a self-report-based measurement method is that confidence judgments are directly measured (Kepecs & Mainen, 2012). However, the disadvantage of this method, which has not been taken into account in this study, is that measurement errors and strategic biases can cause distortion in the measurement (Kepecs & Mainen, 2012). For example, participants may not be willing to give an honest confidence judgment because of perceived expectations. Furthermore, we only measured confidence after the performance of the turn. This makes it difficult to judge whether participants’ reflection on their turn execution affected the confidence rating, despite the fact that we asked to report the confidence they initially had when making the the decision. We opted for using post-turn confidence judgements to be able to investigate the relation between driving behavior and confidence. Alternatively, if confidence was reported immediately after the decision, the task would be disrupted too much, preventing us from investigating driving behavior during the turn.
Our modelling results suggest that participants were not able to do so, showing that confidence judgments were best explained when taking into account additional evidence accumulation. In other words, participants continued evidence accumulation after the decision was made which affected their retrospective confidence judgment. Further research could make a comparison between self-reported confidence at the decision response time and self-reported confidence at the end of the turn to provide further insight on this issue.
The results of this study demonstrated that the confidence of a driver in leftturn gap accepting decisions is affected by the time-to-arrival and distance gap of the oncoming vehicle, besides individual differences. We made use of the aggregate data for the regression analysis and allowed for individual differences with random intercepts. However, we did not investigate or account for the causes of these individual differences in our cognitive modelling, as the number of recorded decisions per participant was not sufficient for individual parameter fitting. Earlier research has shown that individual differences can be caused by differences in self-concept, the level of metacognitive skills, the level of skills and (the amount of) experience (Chua & Solinger, 2015; Händel et al., 2020; Kruger & Dunning, 1999).
For the reason of simplicity, we assumed in our post-decision evidence accumulation confidence models that the drift rate remains the same after the decision has been made. However, it can be questioned to what extent this assumption is true. For instance, one may argue that the contribution of new perceptual evidence reduces after the decision is made, especially in “go” decisions because the driver does not observe the relevant perceptual information anymore. Follow-up research could explore how the evidence accumulation after the decision has been made can best be described.
Lastly, the two-stage model fitting approach we adopted rested on the assumption that the decision-making and confidence-judgment parts of the model are independent from each other, and therefore could be fitted to the data in a sequential manner. This allowed us to perform model fitting in time-efficient way, but has a risk of missing model parameter combinations which might not necessarily stem from the best-fit decision model yet provide a better fit to the overall data. This limitation could be addressed in future by fitting the models to decision outcome, response times, and confidence data simultaneously.
Implications
Better understanding of human cognition can lead to better human–machine interaction (Flemisch et al., 2008; Schürmann & Beckerle, 2020) and contribute to safe and efficient intelligent transportation systems (Markkula et al., 2018). We believe that our findings in particular can help improve driver assistance systems and automated vehicles which could utilize the insight into driver confidence for more personalized automation (Yan et al., 2016, 2017), which in turn can help improve road safety. More fundamentally, our study exemplifies how real-world tasks can be translated into controlled experimental paradigms, providing a new kind of testbed for theories and models developed in basic science using distilled tasks (Boag et al., 2023; Maselli et al., 2023). We believe such cross-pollination between fundamental cognitive science and real-world behavior will both enrich theoretical developments and enable new applications.
Conclusions
The study addressed the relation between confidence and the time-to-arrival and distance gap of the oncoming vehicle, the decision response time, and the action dynamics of the performed turn. We investigated to what extent confidence judgments can be captured by four simple cognitive models which have as a premise that confidence and decisions are based on the same evidence accumulation process. We conclude that: • time-to-arrival and distance gap to the oncoming vehicle affect the confidence judgments of left-turning drivers. In particular, confidence in “go” decisions is positively related to the time-to-arrival and the distance gap. Confidence in “wait” decisions relates negatively to the time-to-arrival and distance gap.
-
Confidence relates negatively to the response time regardless of the decision outcome. • velocity profile during the turn and the distance to the centre of the intersection relate to the confidence of the participant. Participants who were more confident in their decision drove in general faster during the turn. For “go” decisions, low confidence judgments appeared to be associated with corner-cutting behavior.
