
Abstract
Purpose of Review
Winch-assist systems have seen rapid development, adoption, and implementation in many parts of the world in the past decade and can be considered one of the major recent innovations in steep terrain harvesting. Though a comparatively young topic, the literature around this topic has grown considerably during the last decade. This review summarizes the present body of literature on winch-assist systems and provides a comprehensive introduction to the topic.
Recent Findings
The analysis showed that work safety in steep terrain harvesting operations has increased through winch-assist systems by removing workers from the many hazards of manual and motor-manual work. The extent of rutting, subsequent erosion, and soil densification after working with winch-assist systems was found to be similar to operations on gentle terrain or cable logging. Winch-assist harvesting is considered more productive than conventional steep terrain harvesting. While case studies provide indicative utilization and productivity values, a robust understanding of economic viability under varied stand and terrain conditions is not yet well established.
Summary
Winch-assist is proving to be a robust, safe, and high-performance forest harvesting technology that has increased the operating range of ground-based, mechanized harvesting. It can help increase access to forest grounds in steep terrain that are previously considered economically marginal for forest management. Besides steep terrain, the potential benefits of winch-assist in reducing soil disturbance from ground-based equipment indicate that its operating range can also expand to gentle terrain where environmental impacts are of great concern due to wet or unstable soils. As the technology is relatively young and still evolving, there are many unknown social, environmental, and economic challenges and opportunities associated with the winch-assist technology. More research is certainly warranted.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Over the last 20 years, the level of mechanization of timber harvesting on steep slopes has drastically increased with the advent of winch-assist technology. Winch-assist was developed to overcome the physical feasibility challenges of operating machines on steep slopes [1, 2]. Specifically, it helps improve machine traction and reduce wheel or track slip by transferring a share of the propulsive or braking force from the wheels or tracks to the winch cable that is attached to an anchor in upslope direction [2, 3]. Although improved trafficability and soil protection were the initial driver of winch-assist technology development, its potential benefits in reducing costs and improving worker safety have become the major driver of recent and widespread adoption of this technology in many regions around the world.
The term “winch-assist” has been used interchangeably with others, such as “tethered,” “cable-assist,” and “traction-assist.” The term “tether” is typically not preferred as it by definition is “to restrict,” whereas winch-assist is purposely to expand the operating range rather than restrict it [4]. The development of a new ISO standard [5] makes a clear distinction between traction-assist and winch-assist. Traction-assist provides support only during movement of machinery where machinery is supposed to be fully stable without assist while in a stationary position. Conversely, winch-assist is used to provide access to terrain that the machine cannot reach by itself. The term “cable-assist” found favor in that the common timber extraction system for steep terrain is universally referred to as cable logging. While the difference in definition exists between traction- and winch-assist, there is no clear distinction among various terms in the context of actual operations. Throughout this paper, however, the term “winch-assist” is used to refer to the use of winch systems to stabilize and assist forest equipment operations on steep slopes.
While winches have been used to pull vehicles up slopes since their inception, the original idea of purpose-built, integrated winch systems may date back to military experiments in the 1950s [6]. Experiments with winch-assist machines in forestry were reported as early as 1978 [7, 8], whereby development focused on increasing the terrain capability of forwarders to match the climbing ability of harvesters on steep terrain. Records showed early system trials in the 1980s and 1990s [6, 9], with the first machines becoming available in the 1990s [3]. A surge in development and implementation occurred around the beginning of the new millennium [10]. For example, an early commercialization effort for winch-assist technology was made by a Switzerland-based company, Herzog Forsttechnik AG, who built a prototype steep terrain forwarder in 1999 [11,12,13,14].
European manufacturers started to develop and offer similar technology in the early 2000s [11] while further expanding technology applications to harvesters and skidders [15, 16]. Many modern winch-assist systems are equipped with synchronization technology that automatically synchronizes winch speed with the machine speed to ensure smooth movement and operation of forest machinery [12, 13]. European winch-assist technology has been successfully exported to North and South America and many major equipment manufacturers of cut-to-length systems have started equipping machines with integrated winch systems.
In New Zealand, contractors started experimenting with the use of winches to support large tracked excavator-based forestry machines operating on steep slopes [17]. Trinder Engineering developed a purpose-built integrated winch machine “ClimbMax,” and then various winch systems that could be mounted on either bulldozers or excavators [17]. This winch-assist technology quickly expanded from the first purpose-built unit in 2006 to now having four larger scale manufactures of winch-assist equipment in New Zealand [18] that have manufactured more than 270 winch-assist machines as at March 2020, of which 140 have been exported, mostly to Canada, the USA, and Chile ([19]; pers. comm R. Visser).
In North America, the winch-assist technology was first adopted in the Pacific Northwest including British Columbia, Washington, and Oregon after its fast expansion was witnessed in New Zealand during the early 2010s. Since its introduction, the technology has been rapidly adopted by the private sector in the region mainly due to its safety and economic benefits [20••]. Many early winch-assist systems employed in the USA and Canada were mostly imported from Europe and New Zealand, but several domestic equipment manufacturers, such as Summit in the USA and TimberMax in Canada, have emerged to produce winch-assist equipment and meet a high regional demand in North America. However, operations on public lands in the USA show a slow adoption of technology because of rules and regulations previously established for environmental protection prohibit the use of heavy equipment in steep terrain [21]. This was due to a lack of knowledge of winch-assist’s potential risks and benefits and there has been significant need for research on soil and water impact of this new logging technology for better understanding [22••].
