
Abstract
In this work, the doubly-fed induction generator (DFIG), rotor side converter (RSC) is controlled to regulate its reactive power output. A brief comparative study has been carried out between two different RSG control techniques, based on their ability to restore voltage stability of a power system. From this study the better DFIG–RSC control strategy has been identified. The results are tested in IEEE-14 bus system and simulated in MATLAB.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The share of renewable energy integration to the modern power grid is increasing across the globe. Power generation from renewable sources being time variable, its effect on system stability is a matter of concern. This work emphasizes on the effects of wind power generation on dynamic voltage stability of a system. As evident in literature, that voltage instability occurs in a stressed system due to the presence of under load/on load tap changer (ULTC), generator over-excitation limiter (OXL) and loads (Cutsem and Vournas 1998). It is inevitable that in a wind farm integrated system, voltage stability will also be affected by the wind electrical system (Zheng and Kezunovic 2010; Kumar et al. 2014). The connection of doubly fed induction generator (DFIG) with a back to back converter in the rotor circuit allows a wide range of speed variation (Bhadra et al. 2005; Folly and Sheetekela 2009). As the converter is connected to the rotor circuit, only a fraction of the total power passes through the converter. Hence, the converter rating is less compared to the full power converter in a direct drive system (Devaraj and Jeevajyothi 2011). With the help of the converter controllers, DFIG can be made to operate in terminal voltage control mode or reactive power control mode, thus influencing the voltage stability of a system. However, the capacity of DFIG to control bus voltage is limited by the rating of the converters (Chi et al. 2006). It is also found that DFIG operating in voltage control mode can improve voltage stability margin of a system compared to its operation in constant power factor mode (Muñoz and Cañizares 2011).
In this paper, a comprehensive comparative study has been carried out between efficiency of different RSC control schemes of DFIG on restoring voltage stability of a system. The efficacy of fixed capacitor to prevent voltage collapse is also observed and finally the most promising one among all these to restore stability of a system has been identified. The study also found that the selected RSC control scheme makes the reactive power injection through static shunt compensation redundant.
System Description
Wind Farm
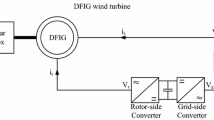
For simplicity of analysis, in this work the wind farm is represented by an aggregated equivalent wind-turbine-generator. The DFIG stator and rotor dynamics are considered (Mei 2008; Pal and Mei 2008; Mei and Pal 2005) for this study. The corresponding state variables are the rotor speed, the d-axis and the q-axis components of the stator current (i ds ,i qs ) and rotor current (i dr , i qr). The wind turbine and the DFIG rotating mass is represented by the single-mass model (Mei 2008). Wind turbine generator specifications are as per (Mei 2008; Pal and Mei 2008). DFIG is connected to a load bus of the IEEE-14 bus system through a double circuit line and a transformer (Donnelly et al. 1996) as shown in Fig. 1.

DFIG connection to the load bus
Throughout this study it has been assumed that the wind farm is operating at its rated wind speed with a capacity of 100 MW.
DFIG Rotor Side and Grid Side Converter Controllers (Pal and Mei 2008; Mei and Pal 2005)
The rotor side converter (RSC) and grid side converter (GSC) of the DFIG allow bi-directional power flow in the rotor circuit. As a result, a wide range of speed variation becomes possible. The RSC controller consists of two decoupled loops, shown in Figs. 2 and 3. The slower outer loop achieves electrical torque (T e) and reactive power (Q tot) control and produces the reference current for the faster inner current control loop. Q tot is the stator reactive power. Subscript “ref” stands for the reference point. K x and T x are the proportional gains and the integral time constants, respectively. This control scheme has been referred to as T e − Q tot control, in the rest of the paper.

