
Abstract
This paper incorporates the incentives of tax inspectors into an equilibrium model of tax compliance and enforcement when the taxpayers’ true income is private information (‘adverse selection’) and the effort of tax inspectors to verify reported income is unobservable (‘moral hazard’). It characterizes the optimal remuneration for tax inspectors, which is a function of discovered tax evasion, paying particular attention to the determinants of the power of incentives and the curvature of the optimal reward scheme. It is shown that the structure of the optimal reward is increasing, and in general non-linear, in the magnitude of discovered tax evasion. The equilibrium characterized has the features that: taxpayers with higher true income underreport less and tax inspectors’ auditing effort, and hence the probability of detecting tax non-compliance, decreases with reported income.



Similar content being viewed by others

Notes
There are substantial sums involved behind tax non-compliance. See, for example, Cabral et al. (2014).
Such performance rewards in tax administrations, as a tool in motivating the tax personnel, are not uncommon with over three quarters of tax administration bodies ‘...hav[ing] some flexibility to reward good performance,’ p. 148, OECD (2013).
The analysis here abstracts from other schemes that reward performance (such as promotions). For a comprehensive survey of alternative performance reward schemes see Konrad (2008). This is an issue that is left to future research.
The model analyzed also shares elements with the literature that focuses on the design of incentive schemes under both moral hazard and adverse selection, (see, for example, Picard 1987; Guesnerie et al. 1989). But the analytics here are developed within a set up that is distinctively different from the one employed in that literature. In a standard moral hazard problem, the distribution of output is exogenously given conditional on the agent’s unobservable effort. If the distribution of output satisfies the so-called monotone likelihood ratio property, then higher output is used by the principal as evidence of higher effort. As a result, the agent’s compensation increases with output. In the present set up, the tax inspector’s reward depends on tax evasion, which is not exogenous conditional on the inspector’s effort, but rather it is chosen by the taxpayer. This, as will be seen, besides the analytical interest, introduces an important link between tax non-compliance and enforcement which has been, rather surprisingly, neglected in the fairly sizeable tax evasion, theoretical and empirical, literature.
The perspective taken here is that the government delegates the responsibility of auditing to the tax inspector because it is too expensive for it to perform the auditing function by itself and that the revenue authority has the expertise needed to perform the tasks required.
The taxpayer is required to file a report to the tax office and all tax reports are audited. It is the intensity of auditing and, therefore, its success that is a choice variable. There are, of course, additional measures that can be used to detect non-compliance (such as data matching from different sources and third-party reporting). Here the focus is on audits made by qualified tax auditors.
Naturally, one can also think of this in terms of the tax inspector deciding on the intensity of tax inspection. Also the audit is final and conclusive.
Success here is taken to mean that the inspector has gathered sufficient evidence to prove that the taxpayer has concealed taxable income. Reinganum and Wilde (1986) assume that the taxpayer is investigated with a probability and, if it is investigated, success is certain. Their formulation is equivalent to ours, putting the moral hazard issue aside, when one focuses on the probability of successful detection of tax evasion, which is what matters for the taxpayer when he decides how much income to conceal.
As it will become evident later on, the inspector obtains rents, so its expected utility is strictly positive even when \(w=0\). This implies that the inspector’s participation constraint is satisfied (assuming a zero outside option). It is also assumed that a limited liability constraint must be satisfied so that \(w\ge 0\) and \(b(I-x)\ge 0\). Also neither the tax schedule nor the penalty is in the control of the revenue authority or the tax inspector. Both the revenue authority and the tax inspector take these structures are given.
A pooling equilibrium, where all types of taxpayers evade the same amount, and the inspector’s reward is constant, does not exist, when a separating equilibrium exists.
A formal definition of the equilibrium is given in Sect. 3.
The fixed compensation w has been set, for simplicity, to zero.
It can be readily shown that, at an interior solution, the second-order condition is satisfied. It can be also easily verified that the presence of moral hazard on the part of the tax inspector induces inefficiency in the level of effort being exerted and so the audit probability.
This follows from the fact that \(z'(e)=(c''(e)p'(e)-c'(e)p''(e))/(p'(e))^2>0\) where the inequality follows from \(p'(e),c'(e)>0\) and \(c''(e)>0> p''(e)\).