Winch-assist technology comes in a variety of design options. Visser and Harrill [4] classify winch-assist systems by carrier base (wheeled or tracked), type of anchor (bulldozer, excavator, tree or stump), and winch system. Ellegard [23] suggested the terms “dynamic” and “passive” systems. In a dynamic system, the winch system is mounted to another piece of equipment, such as a bulldozer or excavator that provides power to the winch and also acts as an anchor. Since the winch is stationary with the base anchor machine, the cable attached to the working equipment (e.g., felling or forwarding machines) constantly moves on the ground as the equipment moves up and down the hill. Contrarily, in the passive system, the winch is mounted on the working machine instead of an anchor machine, making the cable line static on the ground. With respect to the location of the winch, Amishev [3] refers to these two systems as “anchor machine” and “integrated” systems. Weise [14] further categorizes the passive systems into “integrated” (winch is built into the machine) and “bolt-on” (winch is attached to the machine and can be easily detached), while he uses the term “autonomous systems” for the dynamic system.
Schaare et al. [24] note that the dynamic system requires two machines (i.e., harvesting equipment and anchor machine) along with their seamless communication for effective winch operation, while only one machine is required in a passive system. Anchor machines used in a dynamic system can be easily paired with a variety of harvesting, forwarding, or skidding machines. They can also be readily mobilized as the base machine is equipped with a powertrain. However, they can only serve one harvesting machine at a time. On the contrary, winches in a passive system usually have limited versatility as either they are fully integrated into a felling or forwarding machine, or they can only work with compatible machines in case they are detachable.
For anchor position, dynamic systems typically require machine access to the top of the harvest unit for location of the anchor machine. Passive systems can use trees or stumps to secure the working machine. As the winch is integrated into the working machine in a passive system, the equipment might be heavier and require higher horsepower to provide sufficient power to both the winch system and the working machine. In dynamic systems the wire rope is being pulled along the ground and might experience greater wear, whereas in a passive system, the rope is being laid out and rolled up. Conversely, in passive systems, more localized damage might occur as bending forces exposed to dynamic loading at points of inflection either along the ground or around a stump or tree. Additionally, the acquisition costs are much higher in the dynamic system and relocation and maintenance of two machines require extra effort in terms of costs and capacities.
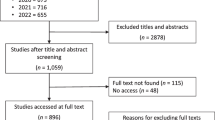
A review paper on developments in steep slope harvesting was published by Visser and Stampfer [2] in which they conclude that winch-assist technology is probably a major step-change in steep terrain harvesting in terms of the ability to operate on steep slopes and avoid soil-damaging slip. However, the paper also states that “the actual implementation, and understanding of its limitations, is in their infancy.” The body of literature that improves our understanding on the operational benefits of the systems, their operating range, safety concerns, and environmental performance has grown significantly during the last 5 years. This paper aims to summarize the most significant findings in research regarding winch-assist systems during the last 5 years. The specific foci are (1) safety and operability, (2) environmental impacts, and (3) system productivity. The review was conducted primarily by searching for peer-reviewed literature using Scopus, Web of Science, and Goggle Scholar and the keywords “winch-assist,” “tethered,” “cable-assist,” and “traction-assist.” For documents not published in scientific journals, the authors were contacted for additional information and materials.
Safety and Operability
Mechanized harvesting systems are generally reported to be much safer compared with non-mechanized systems. For example, Bell [25] recognized that workers’ compensation injury claims rates from logging companies in West Virginia decreased after beginning to use feller bunchers for harvesting operations. Bonauto et al. [26] also analyzed the injury rates of non-mechanized and mechanized harvesting operations and Washington State worker’s compensation claims related to forestry between 2005 and 2014. Claim rate, claim severity, and medical costs per full-time equivalent were significantly higher and traumatic injuries were more frequent in non-mechanized harvesting operations. It is anticipated therefore that increasing use of winch-assisted machinery can decrease injury rates by replacing manual or motor-manual work such as felling or choker setting.
This potential safety benefit has been recently evidenced by trends in fatal injury rates in the USA and New Zealand. According to Worksafe New Zealand [27], the number of logging accidents and fatal injuries has decreased since the introduction of winch-assisted machinery in New Zealand. A recent study indicated that winch-assist mechanized harvesting was able to reduce the type of hazards faced by workers and the number of workers exposed to the hazardous tasks in felling and yarding in Oregon [20].
As winch-assist technology has become widespread only recently, it is difficult to assess if this system brings additional hazards. However, additional hazards could include machine tip over or rollover caused by failures of the anchors, failures of steel cables, or the slope itself with the machine in a compromised position [20, 28]. In addition, performing machine maintenance and repair tasks on steep slopes could potentially bring new hazards to machine operators [20].
Equipment manufacturers usually offer their suggestions for operational slope limits. For example, Haas GmbH & Co. KG suggests a 50% slope limit [29] and Komatsu 55% [30]. However, it is known that at times contractors operate their machines well above these limits (e.g., [31,32,33]). Theoretical calculations have shown that under good ground conditions (e.g., dry and firm soil with a high coefficient of traction), and with purpose-built steep slope machines supported by winch-assist, slopes of up to 100% can be traversed [2]. Sessions et al. [34••] also used a theoretical model for machine stability and traction to evaluate the relationship between equipment specifications and soil and site conditions. They demonstrated that (1) deeper grousers, (2) higher cable tensions, (3) wider tracks, and (4) uphill boom orientation all increase gradeability and stability during operation. Soil properties and moisture condition could also highly influence machine stability and therefore safety. Belart et al. [35] showed that greater soil moisture increases machine stability in sandy loams, but significantly decreases stability in clay loams. Garland et al. [20] further note that a competent and experienced operator is vital for safe practice on very steep slopes.