-
Participants’ reported confidence in left-turn gap acceptance/rejection decisions can best be explained by an extended drift–diffusion model in which confidence judgment is based on post-decision evidence accumulation.
Data Availability
The supplementary information, all raw and processed data, and the analysis and modelling scripts are available at https://osf.io/tgexp.
Notes
Testing whether relationship between confidence and velocity profiles was weaker in “wait” decisions compared to “go” decisions (H4.4) was not meaningful due to the lack of evidence of such relationships in “go” decisions in the first place.
References
Atiya, N. A. A., Rañó, I., Prasad, G., & Wong-Lin, K. (2019). A neural circuit model of decision uncertainty and change-of-mind. Nature Communications, 10(1), 2287. https://doi.org/10.1038/s41467-019-10316-8. Accessed 2019-07-08.
Berg, R., Anandalingam, K., Zylberberg, A., Kiani, R., Shadlen, M. N., & Wolpert, D. M. (2016). A common mechanism underlies changes of mind about decisions and confidence. eLife, 5, 12192. https://doi.org/10.7554/eLife.12192. Accessed 2019-06-26.
Boag, R. J., Strickland, L., Heathcote, A., Neal, A., Palada, H., & Loft, S. (2023). Evidence accumulation modelling in the wild: Understanding safety-critical decisions. Trends in Cognitive Sciences, 27(2), 175–188. https://doi.org/10.1016/j.tics.2022.11.009. Publisher: Elsevier. Accessed 2023-12-22.
Bogacz, R., Brown, E., Moehlis, J., Holmes, P., & Cohen, J. D. (2006). The physics of optimal decision making: A formal analysis of models of performance in twoalternative forced-choice tasks. Psychological Review, 113(4), 700–765. https://doi.org/10.1037/0033-295X.113.4.700
Boundy-Singer, Z., Ziemba, C. M., & Goris, R. L. (2022). Confidence reflects a noisy decision reliability estimate. Nature Human Behaviour, 7, 142–154. https://doi.org/10.1038/s41562-022-01464-x
Brus, J., Aebersold, H., Grueschow, M., & Polania, R. (2021). Sources of confidence in value-based choice. Nature Communications, 12(1), 7337. https://doi.org/10.1038/s41467-021-27618-5. Accessed 2021-12-20.
Castro, S. C., Strayer, D. L., Matzke, D., & Heathcote, A. (2019). Cognitive workload measurement and modeling under divided attention. Journal of Experimental Psychology: Human Perception and Performance, 45, 826–839. https://doi.org/10.1037/xhp0000638
Chua, E. F., & Solinger, L. A. (2015). Building metamemorial knowledge over time: Insights from eye tracking about the bases of feeling-of-knowing and confidence judgments. Frontiers in Psychology, 6. https://doi.org/10.3389/fpsyg.2015.01206
De Martino, B., Fleming, S. M., Garrett, N., & Dolan, R. (2013). Confidence in value-based choice. Nature Neuroscience, 16(1), 105–110. https://doi.org/10.1038/nn.3279. Accessed 2023-10-09.
Desender, K., Vermeylen, L., & Verguts, T. (2022). Dynamic influences on static measures of metacognition. Nature Communications. https://doi.org/10.1038/s41467-022-31727
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., & Koltun, V. (2017). CARLA: An open urban driving simulator. In Proceedings of the 1st Annual Conference on Robot Learning (pp. 1–16). https://proceedings.mlr.press/v78/dosovitskiy17a.html. Accessed 2022-10-01.
Dotan, D., Meyniel, F., & Dehaene, S. (2018). On-line confidence monitoring during decision making. Cognition, 171, 112–121. https://doi.org/10.1016/j.cognition.2017.11.001
Dotan, D., Pinheiro-Chagas, P., Al Roumi, F., & Dehaene, S. (2019). Track it to crack it: Dissecting processing stages with finger tracking. Trends in Cognitive Sciences, 23(12), 1058–1070. https://doi.org/10.1016/j.tics.2019.10.002. Accessed 2023-10-10.