Note the differences and similarities between the likelihood ratio in this model and the one in standard moral hazard models. In a standard moral hazard model, f(q|e) is the density of output as a function of the agent’s effort and the likelihood ratio is \(f_e(q|e)/f(q|e)\), where \(f_e\) is the derivative with respect to e. In our three-player model, the equivalent of output q is the successful detection of tax evasion y. The probability of success is in the direct control of the inspector, but tax evasion y is not, as it is chosen by the taxpayer. Moreover, the likelihood ratio in our model is with respect to the reward b and not with respect to effort e, although b affects e.
Following similar steps as in Reinganum and Wilde (1986).
This follows again from (17) and the fact that \(y'_{0}(x)<0\) requires \(1-p(b(y))(1+\pi )>0\). This implies—recalling that \(p(b(y))\equiv p(f(b(y)))\)—that \(y'_{0}(x)<0\) if \(b_0<p^{-1}(f^{-1}(1/(1+\pi )))\equiv b_2\).
The analysis has abstracted from the consideration that the tax inspector might be dishonest and engage in collusive behavior with the taxpayer so the latter underreports the discovered tax evasion in return of a side payment from the taxpayer (for elements of this see Hindriks et al. 1999). Such collusion will be mutually profitable if and only if \(b(y)<t\pi y\), that is, if the loss to the inspector in terms of the foregone reward when he does not report the evasion to the revenue authority is less than the gain of the taxpayer in terms of the saved tax penalty. A sufficient condition for a collusion-proof reward is \(b^{\prime }\ge t\pi \), which, together with \(b(\overline{y})>0\), guarantees that \(b_0(y)\ge t\pi y\). If \(\pi \le 1\), the above condition is always satisfied when the inspector’s reward is either linear or convex in y. Collusion-proofness can also arise even when the reward is concave in y (details are available upon request).
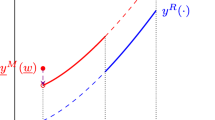
Notice that the figures depict the shapes of the relevant functions and not their levels which have been chosen arbitrarily. Examples underlying the Theorem exist. See the longer version of this paper, Kotsogiannis and Serfes (2015).
But they neither need be symmetric nor the performance reward of the revenue authority should be of the egalitarian form.
The details are available upon request.
Notice that to arrive at (31), during differentiation the inspector’s effort e(x) responds to changes in the type of the taxpayer in the sense that \(y(x)=r^{-1}(x)-x=I-x\), \(y^{\prime }(x)=r^{-1\prime }(x)-1\) and \( y^{\prime \prime }(x)=r^{-1\prime \prime }(x)\).
Of course, this is only one equilibrium among, possibly, a continuum of equilibria, each one corresponding to a different initial condition. Nevertheless, all equilibria share the same qualitative properties.
References
Allingham, M., Sandmo, A.: Income tax evasion: a theoretical analysis. J. Public Econ. 1, 323–338 (1972)
Andreoni, J., Erard, B., Feinstein, J.: Tax compliance. J. Econ. Lit. 36(2), 818–860 (1998)
Besley, T., McLaren, J.: Taxes and bribery: the role of wage incentives. Econ. J. 103, 119–141 (1993)
Birkhoff, G., Rota, G.: Ordinary Differential Equations. Wiley, New York (1989)
Cabral, A.C.G., Kotsogiannis, C., Myles, G.: Self-employment underreporting in Great Britain, who and how much? In: TARC Working Paper, pp. 010–14 (2014)
Chander, P., Wilde, L.: A general characterization of optimal income taxation and enforcement. Rev. Econ. Stud. 65, 165–183 (1998)
Crémer, H., Marchand, M., Pestieau, P.: Evading, auditing and taxing. J. Public Econ. 43, 67–92 (1990)
Guesnerie, R., Picard, P., Rey, P.: Adverse selection and moral hazard with risk neutral agents. Eur. Econ. Rev. 33, 807–823 (1989)
Hashimzade, N., Myles, G., Tran-Nam, B.: Application of behavioural economics to tax evasion. J. Econ. Surv. 1–37 (2012)
