
Abstract
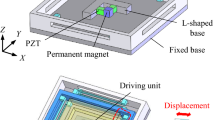
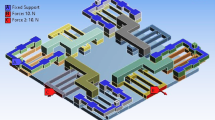
This paper presents a compact XYZ micro-stage driven by an impact driving mechanism. A moving body is translationally actuated along the X-, Y-, and Z-axes in millimeter-scale range and with nanometer-scale resolution. Cr–N thin-film strain sensors are integrated into the micro-stage for closed-loop positioning. Closed-loop control is also carried out. The motion errors in six degrees of freedom are also investigated for this micro-stage. It is clarified by analysis of finite element method that rotational motion errors around the driving axis are caused by torques due to tensions from the elastic hinges of micro-stage. The mechanical structure of XYZ micro-stage to cancel out the torque generated is proposed and the second prototype is fabricated. Although the rotational motion error is successfully suppressed in the second prototype, a rotational motion error of more than 0.1° remains due to remaining torque and assembly error of the elastic hinges. Then, in order to reduce the rotational motion error, the prototype is designed in which the location of elastic hinges is single-layered. By designing a mechanical structure in which torque is suppressed, all rotational motion errors are successfully reduced to less than 0.05° in the prototype with single-layer hinges.























Similar content being viewed by others

Change history
23 November 2022
A Correction to this paper has been published: https://doi.org/10.1007/s41871-022-00164-4
References
Gao W, Kim SW, Bosse H, Haitjema H, Chen YL, Lu XD, Knapp W, Weckenmann A, Estler WT, Kunzmann H (2015) Measurement technologies for precision positioning. CIRP Ann Manuf Technol 64:773–796
Manske E, Jäger G, Hausotte T, Füßl R (2012) Recent developments and challenges of nanopositioning and nanomeasuring technology. Meas Sci Technol 23(7):074004
Gao W, Araki T, Kiyono S, Okazaki Y, Yamanaka M (2003) Precision nano-fabrication and evaluation of a large area sinusoidal grid surface for a surface encoder. Precis Eng 27(3):289–298
Culpepper ML, Anderson G (2004) Design of a low-cost nano-manipulator which utilizes a monolithic, spatial compliant mechanism. Precis Eng 28(4):469–482
Yan P, Zhang Y (2018) High precision tracking of a piezoelectric nano-manipulator with parameterized hysteresis compensation. Smart Mater Struct 27:065018
Fung RF, Hsu YL, Huang MS (2009) System identification of a dual-stage XY precision positioning table. Precis Eng 33(1):71–80
Chu CL, Fan SH (2006) A novel long-travel piezoelectric-driven linear nanopositioning stage. Precis Eng 30(1):85–95
Yong YK, Aphale SS, Moheimani SOR (2009) Design, identification, and control of a flexure-based XY stage for fast nanoscale positioning. IEEE Trans Nanotachnol 8(1):46–54
Gao W, Dejima S, Yanai H, Katakura K, Kiyono S, Tomita Y (2004) A surface motor-driven planar motion stage integrated with an XYθZ surface encoder for precision positioning. Precis Eng 28(3):329–337
Huang X, Lee J, Ramakrishnan N, Bedillion M, Chu P (2010) Nano-positioning of an electromagnetic scanner with a MEMS capacitive sensor. Mechatronics 20(1):27–34
Zhang S, Kiyono S (2001) An absolute calibration method for displacement sensors. Measurement 29(1):11–20
Shimizu Y, Matsukuma H, Gao W (2019) Optical sensors for multi-axis angle and displacement measurement using grating reflectors. Sensors 19(23):5289
Li X, Gao W, Muto H, Shimizu Y, Ito S, Dian S (2013) A six-degree-of-freedom surface encoder for precision positioning of a planar motion stage. Precis Eng 37:771–781
Teimel A (1992) Technology and applications of grating interferometers in high-precision measurement. Precis Eng 14(3):147–154