Drugowitsch, J. (2016). Becoming confident in the statistical nature of human confidence judgments. Neuron, 90(3), 425–427. https://doi.org/10.1016/j.neuron.2016.04.023. Accessed 2024-03-04.
Fetsch, C. R., Kiani, R., & Shadlen, M. N. (2014). Predicting the accuracy of a decision: A neural mechanism of confidence. Cold Spring Harbor Symposia on Quantitative Biology, 79, 185–197. https://doi.org/10.1101/sqb.2014.79.024893
Fleming, S. M., & Lau, H. C. (2014). How to measure metacognition. Frontiers in Human Neuroscience, 8. https://doi.org/10.3389/fnhum.2014.00443
Fleming, S. M., & Daw, N. D. (2017). Self-evaluation of decision-making: A general Bayesian framework for metacognitive computation. Psychological Review, 124. https://doi.org/10.1037/rev0000045
Fleming, S. (2023). Metacognition and confidence: A review and synthesis. PsyArXiv. https://doi.org/10.31234/osf.io/ge7tz. https://psyarxiv.com/ge7tz/. Accessed 2023–07–07.
Flemisch, F., Kelsch, J., Löper, C., Schieben, A., & Schindler, J. (2008). Automation spectrum, inner / outer compatibility and other potentially useful human factors concepts for assistance and automation. Human Factors for Assistance and Automation, 1–16. https://elib.dlr.de/57625/
Folke, T., Jacobsen, C., Fleming, S. M., & De Martino, B. (2017). Explicit representation of confidence informs future value-based decisions. Nature Human Behaviour, 1(1), 0002. https://doi.org/10.1038/s41562-016-0002. Accessed 2019-06-26.
Freeman, J. B. (2018). Doing psychological science by hand. Current Directions in Psychological Science, 27(5), 315–323. https://doi.org/10.1177/0963721417746793. Accessed 2019-06-26.
Gold, J. I., & Shadlen, M. N. (2007). The neural basis of decision making. Annual Review of Neuroscience, 30(1), 535–574. https://doi.org/10.1146/annurev.neuro.29.051605.113038. Accessed 2019-06-26.
Händel, M., Bruin, A. B. H., & Dresel, M. (2020). Individual differences in local and global metacognitive judgments. Metacognition and Learning, 15(1), 51–75. https://doi.org/10.1007/s11409-020-09220-0
Hellmann, S., Zehetleitner, M., & Rausch, M. (2023). Simultaneous modeling of choice, confidence, and response time in visual perception. Psychological Review. https://doi.org/10.1037/rev0000411. Place: US Publisher: American Psychological Association.
Kepecs, A., & Mainen, Z. F. (2012). A computational framework for the study of confidence in humans and animals. Philosophical Transactions of the Royal Society B: Biological Sciences, 367(1594), 1322–1337. https://doi.org/10.1098/rstb.2012.0037
Kiani, R., Corthell, L., & Shadlen, M. N. (2014). Choice certainty is informed by both evidence and decision time. Neuron, 84(6), 1329–1342. https://doi.org/10.1016/j.neuron.2014.12.015
Kiani, R., & Shadlen, M. N. (2009). Representation of confidence associated with a decision by neurons in the parietal cortex. Science, 324(5928), 759–764. https://doi.org/10.1126/science.1169405
Kruger, J., & Dunning, D. (1999). Unskilled and unaware of it: How difficulties in recognizing one’s own incompetence lead to inflated self-assessments. Journal of Personality and Social Psychology, 77(6), 1121.
Larsen, L., & Kines, P. (2002). Multidisciplinary in-depth investigations of head-on and leftturn road collisions. Accident Analysis & Prevention, 34, 367–380. https://doi.org/10.1016/S0001-4575(01)00034-3
Leitner, J., Miller, L., Stoll, T., & Baumann, M. (2023). Overtake or not – A computerbased driving simulation experiment on drivers’ decisions during transitions in automated driving. Transportation Research Part F: Traffic Psychology and Behaviour, 96, 285–300. https://doi.org/10.1016/j.trf.2023.06.003. Accessed 2023-10-10.
