
Abstract
Western Tasmania, Australia contains some of the highest levels of biological endemism of any temperate region in the world, including vegetation types that are conservation priorities: fire-sensitive rainforest dominated by endemic conifer species in the genus Athrotaxis; and fire-tolerant buttongrass moorlands. Current management focuses on fire suppression, but increasingly there are calls for the use of prescribed fire in flammable vegetation types to manage these ecosystems. The long-term effects of climate and alternative management strategies on the vegetated landscape are unknown. To help identify controls over successional trajectories, we parameterized a spatially explicit landscape-scale model of vegetation and fire (FireBGCv2) for a study area in Cradle Mountain-Lake St Clair National Park in western Tasmania using new data on fine-scale topography, plant communities, and fuels loads. Our parameterized model displays a high level of agreement with previous empirical and modeling studies for the region. The model was experimentally tested for three different levels of ignition suppression (0, 50, and 90 %); simulations ran for 1000 years and were replicated 10 times. The different scenarios yielded distinct fire return intervals, with cascading effects on successional dynamics and vegetation composition. Model results indicate that fire-sensitive endemic conifer rainforest will be restricted to upland refugia that total far less area than its present distribution, even under maximal ignition suppression. Because the distribution of vegetation types was unstable temporally and across stochastic replicates, present distributions may be a legacy of previous climate, Aboriginal fire management, or both.
Similar content being viewed by others
Introduction
Western Tasmania, Australia contains some of the highest levels of biological endemism of any temperate region in the world (Kier et al. 2009), and much of this area is now largely preserved in a United Nations Educational, Scientific, and Cultural Organization (UNESCO) World Heritage Area (WHA). This WHA contains a wide range of vegetation types, including fire-sensitive rainforest dominated by endemic conifer species and fire-tolerant buttongrass moorlands, wet sclerophyll eucalypt forest, and heathlands comprised of taxa with a range of adaptation to fire, including resprouting, serotiny, and fire-resistant bark (Cullen 1987; Read and Hill 1988). These vegetation types are often juxtaposed on the landscape in fine-scale patches. Among surviving Gondwanan rainforests in the southern hemisphere, the Tasmanian rainforests possess the most complex human–fire–vegetation interactions, because they are embedded in a highly flammable landscape whose successional dynamics depend heavily on fire disturbance (Holz and Veblen 2011; McWethy et al. 2013; Holz et al. 2015). Inferences from early European accounts, along with ecological studies, indicate that fire return intervals for western Tasmania prior to European settlement vary from as short as a few years for buttongrass moorland (Marsden-Smedley and Kirkpatrick 2000) to as long as centuries for rainforests (Bowman and Wood 2009).
Aboriginal Australians used fire as a tool for landscape management in Tasmania (Marsden-Smedley 1998), and have lived within the UNESCO World Heritage Area for at least 35,000 years (Thomas 1993). At lowland sites in western Tasmania, human burning was responsible for increased fire frequency during the Holocene, which led to the expansion and maintenance of buttongrass moorland (Fletcher and Thomas 2010). At higher elevations (c. 700–900 m) in Tasmania, Aboriginal burning controlled boundaries between buttongrass moorland and rainforest vegetation (Bowman et al. 2013). Two key ecological findings indicate that this result may not be applicable to sub-alpine sites. First, research has shown that near and beyond treeline, grasslands may have been stable over time due to climate, substrate, and non-anthropogenic fire (Thomas and Hope 1994). Second, diverse vegetation types have persisted throughout the Holocene, despite the climatic potential for rainforest vegetation (Jackson 1968) due to the interplay of fire and climate (Kirkpatrick and Balmer 1991).
It remains unclear how highly fire-sensitive vegetation has been able to persist within a matrix of flammable vegetation. Holocene fire regimes in the sub-alpine zone under Aboriginal management appear to have been patchy and of low severity (Holz et al. 2015). Widespread fires following European colonization threaten endemic fire-sensitive flora, including the species in the Tasmanian endemic conifer genus Athrotaxis (Holz et al. 2015), which are listed as vulnerable on the International Union for Conservation of Nature and Natural Resources’ (IUCN) Red List (The IUCN Red List of Threatened Species 2014). Conservation of sub-alpine Tasmania’s cultural and biological resources has been an international priority for at least 25 years (Brown et al. 1990), and the World Heritage Area contains several National Parks dedicated to the stewardship of this rich biological legacy. Although buttongrass moorland itself is not imperiled, conservation of buttongrass moorlands and the endemic species they harbor has been a priority for at least 35 years (Driessen 2006). Current forest management strategy focuses on fire prevention and suppression to protect human lives and, secondarily, fire-sensitive species (Tasmania Parks and Wildlife Service 1999). Some researchers have suggested that implementing prescribed burning (King et al. 2006), or even deliberately reproducing Aboriginal burning practices (Marsden-Smedley and Kirkpatrick 2000), may help to achieve current conservation goals. There are few data, however, on the long-term fire history of sub-alpine Tasmanian forests, let alone on the nature of Aboriginal burning practices (i.e., seasonality, frequency, severity, etc.). The role for prescribed fire in mitigating large-scale high severity fires in this environment is therefore unclear, and possibly impractical. Questions concerning the stability of a landscape composed of vegetation with mixed responses to fire demand long-term perspectives that are most practically addressed by using a process modeling approach.