In scenarios where winch-assist equipment is used on slopes where they are not able to stop in full control without tension on the cable, failures of the wire rope or anchors may lead to severe accidents. Several studies and publications have investigated the tensile forces in the wire rope. Such studies include monitoring if the tensile forces exceed safe working load (SWL) during operations (e.g., [6, 18, 24, 31,32,33, 36]). SWL is the minimum breaking strength (MBS) of the steel cable divided by a safety factor (SF). The new ISO standard suggests a SF of 2 for traction-assist, whereas the New Zealand Code of Practice [37] requires a SF of 3 for winch-assist. The SF of 3 has been widely adopted in North America as this is consistent with the SF required for cable logging operations [38].
First published measurements on tensile force were carried out in New Zealand on excavator-based felling and bunching machines [6, 24, 36]. Holzleitner et al. [31] developed a scientific approach for measuring tensile forces of winch-assisted machinery. Mologni et al. [32] measured tensile forces of large winch-assisted forwarders in British Colombia using the same measurement equipment. One year later, Holzfeind et al. [33] continued measuring tensile forces of winch-assisted forwarders but with focus on amplitudes and durations of occurring peaks. Exceedances of SWL can occur and have been recorded during these trials. For example, Holzfeind et al. [33] reported that an operator-caused mistake led to a failure of the steel cable at 82.7% of the rated MBS.
If using natural anchors, besides the vitality and tree species, machine operators often use the diameter at breast height (DBH) to predict the anchoring strength of a tree. Thereby, studies on cable yarding are frequently used, in which relationships between the force that a tree can withstand and the DBH are provided (e.g., [39, 40]). Also, Marchi et al. [28] demonstrated that a prediction of the load-carrying capacity of a tree is possible, but stated that DBH is a limited predictor by itself. Rather, they concluded that measuring the root plate rotations and their correlations with usual allometric predictors are much better to predict load-carrying capacity. Lyons et al. [41] explored a three-stump anchor system for the cases when a single stump was not strong enough to provide an anchor, and highlighted the importance of balancing the load on the stumps when using multiple stumps.
In comparison to tree and stump anchors, mobile anchors are considered a more convenient and reliable anchoring device if machine access is readily available. Early failure of a mobile anchor typically results only in a shift of the anchor that relieves at least some of the cable loading and, on modern systems, raises an alarm to the operator. Catastrophic failures of such mobile anchors are rare; they are more likely to occur when stumps, trees, or plate anchors are pulled out of the ground [42]. Also, the assessment of stability of mobile anchors is less plagued by uncertainties. Leshchinsky et al. [42] presented an analytical design for mobile anchors, namely bulldozer- and excavator-based ones, which facilitated calculation of anchoring capacity by normalized design charts that also accounted for the danger of sliding and overturning. Anchoring capacity increased with (1) higher soil strength, (2) positioning of the mobile anchor downslope, so its weight supports resistance to anchor pull, (3) a decreased cable angle in comparison to slope grade, thereby applying downward pressure on the mobile anchor, (4) deeper embedment of the equipment (blade, shovel, tracks etc.), and (5) increased equipment weight.
Besides scientific research, there are also different rules, approved codes of practice, and best practice guidelines published by different manufacturers or organizations. Recently, Cavalli and Amishev [43] provided an overview of these different safety measures. Examples include FPInnovations’ Best Practice manual for winch-assisted harvesters [44] or forwarders [45] and a wire rope inspection guide [46]. Oregon’s OSHA has produced a tethered logging guideline [21], and the SHARP program published also best management and operating practices for steep slope machine logging [47, 48].
Environmental Impacts
Soil compaction, soil displacement, and rutting are undesired effects of heavy forestry machinery traffic over forest soils [49]. Winch-assisted machinery can reduce slip during machine traffic. Thereby, undesired adverse effects on the soil, foremost excessive rutting and subsequently erosion by digging-in of the wheels or tracks, can be avoided. Moreover, winch-assist can help reduce the eccentricity of the machine, and thus increase effective track length and decrease maximum ground pressures for a given slope [34]. On sloped terrain, steeper gradients can be accessed by machines without causing excessive additional damage to the soil [50•].
The potential of winch-assist in reducing soil disturbance of ground-based harvesting systems has been recognized early on [11, 12, 51]. Wratschko [11] reported that rut depth increased with slope after forwarder extraction on gently sloped terrain (22–36%), but it was significantly lower with winch-assist (9.3 ± 4.2 cm) than without (19.3 ± 7.9 cm). His study showed that winch-assist reduced wheel slip by about 30%, and soil penetration resistance did not vary between before and after machine traffic or between traffic with and without winch-assist. A Canadian study [52•] found soil disturbance to be lower when using a winch-assisted skidder on steep slope (70%) compared with the skidder on flat terrain on a similar soil type.
