
Abstract
The photovoltaic module position related to the Sun greatly affects its power production due to the latter being dependent on the irradiation incidence. One-axis trackers are used to physically move the modules so they follow the Sun’s daily trajectory and hence increase energy harvesting. This paper investigates how relevant the actuating angular step of a one-axis tracker is concerning the daily and annual energy photovoltaic energy production. An east–west rotational axis with a fixed tilt angle is experimentally analyzed with four different steps: 2°, 5°, 10°, and 30° angular movements. Results are obtained over 1 year and compared to the energy production of a fixed mount photovoltaic module. Only a maximum difference of 1.68% is observed between the tracking strategies. The sky’s condition is also considered, where clear or mostly clear days (60.9% of the analyzed period) contributed to 78.8% of energy production.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Electricity is one of the main energy sources in all industry and technology sectors and is also gaining significance in the transportation sector. Thus, the demand for electric energy is naturally increasing (IEA, 2021a), especially when considering the commercial and industrial halts caused by the COVID-19 pandemic. Sustainable growth, however, is one of society’s current major concerns, and this has led to research on alternative and renewable energy. In 2020, the share of renewable energy in global electricity generation reached almost 29%, representing a record increase of 7.1% (IEA, 2021b). Among these, photovoltaic (PV) installed power has been constantly increasing in the twenty-first century and had a 24% generation increase in 2021, second only to wind power generation (IEA, 2022).
One of PV’s main advantages is the direct conversion of solar radiation into electricity, due to the release of free electrons in a doped semiconductor exposed to sunlight. Thus, there are many research and development activities that seek to further increase their conversion efficiency through materials science, with the main advances being listed in NREL (2022), since 1976. In addition to studies on PV technology itself, many researches focus on inverter devices in order to increase their efficiency and performance, such as maximum power point tracking techniques (De Brito et al., 2019; Njomo et al., 2021).
In addition to the branches of studies mentioned to increase the performance of PV modules, there are researches and applications that combine them with other technologies/devices, such as solar concentrators (Placha, 2017; Rana et al., 2018; Gonzatti et al., 2017) and solar tracking in one and/or two axes (Jamroen et al., 2021; Jensen et al., 2022; Wu et al., 2022). How the generated electric current of a PV cell is directly dependent on the solar irradiation (Kumar et al., 2020), the maximum power generation is achieved when the PV cell is placed orthogonally to the Sun, ensuring the maximum incidence of direct sunlight over the cell’s surface. Most PV systems, however, are installed using static mounting on the ground or rooftops (Chandel & Chandel, 2021), decreasing the energy harvesting in reason of the constantly changing angle between the PV module and the Sun. A simplified ratio of the electricity not harvested by a PV module concerning its angular deviation from the Sun can be expressed by
where θ is the angle between the PV module normal vector and the Sun’s position vector relative to the module, in degrees (Katrandzhiev & Karnobatev, 2019).
Sun tracking is one of the techniques used to reduce this loss, where a moving structure is controlled to follow the Sun’s position according to the Earth’s rotation and/or translation movements. One-axis trackers are usually employed to rotation movement and may increase the PV module energy harvesting from 10 to 20% when compared to static ones, while two-axis trackers follow both rotation and translation and usually provide 20–35% energy gain (IEA, 2019). The actual tracker performance and efficacy are dependent on factors such as the tracking step, control accuracy, and others.
The solar tracking step is the angular amplitude that the PV structure is moved each time its orthogonal position related to the Sun is corrected. Therefore, the θ error allowed is directly dependent on the step amplitude since it determines how often the tracker must reposition. The step amplitude is a design choice and, generally, lower values result in higher energy harvesting since it reduces the PV module deviation from the Sun, but it also leads to more complex and expensive tracking devices. In addition, the power needed to move the tracker should also be considered and may vary according to the actuators and controllers used (Batayneh et al., 2019).
Pursuing an orthogonal position between the PV module and the Sun ensures higher electricity generation by increasing the direct solar irradiation. However, the discussion on the cost–benefit vs. orthogonal deviation is still open: if the angular step is too small, the tracker consumes more power since it needs to readjust more often, also resulting in more mechanical stress and fatigue. Conversely, large step values result in greater angular errors and fewer daily adjustments with the compromise of lower energy harvesting. Thus, this paper experimentally evaluates different strategies for one-axis trackers (east–west) as a function of their actuating angular step over a complete year to fill this gap.
This paper is organized as follows: a revision of PV tracking methods and their actuating step is presented, followed by a description of the PV power plant used for experimental verification. Then, the method is presented along with the implemented tracking strategy and the analyzed step amplitudes. Finally, experimental results are presented and the paper's conclusions are given.
2 Solar Tracker Step
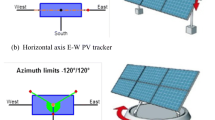
Only a continuous two-axis tracking method could ensure that the panels of a PV power plant are always perpendicular to the Sun throughout the year; however, this would require the uninterruptable moving of the mounting structure and with complete accuracy. The net gain of energy from this approach is questionable in face of both technical and financial requirements to achieve an ideal tracking. Thus, both east–west one-axis tracking (RA, rotation axis) and north–south one-axis tracking (TA, tilt axis), as shown in Fig. 1, commonly use discrete actuating steps, as shown in Fig. 2. So, the designer must choose the maximum orthogonal deviation between the PV module and the Sun. This choice results in the actuating angular step of the tracking mechanism. There are three common methods for defining the tracking step (Smirnov et al., 2019), being:
-
Three steps: with three daily actuation, this technique employs a low number of adjustments and allows a higher orthogonal deviation;
-
Discrete continuum: greatly increases the number of adjustments and is considered a quasi-continuum tracker. The angular step is usually from 1 to 3°;
-
Average steps: this strategy seeks an intermediate solution by reducing the number of actuation but still providing a satisfactory performance when compared to the discrete continuum.

