
Abstract
A train–bridge coupling vibration model for low-speed maglev traffic was established to study the dynamic response of low-medium speed Maglev Train and simply supported beam interation system. In this model, the vehicle is assumed as a secondary suspension mass-spring-damper model with 12 degrees of freedom. The finite element model is supplied to simulate the bridge structure. The influence of the track irregularity is also taken into account. Then, the program for vertical coupling vibration simulation of low-speed maglev traffic is developed. Finally, a field test was carried out on a 25-m simply supported beam in a low-speed maglev test line. The results show that the fundamental frequency, the vibration mode, the mid-span dynamic deflection and the acceleration of the track beam measured values are slightly smaller than the simulation results. When the maglev train passes the simply supported beam, the measured acceleration values of the vehicle are slightly less than the simulation ones. These research results show that the vertical coupling vibration model of low-speed maglev train–track beam is reasonable and the simulation results are credible. With the increase of speed, the accelerations of the bridge and car body are increased in the overall trend. But, the acclerations of the bridge and the maglev car body are both small versus the speed, wich indicates that the dynamic performanceof the bridge and maglev train are good.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Since the twenty-first century, China’s urban rail transit has experienced rapid development. Low-speed maglev transportation has become one of the most competitive green ground transportation systems by the virtue of low noise, excellent climbing ability, small turning radius and many other advantages. The maglev system is different from the wheel–rail system, and its coupling effect is more complex. Therefore, it is necessary to study the coupling vibration of the low-speed maglev train–track beam system.
At present, the coupling vibration research of the track beam of maglev train at home and abroad is mostly conducted for high-speed maglev, such as Yang [1] used moving uniform mass model to analyze the vibration of track beam; Zeng [2] analyzed coupling vibration of vehicle–track beam by simplifying the maglev vehicle as a 7 rigid body vibration system connected by a spring damping element; Teng [3], based on the prototype of the German maglev vehicle, established the coupling vibration analysis model of high-speed maglev vehicle–track beam which includes 10 DOF vehicle model, electromagnet model, track beam model and suspension control model.
This paper, based on the existing research results, introduced of a feedback mechanism with the active control of the suspension controller and used finite element method to build the bridge structure model. The maglev vehicle is simplified as a vertical model with 12 degrees of freedom and secondary suspension. Track irregularity is also considered. The vertical coupling vibration analysis model of the maglev car bridge is established.
The dynamic load test was carried out on the 25-m simply supported beam of a low-speed maglev test line. The contrast between the simulated values and the measured values of the field test shows that this model is reasonable.
2 Theoretical Model
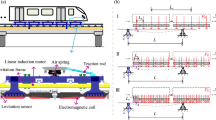
In this paper, the train–bridge dynamic simulation analysis model of low-speed maglev vehicle system is composed of maglev vehicle model, bridge model, electromagnet system model and suspension controller model, with consideration of the track irregularity, according to a certain track relationship (as shown in Fig. 1). The numerical simulation analysis method is used to solve the dynamic response of maglev train–bridge system.

Dynamic simulation analysis model
2.1 Vertical Dynamic Model of Maglev Vehicle Model
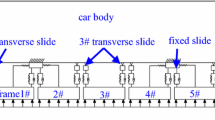
The vertical model of the maglev vehicle consists of six rigid bodies, includinga car body and five suspension frames. Each rigid body vertically considers two degrees of freedom of nods, ups and downs. The vertical dynamic model of maglev vehicle is shown in Figs. 2 and 3.