Green et al. [22] compared the effects of harvester and forwarder operations on forest soils with and without winch-assist in a field experiment. Soil bulk density was measured from the surface soil, and penetration resistance was measured at multiple soil depths in and outside machine track and between tracks before and after machine traffic. They observed a general increase in soil penetration resistance in the case of without winch-assist, both post-harvester and post-forwarder. However, with winch-assist, they found soil loosening (i.e., decrease in soil bulk density and penetration resistance) that occurred post-harvester and observed less and limited areas of soil densification after forwarder passes compared to without winch-assist.
Garren et al. [50] conducted a similar field experiment in Brazil with a forwarder operating on slopes ranging from 51 to 78%, and quantified the changes in soil properties caused by machine traffic. They found that soil bulk density significantly increased on low slopes, but did not increase on steeper slopes, confirming the effectiveness of winch-assist in reducing concentrated ground pressures. The authors concluded that both bulk density and rut depth levels compared favorably with ground-based operations on gentle slopes. Thus, winch-assist enables fully mechanized harvesting operations on steep slopes with soil impacts similar to gentle ground.
No matter whether it is compaction or loosening, excessive soil disturbance and change in soil physical structure may possibly increase soil erosion and sediment transport potential especially when a heavy rainfall event follows shortly after disturbance [53]. Garren et al. [50] predicted potential erosion rates from their field experiment in Brazil using the Universal Soil Loss Equation [54]. Their prediction resulted in relatively high erosion rates because of the steep, long, continuous slopes of their sites without vegetation cover. In contrast, Chung et al. [55] used silt fences to measure amounts of soil erosion from a winch-assisted feller-buncher clear cut unit with silty clay loam soils in southwest Oregon, but they could not observe any measurable soil accumulation in silt fences during a one-year period post-harvesting. This result was consistent with the low soil impacts of winch-assist harvesting they found in the harvest unit—i.e., no significant change in soil bulk density and infiltrometer readings along the machine track. Chase et al. [56•] compared soil disturbance and stream-adjacent disturbance of conventional, combined, and winch-assist harvesting operations in Oregon and Washington. All harvesting methods caused disturbance of less than 1.5% of the harvesting area. Winch-assist caused greater soil disturbance than conventional steep terrain harvesting practices but was similar to other mechanized harvesting systems in combined operations. However, the disturbance level was always within the regulatory thresholds for stream-adjacent disturbance.
Although the level of soil disturbance and compaction caused by winch-assist ground-based equipment might be higher than that of conventional cable logging systems, winch-assist systems are more versatile as they can be effectively applied to various silvicultural treatments at potentially lower costs. Abbas et al. [57] pointed out that cable logging systems might be most advantageous in terms of soil disturbance, but winch-assist could significantly reduce soil impacts in areas where conventional ground-based machinery would have been used otherwise at the cost of excessive soil disturbance.
Evanson and Amishev [58] assessed soil disturbance after felling with the ClimbMAX steep slope harvester and yarding with a swing yarder. Deep soil disturbance levels (9%) including rutting and subsoil exposure of which two thirds were directly attributable to the tracked machine operating on the slope. However, subsequent to yarder extraction, the overall level of soil disturbance was found to be comparable with a cable yarding operation without mechanized felling. In a further study of the same machine, Evanson et al. [36] found that the share of deep disturbances was higher (13.7%) than during manual felling followed by whole tree yarding (8.3%). The frequency of rutting (3.3%), however, did not largely differ from the yarding operation (2.6%). Thus, the study concluded that the ClimbMAX2 does not cause additional soil disturbance compared with a conventional operation. Chung et al. [55] measured soil bulk density and compaction in winch-assist mechanized felling and manual felling areas and found neither of the methods caused significant compaction compared with pre-harvesting conditions.
For residual stand damage, Sauter et al. [15] reported that stand damage was remarkably low after felling and extraction of large dimensioned hardwood and softwood trees with a winch-assisted skidder and forwarder on slopes of up to 30% in Germany. In the case of softwoods, 8.1% of the remaining trees were damaged, while the share was 10.7% for the hardwood stand. Damage from extraction only was even lower, as about half of the damages resulted from felling operations. Dyson and Strimbu [59] completed a winch-assist felling study that included stem breakage measurement and found that a total of 42% of trees were broken at a stem diameter of 10 cm or greater. This is substantially less than typical motor-manual breakage rates, which can be as high as 90%.
System Productivity
In addition to environmental and safety benefits, potential efficiency gains and cost savings have been driving the adoption of winch-assist technology, especially in the private sector. Winch-assist harvesting systems could be more productive and cost-effective than conventional steep slope harvesting methods—e.g., motor-manual felling and cable yarding [55]. Motor-manual felling with chainsaws was the only tree felling method available on steep slopes before the advent of winch-assist technology. Moreover, without ground vehicle access, felled trees had to be extracted via cable yarding or helicopter which could be substantially more expensive than ground-based extraction [60]. This means winch-assist technology makes traditionally economically marginal harvest units more attractive and economically viable [43].
While winch-assisted machinery brings many of the advantages of fully mechanized harvesting onto steep terrain, the need to set up the wire rope can have negative effects on productivity. For example, Brandtner [61] analyzed the setup procedure of an integrated winch-assisted harvester (John Deere 1170E with HAAS Highgrade) and found that the setup procedure in his field trial took 13.7% of the productive work time. For a winch-assisted forwarder (John Deere 1110E with HAAS Highgrade), Holzfeind et al. [62•] reported that the setup procedure took about 9.5% of total working time.