East–west tracking and north–south tracking (Miotto et al., 2021)

Discreet sun tracking adapted from Miotto et al. (2021)
However, there is not a clear analysis in the literature on the compromises of defining the angular step and how it affects experimental performance. A one-axis (east–west) tracker is theoretically evaluated in Ma et al. (2011) using only three daily movements and a fixed tilt (north–south) equal to the local latitude. The authors report that this approach results in 8% lower energy harvesting when compared to a two-axis tracker. If seasonal tilt adjustments are made, it results in only 5% less power production than the two-axes tracker. Using a similar setup, but with experimental results only during the summer, authors in (Batayneh et al., 2019) find that the energy harvesting is 9–6% lower when this strategy (three daily) is compared to three hourly corrections. In the theoretical study for clear sky days of Alvarado-M et al. (2020), it was found that using two versus five daily movements there is a difference of 8.5%.
Sun trajectory tracking with a one-axis system with a 120° aperture (± 60°) is simulated for the solstice day in Alexandru (2013), and only a 0.4% energy reduction compared to the two-axes method is found. The author also presents results for a virtual PV plant operating with 2 (60°)–12 (10°) steps, summarized in Table 1. The results given in Alexandru (2013) indicate that there is not a significant energy loss if the number of steps is slightly decreased; however, the author only analyzed a single day and in clear sky conditions.
3 Tracking Method and Evaluation
An experimental PV plant (EPVP) is designed and developed to evaluate different tracking strategies and their efficacy in energy harvesting. The EPVP location is shown in Fig. 3 and is located at −29.724041° latitude and −53.710812° longitude. It is composed of 48 polycrystalline PV modules connected to the mains through individual microinverters giving an installed capacity of 12.24 kWp. These modules are divided into 4 movable structures where each of them is independently controlled with the possibility to perform solar tracking or stay in a static position. More details about the EPVP may be found in Miotto et al. (2021).

Experimental photovoltaic plant
3.1 Actuation and Control
The RA tracking movement has a 108° (± 54°) excursion controlled through a three-phase induction gear motor. The system gives a total torque of 2.520 Nm with a 36.753:1 reduction. Thus, 102 complete revolutions of the motor are needed to change the PV modules’ orientation in 1°. An inverter frequency with ramp acceleration is used to control each motor as depicted in Fig. 4. The induction motor rotating velocity and actuating period are altered according to the angular correction needed in each adjustment, either starting, stopping, or in continuous operation. This control strategy ensures not only a higher angular position accuracy but also reduces the motor inrush current and provides softer inertial movement.

Strategy for the actuating of the RA (Miotto et al., 2021)
The ‘date and time’ methodology given in NOAA (2010) is used to determine the Sun’s position while the tracking structure's actual position is obtained through an accelerometer. The position controller gives a new angular reference when the PV module deviation is greater than half of the tracking step. Also, the new reference is set to lead the Sun’s current position, as shown in Fig. 5, and the controller maintains this position within a ± 1° hysteresis from it.

Solar tracking methodology with 4° step
3.2 Error Analysis
To verify the RA actuation, an accelerometer is installed in the PV modules. An average error of 0.13 between the reference values and the accelerometer measurements is observed. This already includes the errors due to the mechanical, electrical, and control system. The accelerometer accuracy error is disregarded. The error distribution of gear motor positioning during a long-period test is shown in Fig. 6.