Vertical model of vehicle

Electromagnet system model
In Fig. 2, M ci , J ci , y ci and α i denote the mass, moment of inertia, displacement and nod angle at the center of gravity (or geometrical center) of the ith maglev vehicle. f kim and f sim, respectively, represent the maglev vehicle department of suspension point of the spring force and damping force:
where K p and C p represent the two-line suspension stiffness and damping, and \(y_{\text{im}}^{T}\) and \(y_{\text{im}}^{B}\) represent the displacement of the top and bottom points of the vehicle body to the corresponding secondary suspension points.
Using the d’Alembert principle, the vertical dynamic equation of a maglev vehicle system can be written.
Considering that the maglev vehicle is composed of three carriages, the whole vehicle system has 36 degrees of freedom in the vertical direction. In the simulation analysis, the numerical method is used for solving.
2.2 The Model of Bridge
When finite element method is used to analyze the dynamic behavior of the bridge structure, two parts are analyzed including the characteristics of bridge vibration and dynamic response. The dynamic response analysis is mainly used to solve the structural response (such as displacement, velocity and acceleration) with the time course of change.
The finite element method is used to analyze the dynamic behavior of the bridge structure. The derivation of the motion equation of the bridge structure is shown as follows:
where M, C, and K are the mass matrix, the damping matrix and the stiffness matrix for the global coordinate system, respectively. X is the total column vector of the system displacement, and F is the external load column vector.
The vibration superposition method and step-by-step integration method [4] are two methods which are used to solve system motion equation. In this paper, the Newmark-β integration method is used for solving.
2.3 The Model of Electromagnet System
The electromagnet model is based on the EMS-type SC magnets in Ref. [5], including guideway iron rail, iron-core magnet, SC coil and normal coil. The model is shown in Fig. 3. The current I SC in the constant current coil is provided by a constant current source in which the total weight of the maglev vehicle is balanced by the electromagnetic force generated by the constant current.
The time-varying current i in the rated coil, which is driven by a control voltage source, is used to maintain the suspension gap h in the vicinity of its rated value. Electromagnet system parameters are shown in Table 1.
2.4 The Model of Suspension Controller
Considering that maglev system itself is an unstable system [2, 6, 7], to achieve suspension stability, the introduction of active control of the suspension controller is necessary. The suspension controller function is to generate the appropriate time-varying control voltage according to a certain algorithm generated by the feedback signal of the sensor installed at the bottom of the suspension. Then, the time-varying current is generated to adjust the maglev vehicle and maintain the suspension gap in the rated suspension gap.
Considering all factors, the PD control method, which is commonly used in industrial control, is induced in this project. The model is shown in Fig. 4. h 0 is the rated floating clearance; k p and k d are the two key control parameters of the suspension controller, respectively; u denotes the time-varying control voltage.

Suspension controller model
3 The Equations of Vertical Coupled Vibration
The vertical motion equations the vehicle and bridge structure can be written as the following matrix form.
Among them, M v+b , C v+b , K v+b denote the mass, damping and stiffness matrices of the system, respectively. u v+b represents the displacement column vector of the system, and P v+b represents a load column vector.
Formula 4 form a large-scale complex time-varying nonlinear dynamic system. To solve such a dynamic system, only the time of numerical integration method can be used. The Newmark-β method is used to solve the dynamic responses of the maglev vehicle and the bridge structure. In the calculation, the time step is 0.001 s.
The main idea is to calculate the suspension clearance h and the change rate of floating gap at the current time based on the previous maglev vehicle and bridge response. It can be substituted into the suspension controller equation for the current control voltage u and solved for the time-varying current i according to the solenoid system loop equation. The electromagnetic force f at the current moment can be calculated. Finally, the current maglev vehicle and bridge response can be obtained by solving the vibration equation. Repeating the above process, the entire maglev vehicle bridge vibration response of the whole process can be solved.
4 Field Test
In order to verify the rationality of the model and the reliability of the simulated program, a field test of a 25-m simply supported beam on a maglev test line was carried out.
Figure 5 shows the mid-span section of the concrete simply supported track beam. Two sides of the beam are, respectively, single track beam. The bridge span is 24.94 m. The height is 2.1 m, and the width is 1.3 m. The material of the beam is C55 concrete, and the second phase of the dead load is 10 kN/m. The design speed is 100 km/h. Round-shaped pier is used with height of 11.25 m. Figure 6 shows the field test photos.

Mid-span section of the track beam (unit: cm)

Photographs of the field test
During the test, a typical span was selected according to the site conditions. The vertical displacement, vibration and acceleration sensors were arranged at the mid-span to measure the dynamic displacement and acceleration of the bridge.
Loading conditions include car body loads of 24, 30 and 33 t. The speed rating is 50–100 km/h. Due to the random response of the dynamic factors and in order to ensure the test accuracy, each test condition includes no less than 6 groups.
5 Comparison and Analysis of Simulation and Measurement
Using the program developed in this paper, the vehicle–bridge coupling vibration of the 25-m simply supported beam on the maglev test line is analyzed and compared with the measured values in the field test. The effect of track irregularities is also considered. Track irregularity is shown in Fig. 7.