Strimbu and Boswell [52•] also conducted a field trial where they directly compared winch-assist skidding with conventional skidding operations. They reported that the setup procedure for winch-assist took about 23% of productive time. Despite the extra setup procedure, they found winch-assist skidding to be superior to conventional skidding when skidding distance is longer than 70 m and the ground slope is steeper than 18%, mainly due to the extra power and traction provided by the winch-assist, which allowed larger loads and higher travel speed. This study shows that there is a trade-off between productive time loss due to setup procedure and efficiency gain due to higher travel speed and better controlled operation of the machine.
In addition to the time and effort to set up, increased slope could also have a negative influence on productivity, as operating fully mechanized harvesting machinery on steep terrain is more challenging for the operators. Holzfeind et al. [62•] confirmed that an increasing slope had a negative influence on the productivity of the winch-assisted forwarder during their field study. This trend was also found in a winch-assisted skidder study in Canada [52•]. In contrast, Brandtner [61] could not observe a negative influence of an increasing slope for a winch-assisted harvester.
Petitmermet et al. [63] conducted a trial where they directly compared productivity of a cut-to-length harvesting system with and without winch-assist. They found that using winch-assist decreased productivity and utilization rate for both harvester and forwarder. They attributed the reduced productivity and utilization to the effects of winch cable, operational difficulty on steep slopes, and the vegetation characteristics (e.g., lower stocking, smaller trees) associated with steeper slopes. A strong caveat to this study is that a winch-assist system was implemented on terrain where it was not required, but it does demonstrate that winch-assist is more cumbersome to operate when it is not needed.
Green et al. [22••] compared harvester-forwarder productivity with and without winch assistance in western Oregon and found that winch-assisted harvester had a lower productivity partly due to more stops made during winch-assist operations. Forwarder productivity was comparable in both winch-assist and non-assisted cases. Holzfeind et al. [62•] estimated additional extraction costs for winch-assist extraction with a John Deere 1110E at about 1€ per cubic meter. However, this estimate can be highly variable with the input parameters of their cost model. Combining the above knowledge does indicate that winch-assist is of advantage where standard systems cannot be employed or only at the expense of undesired effects to soil and stand.
Amishev & Dyson [64] conducted a field study aiming to quantify the productivity of winch-assisted feller-buncher and grapple yarding in northern British Columbia, Canada. The harvest sites were mixed conifer stands located in steep terrain ranging from 40 to 85% in slope. The harvest was completed during the winter season when the ground was frozen and covered with snow. The average productivity of the feller-buncher was 42.8 m3 per productive machine hour (PMH). The low productivity was attributed to relatively small piece size, high tree mortality by mountain pine beetle attack, and steep frozen ground conditions that limited equipment maneuverability.
Winch-assist mechanized felling can also help improve productivity of subsequent timber extraction, such as cable and grapple yarding, through its capability of pre-bunching [65]. Chung et al. [55] found in their field study that the cost of tree felling was more expensive when a winch-assisted feller-buncher was used compared with manual felling, but pre-bunching trees by the feller-buncher significantly improved cable yarding productivity, resulting in an approximately 30% reduction in stump-to-landing costs when both felling and yarding costs were combined. Dyson and Strimbu [59] completed a winch-assist felling study that included stem breakage measurement and found that a total of 42% of trees were broken at a stem diameter of 10 cm or greater. This is substantially less than typical motor-manual breakage rates, which can be as high as 90%.
Leslie [19] conducted a series of six utilization trials, three in New Zealand and three in British Columbia. The average productivity recorded was 61 m3/PMH, ranging from 34 to 102 m3/PMH. The site with the lowest productivity was a result of small piece size, and conversely the largest productivity was a result of both large piece size and long even slopes. The average utilization recorded was 52%, ranging from 25 to 63%. Delays and shoveling were common, accounting for 48% of the total recorded time (delay 37%, shoveling 11%). Operational delays included relocating the anchor machine, moving settings, line handling, and fueling.
Conclusions
Winch-assist harvesting systems have seen rapid adoption and implementation in Europe, New Zealand, and North America during the last 10 years and continue to do so in other parts of the world. They can be considered one of the major innovations in steep terrain harvesting in the twenty-first century. Though initially driven by soil protection considerations particularly in Europe, recent developments focused on the expansion of ground-based, mechanized harvesting to steep terrain and improvement of work safety. However, its ability to reduce negative impacts on soils could also be of interest even in gentle terrain, especially where soils are wet or unstable. Scandinavia, the Baltics, Russia, and Canada, where the use of winter logging on frozen ground is common to protect sensitive soils, face shortening operating seasons due to changing climate. Careful use of the winch-assist technology in those regions could be a solution to shortening operating seasons and soil impact concerns. As the winch-assist technology is getting widely implemented across the globe, the body of literature has grown, as well as the understanding of the benefits and limitations of the technology on safety, economic, and environmental performance.
Investigation of winch-assist systems has intensified especially during the last 5 years with a focus on machine stability, operability, environmental impacts, and system productivity. Research concerning worker safety, however, has been relatively limited. More research related to safety is required to improve the understanding of safety hazards associated with winch-assist operations and address how to prevent potential accidents, injuries, and fatalities. Moreover, there are still many unknown environmental impacts that may be involved with the winch-assist technology. Not only immediate interactions between machine and ground but also long-term impacts of machine traffic on soils, erosion potential, and vegetation growth should be investigated under varying ground and climate conditions. System productivity has been studied over the past decade, but these studies were often limited in their scope to offer systematic comparison of productivity and costs between winch-assist and conventional systems.