Liberman, V. (2004). Local and global judgments of confidence. Journal of Experimental Psychology: Learning, Memory, and Cognition, 30(3), 729–732. https://doi.org/10.1037/0278-7393.30.3.729
Luce, R. D. (1991). Response times: Their role in inferring elementary mental organization. Oxford University Press. https://doi.org/10.1093/acprof:oso/9780195070019.001.0001
Markkula, G., Lin, Y.-S., Srinivasan, A. R., Billington, J., Leonetti, M., Kalantari, A. H., Yang, Y., Lee, Y. M., Madigan, R., & Merat, N. (2023). Explaining human interactions on the road by large-scale integration of computational psychological theory. PNAS Nexus, 2(6), 163. https://doi.org/10.1093/pnasnexus/pgad163. Accessed 2023-07-04.
Markkula, G., Romano, R., Madigan, R., Fox, C. W., Giles, O. T., & Merat, N. (2018). Models of human decision-making as tools for estimating and optimizing impacts of vehicle automation. Transportation Research Record: Journal of the Transportation Research Board, 2672(37), 153–163. https://doi.org/10.1177/0361198118792131
Maselli, A., Gordon, J., Eluchans, M., Lancia, G. L., Thiery, T., Moretti, R., Cisek, P., & Pezzulo, G. (2023). Beyond simple laboratory studies: Developing sophisticated models to study rich behavior. Physics of Life Reviews, 46, 220–244. https://doi.org/10.1016/j.plrev.2023.07.006. Accessed 2023-07-30.
Meyniel, F., Schlunegger, D., & Dehaene, S. (2015). The sense of confidence during probabilistic learning: A normative account. PLoS Computational Biology, 11(6). https://doi.org/10.1371/journal.pcbi.1004305
Miller, L., Leitner, J., Kraus, J., Lee, J., Daimon, T., Kitazaki, S., & Baumann, M. (2022). Time to arrival as predictor for uncertainty and cooperative driving decisions in highly automated driving. In 2022 IEEE Intelligent Vehicles Symposium (IV) (pp. 1048–1053). https://doi.org/10.1109/IV51971.2022.9827416
Mohammad, S. H. A., Farah, H., & Zgonnikov, A. (2023). Modeling gap acceptance in overtaking: A cognitive process approach. In 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC) (pp. 5925–5931). https://doi.org/10.1109/ITSC57777.2023.10422576 . ISSN: 2153–0017. https://ieeexplore.ieee.org/abstract/document/10422576. Accessed 2024–03–01.
Murphy, P. R., Robertson, I. H., Harty, S., & O’Connell, R.G. (2015). Neural evidence accumulation persists after choice to inform metacognitive judgments. eLife, 4. https://doi.org/10.7554/eLife.11946
Pekkanen, J., Giles, O. T., Lee, Y. M., Madigan, R., Daimon, T., Merat, N., & Markkula, G. (2022). Variable-drift diffusion models of pedestrian road-crossing decisions. Computational Brain & Behavior, 5(1), 60–80. https://doi.org/10.1007/s42113-021-00116-z
Peterson, D. K., & Pitz, G. F. (1988). Confidence, uncertainty, and the use of information. Journal of Experimental Psychology: Learning, Memory, and Cognition, 14(1), 85–92. https://doi.org/10.1037/0278-7393.14.1.85. Place: US Publisher: American Psychological Association.
Pleskac, T. J., & Busemeyer, J. R. (2010). Two-stage dynamic signal detection: A theory of choice, decision time, and confidence. Psychological Review, 117(3), 864–901. https://doi.org/10.1037/a0019737
Pouget, A., Drugowitsch, J., & Kepecs, A. (2016). Confidence and certainty: Distinct probabilistic quantities for different goals. Nature Neuroscience, 19(3), 366–374. https://doi.org/10.1038/nn.4240. Publisher: Nature Publishing Group US New York.