Error distribution of RA actuation
The electrical instrumentation system is based on the INA 260 (TI, 2016) sensor, which has a maximum error of 0.15%. The voltage and current readings performed by the system were compared with the readings of a Fluke 189 (Fluke, 2002) multimeter, which has maximum errors of 0.04% and 0.52%, respectively. Average errors of 0.06% and 0.19% were observed for current and voltage measurements, respectively. Error distribution is illustrated in Fig. 7.

Error distribution of voltage and current measurements
3.3 Tracking Strategies
Four different tracking steps are evaluated using all the available mounting structures of Fig. 3 exposed to the same ambient conditions and with a 30° tilt angle. Experimental measurements are done weekly from August 2019 to July 2020. More details on the tracking strategies evaluated are given in Table 2.
To properly evaluate the impact of different tracking steps in electricity generation, only data from clear sky days are used. This is done because the solar irradiation is mainly isotropic and diffuse on cloudy days, resulting in little to no advantage of using any position tracking mechanism. To do so, ambient conditions of all collected data are classified according to the following:
-
Clear sky: when no clouds are reported neither in the morning nor the afternoon;
-
Mostly clear: when the sky is partially cloudy in one half of the day and clear in the other;
-
Cloudy: when half of the day is cloudy or with light rain and the other is partially cloudy;
-
Rainy: when cloud density is high and/or rain is reported the whole day.
4 Results and Discussion
Even though some of the strategies perform a considerably greater number of adjustments than others, the energetic consumption among them is similar and a nonsignificant difference is observed. This is due to the accelerating ramp strategy with soft start used to drive the three-phase gear motor, besides the fact that all mounting structures move the same angular distance daily. Thus, a 17.5 Wh/day (0.16 Wh/degree) energy consumption is measured for all four mounting structures analyzed.
As expected, an energetic average increase of 22.31% is observed when using a one-axis RA tracker when compared to fixed PV modules. But to properly evaluate how the actuating steps affect the energy harvesting, each method described in Table 2 is tested and measured for a long period. Figure 8 illustrates the angular movement of all four analyzed tracking steps, for a short period, compared to the Sun’s angular movement. Similarly, Fig. 9 shows the angular movement for a whole day to highlight the difference in how many adjustments are needed when using the 2° and 30° tracking steps.

Solar tracking with different steps, October 09, 2019

Detailing of the solar tracking with the smallest and biggest step of actuation, October 09, 2019
Similar values of instantaneous power are generated by the PV modules in all four tracking strategies, as shown in Fig. 10, where the maximum and minimum energy harvesting measured is 1.529 and 1.498 kWh/day, respectively. Also, in Fig. 10, it is possible to analyze the abrupt power restoration caused by the 30° tracking step strategy, since it moves less frequently but with a greater angular step in each adjustment. This is better observed in Fig. 11, where the PV modules’ voltage and current are shown for the 2° and 30° tracking steps. Since the latter strategy allows a greater orthogonal deviation from the Sun, the generated electric current changes abruptly when the mounting structure is moved and the solar irradiance increases.

PV module electrical power with different solar tracking steps on a clear sky day, October 09, 2019

Electrical quantities of PVMs with smallest and largest solar tracking step on a clear sky day, October 09, 2019
It is also highlighted that partial shading is observed in some PV modules in the early morning and late afternoon but not in others. So, the data in these time frames were discarded to perform a fair energetic comparison among all modules in all mounting structures.
Sun tracking efficacy is compromised on cloudy days and usually does not yield a significant energy increase since most solar irradiance is diffuse and isotopically distributed. Figure 10 shows the power generation for a cloudy day where the maximum and minimum measured energy harvesting is 287 and 271 Wh/day, respectively. It is observed that the PV modules' repositioning does not significantly alter the power generation and this results in all mounting structures falsely appearing to have the same tracking strategy in Fig. 12.

Electrical power of PVMs with different solar tracking steps on a cloudy day, October 16, 2019
The electric energy harvested by each tracking strategy for the whole measured period is given in Fig. 13, where only clear sky and mostly clear days are computed and cloudy and rainy data are discarded. In total, data from 28 days in a whole year are used. The 2° tracking step strategy resulted in the higher produced energy (40.27 kWh) since it has the most daily adjustments and is less frequently deviated from the Sun. With the increase in the actuating step and, consequently, the increase in time with orthogonal deviation from the Sun, the annual energy harvesting decreases.