Hindriks, J., Keen, M., Muthoo, A.: Corruption, extortion and evasion. J. Public Econ. 74, 395–430 (1999)
Konrad, K.: Strategy and Dynamics in Contests. Oxford University Press, Oxford (2008)
Kotsogiannis, C., Serfes, K.: Optimal performance reward, tax compliance and enforcement. In: TARC Working Paper, pp. 013–15 (2015)
Mookherjee, D., Png, I.: Corruptible law enforcers: how should they be compensated? Econ. J. 105, 145–159 (1995)
OECD: Tax administration 2013: comparative information on OECD and other advanced and emerging economies. OECD Publishing, Singapore (2013). doi:10.1787/9789264200814-en
Picard, P.: On the design of incentive schemes under moral hazard and adverse selection. J. Public Econ. 33, 305–331 (1987)
Reinganum, J., Wilde, L.: Income tax compliance in a principal-agent framework. J. Public Econ. 26, 1–18 (1985)
Reinganum, J., Wilde, L.: Equilibrium verification and reporting policies in a model of tax compliance. Int. Econ. Rev. 27, 739–760 (1986)
Slemrod, J., Yitzhaki, S.: Tax avoidance, evasion, and administration. In: Handbook of Public Economics, 1st edn, vol. 3, chap. 22, pp. 1423–1470. Elsevier, London (2002)
Yitzhaki, S.: A note on income tax evasion: a theoretical analysis. J. Public Econ. 3, 201–202 (1974)
Acknowledgments
Much of this work was completed while Kotsogiannis was a visiting scholar at Drexel University, the hospitality of which is gratefully acknowledged. We also thank Ana Cinta Gonzalez Cabral, Thiess Buettner, Harris Dellas, Gareth Myles, Apostolis Philippopoulos, Matthias Wrede, and seminar participants at the universities of Exeter, FAU Erlangen-Nuremberg, Lugano, and at the 2nd Workshop on Public Sector Reform 2015 for comments. Any remaining errors are ours.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
Proof of Proposition 1
This appendix establishes that the tax inspector’s optimal award follows (16) and the taxpayer’s tax evasion (17).
Making use of (6) and (7), and of the fact that \(y(x)=I-x=r^{-1}(x)-x\), into (10) and rearranging gives
which upon substituting (26) into (13) gives
Substituting (27) into (26) gives
where \(\psi (b)\equiv p(b)/p^{\prime }(b)\). Since (28) holds for any admissible x, differentiating both sides with respect to x one obtains
The second-order condition given by (11), making use of (8), becomes
Equation (29) points to two cases: (i) \(y^{\prime }(x)=0\) and (ii) \(y^{\prime }(x)\ne 0\).
Case (i): If \(y^{\prime }(x)=0\), then from (27) follows that \(p(b)=1/(1+\pi )\), which implies that \(b(y)=f^{-1}(p^{-1}(1/(1+\pi )))=c'(p^{-1}(1/(1+\pi )))/p'(p^{-1}(1/(1+\pi )))\) (with the second equality following from the fact that \(f(\cdot )\equiv z^{-1}(\cdot )\), where \(z(\cdot )\equiv c^{\prime }(\cdot )/p^{\prime }(\cdot )\)). Differentiating (10) with respect to x, allowing also I to change according to \(r^{-1}(x)\) givesFootnote 25
where \(A<0\) is the second-order condition of the taxpayer in (30). With \(y^{\prime }(x)=0\), \(b^{\prime }(y)y^{\prime }(x)=0\), (31) is not satisfied. Clearly, for the constant reward and verification case to be an equilibrium, the taxpayer must be indifferent among all reports, in which case the second-order condition is satisfied with equality. Section 3 examines this case and shows that such an equilibrium does not exist.
Case (ii): With \(y^{\prime }\ne 0\), then (29) is satisfied if (omitting the x for ease of exposition)
which is (16). Consistency between (32) and (27) implies that \(y'(x)\) takes the form of (17). \(\square \)
Appendix 2
Proof of Lemma 1
Since, following from Proposition 1, \(b'(y)>0\), and, following from (30), \(A<0\) then from (31) it is the case that
It is thus the case that either (i) \(b^{\prime }(y)>0\), \(y^{\prime }(x)<0\), and \(r^{-1\prime }(x)>0\), or (ii) \(b^{\prime }(y)>0\), \(y^{\prime }(x)>0\), and \(r^{-1\prime }(x)<0\).