Track irregularity
The maximum displacement and acceleration of the bridge structure are obtained by peak analysis of the recorded acceleration and displacement time history curves. The measured value of the vertical base frequency of the bridge is 6.768 Hz, slightly larger than the calculated value 6.030 Hz.
The measured results show that the measured base frequency of the bridge is higher than the simulation value, due to the impact of the track structure. The measured simulation mode is the same as the simulation mode.
When the test maglev vehicles pass the 25-m simply supported beam in the speed of 50–100 km/h, the contrast of the beam in the dynamic deflection and vertical acceleration between the simulation value and the measured values is shown in Tables 2 and 3. The contrast of vertical acceleration of the maglev train body between the simulation values and the measured values is shown in Table 4.
It can be seen from Tables 2, 3, 4, when maglev vehicles pass through the 25-m simply supported beam:
-
1.
Through the theoretical simulation, it could be seen that values of the mid-span deflection and acceleration of the track beam vary with the speed of the vehicle.
-
2.
The theoretical simulation value of the mid-span deflection and acceleration of the track beam is at the same order of magnitude of the test value however it is slightly bigger than the measure value. The change rule is consistent with the measured value.
-
3.
The measured values of the vertical acceleration of the maglev vehicle are close to the theoretical simulation values, and the measured values are basically smaller than the theoretical simulation values.
-
4.
The heavier the maglev train, the greater deflection of the bridge and the acclerations of the bridge and car body are. The regular of simulation values between the weight of the cay body and the dynamic responses is the same as that of the measured.
6 Conclusions
In this paper, based on the existing research results, the vertical vibration analysis model of the maglev car bridge is established including a feedback mechanism with active control of the suspension controller, the finite element method to build the bridge structure model, the maglev vehicle for 12 degrees of freedom of the two-line vertical model and the track irregularities. Relevant program is worked out based on this. A field test is carried out.
The result of field test shows that:
-
1.
The measured base frequency of the bridge span structure is slightly higher than the simulation calculation frequency, but vibration mode is the same.
-
2.
The measured values of the vertical acceleration in the beam are close to and slightly smaller than the simulation values. The theoretical simulation value of vehicle acceleration is consistent with the measured law. The variation trend is the same. The analysis result of the compiled software is credible.
-
3.
With the increase of speed, the accelerations of the bridge and car body increases in the overall trend. With the increase of the maglev weight, the accelerations of the bridge and car body increases.
-
4.
The acclerations of the bridge and the maglev car body are both small versus the speed and the maglev train weight, wich indicates that the dynamic performance of the bridge and maglev train are good.
References
Yang Y, Teng NG, Huang XC, Teng YF (2005) Vibration analysis of a simply supported beam traversed by uniform distributed moving mass. J Vib Shock 24(3):19–22
Zeng YW, Wang SH, Zhang KL (1999) A study of vertical coupling dynamics of EMS maglev train and guideway systems. J China Railw Soc 4(2):21–26
Teng YF (2008) The study of vibration of high speed maglev guideway interacting with vehicle. Shanghai Jiao Tong University Doctor Degree Dissertation, pp 12–13
Yuan XB, Zhao X, Fang DH (2010) A new step-by-step integration method based on 3-order hermite interpolation by double-parameter for dynamic response. Eng Mech 10:42–46
Wang SK (1995) Levitation and guidance of a maglev vehicle using optimal preview control. Carnegie Mellon University, Pittsburgh, pp 20–25
Jin S (2003) Study on vibration of the beam of magnetic levitation express railway and it’s control. China Saf Sci J 10:76–80
Liu HK, Zhang X (2010) Maglev control algorithm adapted to variety of track curve. J Syst Simul 22(5):1101–1105
Acknowledgements
This work was supported by Chinese National Natural Science Foundation (51378429, U1434205) and the Key Project of Chinese National Programs for Fundamental Research and Development (973 Program) (2013CB036301).
Open Access
This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
Author information
Authors and Affiliations
Corresponding author
Additional information
Editor: Eryu Zhu
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Li, X., Geng, J. & Wang, D. Dynamic Responses of Low–Medium Speed Maglev Train–Simply Supported Beam Interaction System. Urban Rail Transit 3, 136–141 (2017). https://doi.org/10.1007/s40864-017-0064-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40864-017-0064-2