Several modeling approaches have contributed to our understanding of sub-alpine vegetation dynamics in sub-alpine Tasmania. Conceptual models describe successional trajectories under different fire regimes (Jackson 1968; Henderson and Wilkins 1975; Mount 1979). Statistical models have been used to evaluate the importance of fire and climate in shaping vegetation in sub-alpine Tasmania (Kirkpatrick and Balmer 1991). Landscape-scale vegetation models have been used to identify locations where plant community composition is contingent upon weather, soils, topography, disturbance, or some combination of those factors (King et al. 2006). Simulation modeling in southwestern Tasmania has suggested that prescribed burning has the potential to preserve rainforest vegetation over time horizons extending to 1000 years (ignoring climate change), but only under mild fire weather conditions (King 2004). During severe fire weather, when fires have the greatest effects and largest spatial extent, prescribed burning was found to have little impact on simulated fire effects for rainforest vegetation. The fine-scale vegetation mosaics of sub-alpine Tasmanian landscapes limit the applicability of models developed in the lowlands of western Tasmania. Here we parameterized FireBGCv2 (Keane et al. 2011) to identify the effects of different levels of ignition suppression on landscape-level patterns of vegetation and successional dynamics in sub-alpine Tasmania.
Materials and methods
Study area
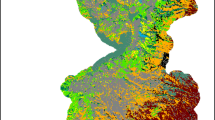
For the present study, we selected a study area of approximately 50,000 ha that surrounds the region around Dove Lake within Cradle Mountain-Lake St Clair National Park, where we collected our field data (Fig. 1). Simulation sites (Fig. 2) were differentiated on the basis of elevation (low <650 m; mid 650–1070 m; high >1070 m), aspect (cool 45°–225°; warm 225°–45°), and dominant current vegetation type (forest, non-forest).

Satellite imagery of the study area. In a, note the simulation area (black outline) surrounding Dove Lake (indicated by the white arrow) in Cradle Mountain-Lake St Clair National Park (white outline), and location in Tasmania, Australia (insets). Circles in b show the locations of plots used to parameterize the model. Source: a CNES/Astrium and Digital Globe, via Google Earth, imagery date 2012-04-13; b Digital Globe, via Google Earth, imagery date 2011-10-18

Map of site types in the simulation landscape. Sites were differentiated by elevation (low, mid, high), aspect (cool, warm), and dominant vegetation type (forest, non-forest)
Cradle Mountain-Lake St Clair National Park (41°49′49″S 145°55′27″E; elevation c. 300–1545 m; see Fig. 1) is part of an extensive upland plateau in western Tasmania. Much of the geological substrate is ancient in origin, including Precambrian mudstone and highly metamorphosed quartzite, as well as Jurassic dolerite. The landscape was substantially altered by Pleistocene glaciation (Kirkpatrick and Balmer 1991), and consequently the topography is rugged, with exposed dolerite bedrock in many areas. Peat forms on all substrates at higher elevations, and in areas with poor drainage at lower elevations (Kirkpatrick and Balmer 1991). Based on the data from the Australian Water Availability Project (Jones et al. 2009), mean annual rainfall in the study area, from 1911 to 2011, was 260.9 cm, and mean annual temperature was 6.50 °C.