Amount of electricity power generation over a year for different tracking steps
A 1.68% energy difference is observed between the tracking strategies with the higher and lower number of daily adjustments. These results show that a quasi-continuum tracker is arguably not justifiable considering the need for more accurate and complex devices to perform Sun tracking with reduced steps, besides greater mechanical stresses. A 10° or 30° tracking step strategy requires cheaper sensors and mounting structures and still provides a satisfactory annual energy harvesting.
The EPVP results are compared with the simulated ones from Alexandru (2013) (described in Table 1). Table 3 gives the EPVP energy yield normalized for the 2° tracking step strategy, while the results from Alexandru (2013) are normalized for a continuous tracker. Somewhat similar findings are observed even though the analyses took place in very different locations.
Finally, the overall electric energy produced by the EPVP among all tracking strategies in all ambient conditions is presented in Table 4. The clear sky and mostly clear days 60.87% (28 days) contributed to 78.81% (159.6 kWh) of the total energy harvested, while the cloudy and rainy days summed up to 39.13% (18 days) and resulted in only 21.19% (42.9 kWh) of the produced PV energy.
5 Conclusions
The impact of the step amplitude in RA one-axis trackers on photovoltaic generation was experimentally evaluated for a long period in this paper, where a small energetic difference was observed for distinct tracking strategies. It was also observed that decreasing the angular step of the mechanical tracker increases the energy production, but this increase may not be significant enough when considering that more accurate and complex sensors and devices are needed.
The tracker power consumption was similar for all strategies and did not affect the liquid PV energy production, even for the tracking strategy with the higher number of adjustments. Also, 78.8% of the total harvested PV energy was from the clear sky or mostly clear days (60.9% days), which indicates that solar tracking loses efficacy in cloudy and rainy conditions.
References
Alexandru, C. (2013). Design and optimization of a monoaxial tracking system for photovoltaic modules. Journal of Solar Energy. https://doi.org/10.1155/2013/586302
Alvarado-M, J. F., Betancur, E., & Velásquez-Lopez, A. (2020). Optimization of single-axis discrete solar tracking. 9th International Conference on Renewable Energy Research and Application (ICRERA). https://doi.org/10.1109/ICRERA49962.2020.9242726
Batayneh, W., Bataineh, A., Soliman, I., & Hafess, S. A. (2019). Investigation of a single-axis discrete solar tracking system for reduced actuations and maximum energy collection. Automation in Construction, 98, 102–109. https://doi.org/10.1016/j.autcon.2018.11.011
Chandel, R., & Chandel, S. S. (2021). Performance analysis outcome of a 19-MWp commercial solar photovoltaic plant with fixed-tilt, adjustable-tilt, and solar tracking configurations. Progress in Photovoltaics: Research and Applications, 30, 27–48. https://doi.org/10.1002/pip.3458
De Brito, M. A. G., Alves, M. G., & Canesin, C. A. (2019). Hybrid MPPT Solution for Double-Stage Photovoltaic Inverter. Journal of Control, Automation and Electrical Systems, 30, 253–265. https://doi.org/10.1007/s40313-019-00447-0
Fluke. (2002). Model 187&189 – True RMS Multimeter. Avaliable at: https://dam-assets.fluke.com/s3fs-public/187_189_umpor0200.pdf.
Gonzatti, F., Ferrigolo, F. Z., Miotto, M., Farret, F. A., Kuhn, V. N., Franchi, D., Camargo, M. N., & Mello, M. A. S. (2017). Cálculo da disposição das placas fotovoltaicas e concentradores planos em uma estrutura com rastreamento solar. IX Congresso De Inovação Tecnológica Em Energia Elétrica & V Seminário De Eficiência Energética No Setor Elétrico, 4, 1–8.
IEA - International Energy Agency. (2019). Trands in photovoltaic applications 2019 – REPORT IEA PVPS. Photovoltaic Power System Program. Avaliable at: https://iea-pvps.org/wp-content/uploads/2020/02/5319-iea-pvps-report-2019-08-lr.pdf.
IEA - International Energy Agency. (2022). PVPS: Snapshot of global PV markets 2022. Avaliable at: https://iea-pvps.org/wp-content/uploads/2022/04/IEA_PVPS_Snapshot_2022-vF.pdf.