Case (ii) is ruled out since \(y(x)=I-x=r^{-1}(x)-x\) and so \(y^{\prime }(x)=r^{-1\prime }(x)-1>0\) is inconsistent with \(r^{-1\prime }(x)<0\). It follows that only case (i) holds. \(\square \)
Appendix 3
Derivation of \(\psi ''(b)\) and dependence of MCII on p(e) and c(e). Differentiating \(\psi (b_0)\) twice gives
where, recalling that \(p(b)\equiv p(f(b))\), with \(f(\cdot )\equiv z^{-1}(\cdot )\), \(z(\cdot )\equiv c^{\prime }(\cdot )/p^{\prime }(\cdot )\),
where \(f^{\prime }(b)=1/(z^{\prime }(z^{-1}(b)))>0\) and \(z^{\prime }(\cdot )=(c^{\prime \prime }( \cdot )p^{\prime }(\cdot )-c^{\prime }(\cdot )p^{\prime \prime }(\cdot ))/(p^{\prime }(\cdot ))^2\).
We turn now to MCII. Since MCII is \(b+\psi (b)\), with \(\psi (b)\equiv p(b)/p'(b)\) that MCII depends on p(e) and c(e) follows from (35). \(\square \)
Appendix 4
Proof of Theorem 1
Let \(\overline{x}\) be the highest reported income associated with the highest true income \(\overline{I}\) and let \(\overline{y}\equiv y(\overline{x} )\equiv \overline{I}-\overline{x}\) be the amount of tax evasion at the highest true income. The boundary condition of the ordinary differential equation (16) is the b that solves, following from (13),
The claim now is that if (19) is satisfied the right-hand side of (38) must be strictly positive that is, \(t(1+\pi )\overline{y} -\psi (0)>0\) which implies that \(\overline{y}>\psi (0)/(t(1+\pi ))\). To see that this is the case suppose \(\overline{y}\le \psi (0)/(t(1+\pi ))\). Then, the right-hand side of (38) is nonpositive at \(b(\bar{y})=0\) (and for any positive b) and \(b(\overline{y})=0\), since only that value satisfies (38) (with an inequality in the case of \(b(\bar{y})=0\), assuming that the reward is not allowed to take negative values). But this boundary would imply zero effort on part of the tax inspector, that is, \(f(0)=0\) and hence \(p(0)=0\). This implies, following from (19), that \(b_1(\overline{y})>0\), which in turn implies that \(b(\overline{y} )=0\) violates the condition \(b_0\ge b_1\). As it has just been established, \(t(1+\pi ) \overline{y}-\psi (0)>0\) and, it will be recalled, that \(\psi ^{\prime }(b)>0\). This implies that there exists a boundary condition for \(b^{\prime }\), \(b(\overline{y})>0\), that uniquely satisfies Eq. (38).
Next, we choose the boundary for the differential equation (17). Since \(\overline{y}\) is the lowest tax evasion, and \(b^{\prime }(y)>0\), \(b( \overline{y})\) is also the lowest. Recall that \(b_0\ge b_1\) must be satisfied. We choose as a boundary the \(\overline{y}\) that solves \(b_1( \overline{y})=b_0(\overline{y})\). This amounts to solving \(y^{\prime }(b( \overline{y}))=-1\). If this solution does not exist, it means that either \( y^{\prime }<-1\) or \(y^{\prime }>-1\) for all possible boundary conditions. In the former case, a separating equilibrium does not exist because \(r^{-1}(x) \) is decreasing in x. In the latter case, we solve \(y^{\prime }(b(\overline{y }))=-k\) and we choose the \(\overline{y}(k)\) that corresponds to the maximum \( k\in (0,1)\).Footnote 26 Once the boundary condition \(\overline{y}\) has been chosen, the \(\overline{x}\) is given by \(\overline{y}=\overline{I}-\overline{x}\). The lower bound \( \underline{x}\) is the solution to \(y_0(\underline{x})=\underline{I}- \underline{x}\). Such an \(\underline{x}\) clearly exists since \(y_0(x)\) increases as x decreases with slope less than one (in absolute) and x can approach \(-\infty \).
In addition, it is assumed that
The above condition always holds if \(\psi ^{\prime \prime }(b_0)\le 0\), that is if the reward is either linear or convex. It may also hold if \( \psi ^{\prime \prime }(b_0)\ge 0\), and so the reward is concave.
Given the assumptions outlined in text, the solutions to the differential equations, (16) and (17), that govern the evolution of the reward and the taxpayer’s reporting, respectively, exist and are unique. Further, we assume that this is true throughout \([\underline{x}, \overline{x}]\).