Vegetation in the study area is exceptionally diverse, including grasslands dominated by Poa species, sedgelands dominated by Gymnoschoenus, mixed shrublands, wet sclerophyll forests dominated by one of a few species of Eucalyptus (E. coccifera, E. subcrenulata, E. delegatensis, E. nitida, and E. gunnii), and rainforests, including those dominated by Lophozonia species, as well as those dominated by endemic Athrotaxis cupressoides and A. selaginoides (Williams and Potts 1996). Aboriginal Tasmanians used the region seasonally, although the specifics of their fire usage remain unclear (Holz et al. 2015). Herbaceous vegetation types around the Park have been burned from at least the time of early European settlement, and with high frequency until the early 1960s to maintain pastures (Kirkpatrick and Balmer 1991). To the best of our knowledge, however, European settlers did not deliberately burn forested sites considered in this study (Johnson and Marsden-Smedley 2002). Three major fires occurred in the early 20th or late 19th centuries (Kirkpatrick and Balmer 1991), and based on historical sources and mapping, Johnson and Marsden-Smedley identified two extensive wildland fires south and southwest of our study area, mostly likely in 1933–1934, and the early 1950s (Johnson and Marsden-Smedley 2002). Herbaceous vegetation is estimated to have a fire return interval of approximately 13 years (Jarman et al. 1988). For substantial areas, however, especially at higher elevation, there is no evidence of fire after 1890 (Kirkpatrick and Balmer 1991), which is probably the most accurate estimate for our study area.
Climate data
FireBGCv2 uses daily weather data to drive tree growth, mortality, and regeneration. For our simulations, we used 101 years of available daily weather data for western Tasmania from 1911 through 2011, made available through the Australian Water Availability Project (Jones et al. 2009). We applied corrections to each site’s weather data based on elevation, slope and aspect, using the Mountain Climate Simulator (Running et al. 1987; Hungerford et al. 1989). We then repeated the resulting 101-year daily weather records for the duration of the 1000-year simulations (i.e., we ignored past or future climate change).
FireBGCv2 customization
FireBGCv2 includes an individual-tree model of ecological succession, and a spatial fire disturbance model that includes simulation of fire ignition, spread, and effects. The model is described in greater detail elsewhere (Keane et al. 2011), but, briefly, FireBGCv2 is organized around five hierarchical representations of vegetation and landscapes, and simulates process at each of these levels. From finest to coarsest these are the levels of the individual tree, species, stand, site, and landscape. Growth of the individual trees depends on species-specific interactions of solar radiation, temperature, precipitation, and soil moisture. Tree regeneration depends on soil moisture, litter depth (a product of tree growth and decomposition), and seed crop (a product of long-term climate). Ignitions are located randomly across the landscape, and fires start based on the amount and type of fuel present in the stand, as well as the site-level fire frequency probability. Fire spread is determined by wind, slope, and stand-level fuel availability and moisture. Fire spread is further constrained by a random selection from a maximum fire size function, based on the fire return interval and mean fire size for each site. FireBGCv2 is sensitive to custom physiological parameters (see Online Resource 1), which makes this model an appropriate choice for the plant species inhabiting our study area, given its steep climatic gradients and rugged topography.
This study reflects the first attempt to parameterize FireBGCv2 for a landscape in the southern hemisphere in general, and in sub-alpine Tasmania in particular. Like all mechanistic, individual-tree models, FireBGCv2 relies on hundreds of parameters to drive its algorithms. We conducted field work to measure as many of these parameters as was possible. Fifteen vegetation types were identified in the study area, based on previous vegetation mapping (Kitchener and Harris 2013). Fieldwork was conducted using 0.04 ha circular plots. Saplings, mature trees, and species composition were assessed over the entire plot area. Seedlings and understory species were counted by 2 cm diameter class for the 0.004 ha at the center of this plot. All dead, downed, woody debris greater than 5.6 cm in diameter was counted for a 0.01 ha plot centered on the 0.04 ha circular plot. Dead, downed, woody debris smaller than 6.35 cm in diameter was counted in three size classes (<0.635 cm, 0.635 to <2.54 cm, and 2.54 to <6.35 cm) at four 1 m2 plots, located 5 m from the center of the 0.04 ha circular plot in each of the cardinal directions (Keane and Dickinson 2007).
Physiological parameters for the species found in the study area were drawn from many sources (Read and Hill 1985; Cullen 1987; Kirkpatrick 1990; Read 1995; Brodribb and Feild 2000; Blackman et al. 2010; Kirkpatrick et al. 2010; Dean et al. 2011) (see also Online Resource 1 for a complete listing of sources used). Often precise parameters were not available for species of interest, and were inferred from closely related species where empirical observations were available. For example, aboveground and belowground biomass values for the Eucalyptus species in our simulations were inferred from equations in Hamilton et al. (2005) and Resh et al. (2003), based on parameters in Blackman et al. (2010). When physiological parameters were not available for species included in the model, they were drawn from the closest related species in White et al. (2000). Established and demonstrably functional parameters in White et al. (2000) are an effective substitute for physiological parameters that are not available in the primary literature. This technique was used principally for Athrotaxis species, where empirical observations of biomass and allometry were inadequate to parameterize FireBGCv2 entirely empirically. For Athrotaxis biomass, for example, parameters were used from Thuja plicata Donn ex D. Don (Cupressaceae), the closest related species in White et al. (2000), to translate known age-size relationships in Athrotaxis species (Read 1995) into biomass for discrete tree tissues.