Rahnev, D., Desender, K., Lee, A. L. F., Adler, W. T., Aguilar-Lleyda, D., Akdoğan, B., Arbuzova, P., Atlas, L. Y., Balcı, F., Bang, J. W., Bègue, I., Birney, D. P., Brady, T. F., Calder-Travis, J., Chetverikov, A., Clark, T. K., Davranche, K., Denison, R. N., Dildine, T. C., … Zylberberg, A. (2020). The confidence database. Nature Human Behaviour, 4(3), 317–325. https://doi.org/10.1038/s41562-019-0813-1. Accessed 2023-03-26.
Ratcliff, R., & Van Dongen, H. P. A. (2011). Diffusion model for one-choice reaction-time tasks and the cognitive effects of sleep deprivation. PNAS Proceedings of the National Academy of Sciences of the United States of America, 108, 11285–11290. https://doi.org/10.1073/pnas.1100483108
Ratcliff, R., & McKoon, G. (2008). The diffusion decision model: Theory and data for twochoice decision tasks. Neural Computation, 20(4), 873–922. https://doi.org/10.1162/neco.2008.12-06-420
Ratcliff, R., & Strayer, D. (2014). Modeling simple driving tasks with a one-boundary diffusion model. Psychonomic Bulletin & Review, 21, 577–589. https://doi.org/10.3758/s13423-013-0541-x
Ratcliff, R., & Tuerlinckx, F. (2002). Estimating parameters of the diffusion model: Approaches to dealing with contaminant reaction times and parameter variability. Psychonomic Bulletin & Review, 9(3), 438–481. https://doi.org/10.3758/bf03196302
Rouault, M., Dayan, P., & Fleming, S. M. (2019). Forming global estimates of selfperformance from local confidence. Nature Communications, 10(1), 1141. https://doi.org/10.1038/s41467-019-09075-3
Sanders, J. I., Hangya, B., & Kepecs, A. (2016). Signatures of a statistical computation in the human sense of confidence. Neuron, 90(3), 499–506. https://doi.org/10.1016/j.neuron.2016.03.025. Accessed 2024-03-04.
Schulte-Mecklenbeck, M., Johnson, J. G., Böckenholt, U., Goldstein, D. G., Russo, J. E., Sullivan, N. J., & Willemsen, M. C. (2017). Process-tracing methods in decision making: On growing up in the 70s. Current Directions in Psychological Science, 26(5), 442–450. https://doi.org/10.1177/0963721417708229. Accessed 2019-06-26.
Schürmann, T., & Beckerle, P. (2020). Personalizing human-agent interaction through cognitive models. Frontiers in Psychology, 11. https://doi.org/10.3389/fpsyg.2020.561510
Sevenster, A., Farah, H., Abbink, D., & Zgonnikov, A. (2023). Response times in drivers’ gap acceptance decisions during overtaking. Transportation Research Part F: Traffic Psychology and Behaviour, 94, 329–340. https://doi.org/10.1016/j.trf.2023.03.003. Accessed 2023-03-15.
Song, J.-H., & Nakayama, K. (2009). Hidden cognitive states revealed in choice reaching tasks. Trends in Cognitive Sciences, 13(8), 360–366. https://doi.org/10.1016/j.tics.2009.04.009. Accessed 2019-06-26.
Tillman, G., Strayer, D., Eidels, A., & Heathcote, A. (2017). Modeling cognitive load effects of conversation between a passenger and driver. Attention, Perception, & Psychophysics, 79, 1795–1803. https://doi.org/10.3758/s13414-017-1337-2
Wang, X., & Abdel-Aty, M. (2007). Modeling left-turn crash occurrence at signalized intersections by conflicting patterns. Accident Analysis & Prevention, 40, 76–88. https://doi.org/10.1016/j.aap.2007.04.006
Wispinski, N. J., Gallivan, J. P., & Chapman, C. S. (2020). Models, movements, and minds: Bridging the gap between decision making and action. Annals of the New York Academy of Sciences, 1464(1), 30–51. https://doi.org/10.1111/nyas.13973. Publisher: Wiley Online Library.
