
Abstract
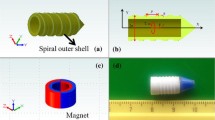
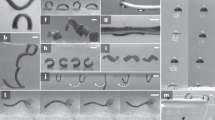
In this paper, a novel robotic system in a viscoelastic intestine environment is described. It is about a magnetically actuated compound spiral robot (CoSbot), where an external master permanent magnet (MPM) is used to actively drive the robot, embedded with an internal slave permanent magnet. First, it has a compact structure with an integrated symmetric tile and two end caps. The integrated symmetric tile is comprised of four connected tiles with spiral ribs on the outside. This compound spiral outer structure could increase the hydrodynamic pressure, making the CoSbot suspend in the intestine with a non-contact posture. Second, since CoSbot is actuated by an external MPM, the robot can be further miniaturized without a loaded battery source, nor a complex actuation mechanism. Furthermore, an electromagnetic actuation system, to generate a rotational magnetic field controlling the stable motion velocity and axial force, is presented. Ex vivo contrast experiments have shown that CoSbot swims flexibly at a higher hydrodynamic pressure and suspended gesture.
















Similar content being viewed by others

Data availability
The datasets generated and analyzed during the current study are available from the corresponding author on reasonable request.
References
Chauhan VS, Tanwar A, Nijhawan S (2019) Capsule endoscopy: what we know and what is new in the horizon. J Digest Endosc 10(2):83–89
Mori Y et al (2019) Artificial intelligence and upper gastrointestinal endoscopy: current status and future perspective. Digest Endosc 31(4):378–388
Beeley J et al (2018) Imaging fluorophore-labelled intestinal tissue via fluorescence endoscope capsule. Proc 2(13):766–769
Cummins G et al (2019) Gastrointestinal diagnosis using non-white light imaging capsule endoscopy. Nat Rev Gastro Hepat 16(7):429–447
Kolli S et al (2020) An unusual small bowel gastrointestinal stromal tumor detected via capsule endoscopy. J Gastric Cancer 51(2):1–3
Shahril R, Saito A, Shimizu A, Baharun S (2020) Bleeding classification of enhanced wireless capsule endoscopy images using deep convolutional neural network. J Inf Sci Eng 36(1):91–108
Son D, Dogan MD, Sitti M (2017) Magnetically actuated soft capsule endoscope for fine-needle aspiration biopsy. In: Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, pp 1132–1139
Le VH et al (2016) A soft-magnet-based drug-delivery module for active locomotive intestinal capsule endoscopy using an electromagnetic actuation system. Sensor Actuat A-Phys 243:81–89
Alonso O, Dieguez A, Schostek S, Schurr MO (2017) A system-on-chip solution for a low power active capsule endoscope with therapeutic capabilities for clip application in the gastrointestinal tract. J Med Robot Res 2(4):1750005
Fu Q, Guo S, Huang Q, Hirata H, Ishihara H (2016) Development and evaluation of novel magnetic actuated microrobot with spiral motion using electromagnetic actuation system. J Med Biol Eng 36(4):506–514
Kim HM et al (2010) Active locomotion of a paddling-based capsule endoscope in an in vitro and in vivo experiment (with videos). Gastrointest Endosc 72(2):381–387
Gao J et al (2016) Design and testing of a motor-based capsule robot powered by wireless power transmission. IEEE/ASME Trans Mechatron 21(2):683–693
Chen W, Yan G, Wang Z, Jiang P, Liu H (2014) A wireless capsule robot with spiral legs for human intestine. Int J Med Robot Comput 10(2):147–161
Hong Y-S, Kim J-Y, Kwon Y-C, Song SY (2010) Preliminary study on capsule endoscopes propelled by variable threads. Int Conf Biomed Eng 7(7):202–207
Zhang Y, Chi M, Su Z (2016) Critical coupling magnetic moment of a petal-shaped capsule robot. IEEE Trans Magn 52(1):1–9
Munoz F, Alici G, Zhou H, Li W, Sitti M (2018) Analysis of magnetic interaction in remotely controlled magnetic devices and its application to a capsule robot for drug delivery. IEEE/ASME Trans Mechatron 23(1):298–310
Kósa G, Jakab P, SzØkely G, Hata N (2012) MRI driven magnetic microswimmers. Biomed Microdevices 14(1):165–178
Lee C, Choi H, Go G, Jeong S, Ko SY, Park J-O, Park S (2015) Active locomotive intestinal capsule endoscope (ALICE) system: a prospective feasibility study. IEEE/ASME Trans Mechatron 20(5):2067–2074
Hoang MC, Nguyen KT, Le VH, Kim J, Choi E, Kang B, Park J-O, Kim C-S (2021) Independent electromagnetic field control for practical approach to actively locomotive wireless capsule endoscope. IEEE Trans Syst, Man, Cybern Syst 51(5):3040–3052