Simulation design
Three simulation scenarios test the functionality of the novel FireBGCv2 parameterization in sub-alpine Tasmania. The only variable differentiating simulations is the degree to which model-calculated fire ignitions are suppressed. Fire ignitions in FireBGCv2 are calculated from the user-input fire frequency for each site (Online Resource 1), and the amount of available fuel in each stand, and the input climate data; the simulation scenarios randomly suppress the specified proportion of these ignitions. Fires then proceed based on climate, topography, and fuel availability. The three levels of ignition suppression are 0 (full fire), 50, and 90 % (nearly complete ignition suppression); each level of ignition suppression results in a unique fire regime. Because rainforest tree species in these simulations are extremely long-lived, we ran simulations for 1000 years. While this simulation length is shorter than the maximum lifespan of some of the rainforest species included in the model, it is long enough to allow for their regeneration, growth, and reproduction. This simulation length is also far longer than any estimated fire return interval for the simulation area (Jarman et al. 1988; Kirkpatrick and Balmer 1991). FireBGCv2 is a cumulative effects model that relies on stochastic processes. Because of this, the model is best-suited to assessing long-term trends in ecosystem dynamics, with each scenario averaged over several replicates. To this end, we ran ten replicates of each experimental scenario. Model runs were initiated from a map of current vegetation distributions (Kitchener and Harris 2013).
Output and analysis
To assess the simulated fire regimes we present the number of fires experienced by each pixel in the landscape (Fig. 3). To assess successional trajectories, we present species dominance by cover (Figs. 4, 5, 6). When possible, we present the means of those variables across the ten replicates (Figs. 3, 4, 6). For output variables where such averaging is not possible (i.e., spatial locations of vegetation types over time) we present a series of maps that represent time-slices from what we considered to be the model’s central tendency for that scenario (Fig. 5). In this paper, we define complete temporal stability as a pixel remaining as a single vegetation type for the duration of the simulation. We define complete stochastic stability as a pixel being a single vegetation type for the last 100 years of simulation time over all ten replicate simulations for a single scenario. Figures 5 and 6 demonstrate the temporal and stochastic stability of modeled vegetation, respectively. Data processing and analysis were conducted in the R statistical programming language (R Development Core Team 2008).

Cumulative number of fires experienced by each stand, averaged over ten replicates, for each of three simulation scenarios: no ignition suppression (a), 50 % ignition suppression (b), 90 % ignition suppression (c). Note that each panel has its own legend

Dominant vegetation cover. Each panel is the mean of 10 replicates for three different ignition suppression scenarios: 0 % (a), 50 % (b), and 90 % (c)

Composite of images of dominant species by cover for each 50 year time slice from year 50 to year 1000 of a single randomly selected simulation, for each of three different ignition suppression scenarios: 0 % (a), 50 % (b), and 90 % (c). The legend shows the color for each vegetation type associated with complete temporal stability. Regions where the colors most closely match those in the legend are the least variant. Regions where the colors are muddled indicate greater temporal variability over the course of a simulation

Composites of dominant species by cover near the end of simulations (years 900 and 950), averaged across ten replicates for each of three different ignition suppression scenarios: 0 % (a), 50 % (b), and 90 % (c). The legend shows the color for each vegetation type associated with complete stochastic stability. Regions where the colors most closely match those in the legend are the least variant. Regions where the colors are muddled indicate greater variability in the final condition of the landscape across stochastic replicates
Results
Fire regime
Fire was spatially variable in the model, with stands burning on average a maximum of 49.2 times over a 1000-year simulation (Fig. 3a). Ignition suppression in the model effectively eliminated nearly all fires—under the 90 % ignition suppression scenario, no stand experienced more than two fires over a 1000-year simulation (Fig. 3c). Mean landscape fire return interval was 56.08 years (SD = 10.0) for 0 % ignition suppression, 98.66 years (SD = 23.7) for 50 % ignition suppression, and 564.3 years (SD = 174.7) for 90 % ignition suppression, which are significantly different [F(2, 27) = 68.8, p ≪ 0.001].