We next show that the taxpayer has no incentive to report an x outside the \( [\underline{x},\overline{x}]\) interval. Let \(x>\overline{x}\). The belief of the inspector is \(\tau (x)=\overline{I}\). So, \(y(x)=\overline{I}-x\) and \( y^{\prime }(x)=-1\). The optimal reward for any \(x>\overline{x}\) is now \( b_0(y)\), with \(y=\overline{I}-x\), so \(b_0(\overline{I}-x)\). Fix the type of the taxpayer at \(\overline{I}\) and consider the first-order condition of the taxpayer given by (10), re-written here for convenience,
At \(x=\overline{x}\), the first-order condition is satisfied with equality. Differentiating (40) with respect to x one obtains
The above expression is negative if and only if
which, after using the expressions for \(b^{\prime }\) and \(b^{\prime \prime }\), becomes
which is satisfied given (39).
Therefore, the slope of the taxpayer’s utility function decreases as x increases beyond \(\overline{x}\). Given that the slope is zero at \(x= \overline{x}\), it follows that it becomes negative when \(x>\overline{x}\). Thus, the taxpayer has no incentive to report an income higher than \( \overline{x}\). While so far we have set \(I=\overline{I}\), the same steps can be used to show that even if \(I<\overline{I}\) the taxpayer has no incentive to report an x higher than \(\overline{x}\). Suppose \(I<\overline{I}\). The slope of the taxpayer’s objective function is zero if he reports \(x=r(I)< \overline{x}\) and the objective function is strictly concave, implying that the slope of the objective function is negative at \(x=\overline{x}\). After this point, as we showed above, the slope becomes even more negative, making a deviation in that region unprofitable.
The same steps can be used to prove that any \(x<\underline{x}\) is a dominated strategy, using in this case \(b_0(\underline{I}-x)\) for any \(x< \underline{x}\). \(\square \)
Appendix 5
Proof of Proposition 2
Following the proof of Proposition 1, \( y^{\prime }=0\) (and so tax evasion is the same across all taxpayer types), implies \( b=f^{-1}(p^{-1}(1/(1+\pi ))). \) This, however, cannot be an equilibrium. The reason is as follows. The constant reward gives rise to a constant probability of detection \( p(e(b))=1/(1+\pi ), \) which implies that the taxpayer is indifferent among all income reports x for any I. So, he will choose some constant tax evasion consistent with this equilibrium (the constant y, denoted by \(\hat{y}\), can be determined from the first-order condition of the revenue authority (13)).
The income reports are in the interval \([\underline{I}-\hat{y}, \overline{I}- \hat{y}]\). Note, using (19), that the reward associated with the constant solution is higher than the reward from the separating equilibrium.
First, assume that \(\hat{y}<\tilde{y}(\underline{x})\). This implies that \( \underline{I}-\hat{y}>\underline{I}-\tilde{y}(\underline{x})=\underline{x}\). Consider now the taxpayer with \(I=\underline{I}\) who, according to the constant reward equilibrium, should report \(\underline{I}-\hat{y}\). Suppose this taxpayer deviates to \(x\in (\underline{x},\underline{I}-\hat{y})\). The beliefs are \(\tau (x)=\underline{I}\) and the optimal reward is now the \(b_0(y)\) which is discretely lower than the constant reward. The taxpayer becomes better off because tax evasion increased, while the probability of detection decreased. This is true for a positive measure of taxpayers.
Assume now that \(\hat{y}>\tilde{y}(\overline{x})\). This implies that \(\overline{I}-\hat{y}<\overline{I}-\tilde{y}(\overline{x})=\overline{x}\). Consider now the taxpayer with \(I=\overline{I}\) who, according to the constant reward equilibrium, should report \(\overline{I}-\hat{y}\). Suppose this taxpayer deviates to \(x\in (\overline{I}-\hat{y}, \overline{x})\). The beliefs are \(\tau (x)=\overline{I}\) and the optimal reward is now the \(b_0(y)\) which is discretely lower than the constant reward. The taxpayer becomes better off because tax evasion has decreased marginally, while the probability of detection decreased discontinuously. This is true for a positive measure of taxpayers.
Finally, because \(\tilde{y}(\overline{x})<\tilde{y}(\underline{x})\) the above two cases exhaust all the possibilities. Therefore, the constant reward cannot be an equilibrium, provided that the separating equilibrium satisfies (19). \(\square \)
Rights and permissions
About this article

Cite this article
Kotsogiannis, C., Serfes, K. Optimal performance reward, tax compliance and enforcement. Econ Theory Bull 4, 325–345 (2016). https://doi.org/10.1007/s40505-016-0092-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40505-016-0092-1