
Abstract
This study presents a new bond-based peridynamic approach for modeling the elastic deformation of isotropic materials with bond stretch and rotation, thus removing the constraint on the Poisson’s ratio. The resulting PD equilibrium equations derived under the assumption of small deformation are solved by employing implicit techniques. The bond constants associated with stretch and rotation kinematic are directly related to the constitutive relations of stress and strain components in continuum mechanics. Also, the expressions for the critical stretch and critical relative rotation are derived in terms of mode I and mode II critical energy release rates, respectively. Lastly, it does not require a surface correction procedure, and the displacement and traction type boundary conditions are directly imposed without introducing fictitious regions in the domain. The capability of this approach is first demonstrated by capturing the correct deformation of plate type structures under general loading conditions. Subsequently, its capability for failure prediction is established by simulating the response of a double cantilever beam (DCB) under mode I type loading and compact shear specimen under mode II type loading.


























Similar content being viewed by others

References
Silling SA (2000) Reformulation of elasticity theory for discontinuities and long-range forces. J Mech and Physics of Solids 48:175–209
Silling SA, Epton M, Weckner O, Xu J, Askari E (2007) Peridynamic states and constitutive modeling. J Elast 88:151–184
Silling SA, Askari E (2005) A mesh-free method based on the peridynamic model of solid mechanics. Comput Struct 83:1526–1535
Ren H, Zhuang X, Rabczuk T (2016) A new peridynamic formulation with shear deformation for elastic solid. J Micromech Mol Phys 1:1650009
Zhang Y, Qiao P (2019) A new bond failure criterion for ordinary state-based peridynamic mode II fracture analysis. Int J Fract 215:105–128
Madenci E (2017) Peridynamic integrals for strain invariants of homogeneous deformation. Z Angew Math Mech 97:1236–1251
Huang Y, Oterkus S, Hou H, Oterkus E, Wei Z, Zhang S. (2019) Peridynamic model for visco-hyperelastic material deformation in different strain rates. Contin Mech Thermodyn 1-35 https://doi.org/10.1007/s00161-019-00849-0
Madenci E, Oterkus E (2014) Peridynamic theory and its applications. Springer, New York
Macek RW, Silling SA (2007) Peridynamics via finite element analysis. Finite Elem Anal Des 43:1169–1178
Beckmann R, Mella R, Wenman MR (2013) Mesh and timestep sensitivity of fracture from thermal strains using peridynamics implemented in Abaqus. Comp Meth in Appl Mech and Engr 263:71–80
Gerstle W, Sau N, Silling SA (2007) Peridynamic modeling of concrete structures. Nucl Eng Des 237:1250–1258
Diana V, Casolo S (2019) A bond-based micropolar peridynamic model with shear deformability: elasticity, failure properties and initial yield domains. Int J Solids Struct 160:201–231
Wang Y, Zhou X, Wang Y, Shou Y (2018) A 3-D conjugated bond-pair-based peridynamic formulation for initiation and propagation of cracks in brittle solids. Int J Solids Struct 134:89–115
Zhou X, Wang Y, Shou Y, Kou M (2018) A novel conjugated bond linear elastic model in bond-based peridynamics for fracture problems under dynamic loads. Eng Fract Mech 188:151–183
Gu X, Zhang Q (2020) A modified conjugated bond-based peridynamic analysis for impact failure of concrete gravity dam. Meccanica 55:547–566
Prakash N, Seidel GD (2015) A novel two-parameter linear elastic constitutive model for bond based peridynamics. 56th AIAA/ASCE/AHS/ASC structures, structural dynamics, and materials conference. AIAA 2015–0461
Zhou XP, Shou YD (2016) Numerical simulation of failure of rock-like material subjected to compressive loads using improved peridynamic method. Int J Geomech 17:04016086
Hu YL, Madenci E (2016) Bond-based peridynamic modeling of composite laminates with arbitrary fiber orientation and stacking sequence. Compos Struct 153:139–175