Large fire events recurred periodically, and resulted in repeated abrupt successional shifts that were superimposed over the broad successional trends within each scenario (Fig. 4). Each fire event was associated with a decrease in the abundance of all of the modeled tree genera (Eucalyptus, Lophozonia, and Athrotaxis). Each fire was likewise associated with an increase in the abundance of shrublands and, to a lesser extent, buttongrass moorlands.
Maximum ignition suppression was required to increase the abundance of Lophozonia rainforest on a sub-alpine Tasmanian landscape, reflecting the broad environmental tolerances of this tree; no ignition suppression strategy increased the abundance of Athrotaxis rainforest: the species was confined to the coolest, mid-and high-elevation sites. Intermediate levels of ignition suppression maximized the abundance of eucalypt forest on the landscape, and Eucalyptus expansion was possible at all but the coolest, wettest sites. Low levels of ignition suppression maintained the greatest abundance of buttongrass moorland, principally at the warmest, least mesic sites, although moorland was less abundant than the landscape’s initial condition.
Successional trajectories
Ecological succession in the model matches our understanding of the region’s ecology in several ways. In the absence of fire, the amount of time required in the model for vegetation to transition to Lophozonia rainforest is on the order of 500–1000 years (Fig. 4). For the landscape as a whole, eucalypt forests are slowly replaced by other vegetation types over the 1000-year simulations. In a landscape with more fire, shrublands replaces these eucalypt forests; with less frequent fire, Lophozonia rainforest replaces the eucalypt forest. This process is quite slow, taking on the order of centuries. In the scenario with less frequent fire, there is also an initial increase in the abundance of eucalypt forest over the first century of simulation time. This increase comes principally at the expense of shrubland and Athrotaxis rainforest. Many of the intricacies of the successional dynamics are evident in an animation of all of the simulations, available as Online Resource 2.
Regardless of the simulation scenario, small amounts of both Athrotaxis and buttongrass moorland persist on the landscape (Figs. 4, 5, 6). Spatially, however, this persistence is markedly different. Athrotaxis principally only occurs in a few locations, the largest of which is an area of upland plateau to the southwest of Dove Lake. Other smaller patches of persistent Athrotaxis rainforest occur at upland plateaus throughout the simulation area. The buttongrass moorland, on the other hand, occurs transiently in many different areas across the entire simulation time, and across all the scenarios.
The stability of dominant vegetation types varies spatially across the landscape, as well as by scenario. Figure 5 shows the temporal stability of the landscape, and Fig. 6 shows the stability of the landscape for stochastic replicates. The most stable regions occur under no ignition suppression in the northwestern portion of the landscape (Figs. 5a, 6a) and across nearly the entire landscape under 90 % ignition suppression (Figs. 5c, 6c). Stable vegetation types under the no ignition suppression scenario are shrublands and buttongrass moorland, whereas stable vegetation types under 90 % ignition suppression are predominantly Lophozonia rainforest.
Discussion
FireBGCv2 attempts to include both stochastic changes in fire frequency, and plant demography, to help identify patterns of landscape-scale vegetation change in the Tasmanian sub-alpine landscape under contrasting ignition suppression scenarios (Bowman and Wood 2009). Overall, the amount of time required for successional changes to occur agrees with previous estimates of successional trajectories and rates in Tasmanian rainforests (King et al. 2006). Areas of the landscape that show greater variability, either temporally or across stochastic replicates, exhibit greater path dependence (Brown et al. 2005); that is, the state of these regions of the landscape is more dependent on prior conditions and stochastic events. Comparing fire frequencies (Fig. 3) to the stability of dominant vegetation (Figs. 5, 6) reveals that the greatest path dependence in successional dynamics occurs for areas of intermediate fire frequency.
Our model results support the persistence of upland Athrotaxis refugia southwest of Dove Lake, and the stability of shrub-dominated vegetation in the western portion of the simulation landscape (Figs. 5a, 6a). The eastern and central portions of the landscape undergo seral stages from buttongrass through eucalypt forest to rainforest following fire, under the 0 and 50 % ignition suppression scenarios (Figs. 5a, b, 6a, b). This is mostly likely due to the model parameterization, which makes Athrotaxis unsuited to frequent disturbance. Patches of buttongrass that persist for long periods of time occur only under the 0 % suppression scenario (Fig. 5a), which also has the shortest fire return intervals.