This review summarizes the present body of literature on winch-assist systems and is intended to provide a comprehensive introduction to the topic. It identifies considerable need and potential for future research with regard to social, environmental, and economic aspects. So far, winch-assist technology has proven to be a robust and safe system that increases the operating range of ground-based and mechanized harvesting systems.
References
Papers of particular interest, published recently, have been highlighted as: • Of importance •• Of major importance
Hunter AGM. A review of research into machine stability on slopes. Saf Sci. 1993;16(3–4):325–39. https://doi.org/10.1016/0925-7535(93)90052-F.
Visser R, Stampfer K. Expanding ground-based harvesting onto steep terrain: a review. Croat J For Eng. 2015;36(2):321–31.
Amishev D. Winch-assist technologies available to Western Canada. Vancouver: FPInnovations; 2016. Technical report no. 37. 48
Visser R, Harrill H. 2016 Cable-assist workshop – improving operations. Rotorua: Future Forests Research; 2016. Report No. H029. 32
International Organization for Standardization (ISO). Working draft of the ISO 19472-2 standard for traction aid winches. ISO, ISO/TC 23/SC 15/WG 4; 2019.
Visser R. Tension monitoring of a cable assisted machine. Rotorua: Future Forests Research; 2013. Harvesting Technical Note HTN05–11. 5
McKenzie DW, Richardson BY. Feasibility study of self-contained tether cable system for operating on slopes of 20–75%. J Terrramech. 1978;15:113–27. https://doi.org/10.1016/0022-4898(78)90015-0.
Hartsough BR, Miles JA, Gaio C, Frank AA. Cable-towed vehicles for harvesting on mountainous terrain. In: proceedings of the international mountain logging and Pacific northwest skyline symposium; Portland, USA; 1988.
Dyson P. Winch-Assist Technology for Steep Slope Harvesting [Internet]. Presentation at Timber Measurement Society 2014 2020. Available from: http://www.timbermeasure.com/PDX_2017/06-D1.pdf. Accessed 07 Jan 2020.
Bombosch F, Sohns D, Nollau R, Kanzler H. Are forest operations on steep terrain (average of 70% slope inclination) with wheel mounted forwarders without slippage possible?. In: Proceedings of the 36th International Symposium on Forestry Mechanisation: “High Tech Forest Operations for Mountainous Terrain”; Schlägl, Austria; 2003.
Wratschko B. Einsatzmöglichkeiten von Seilforwardern. MS Thesis. Vienna: University of Natural Resources and Life Sciences; 2006. p. 66.
Sebulke J. Holzernte mit Traktionswinden Forst & Technik 2011;3:20–26.
Oberer F. Symbiose aus Rad und Seil. Wald und Holz. 2012;1:29–30.
Weise G. Traktionshilfswinden – Besser im Hang. Forsttechnische Informationen. 2016;5:7–14.
Sauter UH, Sauter F, Balle F, Lelek S, Mohrlok R. Motor-manual harvesting system for large dimensioned timber (LTD) on steep slopes supported by skidders equipped with traction Stabilising winch. In: Proceedings of the 45th International Symposium on Forestry Mechanisation: “Forest engineering: Concern, Knowledge and Accountability in Today’s Environment”; Dubrovnik, Croatia; 2012
Sutherland B. Review of tethered equipment for steep-slope operations. Vancouver: FPInnovations; 2012. Internal Report IR-2012-08-20. 11
Amishev D, Evanson T. Innovative methods for steep terrain harvesting. In: proceedings of the 43th international symposium on forestry mechanisation: “Forest engineering: meeting the needs of the society and the environment”; Padova, Italy; 2010
Harrill H, Visser R. Tension monitoring of Winch-Assist systems: update. Rotorua: Forest Growers Research; 2017. Harvesting Technical Note HTN09–07. 7
Leslie C. Productivity and utilisation of winch-assist harvesting systems: case studies in New Zealand and Canada. MS Thesis. Christchurch: University of Canterbury; 2019. p. 77.
•• Garland J, Belart F, Crawford R, Chung W, Cushing T, Fitzgerald S, et al. Safety in steep slope logging operations. J Agromed. 2019;24(2):138–45. https://doi.org/10.1080/1059924X.2019.1581115. This article compares hazards of traditional and new steep terrain harvesting systems and outlines future research questions with regard to worker safety.
Oregon Occupational Safety and Health (Oregon OSHA). Oregon OSHA’s revised guidelines for using tethered logging systems [Internet]. Salem (Oregon) [updated 2016 Jun; cited 2020 Jan 08]. Available from: https://osha.oregon.gov/rules/advisory/faac/Documents/Tethered-Logging-Guidelines.pdf.
•• Green P, Chung W, Leshchinsky B, Belart F, Sessions J, Fitzgerald S, et al. Insight into the productivity, cost and soil impacts of cable-assisted harvester-forwarder thinning in Western Oregon. For Sci. 2019;66(1):82–96. https://doi.org/10.1093/forsci/fxz049. This study clearly shows how soil impacts differ between conventional and winch-assist operations and that winch-assist can reduce soil impact both in extent and degree.