DFIG rotor side converter reactive power control loop

DFIG rotor side converter electromagnetic torque control loop
In this work, for minimum converter rating the power sharing is neglected and it is assumed that the reactive power supplied by the DFIG comes from the stator side. Due to the faster dynamics of the GSC and the DC-link, the grid side converter dynamics and DC link dynamics has been neglected and the GSC is represented as a current source. The current source magnitude is set such that the active power supply to the grid, i.e., P GSC, in Fig. 1 matches the power supplied by DFIG in the rotor circuit, i.e. P R at unity power factor.
Synchronous Machine and Network Model
The synchronous generators of the system are represented by the flux decay model (Sauer and Pai 2002). The state variables are angular position of rotor (δ), per unit speed deviation of rotor (Δω) and q-axis component of the voltage behind the transient reactance (E′ q). A static exciter is considered which is represented by one gain and one time constant. The corresponding state variable is the exciter voltage (E fd). The network dynamics is neglected. Network is represented using algebraic equations. The algebraic variables are bus voltage magnitude (V i) and angle (θk i).
OXL and ULTC (Cutsem and Vournas 1998)
Each synchronous generator is equipped with an over excitation limiter (OXL) to keep the generator field current within its limit. In this study, the pre-disturbed field current value is taken as the reference field current of the OXL. OXL starts operating with an initial delay (t oxl). The system is equipped with ULTC transformers which regulate the load end voltage by changing its tap positions. For simplicity of study it is considered that, the initial mechanical delay (t ultc) and intermediate delay (delay between consecutive tap movements, t int) of all the ULTC transformers present in the system are same.
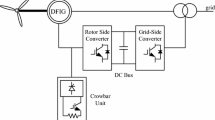
IEEE-14 bus system, as shown in Fig. 4 consists of two synchronous generators and three condensers. All are equipped with OXLs. The 2 winding transformer connected between buses 4 and 9 is modelled as ULTC transformer.

IEEE 14-bus system (Power System Toolbox, Version 3.0 2008)
Load Modelling
Wind farm integrated multi-machine system has been studied using constant power (CP) and induction motor load (IM). The approximate load compositions are as follows
Voltage Collapse Prevention in Wind Farm Connected System
In this section the voltage stability of IEEE-14 bus system, followed by line outage contingency has been studied. The DFIG–RSC is controlled by the T e–Q tot control strategy discussed in “DFIG Rotor Side and Grid Side Converter Controllers (Pal and Mei 2008; Mei and Pal 2005)”. The fatal cases from this study are evaluated twice, once with capacitive compensation and next with no compensation but a modified RSG control strategy.
Voltage Collapse in a Wind Farm Connected System
In this study, DFIG is operating with T e–Q tot control mode and the reactive power output of the DFIG, i.e., Qtotref in Fig. 2 is maintained constant at one-tenth of its rated active power. IEEE-14 bus system being a small and steady system, double line outage contingency is simulated to induce voltage instability.
Figure 5 shows a voltage collapse case. This case is simulated with a wind farm connected to bus 13 and the system load is L d type. An outage of line 1–2 takes place at 30 s. ULTC and OXL start operating at 40 s (i.e., with an initial delay t ultc = t oxl = 10 s). After this, the tap positions keep changing (if required) with an intermediate delay, tint = 5 s. Outage of a second line (4–5) takes place at t = 55 s. The variations of the voltages of bus 9 (ULTC regulated bus) and bus 13 (DFIG connected bus) are shown in Fig. 5a with dotted line and solid line, respectively. The variation in the slips of the induction motors connected to the buses numbered 6, 13 and 14 are shown in Fig. 5b. It can be observed from Fig. 5a, b that with fall in voltages, motor slips increase and eventually start stalling. Voltages of the two buses fall below 0.7 pu. The low bus voltage level and the stalling of induction motors connected to the system indicate voltage instability.

Variation of bus voltages (a) and induction motor (IM) slips (b)
Figure 6 shows the change in the relative rotor angles of generator 2 and 3, i.e., generators connected to bus 2 and 3, respectively, with respect to the generator connected to bus1. The damped oscillation in the relative rotor angles indicates the above instability is not an angular instability.