Fires appear to be widespread across the simulation landscape in only a few select years. After such fire years there is a pulse in buttongrass distribution, but only a pulse—buttongrass levels almost immediately return to a low level (Fig. 4). Under the scenario with no ignition suppression, there may be a modest trend toward increasing buttongrass abundance on the landscape as a whole (Fig. 4a). Even so, under all scenarios, the persistent distribution of buttongrass on the landscape is much smaller than observed at present. In the model, it is never as extensive in the uplands as modern vegetation mapping indicates.
The limited distribution of buttongrass moorland in the model could be due to the lack of waterlogged soils in the model, which are thought to be important to the long-term persistence of buttongrass moorlands (Kirkpatrick and Balmer 1991), and limit the recruitment and retention of mature trees. It is not possible to parameterize such edaphic factors in FireBGCv2, and this missing component could account for underestimation of the distribution and stability of buttongrass moorlands. That same missing edaphic factor, however, should also contribute to the model overestimating the extent and stability of Athrotaxis-dominated rainforest. By having more land area in the model where trees could potentially grow than exists in reality, the model should have a tendency to overestimate the dominance of all tree species. The area of the landscape dominated by tree species increases only under the 90 % ignition suppression scenario (cf. Fig. 4a–c), which indicates that the model is not consistently projecting a reduced abundance of buttongrass moorland. If waterlogged soils were a key factor missing from the model, we should expect to see a loss of buttongrass moorland with preferential replacement by Athrotaxis in cool upland areas under all scenarios. Instead, we see reductions in the extent of buttongrass moorland under the 50 and 90 % suppression scenarios, and reductions in Athrotaxis rainforest under all scenarios. While the lack of detail in the model regarding soils should be viewed as a limitation of our approach, the model output indicates that something other than edaphic factors is reducing the extent of both buttongrass moorland and Athrotaxis rainforest.
Although the extremely limited ranges of species like buttongrass and Athrotaxis are stable for up to a millennium in the model, this is an exception on the simulation landscape. The majority of the landscape appears to be temporally dynamic at all levels of fire frequency, except for extremely high or extremely low fire frequency. In this sense, the landscape in Cradle Mountain-Lake St Clair National Park has not reached a dynamic fire-vegetation equilibrium, an observation that agrees with the findings of other high resolution fire-vegetation simulation modeling in Tasmania (King 2004). Regardless of the ignition suppression scenario, the model takes centuries for vegetation to equilibrate to a particular fire regime, and the new equilibrium never matches the initial conditions. Both of these points indicate that the landscape as it currently exists is not in equilibrium with the present climatic potential. As climate changes in the future, we should expect further destabilization of the vegetation in this landscape.
Under the scenarios we provide here, endemic conifer species persisted in upland areas for centuries. This persistence was accompanied by an attenuation of endemic conifer dominance in lowland areas, although the appearance of transient patches of Athrotaxis in upland areas indicates that the species is not dispersal-limited in the model. We interpret the persistence of Athrotaxis in restricted upland areas as indication that the majority of the simulation landscape is unsuitable habitat for Athrotaxis over centennial time scales. Upland persistence and lowland attenuation occur regardless of the scenario, indicating that, barring climatic change, endemic conifer conservation is unlikely to depend on fire management in this region. Because fire ignition and spread are determined probabilistically by the overall fire return interval, climate, and available fuel, it is not possible to simulate prescribed individual fires in FireBGCv2. Directly simulating fires like those that swept through the Central Plateau, east of our study area, in 1898, 1934, and 1961, is therefore not within the scope of FireBGCv2. Nevertheless, fires that result in widespread losses of Athrotaxis, like those observed historically in the Central Plateau (Holz et al. 2015), are common and recurrent in the simulations we presented here. It remains a possibility that the greater abundance of Athrotaxis during the mid-Holocene (Florin 1963; Hill and Carpenter 1991), and its current decline (Fletcher et al. 2013), are a result of long-term climatic trends and current regional warming and drying trends associated with anthropogenic climatic changes. Losses of Athrotaxis could be due to these broad climate shifts, both in reality and in our model.
Future simulations with this newly developed version of FireBGCv2 will help us to address the role of changing climate in influencing this region’s vegetation. Land managers would be well-advised to prepare for substantial shifts in vegetation in the Cradle Mountain-Lake St Clair National Park landscape in the future. Further research should be undertaken to indicate what possible future conditions may occur on this landscape, and whether prior Aboriginal fires impacted current vegetation patterns in the study area. The model results that we present here, however, should assist land managers seeking to prioritize their conservation goals and identify fire management best practices in sub-alpine Tasmania.
Data accessibility
The data for this paper are archived with the USDA Forest Service, and available by ftp upon request.