Zhu Q-Z, Ni T (2017) Peridynamic formulations enriched with bond rotation effects. Int J Eng Sci 121:118–129
Li WJ, Zhu QZ, Ni T (2020) A local strain-based implementation strategy for the extended peridynamic model with bond rotation. Comput Methods Appl Mech Engrg 358:112625
Huang X, Li S, Jin Y, Yang D, Su G, He X (2019) Analysis on the influence of Poisson’s ratio on brittle fracture by applying uni-bond dual-parameter peridynamic model. Eng Fract Mech 222:106685
Zheng G, Shen G, Xia Y, Hu P (2020) A bond-based peridynamic model considering effects of particle rotation and shear influence coefficient. Int J Numer Methods Eng 121:93–109
Ni T, Zaccariotto M, Zhu Q-Z, Galvanetto U (2019) Static solution of crack propagation problems in Peridynamics. Comput Methods Appl Mech Engrg 346:126–151
Hu Y, Chen H, Spencer BW, Madenci E (2018) Thermomechanical peridynamic analysis with irregular non-uniform domain discretization. Eng Fract Mech 197:92–113
Madenci E, Barut A, Futch M (2016) Peridynamic differential operator and its applications. Comput Methods Appl Mech Eng 304:408–451
Madenci E, Barut A, Dorduncu M (2019) Peridynamic differential operator for numerical analysis. Springer, New York
Madenci E, Barut A, Dorduncu M, Futch M (2017) Numerical solution of linear and nonlinear partial differential equations by using the peridynamic differential operator. Numer Methods Partial Differ Equ 33:1726–1753
Funding
This study was performed as part of the ongoing research at the MURI Center for Material Failure Prediction through Peridynamics at the University of Arizona (AFOSR Grant No. FA9550-14-1-0073).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
Peridynamic Functions
For three dimensional analysis, the matrix \({\mathbf{G}}({{\varvec{\upxi}}})\) and vector \({\mathbf{g}}({{\varvec{\upxi}}})\) are defined as
and
where the components of matrix \({\mathbf{G}}({{\varvec{\upxi}}})\) and the vector \({\mathbf{g}}({{\varvec{\upxi}}})\) are explicitly given by Madenci et al. [25, 26]. Their derivation is based on the PD differential operator, and they only depend on the spatial relation of the material points in the family of point, \({\mathbf{x}}\). The superscripts denote the order of differentiation with respect to the variable \(x_{{{i}}}\) with \({{i}} = 1,2,3\) and the subscript 2 represents the order of Taylor Series Expansion (TSE) in the construction of the PD functions.
For 2D analysis, they reduce to
and
The PD functions can be analytically evaluated if a material point is located symmetrically at the center of a circular interaction domain.
For 3D analysis, the matrix \({\mathbf{G}}({{\varvec{\upxi}}})\) and the vector \({\mathbf{g}}({{\varvec{\upxi}}})\) can be evaluated as
in which the weight function is specified as
With the substitution of the weight function, the PD representation of \(({\mathbf{n}} \otimes {\mathbf{n}})\) and \(({\mathbf{I}} - {\mathbf{n}} \otimes {\mathbf{n}})\) can be derived as
and
For 2D analysis, the matrix \({\mathbf{G}}({{\varvec{\upxi}}})\) and the vector \({\mathbf{g}}({{\varvec{\upxi}}})\) can be evaluated as
and
The PD representation of \(({\mathbf{n}} \otimes {\mathbf{n}})\) and \(({\mathbf{I}} - {\mathbf{n}} \otimes {\mathbf{n}})\) can be derived as
and
Appendix 2
Balance Laws
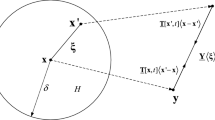
Based on the identity \(({\mathbf{a}} \otimes {\mathbf{b}}){\mathbf{c}} = ({\mathbf{b}} \times {\mathbf{c}}){\mathbf{a}}\) along with \(\left( {{\mathbf{n}} \otimes {\mathbf{n}}} \right){{\varvec{\upomega}}}({\mathbf{x}}){\mathbf{n}} = 0\), the force density vector given in Eq. (26) can be expressed as
With \({\mathbf{u}}({\mathbf{x^{\prime}}}) - {\mathbf{u}}({\mathbf{x}}) = ({\mathbf{y^{\prime}}} - {\mathbf{y}}) - {{\varvec{\upxi}}}\) and \({{\varvec{\upomega}}}({\mathbf{x}}){{\varvec{\upxi}}} = \Omega \times {{\varvec{\upxi}}}\), this expression can be rewritten as
where the rigid body rotation vector of the bond is defined as
Invoking the assumption of small deformation, \({\mathbf{y^{\prime}}} - {\mathbf{y}} \approx \left| {{\mathbf{y^{\prime}}} - {\mathbf{y}}} \right|{\mathbf{n}}\), Eq. (164) reduces to