Kunzmann H, Pfeifer T, Flügge J (1993) Scales vs laser interferometers. Performance and comparison of two measuring systems. CIRP Ann Manuf Technol 42(2):753–767
Newnham R, Dogan A, Xu Q, Onitsuka K, Tressler J, Yoshikawa S (1993) Flextensional Moonie actuators. Proc IEEE Ultrason Symp 1:509–513
Li J, Sedaghati R, Dargahi J, Waechter D (2005) Design and development of a new piezoelectric linear Inchworm actuator. Mechatronics 15(6):651–681
Morita T, Yoshida R, Okamoto Y, Higuchi T (2002) Three DOF parallel link mechanism utilizing smooth impact drive mechanism. Precis Eng 26(3):289–295
Liu YT, Wang CW (2002) A self-moving precision positioning stage utilizing impact force of spring-mounted piezoelectric actuator. Sens Actuators A Phys 102:83–92
Tan Y, Lu P, Zu J, Zhang Z (2017) Large stroke and high precision positioning using iron–gallium alloy (Galfenol) based multi-DOF impact drive mechanism. Precis Eng 49:401–411
Rupitsch SJ (2019) Piezoelectric sensors and actuators. Springer, Berlin
Gan J, Zhang X, Li H, Wu H (2017) Full closed-loop controls of micro/nano positioning system with nonlinear hysteresis using micro-vision system. Sens Actuators A Phys 257(15):125–133
Motamedi M, Ahmadian MT, Vossoughi G, Rezaei SM, Zareinejad M (2011) Adaptive sliding mode control of a piezo-actuated bilateral teleoperated micromanipulation system. Precis Eng 35(2):309–317
Shen J, Jywe W, Chiang H, Shu Y (2008) Precision tracking control of a piezoelectric-actuated system. Precis Eng 32(2):71–78
Goto S, Hosobuchi K, Gao W (2011) An ultra-precision scanning tunneling microscope Z-scanner for surface profile measurement of large amplitude micro-structures. Meas Sci Technol 22:085101
Shimizu Y, Peng Y, Kaneko J, Azuma T, Ito S, Gao W, Lu TF (2013) Design and construction of the motion mechanism of an XY micro-stage for precision positioning. Sens Actuators A Phys 201:395–406
Peng Y, Ito S, Sakurai Y, Shimizu Y, Gao W (2013) Construction and verification of a linear-rotary microstage with a millimeter-scale range. Int J Precis Eng Manuf 14(9):1623–1628
Niwa E, Sasaki Y (2014) Cr–N strain sensitive thin films and their pressure sensor applications. IEEJ Trans Sens Micromach 134(12):385–391
Azuma T, Niwa E, Peng Y, Kaneko J, Shimizu Y, Ito S, Gao W (2012) Cr–N strain-gauge-type precision displacement sensor for measuring positions of micro stage. Key Eng Mater 523–524:939–944
Arai Y, Gao W, Kiyono S, Kuriyagawa T (2005) Measurement of the straightness of a leadscrew-driven precision stage. Key Eng Mater 295–296:259–264
Gao W, Yokoyama J, Kojima H, Kiyono S (2002) Precision measurement of cylinder straightness using a scanning multi-probe system. Precis Eng 26:279–288
Matsukuma H, Asumi Y, Nagaoka M, Shimizu Y, Gao W (2021) An autocollimator with a mid-infrared laser for angular measurement of rough surfaces. Precis Eng 67:89–99
Acknowledgements
This work was supported by JSPS KAKENHI Grant Numbers JP 15H05759 and JP 20H00211.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing Interests
Wei Gao is an executive editor for "Nanomanfucturing and Metrology" and was not involved in the editorial review, or the decision to publish this article. All authors declare that there are no competing interests.
Additional information
The original online version of this article was revised: The declaration text was missing
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Matsukuma, H., Adachi, K., Sugawara, T. et al. Closed-Loop Control of an XYZ Micro-Stage and Designing of Mechanical Structure for Reduction in Motion Errors. Nanomanuf Metrol 4, 53–66 (2021). https://doi.org/10.1007/s41871-020-00091-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41871-020-00091-2