References
Blackman CJ, Brodribb TJ, Jordan GJ (2010) Leaf hydraulic vulnerability is related to conduit dimensions and drought resistance across a diverse range of woody angiosperms. New Phytol 188:1113–1123
Bowman DM, Wood SW (2009) Fire-driven land cover change in Australia and WD Jackson’s theory of the fire ecology of southwest Tasmania. In: Cochrane MA (ed) Tropical fire ecology. Springer, Berlin, pp 87–111
Bowman D, Wood SW, Neyland D, Sanders GJ, Prior LD (2013) Contracting Tasmanian montane grasslands within a forest matrix is consistent with cessation of Aboriginal fire management. Austral Ecol 38:627–638
Brodribb TJ, Feild TS (2000) Stem hydraulic supply is linked to leaf photosynthetic capacity: evidence from New Caledonian and Tasmanian rainforests. Plant Cell Environ 23:1381–1388
Brown MJ, Jarman SJ, Grant J, Corbett K, Kantvilas G (1990) Tasmanian rainforest communities: their description, environmental relationships and conservation status. Tasmanian Rainforest Research. Tasmanian NRCP Report No. 1:3–11
Brown DG, Page S, Riolo R, Zellner M, Rand W (2005) Path dependence and the validation of agent-based spatial models of land use. Int J Geogr Inf Sci 19:153–174
Cullen PJ (1987) Regeneration patterns in populations of Athrotaxis selaginoides D. Don. from Tasmania. J Biogeogr 14(1):39–51
Dean C, Fitzgerald NB, Wardell-Johnson GW (2011) Pre-logging carbon accounts in old-growth forests, via allometry: an example of mixed-forest in Tasmania, Australia. Plant Biosyst Int J Dealing Asp Plant Biol 146:223–236
Driessen M (2006) Buttongrass moorland: a world heritage ecosystem. Tasman Nat 128:37–51
Fletcher M-S, Thomas I (2010) The origin and temporal development of an ancient cultural landscape. J Biogeogr 37:2183–2196
Fletcher M-S, Wolfe BB, Whitlock C, Pompeani DP, Heijnis H, Haberle SG, Gadd PS, Bowman DM (2013) The legacy of mid-Holocene fire on a Tasmanian montane landscape. J Biogeogr 41:476–488
Florin R (1963) The distribution of conifer and taxad genera in time and space. Acta Horti Bergiani 20:121–312
Hamilton SD, Brodie G, O’Dwyer C (2005) Allometric relationships for estimating biomass in grey box (Eucalyptus microcarpa). Aust For 68:267–273
Henderson W, Wilkins CW (1975) Interaction of bushfires and vegetation. Search 6:130–133
Hill RS, Carpenter RJ (1991) Extensive past distributions for major Gondwanic floral elements: macrofossil evidence. In: Papers and proceedings of the royal society of Tasmania, pp 239–247
Holz A, Veblen TT (2011) The amplifying effects of humans on fire regimes in temperate rainforests in western Patagonia. Palaeogeogr Palaeoclimatol Palaeoecol 311:82–92
Holz A, Wood SW, Veblen TT, Bowman DMJS (2015) Effects of high-severity fire drove the population collapse of the subalpine Tasmanian endemic conifer Athrotaxis cupressoides. Glob Change Biol 21:445–458
Hungerford RD, Nemani RR, Running SW, Coughlan JC (1989) MTCLIM: a mountain microclimate simulation model. US Department of Agriculture, Forest Service, Intermountain Research Station Ogden, Utah
Jackson WD (1968) Fire, air, water and earth—an elemental ecology of Tasmania. Proc Ecol Soc Aust 3:16
Jarman SJ, Kantvilas G, Brown MJ (1988) Buttongrass moorland in Tasmania. Tasmanian Forest Research Council
Johnson K, Marsden-Smedley JB (2002) Fire history of the northern part of the Tasmanian Wilderness World Heritage Area and its associated regions. In: Papers and proceedings of the royal society of Tasmania, pp 145–152
Jones DA, Wang W, Fawcett R (2009) High-quality spatial climate data-sets for Australia. Aust Meteorol Oceanogr J 58:233
Keane RE, Dickinson LJ (2007) The photoload sampling technique: estimating surface fuel loadings from downward-looking photographs of synthetic fuelbeds. US Department of Agriculture, Forest Service, Rocky Mountain Research Station
Keane RE, Loehman RA, Holsinger LM (2011) The FireBGCv2 landscape fire succession model: a research simulation platform for exploring fire and vegetation dynamics. US Department of Agriculture, Forest Service, Rocky Mountain Research Station