Rey JF, Ogata H, Hosoe N, Ohtsuka K, Ogata N, Ikeda K, Aihara H, Pangtay I, Hibi T, Kudo S, Tajiri H (2010) Feasibility of stomach exploration with a guided capsule endoscope. Endoscopy 42(7):541–545
Yokoi T, Takizawa H, Uchiyama A, Mizuno H (2003) Capsule-type medical device. U.S. Patent 20030181788 A1, Sep. 25, 2003
Liao Z et al (2016) Accuracy of magnetically controlled capsule endoscopy, compared with conventional gastroscopy, in detection of gastric diseases. Clin Gastroenterol Hepatol 14(9):1266–1273
Lucarini G, Mura M, Ciuti G, Rizzo R, Menciassi A (2015) Electromagnetic control system for capsule navigation: novel concept for magnetic capsule maneuvering and preliminary study. J Med Biol Eng 35(4):428–436
Wright SE, Mahoney AW, Popek KM, Abbott JJ (2017) The spherical-actuator-magnet manipulator: a permanent-magnet robotic end-effector. IEEE Trans Robot 33(5):1013–1024
Kim J et al (2021) Redundant electromagnetic control of an endoscopic magnetic capsule driven by multiple electromagnets configuration. IEEE Trans Ind Electron 69(11):11370–11382
Yang H et al (2020) Analytical magnetic model towards compact design of magnetically-driven capsule robots. IEEE Trans Med Robot Bio 2(2):188–195
Hoang MC et al (2019) Untethered robotic motion and rotating blade mechanism for actively locomotive biopsy capsule endoscope. IEEE Access 7:93364–93374
Zhang Y, Su Z, Chi M, Huang Y, Wang D (2016) Magnitude and orientation error correction of a superimposed spatial universal rotating magnetic vector. IEEE Trans Magn 52(5):1–9
Zhang Y, Bai J, Chi M, Cheng C, Wang D (2014) Optimal control of a universal rotating magnetic vector for petal-shaped capsule robot in curve environment. Chin J Mech Eng 27(5):880–889
Fung YC, Cowin SC (1994) Biomechanics: mechanical properties of living tissues. J Appl Mech 61(4):1007–1007
Blanchard D, Griso G (2009) Decomposition of shell deformations-Asymptotic behavior of the Green-St Venant strain tensor. C R Math 347(17–18):1099–1103
Sinaiski EG (2011) Hydromechanics: theory and fundamentals. John Wiley & Sons, New Jersey
Yu X et al (2014) Research on dynamic pressure of hydrostatic thrust bearing under the different recess depth and rotating velocity. Int J Control Autom 7(2):439–446
Funding
This work was supported by the Key Research Development and Promotion Special Project of Henan Province, under Grant 212102310119 and 212102210358, Higher Education Teaching Reform Research and Practice Project of Henan Province, under Grant 2021SJGLX288, 2021SJGLX289 and 2019SJGLX485, Educational and Teaching Reform Research and Practice Project of Henan Institute of Technology, under Grant 2021-YB023, JJXY-2021005 and 2019JG-ZD005, Scientific Research Foundation for High-level Talents of Henan Institute of Technology, under grant number KQ1869, Innovation and Entrepreneurship Training Program for College Students of Henan Province, under Grant 202211329011, 202111329014 and 202111329015, University-Industry Collaborative Education Program, under Grant 202101187010 and 202102120046, Innovative Education Curriculum Construction Project of Henan Institute of Technology, under Grant CX-2021-005, Research and Practice Project of Research Teaching Reform in Henan University, under Grant 2022-YGZD01. Key Project of 2021 in the 14th Five-year Plan of Education Science of Heilongjiang Province, under Grant GJB1421375.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by ShuaiBing Chang, Huadong Zheng, Yuanli Wang, Xiaoyan Qian, Yue Ma, Shaojie Wu and Guomiao Zhang. The first draft of the manuscript was written by Minglu Chi, and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Ethical approval
Not applicable.
Consent to participate
Informed consent was obtained from all individual participants included in the study.
Consent to publish
Authors are responsible for correctness of the statements provided in the manuscript. See also Authorship Principles. The Editor-in-Chief reserves the right to reject submissions that do not meet the guidelines described in this section.
Additional information
Technical Editor: Adriano Almeida Gonçalves Siqueira.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chi, M., Chang, S., Zheng, H. et al. Magnetic propulsion performance of a compound spiral micro-robot applied in viscoelastic environment. J Braz. Soc. Mech. Sci. Eng. 45, 468 (2023). https://doi.org/10.1007/s40430-023-04376-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-023-04376-7