Yan, F., Weber, L., & Luedtke, A. (2015). Classifying driver’s uncertainty about the distance gap at lane changing for developing trustworthy assistance systems. In 2015 IEEE Intelligent Vehicles Symposium (IV) (pp. 1276–1281). https://doi.org/10.1109/IVS.2015.7225858. ISSN: 1931-0587.
Yan, F., Eilers, M., Lüdtke, A., & Baumann, M. (2016). Developing a model of driver’s uncertainty in lane change situations for trustworthy lane change decision aid systems. In 2016 IEEE Intelligent Vehicles Symposium (IV) (pp. 406–411). IEEE.
Yan, F., Eilers, M., Lüdtke, A., & Baumann, M. (2017). Building driver’s trust in lane change assistance systems by adapting to driver’s uncertainty states. In 2017 IEEE Intelligent Vehicles Symposium (IV) (pp. 529–534). IEEE. https://doi.org/10.1109/IVS.2017.7995772
Yan, F., Eilers, M., & Baumann, M. (2023). Investigating driver uncertainty about lane change decisions. Transportation Research Part F: Traffic Psychology and Behaviour, 95, 369–379. https://doi.org/10.1016/j.trf.2023.05.001. Accessed 2023-05-22.
Yeung, N., & Summerfield, C. (2012). Metacognition in human decision-making: Confidence and error monitoring. Philosophical Transactions of the Royal Society B: Biological Sciences, 367(1594), 1310–1321. https://doi.org/10.1098/rstb.2011.0416
Zgonnikov, A., Abbink, D., & Markkula, G. (2022). Should I stay or should I go? Cognitive modeling of left-turn gap acceptance decisions in human drivers. Human Factors: The Journal of the Human Factors and Ergonomics Society, 66(5), 1399–1413. https://doi.org/10.1177/00187208221144561. Accessed 2022-12-22
Zgonnikov, A., van Niekerk, M., Eisma, Y. B., & de Winter, J. (2023). Now or never: Eye tracking and response times reveal the dynamics of highway merging decisions. PsyArXiv Preprints. https://doi.org/10.31234/osf.io/6u35g. Accessed 2024–03–01.
Zgonnikov, A., Atiya, N. A. A., O’Hora, D., Rañò, I., & Wong-Lin, K. (2019). Beyond reach: Do symmetric changes in motor costs affect decision making? A registered report. Judgment and Decision Making, 14(4), 15. https://doi.org/10.1017/S1930297500006136
Zgonnikov, A., Beckers, N., George, A., Abbink, D., & Jonker, C. (2024). Nudging human drivers via implicit communication by automated vehicles: Empirical evidence and computational cognitive modeling. International Journal of Human-Computer Studies, 185, 103224. https://doi.org/10.1016/j.ijhcs.2024.103224. Accessed 2024-03-01.
Zylberberg, A., Barttfeld, P., & Sigman, M. (2012). The construction of confidence in a perceptual decision. Frontiers in Integrative Neuroscience, 6. https://doi.org/10.3389/fnint.2012.00079
Funding
None.
Author information
Authors and Affiliations
Contributions
Both authors, F.B. and A.Z., contributed to the conceptualization and investigation for this research. F.B. wrote the original draft manuscript and both authors wrote, reviewed and edited the main manuscript. F.B. conducted the data curation, formal analysis and visualization. A.Z. was responsible for the methodology, resources, software and supervision.
Corresponding author
Ethics declarations
Ethics Approval
This study was approved by the ethics committee from the Technical University Delft, the Netherlands. The procedures used in this study adhere to the tenets of the Declaration of Helsinki.
Consent to Participate
Informed consent was obtained from all participants prior to the study.
Consent to Publish
All participants included in the data analysis consented for their data to be used in the data analysis.
Competing Interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bontje, F., Zgonnikov, A. How Sure is the Driver? Modelling Drivers’ Confidence in Left-Turn Gap Acceptance Decisions. Comput Brain Behav (2024). https://doi.org/10.1007/s42113-024-00207-7
Accepted:
Published:
DOI: https://doi.org/10.1007/s42113-024-00207-7