Kier G, Kreft H, Lee TM, Jetz W, Ibisch PL, Nowicki C, Mutke J, Barthlott W (2009) A global assessment of endemism and species richness across island and mainland regions. Proc Natl Acad Sci 106:9322–9327
King KJ (2004) Four analyses of computer simulations investigating fire–vegetation interactions and fire management options in southwest Tasmania. Australian National University, Canberra
King KJ, Cary GJ, Bradstock RA, Chapman J, Pyrke A, Marsden-Smedley JB (2006) Simulation of prescribed burning strategies in south-west Tasmania, Australia: effects on unplanned fires, fire regimes, and ecological management values. Int J Wildland Fire 15:527–540
Kirkpatrick JB (1990) A synusia-based mapping system for the conservation management of natural vegetation, with an example from Tasmania, Australia. Biol Conserv 53:93–104
Kirkpatrick JB, Balmer J (1991) The vegetation and higher plant flora of the Cradle Mountain-Pencil Pine area, northern Tasmania. In: Papers and proceedings of the royal society of Tasmania, pp 119–137
Kirkpatrick JB, Bridle KL, Dickinson KJM (2010) Decades-scale vegetation change in burned and unburned alpine coniferous heath. Aust J Bot 58:453–462
Kitchener A, Harris S (2013) From forest to fjaeldmark: descriptions of Tasmania’s vegetation, 2nd edn. Department of Primary Industries, Parks, Water and Environment, Hobart, Tasmania, Australia
Marsden-Smedley JB (1998) Changes in southwestern Tasmanian fire regimes since the early 1800s. In: Papers and proceedings of the royal society of Tasmania, pp 15–29
Marsden-Smedley JB, Kirkpatrick JB (2000) Fire management in Tasmania’s Wilderness World Heritage Area: ecosystem restoration using Indigenous-style fire regimes? Ecol Manag Restor 1:195–203
McWethy DB, Higuera PE, Whitlock C, Veblen TT, Bowman D, Cary GJ, Haberle SG, Keane RE, Maxwell BD, McGlone MS (2013) A conceptual framework for predicting temperate ecosystem sensitivity to human impacts on fire regimes. Glob Ecol Biogeogr 22:900–912
Mount AB (1979) Natural regeneration processes in Tasmanian forests. Search 10(5):180–186
R Development Core Team (2008) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna
Read J (1995) The importance of comparative growth rates in determining the canopy composition of Tasmanian rainforest. Aust J Bot 43:243–271
Read J, Hill RS (1985) Photosynthetic responses to light of Australian and Chilean species of Nothofagus and their relevance to the rainforest dynamics. New Phytol 101:731–742
Read J, Hill RS (1988) The dynamics of some rainforest associations in Tasmania. J Ecol 76:558–584
Resh SC, Battaglia M, Worledge D, Ladiges S (2003) Coarse root biomass for eucalypt plantations in Tasmania, Australia: sources of variation and methods for assessment. Trees Struct Funct 17:389–399
Running SW, Nemani RR, Hungerford RD (1987) Extrapolation of synoptic meteorological data in mountainous terrain and its use for simulating forest evapotranspiration and photosynthesis. Can J For Res 17:472–483
Tasmania Parks and Wildlife Service (1999) Tasmania Wilderness World Heritage Area Management Plan 1999
The IUCN Red List of Threatened Species (2014). http://www.iucnredlist.org/. Accessed 19 May 2014
Thomas I (1993) Late Pleistocene environments and Aboriginal settlement patterns in Tasmania. Aust Archaeol 36:1–11
Thomas I, Hope G (1994) An example of Holocene vegetation stability from Camerons Lagoon, a near treeline site on the Central Plateau, Tasmania. Aust J Ecol 19:150–158
White MA, Thornton PE, Running SW, Nemani RR (2000) Parameterization and sensitivity analysis of the BIOME-BGC terrestrial ecosystem model: net primary production controls. Earth Interact 4:1–85
Williams KJ, Potts BM (1996) The natural distribution of Eucalyptus species in Tasmania. Tasforests 8:39–165
Acknowledgments
The authors acknowledge no conflicts of interest in this publication.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

{kind=link}
Cite this article
Yospin, G.I., Wood, S.W., Holz, A. et al. Modeling vegetation mosaics in sub-alpine Tasmania under various fire regimes. Model. Earth Syst. Environ. 1, 16 (2015). https://doi.org/10.1007/s40808-015-0019-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40808-015-0019-0