In accordance with Eq. (13), it can be recast as
or
The linear momentum, \({\mathbf{L}}\), and angular momentum (about the coordinate origin), \({\mathbf{H}}_{0}\), of a fixed set of particles at time \(t\) in volume \(V\) are given by
and
The total force, \({\mathbf{F}}\), and torque, \({{\varvec{\Pi}}}_{0}\), about the origin can be expressed as
and
in which the evaluation of the integral \(\int\limits_{{H_{{\mathbf{x}}} }} {\mathbf{n}} \,dH_{{{\mathbf{x^{\prime}}}}} = 0\). Therefore, the total force and torque can be rewritten in the form
and
Because \({\mathbf{f}}({\mathbf{x^{\prime}}} - {\mathbf{x}}\,) = {\mathbf{f}}({\mathbf{x}} - {\mathbf{x^{\prime}}}\,) = {\mathbf{0}}\) for \({\mathbf{x^{\prime}}} \notin H_{{\mathbf{x}}}\), these equations can be recast to include all of the material points in volume \(V\) as
and
If the parameters \({\mathbf{x}}\) and \({\mathbf{x^{\prime}}}\) in the second integral on the right-hand side of these equations are exchanged, these integrals become
and
Therefore, the total force and torque simplify to
and
Invoking the assumption of small deformation, \({\mathbf{y^{\prime}}} - {\mathbf{y}} \approx \left| {{\mathbf{y^{\prime}}} - {\mathbf{y}}} \right|{\mathbf{n}}\) and noting that \(\int\limits_{V} {\mathbf{n}} \,dV = 0\), the expression for torque can be simplified as
The balance of linear momentum, \({\dot{\mathbf{L}}} = {\mathbf{F}}\), and angular momentum, \({\dot{\mathbf{H}}}_{0} = {{\varvec{\Pi}}}_{0} ,\) results in
and
Appendix 3
Matrices
For 3D analysis, the matrices appearing in Eq. (38) are defined as
and
Their integration over a spherical interaction domain results in
and
For 2D analysis, these matrices reduce to
and
Their integration over a circular interaction domain results in
and
Appendix 4
Relative Rotation Angle of Bonds
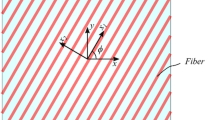
The relative rotation angle between any two bonds is derived by generalizing the skew angle concept introduced by Zhang and Qiao [5]. As illustrated in Fig. 27, the two bonds, \({\mathbf{\xi^{\prime}}} = {\mathbf{x^{\prime}}} - {\mathbf{x}}\) and \({\mathbf{\xi^{\prime\prime}}} = {\mathbf{x^{\prime\prime}}} - {\mathbf{x}}\), experience deformation and become \({\mathbf{y^{\prime}}} = {\mathbf{\xi^{\prime}}} + {\mathbf{u^{\prime}}}\) and \({\mathbf{y^{\prime\prime}}} = {\mathbf{\xi^{\prime\prime}}} + {\mathbf{u^{\prime\prime}}}\), respectively, in the deformed state. The unit vector \({\mathbf{N}}\) is perpendicular to the plane formed by bonds \({\mathbf{\xi^{\prime}}}\) and \({\mathbf{\xi^{\prime\prime}}}\). The unit vectors \({\mathbf{n'}}\) and \({\mathbf{t^{\prime}}}\), both in the plane formed by bonds \({\mathbf{\xi^{\prime}}}\) and \({\mathbf{\xi^{\prime\prime}}}\), are in the direction and perpendicular to \({\mathbf{\xi^{\prime}}}\), respectively.

The relative rotation (skew) angle, \(\gamma\) between bonds \({\mathbf{\xi^{\prime}}}\) and \({\mathbf{\xi^{\prime\prime}}}\) connected at material point x
The position of the bond, \({\mathbf{y^{\prime}}}\), can be described by
in which \({\mathbf{R}}\) is the rotation matrix in the counterclockwise direction defined as
which reduces to
for two-dimensional analysis with \(N_{1} = N_{2} = 0\) and \(N_{3} = 1\). The angle between \({\mathbf{\xi^{\prime}}}\) and \({\mathbf{y^{\prime}}}\) is defined as \(\varphi\), and it can be determined from
The position of bond \({\mathbf{y^{\prime\prime}}}\) with respect to the undeformed state can be obtained as
As shown in Fig. 27, the relative rotation angle of bond, \({\mathbf{\xi^{\prime}}}\), with respect to \({\mathbf{\xi^{\prime\prime}}}\) can be expressed as
Rights and permissions
About this article

Cite this article
Madenci, E., Barut, A. & Phan, N. Bond-Based Peridynamics with Stretch and Rotation Kinematics for Opening and Shearing Modes of Fracture. J Peridyn Nonlocal Model 3, 211–254 (2021). https://doi.org/10.1007/s42102-020-00049-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42102-020-00049-4