Ellegard J. Finding the perfect steep slope harvesting system. NZ Logger. 2015;6:21–7.
Schaare R, Hunter H, Visser R. Tension monitoring of cable-assisted felling machines. Rotorua: Future Forests Research; 2016. Report No. H028. 17
Bell JL. Changes in logging injury rates associated with use of feller-bunchers in West Virginia. J Saf Res. 2002;33(4):463–71. https://doi.org/10.1016/S0022-4375(02)00048-8.
Bonauto DK, Wuellner SE, Marcum JL, Adams DA. Injury rate comparisons for nonmechanized and mechanized logging operations, Washington state, 2005-2014. J Agromed. 2019;24(2):205–14. https://doi.org/10.1080/1059924X.2019.1566106.
Work Safe New Zealand. Progress towards the 2020 injury targets [Internet]. Wellington (New Zealand) [updated 2018 Oct; cited 2020 Jan 08]. Available from: https://worksafe.govt.nz/.
Marchi L, Mologni O, Trutalli D, Scotta R, Cavalli R, Montecchio L, et al. Safety assessment of trees used as anchors in cable-supported tree harvesting based on experimental observations. Biosyst Eng. 2019;186:71–82. https://doi.org/10.1016/j.biosystemseng.2019.06.022.
HAAS Maschinenbau GmbH & Co. KG. Bedienungsanleitung für JD Harvester mit HAAS-Traktionshilfsseilwinde. 2011.
Komatsu. Mehr Sicherheit: Grundlagen und Tipps für den sicheren und praxisnahen Einsatz Ihrer Komatsu Forstmaschine. 2015.
•• Holzleitner F, Kastner M, Stampfer K, Höller N, Kanzian C. Monitoring cable tensile forces of Winch-Assist harvester and forwarder operations in steep terrain. Forests. 2018;9(2):53. https://doi.org/10.3390/f9020053. The publication describes a systematic survey protocol for monitoring tensile forces for winch-assisted machinery and its interaction with work phases and machine tilt.
Mologni O, Dyson P, Amishev D, Proto AR, Zimbalatti G, Cavalli R, et al. Tensile force monitoring on large winch-assist forwarders operating in British Columbia. Croat J For Eng. 2018;39(2):193–204.
Holzfeind T, Kanzian C, Stampfer K, Holzleitner F. Assessing cable tensile forces and machine tilt of winch-assisted forwarders on steep terrain under real working conditions. Croat J For Eng. 2019;40(2):281–96. https://doi.org/10.5552/crojfe.2019.621.
•• Sessions J, Leshchinsky B, Chung W, Boston K, Wimer J. Theoretical stability and traction of steep slope tethered feller-bunchers. For Sci. 2017;63(2):192–200. https://doi.org/10.5849/forsci.16-069. This paper describes the theoretical framework for evaluating the stability of winch-assisted tracked machinery on steep terrain and by which factors it is affected.
Belart F, Leshchinsky B, Sessions J, Chung W, Green P, Wimer J, et al. Sliding stability of cable-assisted tracked equipment on steep slopes. For Sci. 2019;65(3):304–11. https://doi.org/10.1093/forsci/fxy064.
Evanson T, Amishev D, Parker R, Harrill H. An evaluation of a ClimbMAX steep slope harvester in Maungataniwha Forest, Hawkes Bay. Rotorua: Future Forests Research; 2013. Report No.: H013. 16
Ministry of Business, Innovation & Employment (MBIE). Approved code of practice for safety and health in forest operations. Wellington: Ministry of Business, Innovation & Employment; 2012.
Oregon Occupational Safety and Health (Oregon OSHA). Yarding and Loading Handbook [Internet]. Salem (Oregon) [updated 2010 Jun; cited 2020 Jan 08]. Available from: https://osha.oregon.gov/OSHAPubs/1935.pdf.
Pestal E. Seilbahnen und Seilkrane für Holz- und Materialtransport. Wien u.a.: Fromme; 1961.
Smith J, McMahon S. Stump anchorage capacity on two contrasting soil types. Rotorua: Logging Industry Research Organisation; 1995. Report Vol. 20 No. 22. 6
Lyons K, Sessions J, Wimer J. Design of continuous bridle multiple-stump anchors. Int J For Eng. 2019;31:1–8. https://doi.org/10.1080/14942119.2020.1685833.
Leshchinsky B, Sessions J, Wimer J. Analytical design for mobile anchor systems. Int J For Eng. 2015;26(1):10–23. https://doi.org/10.1080/14942119.2015.1023014.
Cavalli R, Amishev D. Steep terrain forest operations–challenges, technology development, current implementation, and future opportunities. Int J For Eng. 2019;30(3):175–81. https://doi.org/10.1080/14942119.2019.1603030.
Amishev D, Hunt J. Winch-assist harvester: Best Practice Manual. Vancouver: FPinnovations; 2018. Special publication SP-533. 70
Donald K, Boswell B, Amishev D, Hunt J. Winch-assist forwarder: Best Practice Manual. Vancouver: FPinnovations; 2018. Special publication SP-535. 69
FPInnovations (FPI). Wire Rope integrity in Winch-Assisted Harvesting Operations. Vancouver: FPinnovations; 2017. p. 24.