Generators 2 and 3 relative rotor angle during voltage instability
System Stability Restoration with Capacitive Compensation
The voltage collapse case observed in “Voltage Collapse in a Wind Farm Connected System”, is studied again with a capacitive compensation, keeping other system conditions unchanged. A shunt capacitor bank is switched at the regulated side of the ULTC transformer (Taylor 1994), i.e., bus 9, when voltage of its regulated end falls below a threshold value. The size of the capacitor is kept nearly equal to the reactive load of the bus, to which it is connected (Taylor 1994). Hence, the capacitor size is about 20 MVAR. The capacitor bank is switched in, as soon as the bus 9 voltage falls below 0.85 pu.
The bus voltages and slips of induction motors are shown in Fig. 7a, b, respectively. It is evident from Fig. 7 that with the capacitive compensation induction motors continue to operate stably, following line outages. Voltages of bus 9 and bus 13 remained above 0.8 pu. Therefore, from this study it can be concluded that the stability of the system is improved with switching a capacitor at ULTC regulated bus.

Dynamics of bus voltages (a) and induction motor slips (b) over time
System Stability Restoration with Modified Control of DFIG–RSC
The increase in the reactive power output of the DFIG may also help to prevent collapse. To verify this presumption, the voltage collapse case observed in “Voltage Collapse in a Wind Farm Connected System” is studied with a modified DFIG–RSC control, as shown in Fig. 8. Unlike the RSC q-axis control loop or reactive power control loop as discussed in “DFIG Rotor Side and Grid Side Converter Controllers (Pal and Mei 2008; Mei and Pal 2005)”, this modified RSC controller can control both voltage and reactive power.

DFIG q-axis control loop (Chi et al. 2006)
As shown in Fig. 2 the DFIG–RSG controller is augmented by including the option of using DFIG terminal voltage (V s ) as a control variable for the cases where V s falls below a predefined threshold (V sref). Otherwise (when V s > V sref), the reactive power of DFIG continues to be the control variable. The error signal generated from outer loop of the RSC generates the reference q-axis rotor current for the inner current control loop. Here, V qrref is the reference for the q-axis voltage of the rotor. This control technique is referred in this paper as (T e –Q tot /V s ) control. The study described in “Voltage Collapse in a Wind Farm Connected System” is repeated in this section with (T e–Q tot /V s ) control technique of DFIG. During this study system is without any capacitive compensation. Objective of this study is to observe the effect of (T e–Q tot /V s ) control scheme on voltage stability of the system.
Variations in the bus voltages and slip of induction motors are shown in Fig. 9a, b, respectively. From the variation in the induction motor slip it can be stated that, motors remained in their stable operating regions, following the disturbances. Voltages of bus 9 and 13 are above 0.8 pu. Hence, from this study it can be inferred that, with (T e–Q tot /V s) control technique of DFIG–RSC, system stability can be improved.