IEA - International Energy Agency. (2021a). Global energy review 2021a: Eletricity. Avaliable in: https://www.iea.org/reports/global-energy-review-2021a/electricity.
IEA - International Energy Agency. (2021b). Renewable power. Avaliable at: https://www.iea.org/reports/renewable-power.
Jamroen, C. J., Fongkerd, C., Krongpha, W., Komkum, P., Pirayawaraporn, A., & Chindakham, N. (2021). A novel UV sensor-based dual-axis solar tracking system: Implementation and performance analysis. Applied Energi, 299, 1–17. https://doi.org/10.1016/j.apenergy.2021.117295
Jensen, A. R., Sifnaios, I., Furbo, S., & Dragsted, J. (2022). Self-shading of two-axis tracking solar collectors: Impact of field layout, latitude, and aperture shape. Solar Energy, 236, 215–224. https://doi.org/10.1016/j.solener.2022.02.023
Katrandzhiev, N., & Karnobatev, N. (2019). Influence of the angle of fall of light on the photovoltaic panel and its optimization - literature review. Second Balkan Junior Conference on Lighting. https://doi.org/10.1109/BLJ.2019.8883613
Kumar, D., Mishra, P., Ranjan, A., Dheer, D. K., & Kumar, L. (2020). A simplified simulation model of silicon photovoltaic modules for performance evaluation at different operating conditions. Optik - International Journal for Light and Electron Optics, 204, 1–9. https://doi.org/10.1016/j.ijleo.2020.164228
Ma, Y., Li, G., & Tang, R. (2011). Optical performance of vertical axis three azimuth angles tracked solar panels. Applied Energy, 88(5), 1784–1791. https://doi.org/10.1016/j.apenergy.2010.12.018
Miotto, M., Gonzatti, F., Franchi, D., Da Silva, E. I., & Farret, F. A. (2021). Pseudo-azimuthal dual-axis solar tracking technique using the hourly method for photovoltaic modules. Journal of Control, Automation and Electrical Systems, 32, 983–991. https://doi.org/10.1007/s40313-021-00721-0
Njomo, A. F. T., Sonfack, L. L., Douanla, E. M., & Kenne, G. (2021). Nonlinear neuro-adaptive control for MPPT applied to photovoltaic systems. Journal of Control, Automation and Electrical Systems, 32, 693–702. https://doi.org/10.1007/s40313-021-00691-3
NOAA. (2010). General solar position calculations. Avaliable at: https://gml.noaa.gov/grad/solcalc/solareqns.PDF.
NREL – National Renewable Energy Laboratory. (2022). Best research-cell efficiency chart. Avaliable at: https://www.nrel.gov/pv/cell-efficiency.html.
Plachta, K. (2017). Photovoltaic system equipped with a solar concentrator and two-axis tracking system. 17th I EEE International Conference on Environment and Electrical Engineering and IEEE Industrial and Commercial Power Systems Europe EEEIC I and CPS Europe. https://doi.org/10.1109/EEEIC.2017.7977553
Rana, D., Kumar, G., & Gupta, A. R. (2018). Increasing the output power and efficiency of solar panel by using concentrator photovoltaic (cpv) and low cost solar tracker. 4th International Conference on Computational Intelligence & Communication Technology (CICT). https://doi.org/10.1109/CIACT.2018.8480199
Smirnov, A. A., Vozmilov, A. G., & Romanov, P. A. (2019). Comparison of discrete sun tracking methods for photovoltaic panels. International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM). https://doi.org/10.1109/ICIEAM.2019.8742775
TI – Texas Instruments. (2016). INA260 Precision digital current and power monitor with low-drift, precision integrated shunt. Avaliable at: https://www.ti.com/lit/ds/symlink/ina260.pdf?ts=1652124501751&ref_url=https%253A%252F%252Fwww.ti.com%252Fproduct%252FINA260.
Wu, C. H., Wang, H. C., & Chang, H. Y. (2022). Dual-axis solar tracker with satellite compass and inclinometer for automatic positioning and tracking. Energy for Sustainable Development, 66, 308–318. https://doi.org/10.1016/j.esd.2021.12.013
Acknowledgements
The authors would like to thank Companhia Estadual de Energia Elétrica—Rio Grande do Sul and the Federal University of Santa Maria for the technical and financial support to the CEESP project. This study was financed in part by the Coordenação de Aperfeiçoamento de Pessoal de Nível Superior—Brasil (CAPES/PROEX) – Finance Code 001.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Franchi, D., Gonzatti, F., Miotto, M. et al. An Experimental Study on the Angular Step of One-Axis PV Trackers and Its Impact on Energy Harvesting. J Control Autom Electr Syst 33, 1739–1746 (2022). https://doi.org/10.1007/s40313-022-00936-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40313-022-00936-9