Naillon T. Timber faller perspectives on tethered logging operations. Olympia: Safety and Health Assessment and Research for Prevention (SHARP) Program; 2017. Technical Report Number 11-3-2017
Naillon T, Rappin C. Best management and operating practices for steep slope machine logging. Olympia: Safety and Health Assessment and Research for Prevention (SHARP) Program; 2019. Technical Report Number 98-02-2019
Cambi M, Certini G, Neri F, Marchi E. The impact of heavy traffic on forest soils: a review. For Ecol Manag. 2015;338:124–38. https://doi.org/10.1016/j.foreco.2014.11.022.
• Garren AM, Bolding MC, Aust WM, Moura AC, Barrett SM. Soil disturbance effects from tethered forwarding on steep slopes in Brazilian eucalyptus plantations. Forests. 2019;10(9):721. https://doi.org/10.3390/f10090721. A designed study focusing on the effects of winch-assisted forwarder payload, slope and track configuration on soil bulk density, rut depth and erosion rates.
Forbrig A, Hofmann R, Seeling U. Bodenschonende Holzernte: Abschlussbericht zum Auftrag der FCK an das KWF. Groß-Umstadt: Kuratorium für Waldarbeit und Forsttechnik; 2010. p. 40.
• Strimbu V, Boswell B. Adverse skidding using a Tigercat 635E assisted by a T-winch 10.1. Vancouver, FPinnovations. 2018. Technical report no. 23. 19. This report expands winch-assist to skidders and points out that set up time consumption implicates operation parameter thresholds above which winch-assist systems are superior in terms of productivity.
Megahan W, Kidd W. Effects of logging and logging roads on erosion and sediment deposition from steep terrain. J For. 1972;70:136–41. https://doi.org/10.1093/jof/70.3.136.
Dissmeyer GE, Foster G. A guide for predicting sheet and rill erosion on forest land. Atlanta: USDA Forest Service; 1980.
Chung W, Garrelts B, Morrissette B, Green P, Leshchinsky B, Belart F, Bladon K, Hatten J, Sessions J, Garland J. Tethered logging in Southwest Oregon: a research perspective. Presentation at Western Regional Council on Forest Engineering Conference. 2019. https://westernforestry.org/wp-content/uploads/2018/10/2_2019-WR-COFE-Presentation_Chung-et-al_Lone-Rock.pdf. Accessed 07 Jan 2020.
• Chase CW, Reiter M, Homyack JA, Jones JE, Sucre EB. Soil disturbance and stream-adjacent disturbance from tethered logging in Oregon and Washington. For Ecol Manag. 2019;454:1–9. https://doi.org/10.1016/j.foreco.2019.117672. The first study that compares the soil disturbance level after conventional and winch-assist harvesting operations on a large scale.
Abbas D, Di Fulvio F, Spinelli R. European and United States perspectives on forest operations in environmentally sensitive areas. Scand J For Res. 2018;33(2):188–201. https://doi.org/10.1080/02827581.2017.1338355.
Evanson T, Amishev D. ClimbMAX2 steep slope harvester. Rotorua: Future Forests Research; 2013. Harvesting Technical Note HTN05–07. 6
Dyson P, Strimbu V. Remote operated bulldozer (ROB) assisting a feller director: productivity and felling breakage assessment. Vancouver: FPInnovations; 2018. Technical report no. 29. 16
LeDoux C, Huyler N. Cost comparisons for three harvesting systems operating in northern hardwood stands. Res. Pap. NE-715. Newtown Square: U.S. Department of Agriculture, Forest Service, Northeastern Research Station; 2000. https://doi.org/10.2737/NE-RP-715.
Brandtner N. Produktivitätsevaluierung des seilgestützten Harvesters John Deere 1170E. MS Thesis. Vienna: University of Natural Resources and Life Sciences; 2018. p. 49.
• Holzfeind T, Stampfer K, Holzleitner F. Productivity, setup time and costs of a winch-assisted forwarder. J For Res. 2018;23(4):196–203. https://doi.org/10.1080/13416979.2018.1483131. This publication deals with the additional time consumption from installing the cable in winch-assist forwarder operations and includes a productivity model as well as a cost calculation.
Petitmermet J, Sessions J, Bailey J, Zamora-Cristales R. Cost and productivity of tethered cut-to-length Systems in a dry-Forest Fuel-Reduction Treatment: a case study. For Sci. 2019;65(5):581–92. https://doi.org/10.1093/forsci/fxz010.
Amishev D, Dyson P. Falcon Forestry Equipment (FFE) Winch-Assist Harvesting System. Vancouver: FPInnovations; 2018. Technical report no. 39. p. 16.
Acuna M, Skinnell J, Mitchell R, Evanson T. Bunching stems in steep slopes for efficient yarder extraction. CRC For Bull 2011. http://research.usc.edu.au/vital/access/services/Download/usc:17454/SOURCE1. Accessed 07 Jan 2020.
Funding
Open access funding provided by University of Natural Resources and Life Sciences Vienna (BOKU).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
Thomas Holzfeind, Rien Visser, Woodam Chung, Franz Holzleitner, and Gernot Erber declare that they have no conflict of interest.
Human and Animal Rights and Informed Consent
This article does not contain any studies with human or animal subjects performed by any of the authors.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article is part of the Topical Collection on Forest Engineering
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Holzfeind, T., Visser, R., Chung, W. et al. Development and Benefits of Winch-Assist Harvesting. Curr Forestry Rep 6, 201–209 (2020). https://doi.org/10.1007/s40725-020-00121-8
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40725-020-00121-8