
Abstract
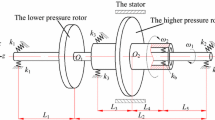
In order to understand the mechanism of fixed-point rub-impact in aero-engine, a dual-rotor system with inter-shaft bearing able to describe the mechanical vibration caused by unbalance and fixed-point rub-impact is developed in this paper. Firstly, a finite element (FE) model of the dual-rotor based on Timoshenko beam element and disk element is proposed, in which the effects of gyroscopic moments, rotary inertias, bending and shear deformations are taken into account. A rub-impact model is developed to derive the rubbing force between the rotor and fixed limiter, in which the softening characteristics of coating painted in casing is fully taken into account. Moreover, the Coulomb model is applied to describe the frictional behaviors. Secondly, the governing equations to describe the motion of the dual-rotor system with rub-impact are solved numerically by the Runge-Kutta method, and the dynamic characteristics are investigated by 3D water-fall plots and frequency spectrum. Combined harmonic frequency, whirling frequency and rotational frequency components of dual rotors are observed. Finally, the experiments of fixed-point rub-impact are performed on a dual-rotor test bench. Good agreement between the theoretical and experimental results shows the accuracy of the dual-rotor FE model and rub-impact model. The results indicate that (1) first backward whirling and forward whirling are excited under the influence of unbalance force; (2) several combination frequency components and second backward whirling and forward whirling frequency components are presented under fixed-point rubbing condition.