Dynamics of bus voltages (a) and induction motor slips (b) with DFIG T e –Q tot /V s control technique
A Comprehensive Comparison Between Capacitive Compensation and (Te–Qtot/Vs) Control
In “System Stability Restoration with Capacitive Compensation” and “System Stability Restoration with Modified Control of DFIG–RSC”, we have studied two different methods for restoring voltage stability of a stressed system. Unstable cases of “Voltage Collapse in a Wind Farm Connected System”, with DFIG–RSC T e–Q tot control scheme are listed in Table 1. All these catastrophic collapse cases are simulated with capacitive compensation, as illustrated in “System Stability Restoration with Capacitive Compensation” and the modified DFIG–RSG control scheme as described in “System Stability Restoration with Modified Control of DFIG–RSC”. The system conditions are also enlisted in Table 1.
It is evident from Table 1, that the collapse cases observed with DFIG, RSC T e–Q tot control scheme can be prevented in a very nominal number of cases with capacitive compensation. However, a lion’s share of the collapse scenarios can be restored with DFIG, RSC T e–Q tot /V s control scheme. So, it can be inferred from this study that DFIG, RSC T e–Q tot /V s control scheme improves voltage stability of a system considerably. Moreover, with this control scheme, there is no need to put a capacitor at the regulated end of the ULTC transformer to restore stability.
Effect of the DFIG–RSC T e–Q tot /V s Control Scheme on the RSC Ratings
According to “Voltage Collapse Prevention in Wind Farm Connected System”, the use of capacitor to prevent voltage collapse can be avoided with a simple modification in the RSC control scheme by using DFIG terminal voltage as the control variable under certain conditions. However, it is important to check the effect of this modification on the rotor current and voltage, as the converter rating depends on these values. For this work, the limits used for DFIG–RSC voltage and current are, respectively, ±10 % of the pre-disturbance rotor current and ±30 % of the pre-disturbance rotor voltage. These values of DFIG, in IEEE-14 bus system are V rmax = 0.298 pu; V rmin = 0.1604 pu; I rmax = 1.2249 pu; I rmin = 0.6596 pu.
The maximum rotor current and rotor voltage for the cases listed in Table 1 are enlisted in Table 2. It can be concluded from Table 2 that with this T e–Q tot /V s control of DFIG–RSC there is no need to change the converter rating. Keeping the RSC current and voltage within its limit, the T e–Q tot /V s control scheme can prevent voltage instability.
Conclusion
This paper discusses about two schemes to prevent voltage instability of a system. After doing a comparative study between the two techniques, (1) DFIG rotor side converter T e –Q tot control along with switching on a fixed capacitor and (2) DFIG rotor side converter T e –Q tot /V s control, it can be concluded that the (T e –Q tot /V s ) control is more efficient in improving the voltage stability conditions of a system. This modification of the DFIG rotor side converter control does not require any change in the RSC rating. Moreover, this study also concludes that the DFIG (T e –Q tot /V s ) control eliminates the need of connecting a capacitor at the regulated end of the ULTC transformer.
References
Bhadra SN, Kastha D, Banerjee S (2005) Wind electrical systems. Oxford University Press, New Delhi, India
Chi Y, Liu Y, Wang W, Dai H (2006) Voltage stability analysis of wind farm integration into transmission network. In: International conference on power system technology
Devaraj D, Jeevajyothi R (2011) Impact of wind turbine systems on power system voltage stability. In: International conference on computer, communication and electrical technology, March 2011
Donnelly MK, Dagley JE, Trudnowski DJ, Rogers GJ (1996) Impacts of the distributed utility on transmission system stability. IEEE Trans Power Syst 11(2):741–746. doi:10.1109/59.496148
Folly KA, Sheetekela SPN (2009) Impact of fixed and variable speed wind generators on the transient stability of a power system network. In: Power systems conference and exposition, March 2009
Kumar VSS, Reddy KK, Thukaram D (2014) Coordination of reactive power in grid-connected wind farms for voltage stability enhancement. IEEE Trans Power Syst 29(5):2381–2390
Mei F (2008) Small signal modelling and analysis of doubly-fed induction generators in wind power applications. PhD thesis, Department of Electrical and Electronic engineering, Imperial College London
Mei F, Pal B (2005) Modal Analysis of grid-connected doubly fed induction generators. IEEE Trans Energy Convers 22(3):728–736
Muñoz JC, Cañizares CA (2011) Comparative stability analysis of DFIG-based wind farms and conventional synchronous generators. In: 2011 IEEE/PES power systems conference and exposition (PSCE), Phoenix, AZ, p 1–7. doi:10.1109/PSCE.2011.5772545
Pal BC, Mei F (2008) Modelling adequacy of the doubly fed induction generator for small signal stability studies in power system. IET Renew Power Gen 2(3):181–190
Power System Toolbox, Version 3.0 (2008) Cherry Tree Scientific Software
Sauer PW, Pai MA (2002) Power system dynamics and stability. Pearson Education Singapore Pte. Ltd. (First Indian Reprint)
Taylor CW (1994) Power system voltage stability. McGraw-Hill Ryerson, Limited
Van Cutsem T, Vournas C (1998) Voltage stability of electric power system. Springer
Zheng C, Kezunovic M (2010) Distribution system voltage stability analysis with wind farms integration. In: North American power symposium (NAPS), 2010, Arlington, TX, pp 1–6
Acknowledgments
The authors thank Department of Science and Technology, New Delhi, India for financially assisting this work through the project numbered, SR/S3/EECE/0043/2009.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Konar, S., Chatterjee, D. Voltage Collapse Prevention in Doubly Fed Induction Generator Based Wind Farm Connected Power System. INAE Lett 1, 41–46 (2016). https://doi.org/10.1007/s41403-016-0008-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41403-016-0008-2