Similar content being viewed by others

References
Varney P, Green I (2015) Nonlinear phenomena, bifurcations, and routes to chaos in an asymmetrically supported rotor–stator contact system. J Sound Vib 336(336):207–226
Muszynska A (1989) Rotor-to-Stationary Element Rubbing-Related Vibration Phenomena in Rotating Machinery-Literature Survey. Shock & Vibration Digest 21(3):3–11
Isaksson J, Frid A (1999) Analysis of dynamical behaviour of a rotor with deflection limiters. Acta Mech 133(1–4):1–11
Shaw SW (1985) The Dynamics of a Harmonically Excited System Having Rigid Amplitude Constraints, Part 1: Subharmonic Motions and Local Bifurcations. J Appl Mech 52(2):453–458
Shaw SW (1985) The Dynamics of a Harmonically Excited System Having Rigid Amplitude Constraints, Part 2: Chaotic Motions and Global Bifurcations. J Appl Mech 52(2):453–464
Chu F, Zhang Z (1998) Bifurcation and chaos in a rub-impact Jeffcott rotor system. J Sound Vib 210(1):1–18
Choi YS (2002) Investigation on the whirling motion of full annular rotor rub. J Sound Vib 258(1):191–198
Han Q, Zhang Z, Wen B (2008) Periodic motions of a dual-disc rotor system with rub-impact at fixed limiter. AR-CHIVE Proceedings of the Institution of Mechanical Engineers Part C Journal of Mechanical Engineering Science 1989-1996 222(10):1935–1946
Ma H, Shi C, Han Q et al (2013) Fixed-point rubbing fault characteristic analysis of a rotor system based on contact theory. Mech Syst Signal Process 38(1):137–153
Ma H, Wu Z, Tai X et al (2014) Dynamic characteristics analysis of a rotor system with two types of limiters. Int J Mech Sci 88:192–201
Behzad M, Alvandi M, Mba D et al (2013) A finite element-based algorithm for rubbing induced vibration prediction in rotors. J Sound Vib 332(21):5523–5542
Ma H, Zhao Q, Zhao X et al (2015) Dynamic characteristics analysis of a rotor–stator system under different rubbing forms. Appl Math Model 39(8):2392–2408
Shen X, Jia J, Zhao M (2007) Numerical Analysis of a Rub-impact Rotor-bearing System with Mass Unbalance. J Vib Control 13(12):1819–1834
Hu L, Liu Y, Zhao L et al (2016) Nonlinear dynamic response of a rub-impact rod fastening rotor considering nonlinear contact characteristic. Arch Appl Mech 86(11):1869–1886
Chang-Jian CW, Chen CK (2009) Chaos of rub–impact rotor supported by bearings with nonlinear suspension. Tribol Int 42(3):426–439
Wang N, Jiang D, Yang Y et al (2016) Study on the diagnosis of rub-impact fault based on finite element method and envelope demodulation. Journal of Vibroengineering 18(7):4500–4512
Wang NF, Jiang DX, Han T (2016) Dynamic characteristics of rotor system and rub-impact fault feature research based on casing acceleration. Journal of Vibroengineering 18(3):1525–1539
Tai X, Ma H, Liu F et al (2015) Stability and steady-state response analysis of a single rub-impact rotor system. Arch Appl Mech 85(1):133–148
Yuan Z, Chu F, Wang S et al (2007) Influence of rotor’s radial rub-impact on imbalance responses. Mechanism & Machine Theory 42(12):1663–1667
Popprath S, Ecker H (2007) Nonlinear dynamics of a rotor contacting an elastically suspended stator. J Sound Vib 308(3–5):767–784
Zhao Q, Yao H, Xu Q et al (2015) Prediction method for steady-state response of local rubbing blade-rotor systems. J Mech Sci Technol 29(4):1537–1545
Qin Z, Han Q, Chu F (2016) Bolt loosening at rotating joint interface and its influence on rotor dynamics. Eng Fail Anal 59:456–466
Qin ZY, Han QK, Chu FL (2014) Analytical model of bolted disk–drum joints and its application to dynamic analysis of jointed rotor. Proc Inst Mech Eng C J Mech Eng Sci 228(4):646–663
Roques S, Legrand M, Cartraud P et al (2010) Modelling of a rotor speed transient response with radial rubbing. J Sound Vib 329(5):527–546
Guskov M, Sinou JJ, Thouverez F et al (2014) Experimental and Numerical Investigations of a Dual-Shaft Test Rig with Intershaft Bearing. International Journal of Rotating Machinery 2007(2):308–321
Ferraris G, Maisonneuve V, Lalanne M (1996) Prediction of the dynamic behavior of non-symmetrical coaxial co- or counter-rotating rotors. J Sound Vib 195(4):649–666
Childs DW (1976) A Modal Transient Rotordynamic Model for Dual-Rotor Jet Engine Systems. J Manuf Sci Eng 98(3):876–882
Wang N, Jiang D, Hongzhi X Dynamic characteristics analysis of a dual-rotor system with inter-shaft bearing. Proceedings of the Institution of Mechanical Engineers Part G Journal of Aerospace Engineering. https://doi.org/10.1177/0954410017748969
Han QK, Luo HT, Wen BC (2009) Simulations of a Dual-Rotor System with Local Rub-Impacts Based on Rigid-Flexible Multi-Body Model. Key Eng Mater 413-414:677–682
Sun C, Chen Y, Hou L (2016) Steady-state response characteristics of a dual-rotor system induced by rub-impact. Nonlinear Dynamics 86(1):1–15
Jiang D, Wang N (2018) Vibration response characteristics of a dual-rotor with unbalance-misalignment coupling faults: Theoretical analysis and experimental study. Mechanism & Machine Theory 125:207–219
Wang N, Xu H, Jiang D (2016) Dynamic Model and Fault Feature Research of Dual-Rotor System with Bearing Pedestal Looseness. Math Probl Eng 2016(2):1–18
Yang J, He SZ, Wang LQ (2004) Dynamic Balancing of a Centrifuge: Application to a Dual-Rotor System with Very Little Speed Difference. J Vib Control 10(10):1029–1040
Wang N, Jiang D, Behdinan K (2017) Vibration response analysis of rubbing faults on a dual-rotor bearing system. Arch Appl Mech:1–17
Chiang HWD, Hsu CN, Tu SH (2004) Rotor-Bearing Analysis for Turbomachinery Single- and Dual-Rotor System. J Propuls Power 20(6):1096–1104
Acknowledgments
The project is supported by the National Natural Science Foundations of China (No. 11572167). We would like to thank China Scholarship Council for support.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
There is no conflict of interests in regard to publish of the paper.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The stiffness matrix of the Timoshenko beam element:
The translational inertial matrix of the Timoshenko beam element:
The rotational inertial matrix of the Timoshenko beam element:
The gyroscopic matrix of the Timoshenko beam element:
where As is effective shear area, A is the cross-sectional area, E is elastic modulus, I is the second moment of area of the cross section about the neutral plane, G is shear modulus, l is the length of beam element, D and d are outer diameter and inner diameter, respectively.
Rights and permissions
About this article

Cite this article
Wang, N., Jiang, D. & Xu, H. Effects of Rub-Impact on Vibration Response of a Dual-Rotor System-Theoretical and Experimental Investigation. Exp Tech 44, 299–311 (2020). https://doi.org/10.1007/s40799-019-00352-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40799-019-00352-w